
“验证力的平行四边形定则”创新实验方案的设计
2021-03-17 06:45李铮
福建基础教育研究 2021年2期
李 铮
(福安第一中学,福建 福安 355000)
“验证力的平行四边形定则”实验是矢量运算法则在高中物理中的首次应用,学生掌握好力的平行四边形定则,对之后位移、速度、加速度、电场强度、磁场强度等矢量的类比学习有着至关重要的作用。[1]然而,在该实验中学生通过教材中的传统实验方案探究所得的实验结果却不尽如人意,存在误差比较大或实验结果说服力不够强等不足。本文的创新实验设计就实验误差进行分析,并通过利用自制教具等设计相应的创新实验方案,低误差完成实验目的的同时,促进了学生对矢量运算法则的深度理解。
一、实验改进的背景
“验证力的平行四边形定则”传统实验方案得出的实验结果在实验说服力和理论、实际数据的吻合度上均并不理想。
图1 的演示实验方案存在的不足是定滑轮两侧所挂的钩码数只能去一些特殊组合,图2 的实验演示方案同样也要求每条细绳下所挂钩码的个数只能取例如3 个、4 个、5 个钩码等特殊组合。以上两种方案中的实验装置在挂钩码时都不具备任意性,无法随意改变力的大小和方向,从而导致学生对平行四边形定则成立的普遍适用性产生很大质疑,甚至还会认为实验结果都是巧合,造成实验结果的说服力不强。
图3 是教材中的传统学生分组实验方案,由于弹簧测力计精度较低(分度值为0.1N)、学生读取弹力的大小、描点确定力的方向、画力的图示、作力的平行四边形、标度选择不合适、两个力的夹角大小选择等诸多方面的都存在误差,导致大多数学生通过探究得出的实验结果不尽理想,误差较大,说服力不强,很难达到验证力的平行四边形定则成立的目的。
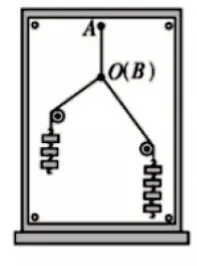
图1

图2
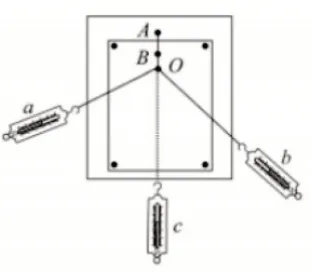
图3
二、创新实验方案的设计
(一)实验目的
验证力的平行四边形定则
(二)实验原理
根据平行四边形定则:两个矢量合成时,以表示这两个矢量的有向线段为邻边作平行四边形,这两个邻边之间的对角线就代表合矢量的大小和方向[2]。
(三)实验器材

(四)实验改进的创新点
1.调整器材使力传感器引出的挂钩轴(如图4)

图4 创新实验装置
心沿细绳指向量角器的圆心,两条尼龙钓鱼线(细绳)的结点在力矩盘上的投影与圆心重合,从而保证细绳拉力的方向与量角器的刻度线重合,且刻度线对应的刻度大小即为拉力与竖直方向的角度大小;
2.自制分度为1°的量角器固定在铁架台上
同时采用线径很小(0.12mm)的尼龙钓鱼线代替细绳,使得力方向与竖直方向所成角度的测量精度大大提高;
3.用分度为0.01N 的力传感器代替分度为0.1N 的弹簧秤,大大提高了力大小的测量精确度;
4.利用力传感器和数据采集器组合替代弹簧测力计的读数,避免了弹簧测力计精确度低、读数偶然误差等不足;
5.利用SWR 数字化信息系统将数据采集器采集到的力的大小、方向数据直接电子化自动生成平行四边形定则下的合力,避免学生画力的图示、作平行四边形等带来的较大误差,让实验结果更具说服力。
(五)实验探究步骤
1.按实验装置图搭建实验平台(如图4);
2.用原点调节挂件,配合面板中部位置的弧形孔内的螺栓,使0 刻度线和原点在竖直一条线上;
3.打开SWR 数字信息系统,进入“力的合成与分解”模板;
4.对实验面板上的两个力传感器空置后校准,在原点调节挂件的龙虾扣上挂上相同的钩码,转动调节螺母使圆环中心和半圆板中心重合;
5.选择“合成”并点击“两个力”按钮;
6.目测半圆板,分别读出左侧力F1 和右侧F2 与竖直方向的夹角θ1、θ2,在与F1 对应的角度数据栏里键入θ1 的数值(正值),在与F2 对应的角度数据栏里键入θ2 的数值(负值),点击合成,就会出现F1、F2 的合力与角度的大小;
7.使用一个力传感器空置,点击“校准”按钮对力传感器进行
8.校准,在力传感器上挂上钩码,点击“一个力”测得合力F 的大小,点击“画图”;
9.增加或减少钩码的数量,操作后得到多组数据;
10.根据力传感器与钩码竖直方向的角度和读数,分析力的合成规律。
(六)实验结果
根据图5、图6 实验数据显示,合力的理论值大小为1.96N,方向:与竖直方向的夹角为0.00°,即:竖直向上;合力的测量值大小为1.96N,方向:与竖直方向的夹角为0.00°,即:竖直向上;很明显合力的理论值和测量值在大小和方向上均完全一致,因此可以得出以下实验结论:在误差允许的范围内,力的平行四边形定则成立;
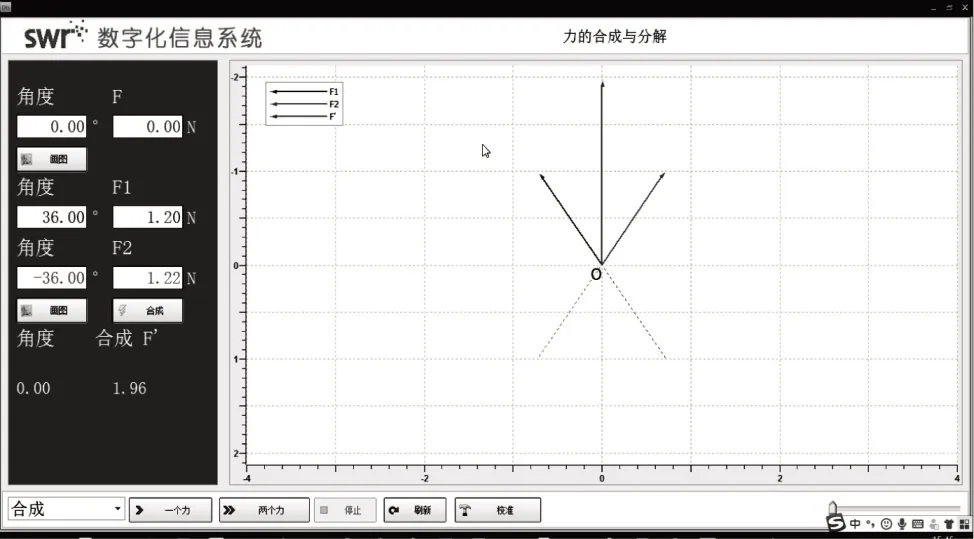
图5 合力的理论值图示
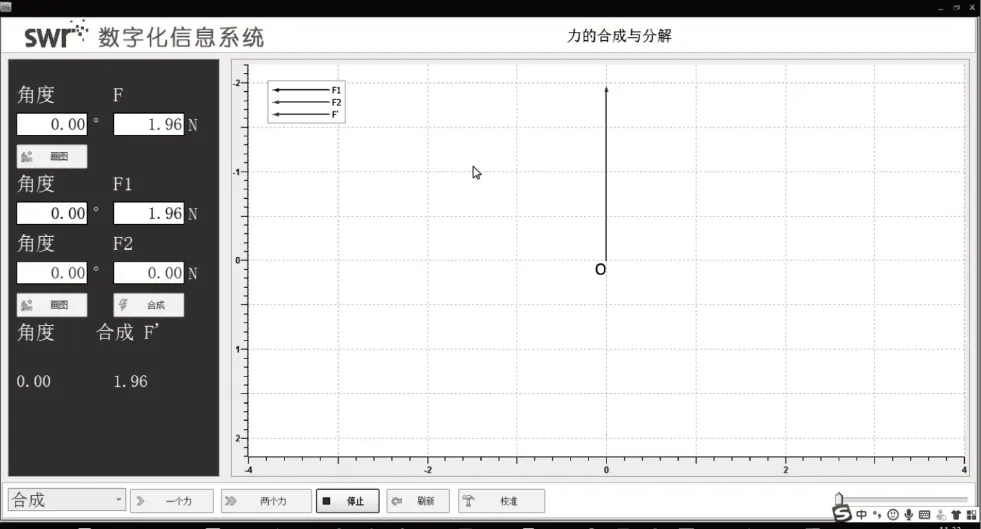
图6 合力的实际值图示
(七)实验效果评价
1.本实验通过对细绳、量角器等自制教具的改进、力传感器利用、数据采集器、SWR 数字化信息系统软件实现信息化作图两种创新手段相结合的方式,所带来的实验数据精确度上的优化使得实验效果相比传统实验有了大幅度的提升,实验测得的合力和理论合力在大小、方向上大小完全一致,所得的结果令人信服,完美地验证了力的平行四边形定则。
2.通过创新实验让学生更加确定力的平行四边形定则的科学性的同时,提升学生科学探究素养、必备品格和价值观念。
(八)本创新实验方案在学生探究实验中的应用
1.应用课时:《验证平行四边形定则学生分组实验探究课》。
2.实验地点:物理探究室。
3.实验器材(传统实验器材):弹簧测力计、钩码、轻质小圆环、细线、直角尺、量角器、定滑轮、长方形钕磁铁、木板、小白板、铁架台、图钉、画图纸等。
4.探究实验课设计:
(1)学生选择性挑选几种器材分组讨论设计实验方案验证力的平行四边形定则;
(2)学生上台演示并讲解实验方案,除图1、图2、图3 方案外,学生也提出了创新方案,如图7、图8。
图7 展示的学生创新方案1 是用四个图钉将画图纸固定在木板上,将木板竖直固定在铁架台上,用两根弹簧测力计平行于木板互成角度拉钩码,让其处于静止的平衡状态,通过读取弹力的大小、描点确定力的方向,并按照力的平行四边形定画出两个弹力的合力,接着用一根弹簧测力计拉钩码处于静止的平衡状态,画出钩码的重力,最后比较合力和重力的大小和方向。
图8 展示的学生创新方案2 是利用量角器在纸张上同一点画出互成120°的三条直线,并将三根弹簧测力分别沿三条直线方向拉轻质小圆环,并使其在该点上处于静止的平衡状态,这个时候可以发现三根弹簧测力计的示数相等,根据两个互成120°且大小相等的力合成,合力的大小和其中任何一个分力大小相等,方向在两个分力的角平分线上,很容易得出处于三力平衡状态下的物体F合=0N的结论。
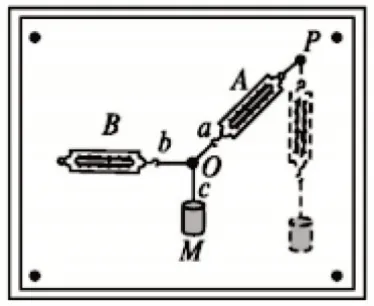
图7 学生创新方案1

图8 学生创新方案2
(3)学生分组讨论各方案的优点和不足,并针对各个方案进行评价,得出:图1、图2、图7 方案的结论具有普遍适用性,但误差较大,图3、图8 方案误差小,但结论不具备普遍适用性;
(4)教师引导学生利用图4 所示中的力传感器、数据采集器、SWR 数字化信息系统、自制量角器、尼龙钓鱼线等创新器材共同开展实验探究,保证结论具有普遍适用性的同时,提升了合力理论值和实际值的吻合度,最大程度地降低了误差。(具体详细操作和实验作图结果参照5、6 点)
综上,通过上述利用力传感器、数据采集器、SWR数字化信息系统、自制量角器、尼龙、钓鱼线等自制、创新器材在“验证力的平行四边形定则”实验探究课中的应用,所得的实验结果与传统实验方案、学生设计的方案形成鲜明对比,提高了学生获取、加工处理、交流和表达信息的能力,学生的语言表达能力以及归纳、推理、分析、综合、评价等深度思维能力得到培养,[3]同时让学生对“科学技术是第一生产力”有了更深刻的感受,并在心中点燃创新的火花。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
上海人大月刊(2022年4期)2022-04-14
初中生学习指导·提升版(2021年2期)2021-09-10
陕西画报(2021年1期)2021-04-22
人物画报(2020年33期)2020-03-14
当代工人(2019年11期)2019-07-10
幼儿教育·父母孩子版(2017年4期)2017-06-13
中学生数理化·八年级物理人教版(2017年1期)2017-03-25
学苑创造·B版(2015年11期)2016-01-13
新少年(2015年6期)2015-06-16
