
基于虚拟引力势场的水声传感器网络路由算法研究
2021-08-06 10:15邹宝莹张文波
沈阳理工大学学报 2021年2期
邹宝莹,张文波,郝 颖,2
(1.沈阳理工大学 信息科学与工程学院,沈阳 110159;2.辽宁工程职业学院,辽宁 铁岭112000)
水声无线传感器网络(Underwater Acoustic Wireless Sensor Network,UAWSN)已被国内外广泛研究,引起高度重视,且普遍在军事和民用工作中得以应用[1]。如反潜艇的入侵检测使用、水下作战系统、监测水下环境变化、预防海洋地震或海啸灾难的发生、水下生态探索、水下潜艇航行目标的监测和跟踪、导航辅助作用等领域。我国是一个拥有丰富的海洋资源和可用能源的大国,深入研究和发展水声无线传感器网络具有战略性和实际意义[2]。其中路由算法是保障水声无线传感器网络数据传输的关键方法,也是水声无线传感器网络体系中的重点研究方面之一,可以有效地解决路径选择问题和如何通过选择的路径把数据安全可靠地从源节点传输至目的节点。
相对于传统的部署在陆地上的无线传感器网络,水声无线传感器网络会受到海洋里洋流、密度等因素的影响,且传输链路高度动态,导致时延高、传输过程可靠性低[3]。针对这些特点,应用在陆地上的路由算法不能直接应用于水声无线传感器网络,需要设计符合水声无线传感器网络节点间的传输路由算法。
Epidemic算法[4]是由Vahdat等提出的一种基于泛洪的转发路由算法,其缺点是该路由算法会使节点消耗大量能量,过多浪费网络资源。APF算法[5]是由Khatib提出的采用虚拟力方法的算法,其缺点是由障碍物产生的斥力与节点产生的引力大小相等、方向相反,可能会出现局部最小值和局部震荡的情况,导致无限期地加大时延。针对上述算法产生的问题,本文提出基于虚拟引力势场的路由选择算法(Routing algorithm for virtual gravitational potential field,RAGPF),根据节点的剩余能量大小、历史传输成功率来建立势场模型,进而确定一条最优路径,期望更好地提高路由效率,减小相对时延,使数据可以被高效、快速地转发。
1 RAGPF路由算法
现实中的水声无线传感器节点间的数据传输受到海洋中自然环境不可抗因素的干扰,会产生延时高、链路质量低甚至传输中断的问题[6],本文利用传统的人工势场相关概念,改进算法,进而在水声传感器路由选择中运用引力势场的概念,提出一种最优路径选择算法RAGPF。
1.1 传统的人工势场
Khatib在1986年提出的人工势场法,是一种基于虚拟力方法,原理是建立一个引力势场和一个斥力势场,运动对象受到虚拟势场中的力而运动,人为定义的路障会对运动对象产生斥力[7],使之向远离路障的方向运动,目标终点的对象则会对运动对象产生引力作用。对运动对象所受的引力与斥力进行矢量合成,产生的合力会使运动目标避开路障,最终到达目标终点[8]。运动对象在人工势场中所受到的作用力如图1所示。

图1 传统人工势场法
人工势场法是用来针对运动对象,可进行人为定义的势场,是路障斥力场和目标终点引力场的重叠。假设某运动对象的位置为q(x,y,z),那么运动对象到终点的引力场函数为
(1)
式中:ξ为一个引力势场的增益系数;qg是目标终点的位置。由式(1)可得引力为
Fatt(q)=-∇Uatt=ξ|q-qg|
(2)
第i个路障对运动对象产生的斥力势场Ureqi(q)为
(3)
式中:η表示斥力势场增益系数;qoi为第i个路障的位置;doi为第i个路障的最大影响距离。那么,n个障碍物形成的总斥力势场可表示为
(4)
运动对象所受到的总斥力为
Freq(q)=-∇Ureq=
(5)
总势场为引力势场与斥力势场的重叠,即
U(q)=Uatt(q)+Ureq(q)
(6)
运动对象所受到的合力为
F(q)=-∇U(q)=Fatt(q)+Freq(q)
(7)
虽然传统的人工势场法能设计出一条相对光滑安全到达目标终点的路径,但仍存在一些有待解决的问题。当运动对象向终点移动时,若引力与斥力大小相等、方向相反时,则运动对象的势场力为零,此时运动对象易陷入局部最小值和局部振荡的情况[9];当目标终点与障碍物接近时,运动对象可能会有目标不可达的情况出现。因此,为避免上述情况的出现,本文借鉴人工势场法的思想,提出一种基于虚拟引力势场的路由算法。
1.2 优化路由算法
本文综合考虑水声传感器节点安全可靠的传输数据、节点剩余能量值的大小、历史传输成功率及在单位时间内节点可传递数据量的大小,运用虚拟引力势场的知识,当源节点向传感器节点发送请求信息时,假设节点A在接收源节点的“请求信息”后,计算节点A自身的吸引力,再向下一跳发送“请求信息”,对其余节点重复此方式,最终把信息发送到sink节点。节点间使用虚拟的引力把数据流吸引向选取的最优路径,使其高效安全地传输至sink节点。图2为虚拟引力势场的节点模型视图。

图2 虚拟引力势场的节点模型视图
1.2.1 引力场
根据库伦定律中异性电荷相互吸引的理论,把水声传感器网络抽象成一个由sink节点激发的引力势场,网络中节点均模拟为正电荷,数据流模拟为负电荷;其中sink节点的电荷量被视为无穷大,因此吸引力最大。数据流会被引力最大的节点吸引传输,最终流向sink节点。
在把水声传感器网络模拟为引力场后,对于网络中(x,y,z)处的某节点,定义sink节点对该节点数据流的吸引力F(x,y,z)为
(8)
式中:s(x,y,z)为数据量函数;Q为该节点的剩余能量;h为该节点历史传输成功率;qe为单位负载;c为单位向量;Df为节点实际状态下的能量;Dt为节点原有能量;r为该节点与sink节点间的应用距离,该应用距离是实际距离与环境影响因子的乘积,应用距离的表达式为
r=dis(xs,ys,zs,x,y,z)×v(x,y,z)
(9)
式中:dis(xs,ys,zs,x,y,z)是该节点到sink节点的实际距离;v(x,y,z)是该节点的环境影响因子。v(x,y,z)值由该节点附近对传输产生影响的障碍物(如礁石、海水密度、洋流、温度等诸多因素)决定,其尽可能地表征现实中水声传感器网络某节点的通信能力。式(8)中的s(x,y,z)表达式为
(10)
式中:a为传递数据量的调节因子;Ef(x,y,z)为该节点单位时间从上一跳节点传输中接受到的实际数据量;Et(x,y,z)为该节点在理想情况下单位时间从上一跳节点传输中接受到的数据量。
在电场概念中,为表示电场的强弱和方向,由引力场强度来形容引力场中节点的相关特性。某节点的引力场强度E(x,y,z)是指此节点处的数据流受到的吸引力F(x,y,z)与单位数据流负载q(x,y,z)的比值,表达式为
(11)
由式(11)可知,引力场强度受该节点与sink节点间的应用距离、某时刻的剩余能量和该节点附近的环境因素共同影响。
若网络结构里存在n个sink节点,则这n个节点会共同激发一个引力场,那么某个中继节点监测到的数据受到的吸引力为每个sink节点对该数据产生的引力之和。公式为(12)所示。

(12)
该节点的总引力场强度E(x,y,z)为n个sink节点产生的场强之和。

(13)
1.2.2 路由选择
计算完各节点的场强值,中继节点A在选择下一跳节点Anext时,会选择引力场强度最大值的节点Amax,因为其描述了该节点的历史传输成功率、剩余能量及单位负载等参数;与其他中继节点相比,引力场强度最大值的Anext最适合作为下一跳通信的节点,该节点发挥“引力”作用,吸引数据流的传输。若Anext不是sink节点,则采用同样方法寻找最优的下一跳节点,直到下一跳为sink节点。在找到所有通向sink节点的路径后,源节点计算每条路径的平均场强,平均场强值最大的路径为最优路径。最优路径的确定如图3所示。

图3 最优路径的确定
结合上述路由算法的阐述,RAGPF算法伪代码如表1所示。
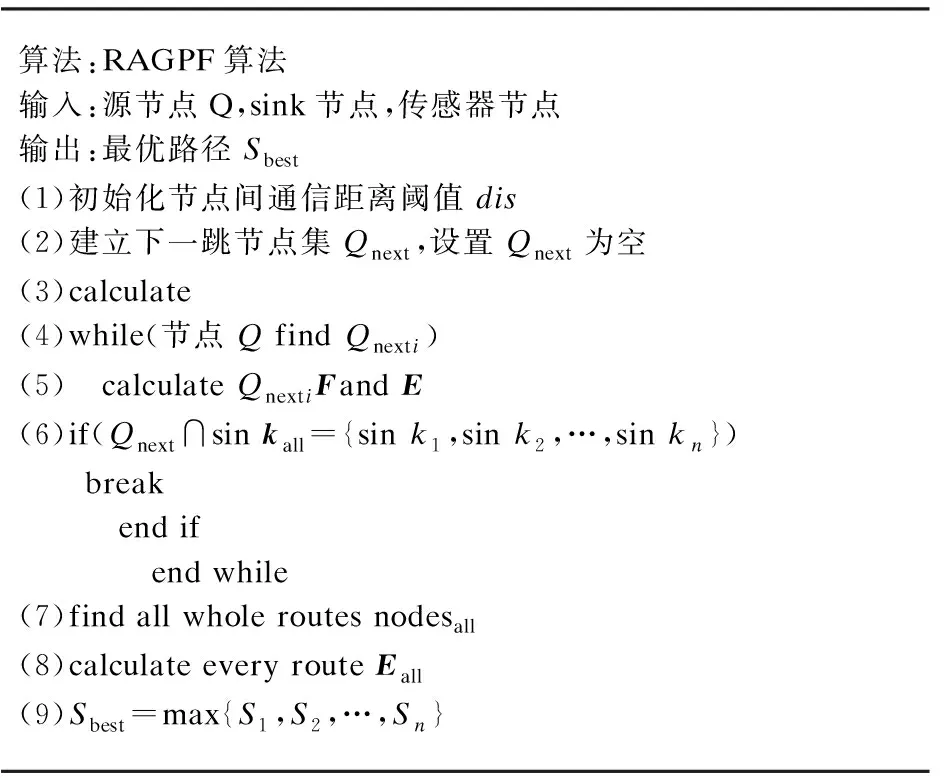
表1 算法伪代码
2 仿真验证与结果分析
本文采用NS-3仿真软件进行仿真验证,通过此仿真平台,对水声传感器网络中基于虚拟引力势场的路由算法进行可行性验证。在此基础上从数据包投递、平均端到端时延这两方面对APF算法、Epidemic算法与RAGPF算法相比较。表2为仿真参数。图4为三种算法的平均端到端时延仿真图。
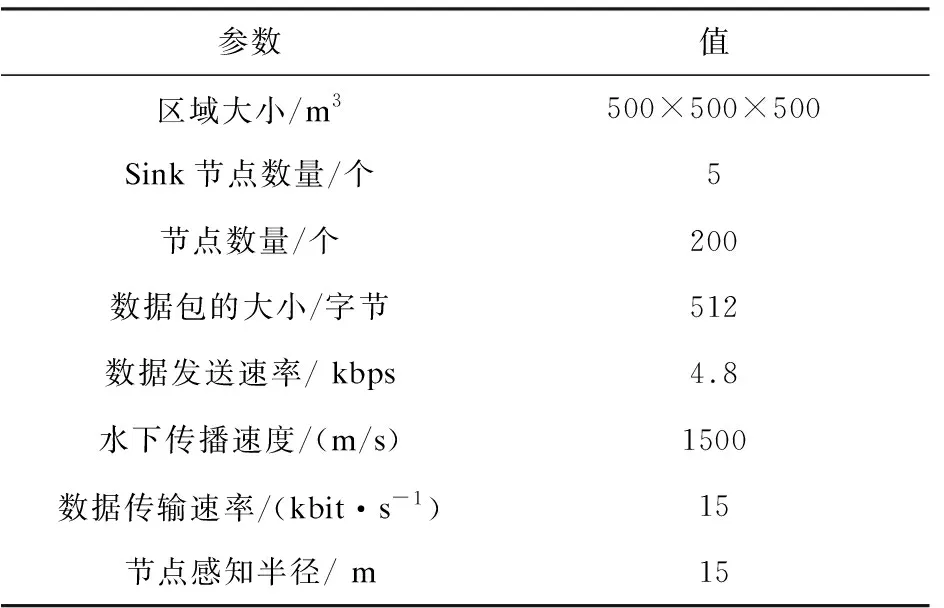
表2 仿真参数

图4 平均端到端时延
图4显示了三种算法平均端到端的时延情况。由于仿真过程对节点能量有消耗,会使中继节点出现陆续死亡,致使三种算法的时延都呈上升趋势。Epidemic路由算法会过多发送数据,在节点能量不断减少下,该算法会因为无限制洪泛产生大量的消息副本,占用路由资源,增大端到端时延。APF算法可能会陷入局部最小值和局部振荡的情况,加大了时延,对到达sink节点时间产生不确定性。RAGPF路由算法的时延相对较低且较稳定,该算法选择一条最优路径,传输时减少了网络拥塞,提高了路由效率,使数据可被高效、快速地转发。图5为三种算法的数据包投递率仿真图。

图5 数据包投递率
由图5可以看出,Epidemic、APF两种算法的投递率都偏低,是因为Epidemic算法采用泛洪机制,没有目的性的向若干中继节点传输数据包,加大了能量损耗,数据包投递率降低;APF算法很大可能性陷入环境因素,导致数据传输的成功性降低,转发效果差。而RAGPF算法会定时寻找最优路径,保证传输的可靠性,对传输数据包产生积极作用。
3 结论
针对水声传感器网络的路由选择,尽可能的保证数据安全可靠地传输至sink节点。RAGPF算法根据节点的剩余能量值的大小、历史传输成功率等因素来建立势场模型,由sink节点激发引力势场,选择出平均引力场强度值最大的路径,即传输最优路径;进而数据流流向sink节点。从仿真结果可以得出,RAGPF算法在传输时相对减少了网络拥塞,提高路由效率,保证了传输可靠性,对传输过程产生积极作用,对推动水声传感器网络中路由传输的发展具有参考价值。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
指挥控制与仿真(2021年3期)2021-06-15
汽车工程(2021年12期)2021-03-08
数字海洋与水下攻防(2020年5期)2021-01-04
计算机与网络(2020年9期)2020-07-29
电脑知识与技术(2019年22期)2019-10-31
传播力研究(2019年24期)2019-10-21
北京汽车(2019年4期)2019-09-17
福建文学(2019年12期)2019-08-06
扬子江(2016年1期)2016-05-19
