载人月球极地探测定点返回轨道设计
2020-11-30 07:24陆林李海阳刘将辉杨路易
中国空间科学技术 2020年5期
陆林,李海阳,刘将辉,杨路易
国防科技大学 空天科学学院,长沙 410073
月球是人类探测太空奥秘的首选目标,也是人类为扩大生存空间进入深空最合适的中转站,所以人类也在不断努力探索各种方式登陆月球[1-2]。随着嫦娥四号任务的圆满成功,越来越多的人憧憬中国载人登月梦想能够尽早实现。早期美国Apollo任务的着陆区主要集中在赤道附近,但由于月球上水冰的发现[3-4],人类对月球极地区域和其他高纬着陆区域的关注度不断增加,将其作为下一步月球探测的热点区域[5-6]。而载人月球极地探测轨道的优化设计对载人月球极地探测任务的成败具有重要作用。
目前关于载人登月地月转移段的轨道设计已经比较成熟[7-10],而针对月地返回轨道的研究相对较少。Wooster[11]针对任意时刻返回,提出了三种月地轨道射入的变轨方案,比较了不同方案消耗的速度增量与异面差的关系,但没有对这些方案进行优化设计。Ocampo等[12]在二体轨道模型下,对月地返回问题展开了研究,但没有对高精度解进行求解。Jones等[13]利用非线性规划算法优化求解了不同机动方案的月球逃逸轨道,并做了对比,但只是对月球影响球内部的轨道进行了研究。Gavrikova等[14]结合三体问题模型,运用Lambert算法求解了航天器在环月飞行阶段的返回问题,但脉冲消耗较大,优化效果不明显。陈海朋等[15]给出了极地区、非极地区月面返回最小轨道面调整角度计算方法及整个任务期间任意时刻返回上升轨道与目标轨道最大平面夹角最小化的条件。汪中生等[16]基于单脉冲变轨的月地返回轨道方案,进一步设计了两次变轨方案的优化算法流程,并对不同方案进行了讨论,但只适合月球探测器采样返回任务。Feng等[17]提出了一种月球南极探测返回窗口的三级搜索算法,并采用改进的多圆锥截线法求解了初始轨道,但没有约束转移时间并且搜索效率不高。
对于从月球返回的载人飞船而言,能够返回预定的着陆区,对载人飞船的回收和营救航天员至关重要。因此,定点返回轨道的设计是载人月球极地探测任务中必须解决的关键问题,但目前对定点返回轨道的研究不多。Shen等[18]采用MultiStart算法对单脉冲定点返回轨道进行了优化求解,但搜索近乎遍历,效率不高。贺波勇等[19]对着陆窗口与定点返回轨道进行了耦合设计,但循环遍历求解的效率不高。
由此可以看出,现有研究主要存在三方面需要提高的地方:1)很多学者假定瞄准地球终端状态的双曲剩余速度矢量已知,仅仅优化求解了月心段返回轨道;2)大部分月地返回轨道的研究仅考虑了再入走廊约束,无法保证载人飞船返回预定着陆场;3)现有的定点返回轨道研究均是针对传统切向单脉冲的情况开展的,并不适合月球极地探测返回任务。因此,本文针对以上不足,对完整的载人月球极地探测多脉冲定点返回轨道进行了优化设计。首先,从月球极地轨道的特性出发,介绍了三种返回轨道机动方案。然后,采用串行求解策略对三脉冲变轨定点返回轨道进行了优化设计。在基于近月点伪参数的三段二体拼接模型下,计算轨道初值;精确计算时,采用逆向和正向高精度数值积分方法进行两段轨道拼接。通过仿真测试,验证了该策略的有效性和精确性。最后,利用该方法进行大量仿真计算,分析了轨道的速度增量特性。研究结论对未来载人月球极地探测定点返回轨道方案的设计具有重要的借鉴作用。
1 极地探测返回轨道机动方案
当环月轨道为月球极地轨道(lunar polar orbit, LPO)时,其特性与一般的环月轨道不同,从月球极地轨道出发返回地球对返回能力的要求较高。当极地轨道面与月地连线方向垂直时,无法有效借助月球公转速度进行返回,即难以采用单脉冲返回轨道方案。因此,月球极地轨道的特性不能保证低冲量、单脉冲返回解的存在性,需要进行异面变轨。针对这种情况,从理论层面介绍以下三种月球极地轨道出发返回地球的轨道机动方案。
1.1 两脉冲返回轨道机动方案
两脉冲返回轨道机动方案的过程为:首先,在月球极地轨道施加第一次脉冲,离开月球,然后在到达月球影响球处时施加第二次脉冲,进行轨道面的调整,进入月球逃逸轨道返回地球。两脉冲返回轨道机动方案示意如图1所示。
由于用于调整轨道面的第二次脉冲在月球影响球边界处施加,因此能够实现以较小的脉冲调整至月球逃逸轨道。
1.2 三脉冲返回轨道机动方案
三脉冲返回轨道机动方案的过程为:首先,在月球极地轨道施加第一次脉冲进入大椭圆过渡轨道,施加第一次脉冲处同时也是大椭圆过渡轨道的近月点;然后,在大椭圆过渡轨道的远月点施加第二次脉冲,进行轨道面的调整;最后,在大椭圆过渡轨道的近月点施加第三次脉冲进入月球逃逸轨道返回地球。三脉冲返回轨道机动方案示意如图2所示。
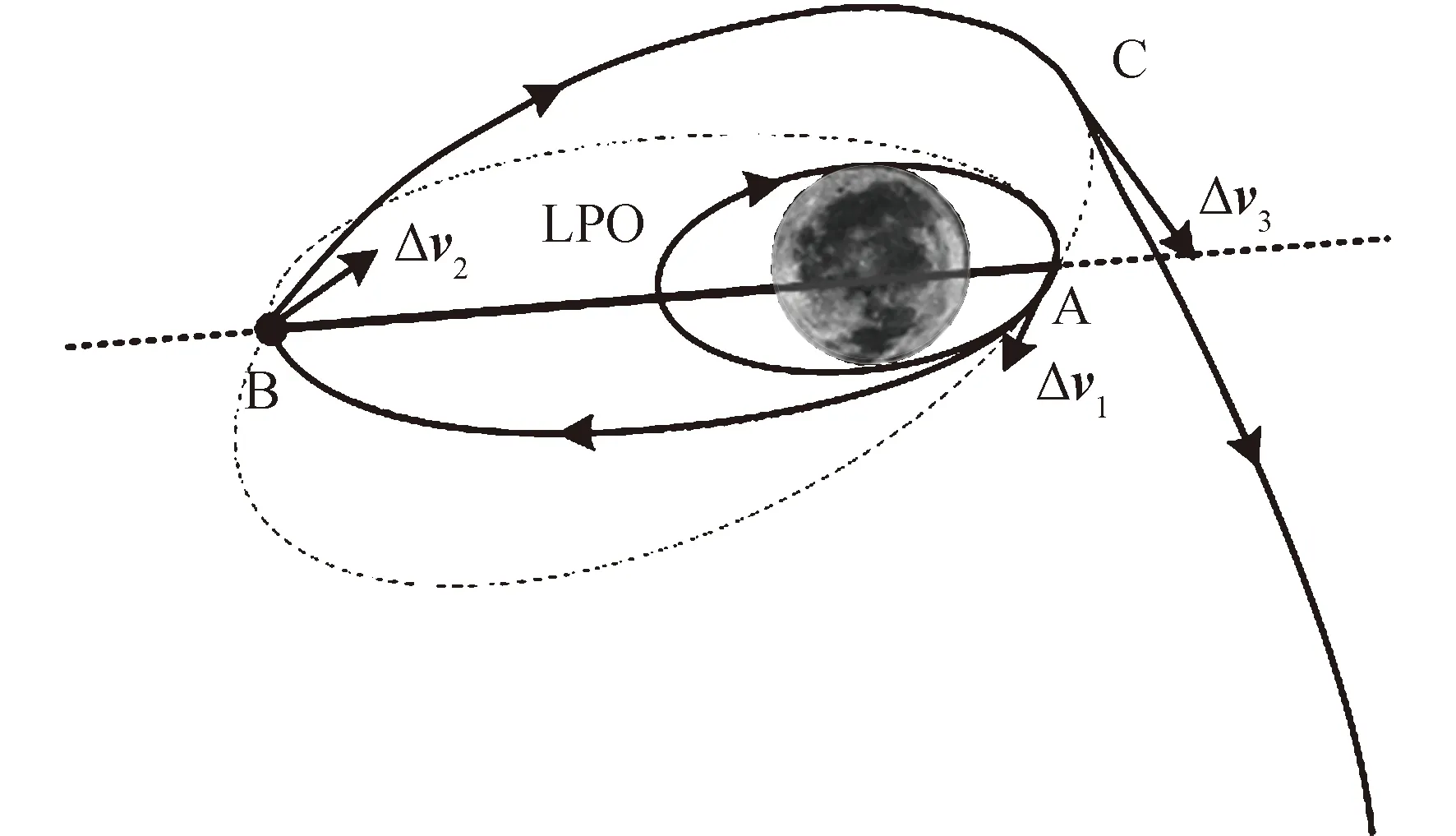
图2 三脉冲返回轨道机动方案示意Fig.2 Return orbit scheme of three-impulse maneuver
由于在大椭圆轨道的远月点进行轨道面调整,因此异面变轨需要的脉冲较小。
1.3 四脉冲返回轨道机动方案
在三脉冲返回轨道机动方案的基础上,提出一种四脉冲返回轨道机动方案,即在施加第2次脉冲调整轨道面时,不用完全调整到位,而是在载人飞船到达月球影响球边界时再施加第4次脉冲,将轨道面完全调整好,从而进入月球逃逸轨道返回地球。四脉冲返回轨道机动方案示意如图3所示。
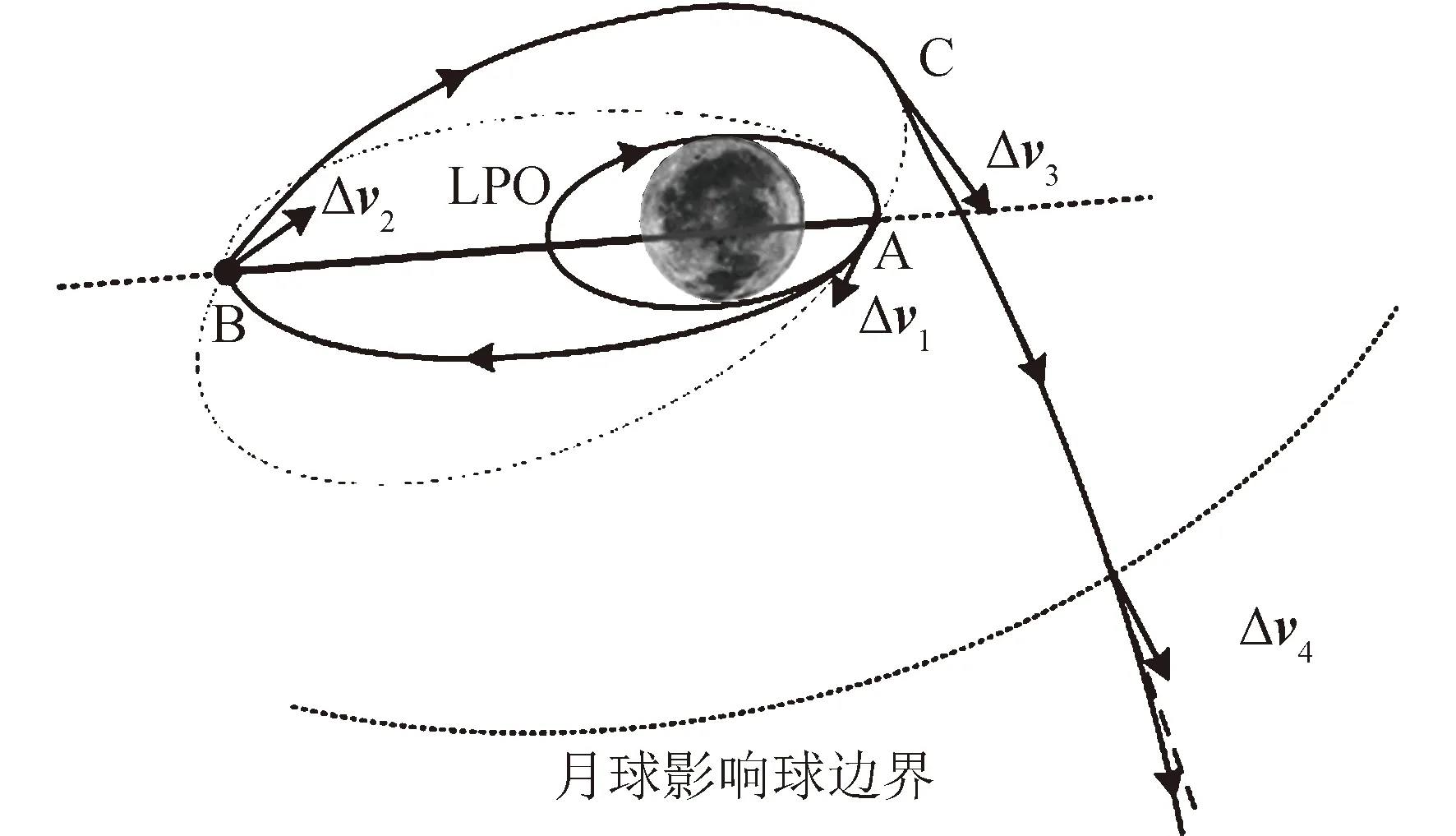
图3 四脉冲返回轨道机动方案示意Fig.3 Return orbit scheme of four-impulse maneuver
四脉冲返回轨道机动方案通过施加第2次和第4次脉冲,可以实现较低能量代价的异面变轨。
2 返回轨道设计方法
第1节提出的三种返回轨道机动方案中,与三脉冲返回轨道机动方案相比,四脉冲返回轨道机动方案在大部分情况下并不会节省燃料,工程上实现较为复杂;两脉冲返回轨道机动方案属于极限情况,在这里不展开深入分析。从工程应用层面考虑,下文主要针对三脉冲返回轨道机动方案,利用数值方法对载人月球极地探测定点返回轨道进行设计与分析。
2.1 约束条件
与无人探月任务相比,载人月球探测任务在轨道设计方面的要求更为严格,所以载人月球极地探测定点返回轨道的设计应该同时满足许多复杂的约束条件,包括工程和轨道两方面的约束。工程方面的约束主要是飞行时间约束,载人月球极地探测任务为确保航天员的生命安全,通常限制月地返回时间T不能太长,所以轨道设计需要满足:
T≤Tmax
(1)
式中:Tmax为月地返回所能允许的最长飞行时间。
轨道方面的约束主要包括极地轨道约束和终端轨道约束,载人月球极地探测定点返回轨道设计需满足:
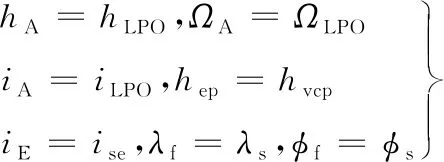
(2)
式中:hLPO、ΩLPO、iLPO分别为初始月球极地轨道的轨道高度、升交点赤经和轨道倾角;hvcp为真空近地点高度,可以等效为再入角和再入点地心距[20];ise为返回轨道倾角;λs、φs分别为再入点的经度和纬度。
2.2 返回轨道初步设计
返回轨道初步设计阶段,提出一种基于近月点伪参数的三段二体拼接模型,模型示意如图4所示,以月球逃逸轨道的近月点时刻tprl和出月球影响球时刻tout将定点返回轨道分为三段二体轨道拼接计算。三段二体轨道分别指:月球极地轨道经过三脉冲机动至月球逃逸轨道近月点、月球逃逸轨道近月点至月球影响球出口点和月球影响球出口点至大气层再入点。选取近月点伪经度λprl、近月点伪纬度φprl、近月点速度倾角iprl和近月点轨道偏心率eprl作为设计变量[21],当给定近月点时刻tprl和近月点高度hprl时,可由近月点伪参数(λprl,φprl,iprl,eprl)确定一条三脉冲定点返回轨道。其中,第一段轨道采用逆向求解方法,第二、三段轨道采用正向二体拼接方法,分别进行计算。
2.2.1 逆向求解方法
令第二次变轨后的LIO2轨道周期与三脉冲机动总时长T1的比例为α,则LIO2轨道半长轴为:
(3)
式中:μm为月球引力常数。LIO2轨道偏心率为:
(4)
式中:rc为近月距。则第三次脉冲矢量为:

(5)
式中:h2为LIO2轨道面的法向单位矢量。
LIO2和LPO存在两条交线,选取距LIO2远月点较近的交线,将LIO2在交线处的B点作为第二次脉冲施加的位置,B点同时也是第二次变轨前的LIO1的远月点,因此可以得到LIO2上B点的轨道根数,进而得到位置矢量rL2和速度矢量vL2。第二次变轨的脉冲包括用于改变异面差的脉冲Δv21和用于面内变轨的脉冲Δv22,在第二次变轨前后的水平航迹角为:

(6)
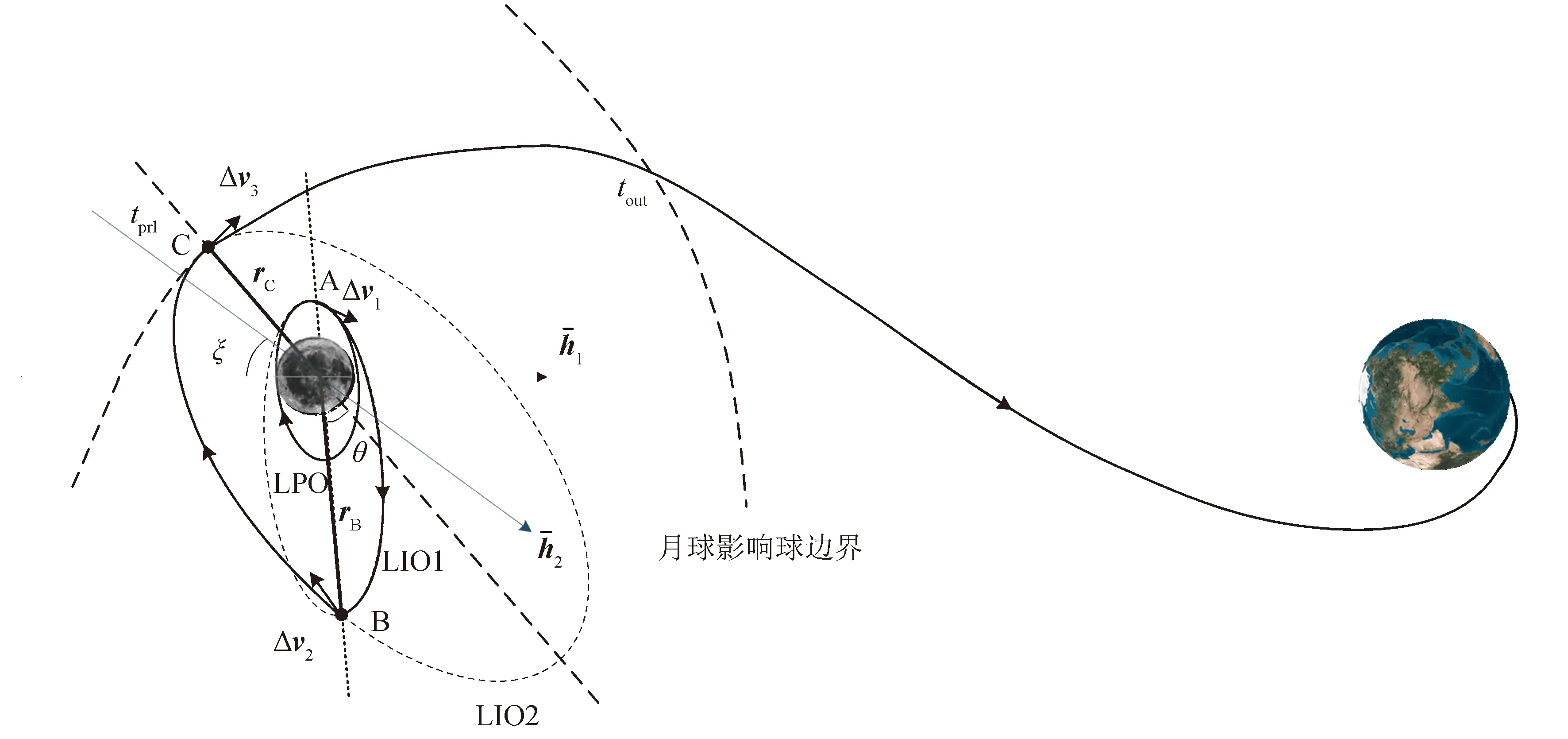
图4 三段二体拼接模型示意Fig.4 Three-segment two-body patched model
式中:fL2为LIO2上B点的真近点角。改变的异面差为:
(7)
式中:ΩL2和iL2分别为LIO2的升交点赤经和轨道倾角;uL2为LIO2上B点的纬度幅角。
在LIO2月心LVLH坐标系中,用于改变异面差的脉冲矢量和用于面内变轨的脉冲矢量分别为:
(8)
Δv22=
(9)
式中:rA为LPO的轨道半径;vL2为LIO2上B点的速度。因此,第二次脉冲矢量为:
Δv2=Δv21+Δv22
(10)
由rL2、vL2和Δv2可以得到LIO1上B点的位置和速度矢量,进而得到轨道根数,则第一次脉冲矢量为:

(11)
式中:h1为LIO1轨道面的法向单位矢量。
2.2.2 正向二体拼接方法
第二段轨道的半长轴为:
(12)
式中:rm为月球半径。第二段轨道的近月点速度为:
(13)
当给定iprl时,近月点在月心LVLH坐标系中的位置和速度矢量分别为:
rprl=(hprl+rm,0,0)T
(14)
vprl=(0,vprlcosiprl,vprlsiniprl)T
(15)
当给定λprl、φprl时,近月点在月心LVLH坐标系下的位置和速度矢量分别为:

(16)

(17)
式中:M2和M3分别为绕Y轴和Z轴旋转的转换矩阵。
进而可以得到近月点在月心J2000坐标系下的位置和速度矢量分别为:

(18)

(19)
式中:Ωm、im、um分别为tprl时刻月球相对于地球的升交点赤经、轨道倾角和纬度幅角。M1为绕X轴旋转的转换矩阵。
第二段轨道的转移时长为:

(20)
式中:H为第二段轨道的双曲近点角,可以由第二段轨道在月球影响球处的真近点角fLSO求得:
(21)
因此,可以得到在月心J2000坐标系下,返回轨道在月球影响球出口处的位置和速度矢量。通过JPL星历可以求得月球在出月球影响球时刻的位置和速度矢量,从而可得到在地心J2000坐标系下,返回轨道在月球影响球处出口处的位置和速度矢量,进而转化为轨道根数,则从月球影响球到再入点的转移时间为:
(22)
式中:μe为地球引力常数;aSE为第三段轨道的半长轴;E为再入点的偏近点角,可以由真近点角fRE求得:

(23)
式中:eSE为地心段返回轨道的偏心率;真近点角fRE可以由下式计算得到:
fRE=
(24)
式中:rvcp、rSE分别为真空近地点和再入点的地心距。进而可以得到返回轨道在再入点的位置、速度矢量,然后可以转换成轨道根数,最终得到在再入点的经纬度。
第二段轨道采用升轨出发的方式,第三段轨道采用升轨到达的方式。采用SQP_Snopt优化算法进行求解,为了提高收敛速度,将等式约束设置为目标函数[22]:
JI=|i-ise|+σ|h-hvcp|+|λ-λs|+
|φ-φs|
(25)
式中:σ为相对权值因子,根据角度和距离单位,结合地球半径计算协调均衡;i、h、λ、φ分别为地心段返回轨道倾角、真空近地点高度、再入点经度、再入点纬度在迭代过程中的变化值。
2.3 返回轨道精确设计
2.3.1 高精度动力学模型
在地心J2000坐标系中,考虑各类摄动力,载人飞船的轨道动力学方程为:
AR+AD+AP
(26)
式中:R为载人飞船在地心J2000坐标系中的位置矢量;AN为N体引力摄动,这里只需考虑日月摄动,星体间相对位置可以通过DE405/LE405星历求解;ANSE为地球非球形摄动;ANSM为月球非球形摄动;AR为太阳光压摄动;AD为大气阻力摄动;AP为推力加速度。忽略木星、金星等大行星和地球潮汐的摄动,以及相对论效应等微小摄动量的影响。
2.3.2 两段轨道精确计算方法
在轨道精确计算中,载人月球极地探测定点返回轨道以月球逃逸轨道近月点为界分为两个部分,即三脉冲机动轨道和月球逃逸轨道,在高精度模型下分别进行逆向和正向积分计算,两段轨道精确计算均采用SQP_Snopt算法进行优化求解。其中,月球逃逸轨道部分,以轨道初步计算结果作为初值,代入高精度模型中直接进行求解,优化目标与约束条件设置与初步计算中保持一致。
三脉冲机动轨道部分,选取以下变量作为优化变量:第一次脉冲Δv1、第二次脉冲Δv2、第三次脉冲Δv3、前两次脉冲施加的时间间隔T11。经过高精度轨道模型反向外推,得到施加第一次脉冲处的轨道根数,约束条件为:
(27)
式中:iHP、ΩHP、eHP、hHP为高精度反向外推后得到的环月轨道倾角、升交点赤经、偏心率和轨道高度。
优化目标设置为三次脉冲之和最小:
J=|Δv1+Δv2+Δv3|min
(28)
3 仿真算例
根据上文提出的轨道设计方法,本节进行仿真测试,仿真算例参数设置为:载人飞船到达极地轨道时刻为2028年1月16日12:48:49,在月固系下,LPO升交点经度为130.38°,轨道高度为200 km,轨道倾角86.88°,偏心率为0;返回轨道倾角为43°,真空近地点高度为51 km,再入点经度为38.67°,再入点纬度为7.3°,最大飞行时间为5d。
根据上面设置的参数,利用本文的方法进行求解,得到初步计算和精确计算的轨道设计结果如表1所示,其中三次脉冲矢量均在月心J2000坐标系下表示。
由表1可以看出,初步计算与精确计算的结果比较接近。通过仿真可知,以初步计算结果作为精确计算的初值,能够使精确计算的过程快速收敛,并且两者的结果差异较小。在月心J2000坐标系中画出载人月球极地探测三脉冲机动定点返回精确轨道如图5所示。
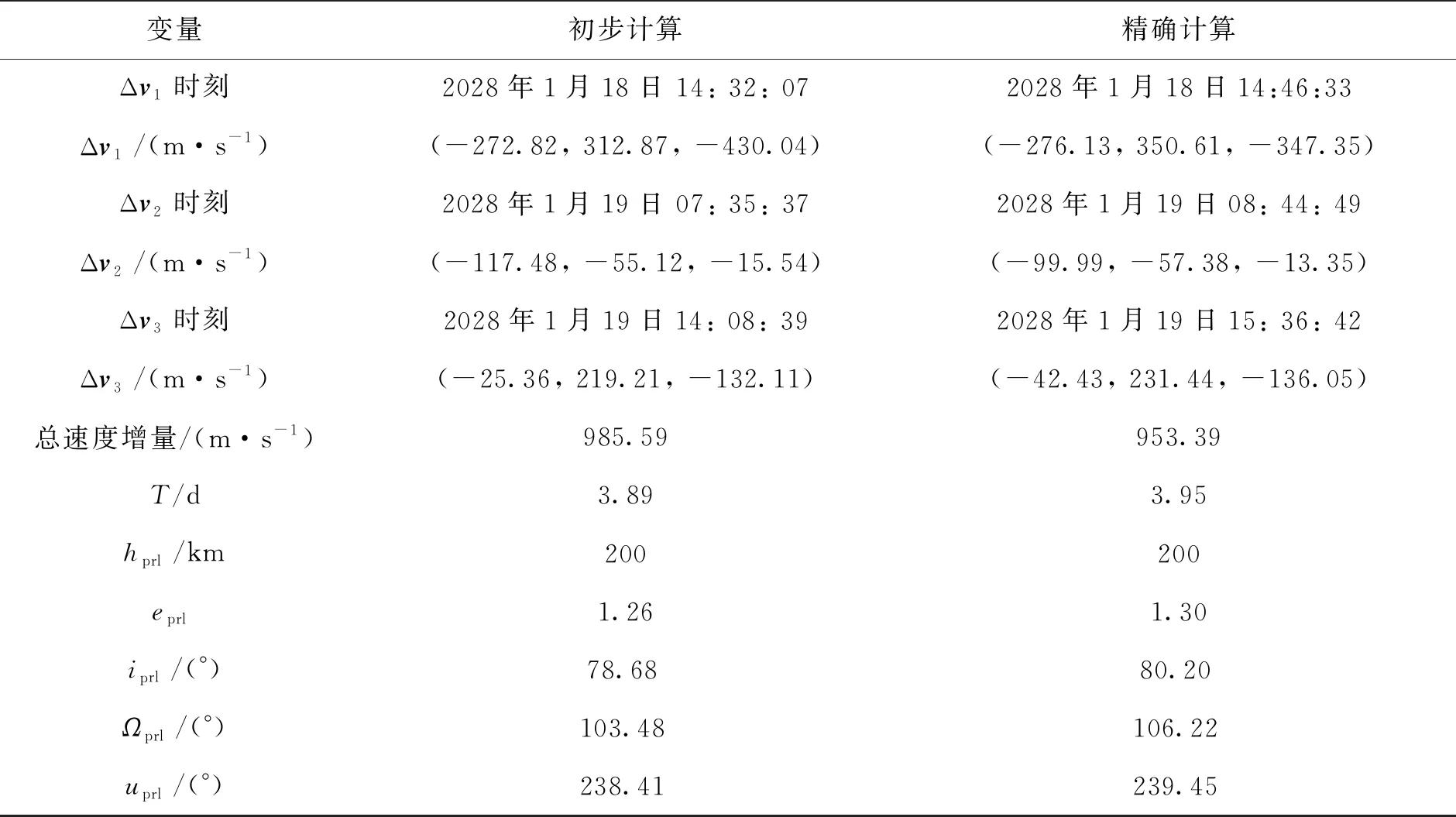
表1 轨道设计结果
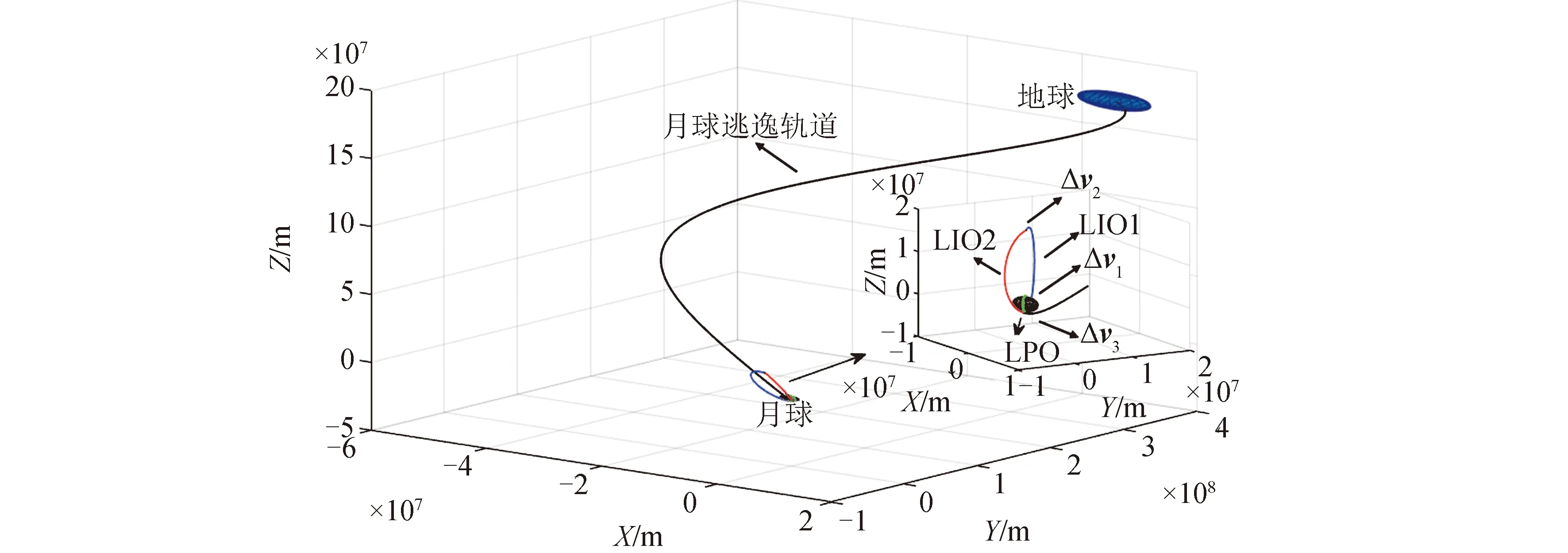
图5 定点返回轨道精确轨迹Fig.5 Accurate trajectory of point return orbit
4 轨道特性分析
在轨道方案设计阶段,工程上通常更加关注一类轨道的规律与特性,而对单条轨道的设计并不关心。由于上文提出的月球极地探测定点返回轨道优化设计策略具有精度高、收敛性好的优点,所以本节采用这一设计策略,根据大量的仿真计算,对轨道的速度增量特性进行分析。
4.1 月心J2000坐标系中升交点赤经变化的影响
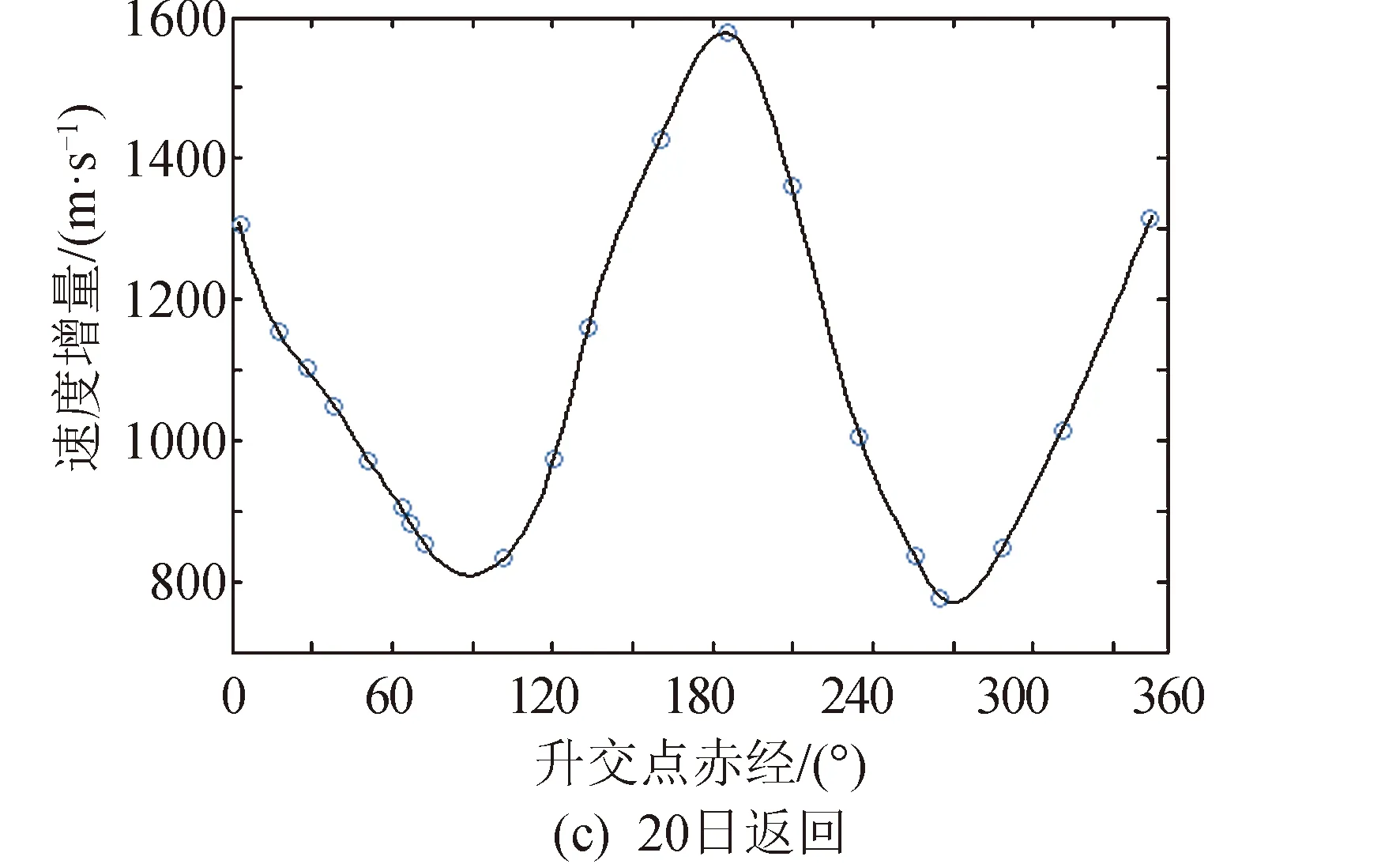
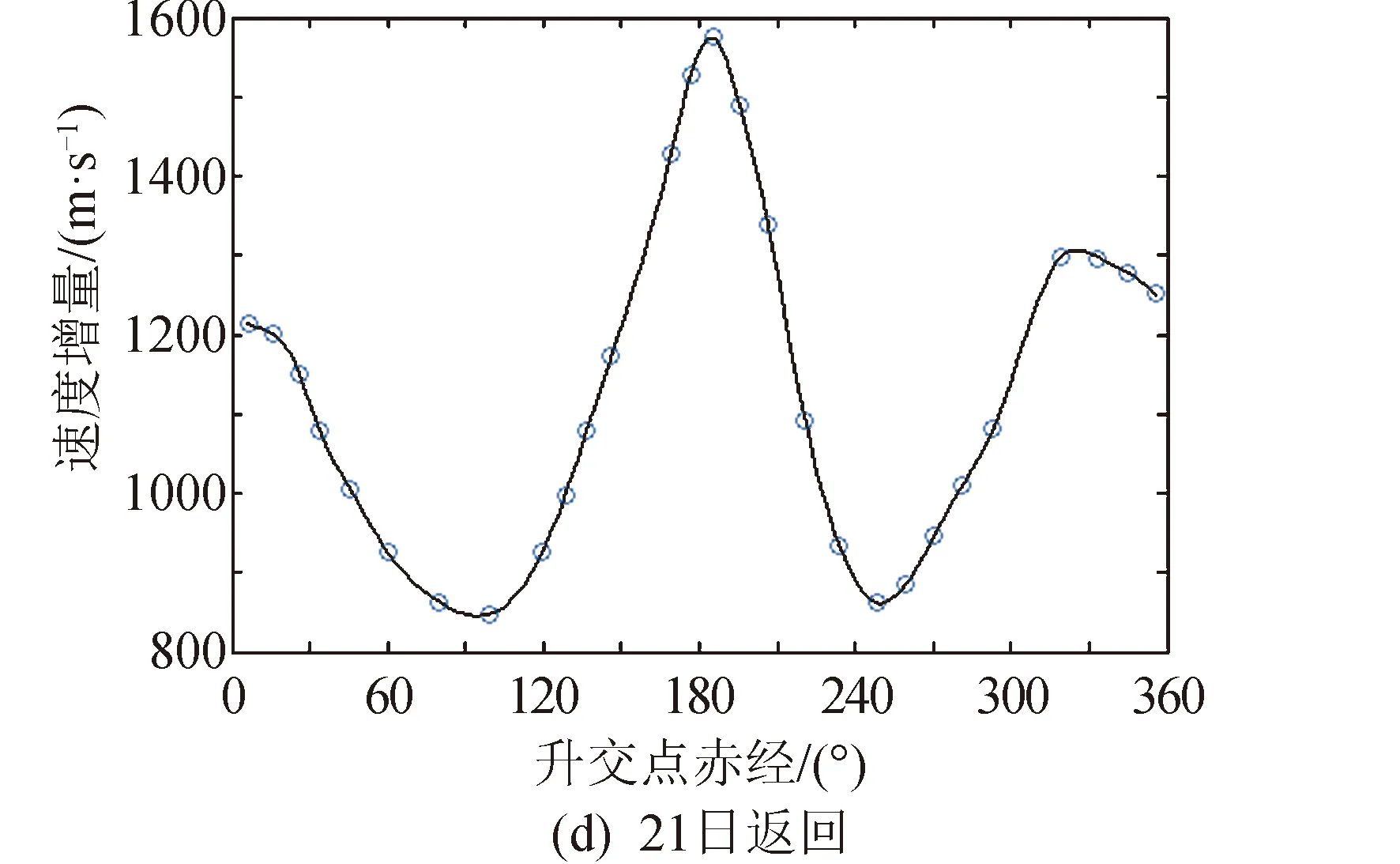
分析月心J2000坐标系中升交点赤经的变化对速度增量的影响,其他参数设置不变,仅仅改变LPO在月惯系中的升交点赤经,计算所需的速度增量,得到2028年1月18日至21日返回时,每天的升交点赤经变化与所需速度增量的关系,如图6所示。
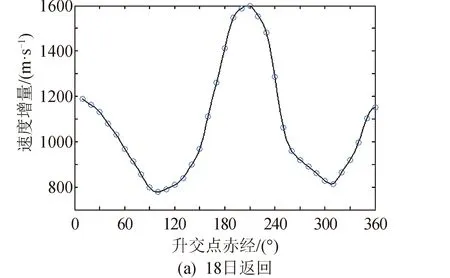
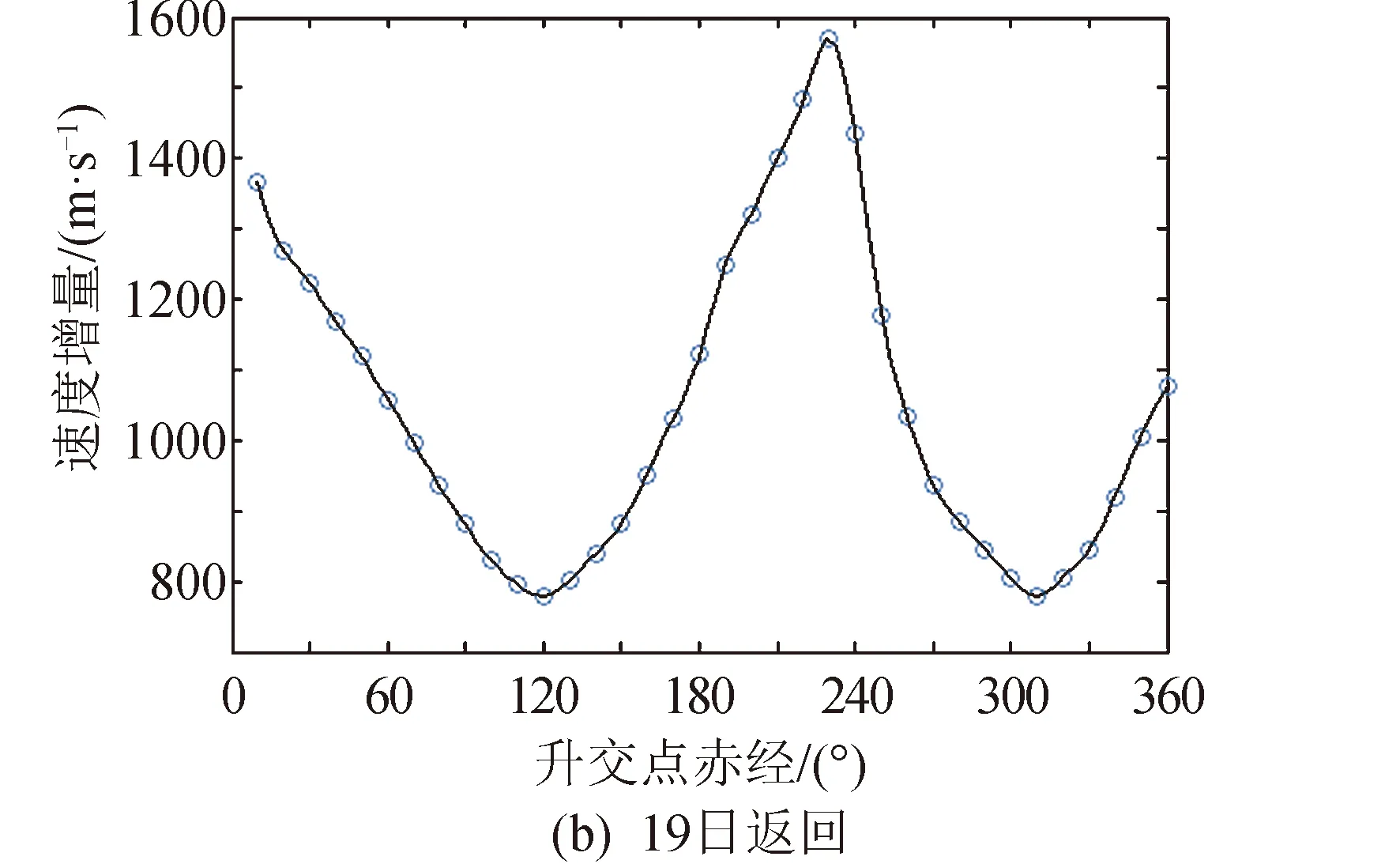
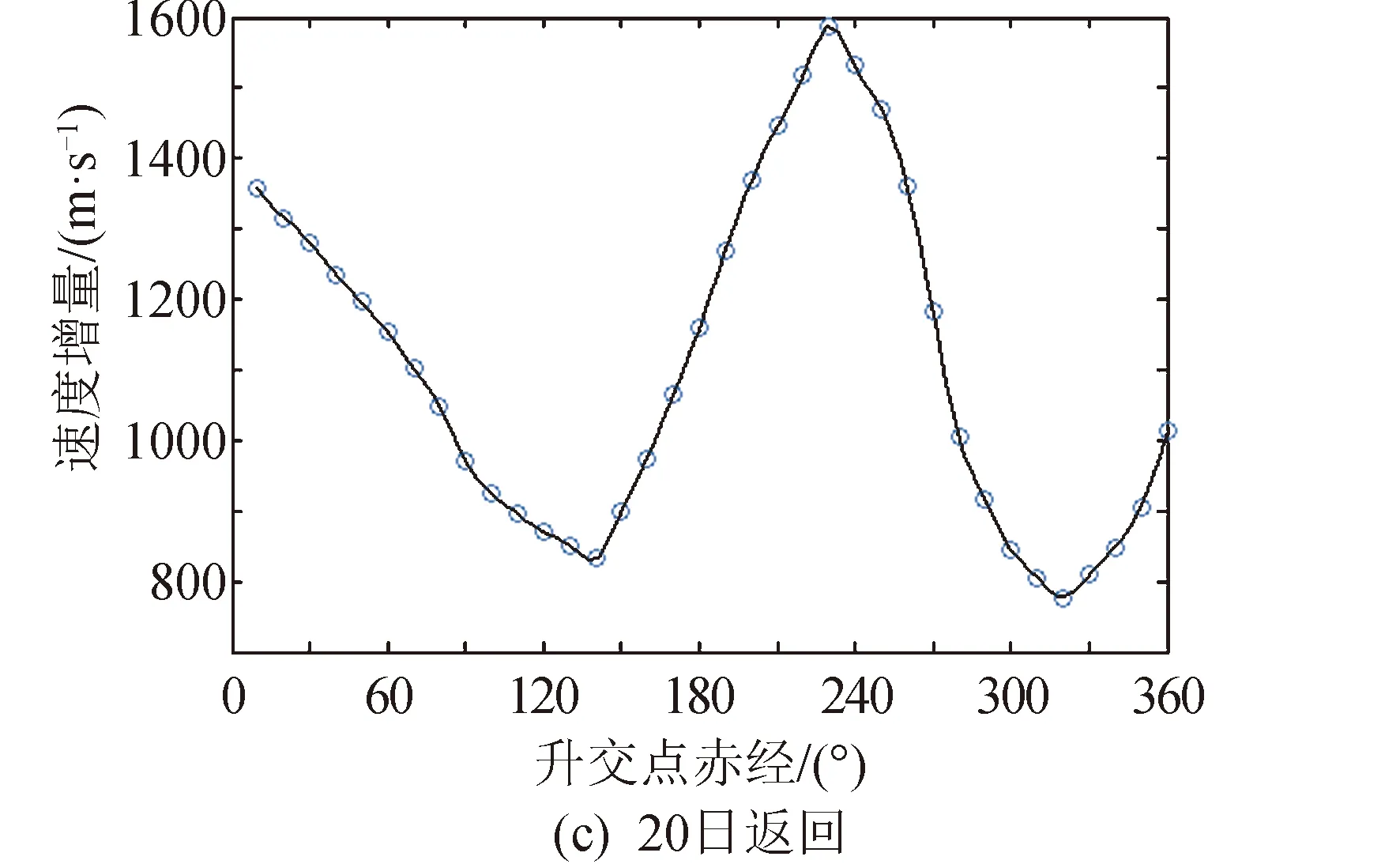
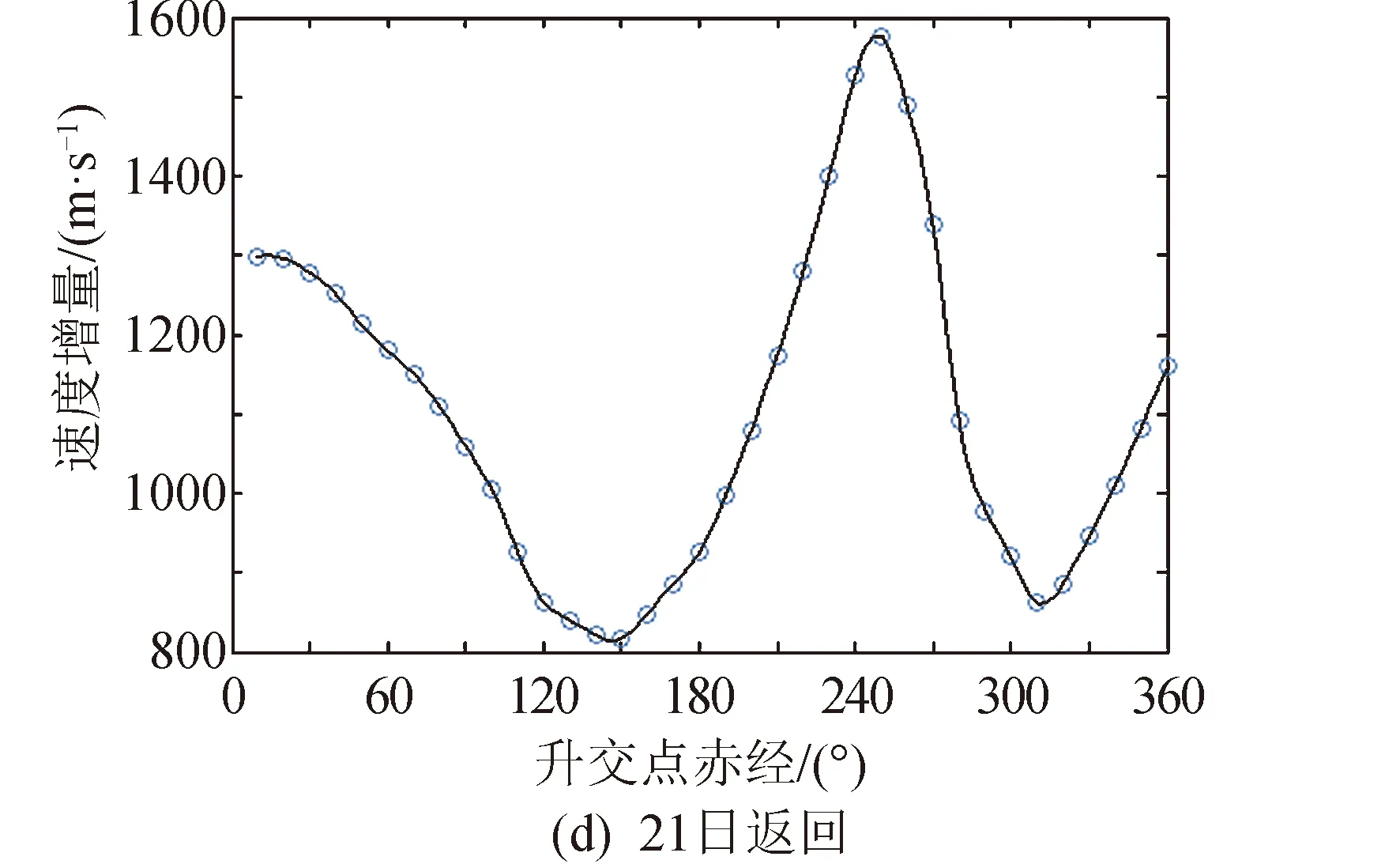
图6 2028年1月18~21日返回时不同升交点赤经与 速度增量的关系Fig.6 Relationship between right ascension of right ascending node and velocity increment when returning January 18th - 21st, 2028
由图6可以看出,不同日期返回时,LPO在月心J2000坐标系下的升交点赤经变化与速度增量关系图中,均有两个极大值和两个极小值,所需最小速度增量约为800 m/s,最大速度增量不超过1 600 m/s。
4.2 月固系中升交点经度变化的影响
分析月固系中升交点经度的变化对速度增量的影响,其他参数设置不变,仅仅改变LPO在月固系中的升交点经度,计算所需的速度增量,得到2028年1月18日至21日每天的升交点经度变化与所需速度增量的关系,如图7所示。
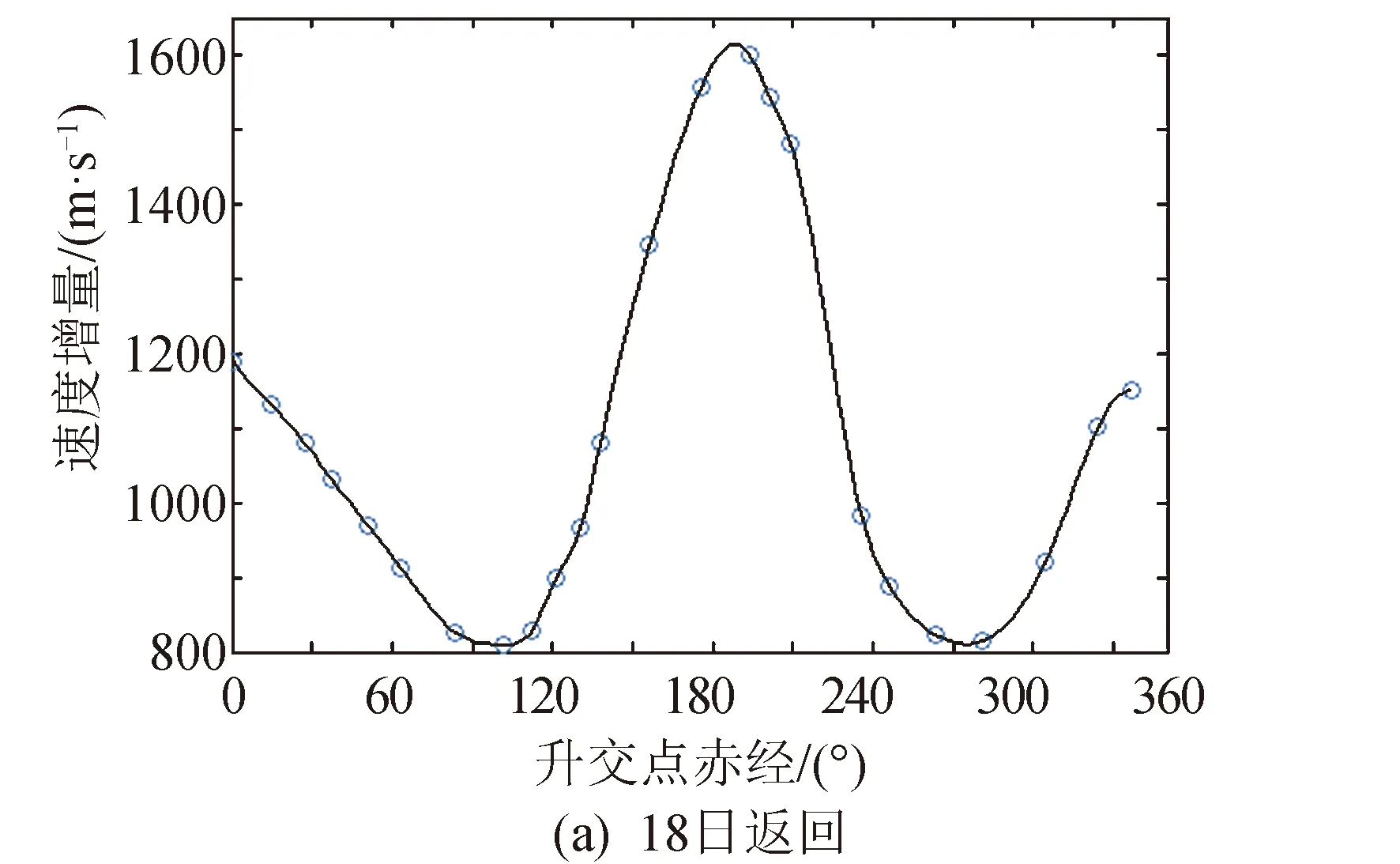
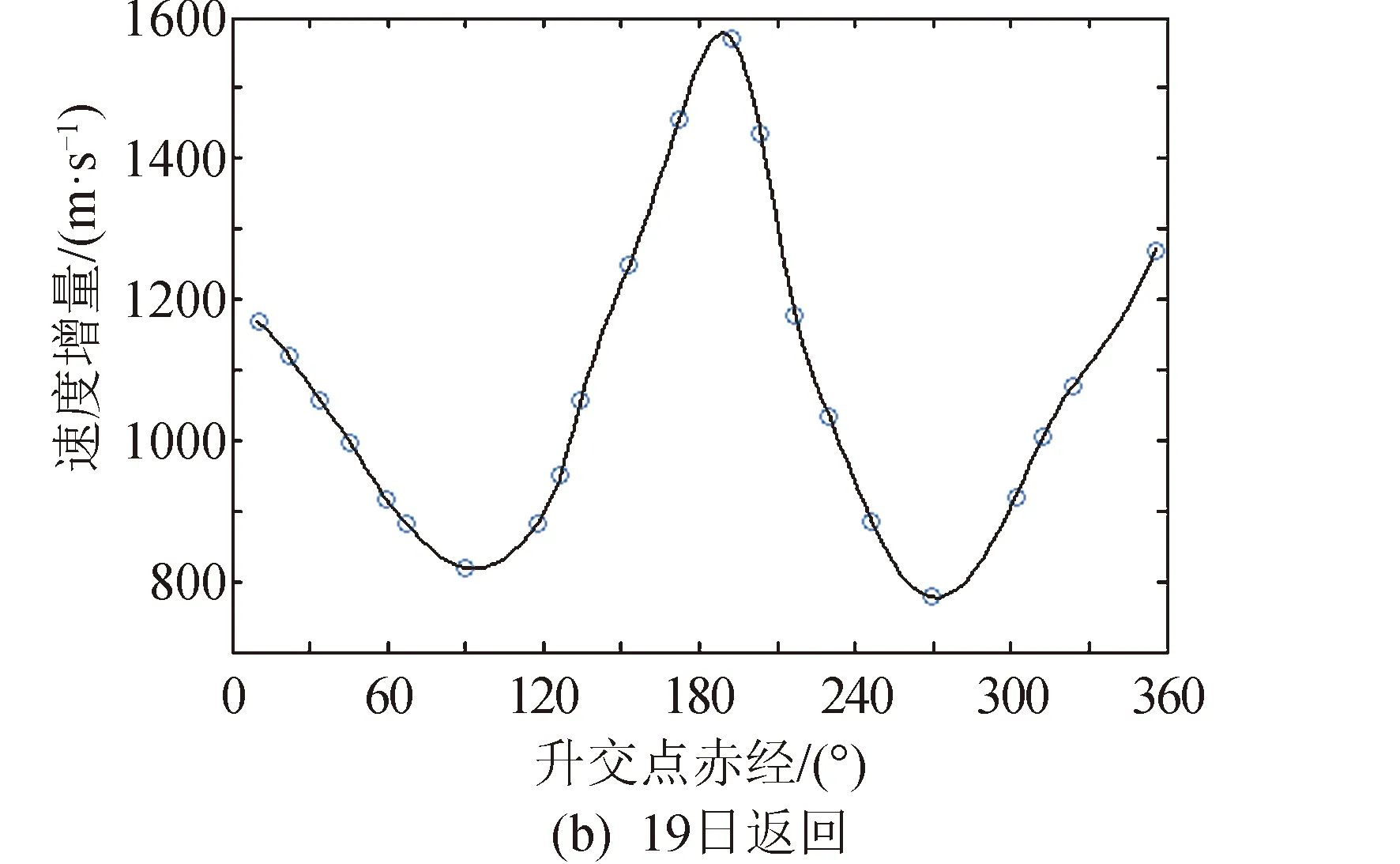
图7 2028年1月18~21日返回时不同升交点经度与 速度增量的关系Fig.7 Relationship between ascension of right ascending node and velocity increment when returning in January 18th-21st in 2028
由图7可以看出,不同日期返回时,LPO在月固系中的升交点经度变化与速度增量的关系图形状相似。在定点返回约束条件下,当升交点经度约为90°或270°时,所需的速度增量较低,约为800 m/s;当升交点经度约为0°或360°时,所需的速度增量较高,最大速度增量不超过1 600 m/s。由此可以看出,当LPO升交点与降交点连线与地月连线方向接近垂直时,速度增量消耗较小,可以作为最优出发位置,而当LPO升交点与降交点连线与地月连线方向接近时,速度增量消耗较大。上述变化规律与文献[23]采用间接法得到的结果一致,但由于本文考虑了定点返回的约束,消耗的速度增量相对大一点。
续图7Fig.7 Continued
4.3 飞行时间变化的影响
以升交点经度为111.25°的初始LPO,18日返回为例,分析飞行时间对速度增量的影响。图8给出了速度增量与飞行时间的关系,从图中可以看出,随着飞行时间的增大,总速度增量不断减小。这一特性与文献[23]采用间接法得到的结论一致。
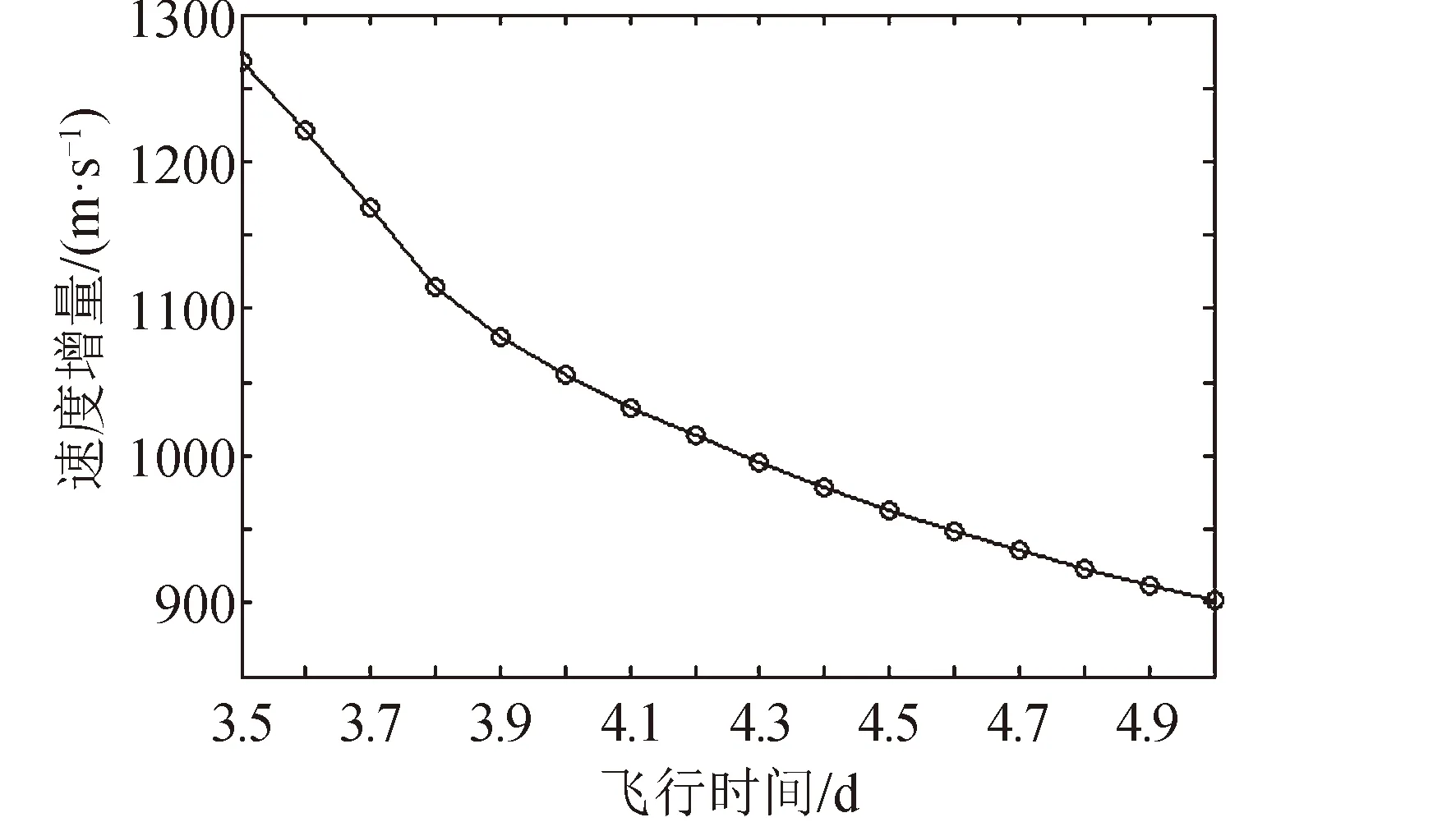
图8 飞行时间与速度增量的关系Fig.8 Relationship between flight time and velocity increment
4.4 返回轨道倾角变化的影响
以升交点经度为111.25°的初始LPO,18日返回为例,分析飞行时间对速度增量的影响。图9给出了不同地心返回轨道倾角对速度增量的影响,可以看出地心返回轨道倾角在43°~88°变化时,速度增量不断增大,但变化范围很小,不超过40 m/s。
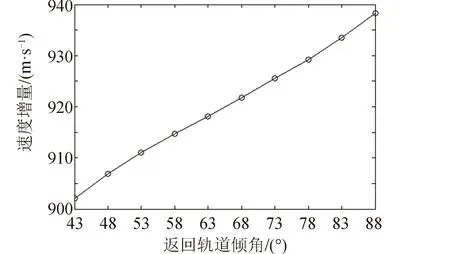
图9 返回轨道倾角与速度增量的关系Fig.9 Relationship between geocentric return orbit inclination and velocity increment
因此,从以上分析可看出,从不同升交点赤经的LPO返回时,速度增量在800 ~1 600 m/s之间变化。当LPO升交点与降交点连线与地月连线方向接近垂直时,速度增量消耗较小。在返回过程中,飞行时间越长,返回轨道倾角越小,速度增量消耗越小。
5 结束语
针对月球极地探测返回任务,本文对定点返回轨道优化设计问题开展了研究,并得到了相关结论。
1)基于月球极地轨道特性,介绍了两脉冲、三脉冲和四脉冲三种返回轨道机动方案;
2)采用从初步计算到精确计算的串行求解策略,可有效优化设计三脉冲机动定点返回轨道;
3)当LPO升交点与降交点连线与地月连线方向接近垂直时,速度增量消耗较小,可以作为最优出发位置;
4)随着飞行时间的增大,速度增量不断减小,而随着返回轨道倾角的增大,速度增量不断增大。
该结论可为未来载人月球极地探测返回轨道方案设计提供理论依据。
猜你喜欢
小哥白尼(趣味科学)(2022年5期)2022-08-15
奥秘(2022年6期)2022-07-02
考试与评价·高二版(2021年1期)2021-09-10
当代陕西(2019年12期)2019-07-12
学生导报·东方少年(2019年7期)2019-06-11
汉语世界(The World of Chinese)(2019年1期)2019-03-18
数学学习与研究(2017年11期)2017-06-20
小学阅读指南·低年级版(2017年1期)2017-03-13
青年时代(2017年3期)2017-02-17
理科考试研究·高中(2014年3期)2014-04-10