
空间飞行器抓捕非合作目标后的复合控制
2020-11-17 07:27贾金豆王陈亮郭克信
导航定位与授时 2020年6期
贾金豆,徐 博,王陈亮,郭克信
(1. 北京航空航天大学自动化科学与电气工程学院,北京 100083; 2. 哈尔滨工程大学自动化学院,哈尔滨 150000)
0 引言
随着近些年空间技术的不断发展,在低重力、高辐射、高温高压的太空环境中有越来越多的任务需要人类去完成,能够替代人类在太空自由行动的空间飞行器在世界各国得到了大力发展,例如日本的工程试验卫星-7(Engineering Test Satellite VII,ETS-VII)、欧洲的地球静止轨道服务车(Geostationary Service Vehicle,GSV)和服务于空间站的欧洲臂(European Robotic Arm,ERA)、美国的Ranger TFX空间飞行器等。我国起步较晚,在“八五”期间,一些研究所及高校进行了许多空间机器人基础项目研究,其中最具代表性的项目是舱外自由移动机器人(Extravehicular Mobile Robot,EMR)[1],属于一套能够执行行走及操作能力的舱外空间机器人系统。
自由空间飞行器由基座及搭载其上的空间机械臂组成,与地面飞行器的显著区别是其在微重力下运行且基体不固定,相当于增加了6个自由度[2]。当空间飞行器抓取非合作目标时,目标会对整个系统动量产生影响,如果控制不当,将使系统姿势发生改变,进而导致通信受到干扰、太阳能收集不稳定等恶劣后果。
空间飞行器抓捕目标的过程主要分为4个部分:接近、同步、消旋及稳定抓捕。当目标质量等参数未知时,抓捕后形成的组合体具有很大的稳定不确定性,本文即是针对组合体的稳定问题进行更深一步的探讨及研究。
稳定控制的前提是需要一个精确的动力学模型,以往研究空间动力学建模的方法较为统一。文献[3-5,11-12]介绍了目前现有的空间飞行器的动力学建模方法,较为统一的建模方法为拉格朗日建模,通过机械臂几何关系及角动量、线动量守恒,推导出末端速度、角速度与关节角度的运动学方程,再通过拉格朗日方程得到系统受到底座力/力矩、关节力矩、末端受力的动力学方程。
抓捕前,根据目标运行轨迹选定抓取位置,并调整机械臂末端到规定位置进行抓捕,文献[6-7]研究了抓捕前空间飞行器的轨迹及姿态规划问题。抓捕瞬间,机械臂末端会与目标发生碰撞,受到脉冲式的冲击力,对系统的动量产生影响;为减少脉冲力对系统角动量的影响,文献[3,5]在该方面做了详细研究。抓捕后,空间飞行器与非合作目标构成组合体,组合体稳定控制方法主要分为两类,一类是目标惯量和质量等参数已知或可以通过其他手段精确辨识,对于该类情况可通过反作用轮或其他方法吸收多余角动量。文献[2]运用了关节阻抗控制和关节函数参数化协调控制,通过协调飞轮和关节运动使系统角动量转移至飞轮,最终使组合体达到稳定。另一类是目标质量和惯量等参数未知,对于该类情况,目前主要通过设计自适应鲁棒控制算法或干扰观测器以实现组合体的稳定控制。文献[7]采用了系绳消除角动量的方法;文献[9]将系统动力学模型转换为线性回归矩阵,通过自适应控制原理设计更新律来估计未知参数;文献[4]在关节空间内实行自适应控制;文献[10]通过递归运动学方程对组合体进行建模,将基座视为一个虚拟关节,以基座姿态设置控制率,通过不断更新抓取后的角动量,运用动量守恒方法估计出不确定参数。在干扰观测器的应用方面,文献[16]将非合作目标引起的系统不确定性部分视为干扰,进而设计了非线性干扰观测器(Nonlinear Disturbance Observer,NDOB)来估计干扰并给予前馈补偿。
上述文献的自适应控制应用均以控制组合体达到稳态为最终目的,并没有分析并精确估计出非合作目标的真实参数,为后续稳定控制及其他任务提供便利,因此称这些方法为被动自适应控制;主动自适应控制则是精确估计出系统未知参数并给予后续应用。
本文针对空间自由飞行器系统,首先第1节基于传统拉格朗日法,在关节空间内建立动力学模型;第2节设计了自适应控制算法及基于干扰观测器的控制算法,并理论分析了二者的优缺点;第3节开创性地提出了一种结合自适应控制及干扰观测器的控制方法;第4节进行了仿真验证;最后在第5节进行了总结。
1 空间飞行器动力学模型
1.1 空间飞行器动力学模型
如图1所示,空间飞行器可以简化为被n个关节连接的n+1节刚体,将机械臂各关节编号1~n,用变量q=(q1,q2,…,qn)T表示各关节角度状态,基座命名为B,用mi和Ii表示第i节刚体的质量及惯量。基于空间飞行器运行的轨道建立惯性坐标系∑I;以基座质心为原点,建立基座坐标系∑B;分别用向量Ri和ri表示惯性坐标系∑I和基座坐标系∑B下第i节刚体的位置[11-12]。

图1 自由飞行空间飞行器Fig.1 Free flying spacecraft
变量ζ=[bx,by,bz,q0x,q0y,q0z,q1,…qn]T;bx、by、bz表示基座的位置;q0x、q0y、q0z表示基座的姿态;q1,…,qn表示关节1~n的关节角度。系统的总动能为
(1)
其中,M(ζ)为系统斜对称动能矩阵。因为空间飞行器工作在无重力环境下,假设系统内没有弹性构件,系统势能为0。运用拉格朗日方程动力学原则,得到飞行器动力学方程为

(2)

另外,空间动力学模型具有一些特性:
1)M(ζ)为正定对称矩阵,所以M(ζ)-1也为正定矩阵;

为了便于后续控制方法的分析及仿真验证,这里以平面二关节空间飞行器[14]为主进行动力学建模。
平面二关节飞行器对应的动力学模型为
(3)
其中,ζ=[bx,by,q0,q1,q2]T,M0、C0详细表达式可参考文献[14]。
1.2 组合体动力学模型
空间飞行器抓取非合作目标后,组合体的惯量参数都发生了改变。
(4)
如图2所示,当空间飞行器抓取非合作目标后,手端与目标硬接触,并保持相对静止。推导组合体动力学模型与空间飞行器类似,仅需将非合作目标与远离基座的机械臂视为一体m2e,等效看作质量和惯量参数改变后的机械臂。
m2e=m2+mel2e=2(m2l2/2+me(l2/2+le/2))/(m2+me)
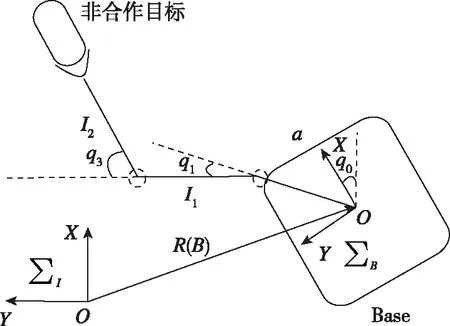
图2 组合体模型Fig.2 Combination
2 AC与NDOBC对比分析
本部分主要分析对比文献[9]与文献[16]中提到的自适应控制方法及基于干扰观测器的控制方法,为后续提出复合控制方法提供理论前提。
2.1 反馈线性化非线性控制
当空间飞行器抓取的目标参数已知,并且系统不存在模型不确定时[15],设计控制器为
(5)

将式(5)代入组合体模型式(4)中,可得系统偏差动力学方程为
由偏差动力学方程可知,随着t→0,复合偏差s→0,广义变量偏差e→0,系统最终能保持稳定。
2.2 AC设计
由于自适应设计过程是后续组合控制的关键部分,这里将给出具体设计过程。根据文献[9,13],将组合体动力学模型转换为线性回归矩阵形式

(6)
其中,θ=[a1,a2,a3,a4,a5,a6,a7,a8,a9,a10]T为组合体所有未知参数的表达式。记θ*表示组合体未知参数的真实值。
将式(6)代入式(5)中
(7)
因此,在自适应控制下,控制器为
(8)

(9)
其中,Γ为正定对角线矩阵。
2.3 自适应控制稳定性分析


(10)

将式(8)代入系统动力学模型式(4)中
(11)
用式(11)减去式(6),结合式(10)得

由动力学特性1),构造李雅普诺夫函数V
结合动力学特性2)及式(11)得
2.4 NDOBC设计
基于非线性干扰观测器控制的基本思路[13,16],设计非线性干扰观测器来估计系统存在的内外干扰及模型不确定性,并对估计出来的干扰值进行前馈补偿抵消。
变换组合体动力学模型如下
(12)

(13)
对式(13)设计干扰观测器如下
(14)

(15)
L=M-1c
(16)

最终结合反馈线性化非线性控制,控制器设计为
(17)
2.5 AC与NDOBC理论对比
AC和NDOBC的控制思路均是通过估计系统的不确定性部分以达到稳定,AC直接通过线性矩阵变化分析未知参数的具体结构θ=[a1,a2,a3,a4,a5,a6,a7,a8,a9,a10]T进行估计;NDOBC是将组合体的不确定性看作一个复合干扰d进行估计,无法反映出具体未知参数的真实值θ。
由式(9)可知,参数估计律与复合偏差具有耦合关系,会相互影响。当存在一定的偏差s,估计参数就会随之发生变动,由于最后必然存在系统稳态误差,参数估计值与真实值之间也必会存在一定误差,该误差量级与控制增益Γ的量级有关。
由Basic NDOBC[13]理论可知,在NDOBC中,d观测的精确率与d的变化速率有关,当其相对观测器更新速率较慢时,可以较为精确地估计出d。
3 AC与NDOBC复合控制
3.1 NDOB设计
基于上述分析,倘若可以结合AC与NDOBC各自的优点,即达到精确估计系统不确定参数的效果,则会给空间飞行器精确完成后续的控制任务带来极大便利。
已知在自适应控制下
(18)
构造一个虚拟干扰
(19)
直观上分析,式(19)反映了AC估计下的动力学模型与真实动力学模型的偏差,构造一个辅助动力学模型
(20)
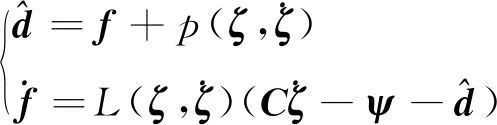
设计辅助动力学方程相应的观测器NDOB[14]为
(21)

(22)

(23)
(24)
式(21)、式(23)、式(24)给出了辅助动力学方程的干扰观测器表达式。
将系统动力学模型以及辅助动力学模型表示为线性回归矩阵的形式

(25)

(26)

(27)

(28)

整个复合控制系统的控制框图如图3所示。

图3 复合控制框图Fig.3 Diagram of composited control
3.2 NDOB稳定性分析

由ASSUMPTION,结合式(21)可以得到
(29)
构造李雅普诺夫函数
其中,I表示单位阵。

4 仿真验证
4.1 AC与NDOBC仿真对比
仿真初始化设置,初始位置及期望跟踪轨迹为:[1;1;0.02;0.05;0.9]、[0;0;0;sin(0.1t);cos(0.1t)],仿真时间t=20s,飞行器参数和控制参数如表1和表2所示。

表1 平面二关节飞行器仿真参数

表2 仿真控制参数
轨迹跟踪误差对比如图4~图8所示,给出了AC及NDOBC下的空间飞行器抓取非合作目标后的轨迹跟踪误差,其中图4、图5、图6所示为基座在X、Y方向及姿态的跟踪误差,图7、图8所示为关节1和关节2的跟踪误差。
可知,AC及NDOBC均可以使组合体达到稳定。在动态性能方面,自适应控制的超调大,但是响应快;稳态性能方面,NDOBC表现良好,稳态误差相对小一些。


图4 基座在X方向跟踪误差Fig.4 Tracking error of base in X direction

图5 基座在Y方向跟踪误差Fig.5 Tracking error of base in Y direction

图6 基座姿态跟踪误差Fig.6 Tracking error of base attitude

图7 关节1跟踪误差 Fig.7 Tracking error of joint 1
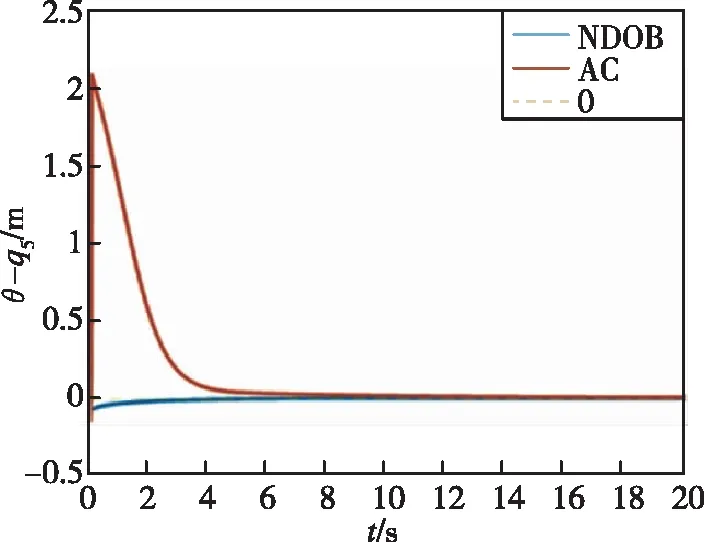
图8 关节2跟踪误差Fig.8 Tracking error of joint 2

图9 AC参数估计值Fig.9 Parameters estimation of AC
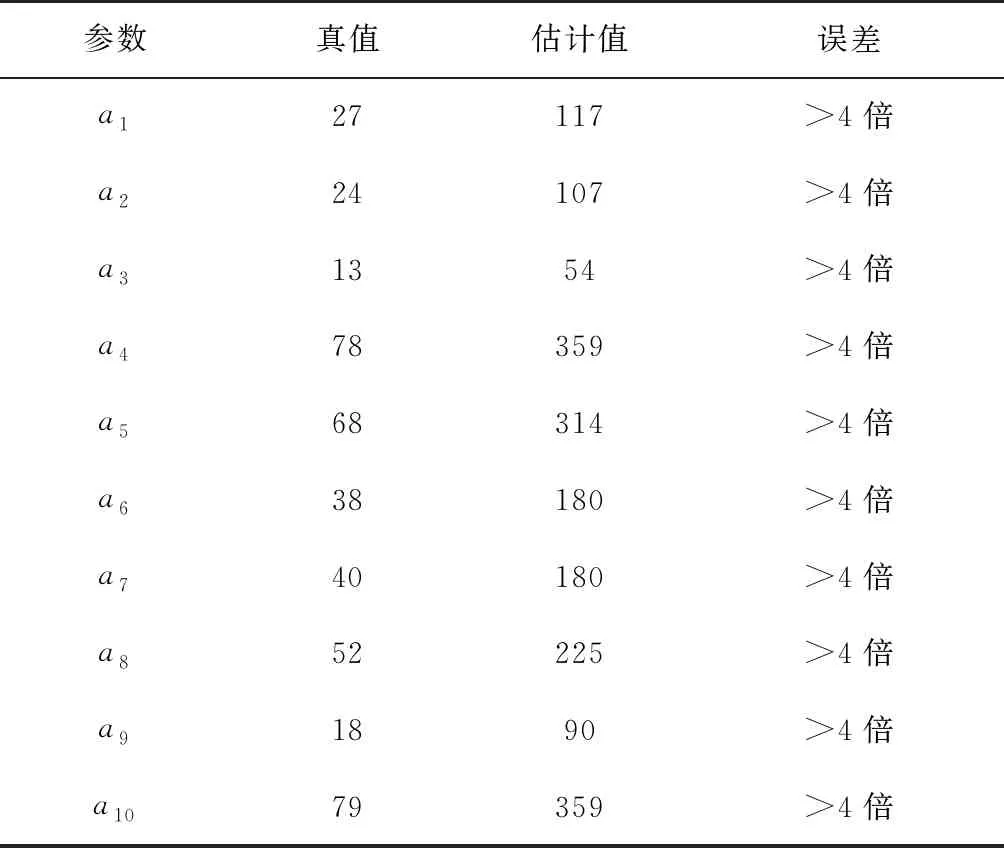
表3 AC估计值误差
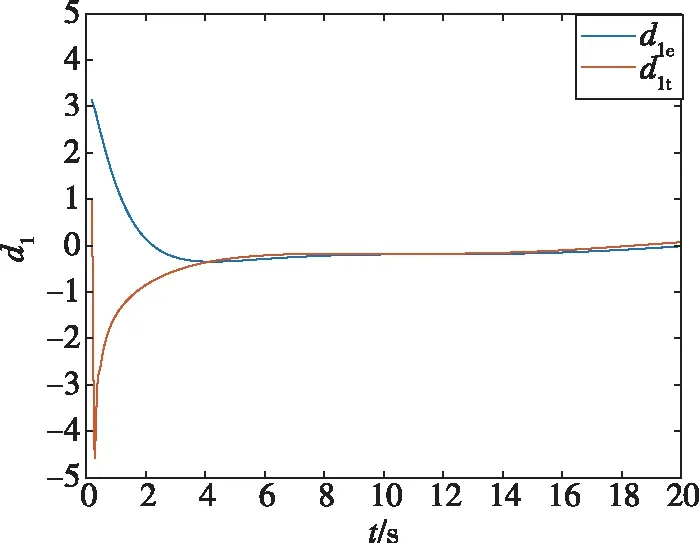
图10 NDOBC的估计值d1Fig.10 d1 of NDOBC

图11 NDOBC的估计值d2Fig.11 d2 of NDOBC

图12 NDOBC的估计值d3Fig.12 d3 of NDOBC

图13 NDOBC的估计值d4Fig.13 d4 of NDOBC

图14 NDOBC的估计值d5Fig.14 d5 of NDOBC
由图9可以发现,AC的参数估计值与真实值有超过4倍的偏差,所以自适应控制下的参数估计在保证组合体稳定的情况下,并不能达到准确估计未知参数的效果,与2.5节理论分析结果一致。
由图10~图14可以发现,NDOBC的干扰观测器可以相当准确地估计出复合干扰d,与2.5节理论分析及文献[16]得出的结论一致。
4.2 复合控制仿真验证
仿真初始化各参数与4.1节均一致,AC控制参数保持不变,NDOB控制增益cf=8,仿真时间t=100s。
图15和图16所示为整个仿真时间和达到稳态时间系统未知参数估计的变化规律;图17所示为系统达到稳态虚拟干扰df的真实变化,以验证ASSUMPTION是否合理。

图15 0~100s的参数估计Fig.15 Parameters estimation for 0~100s

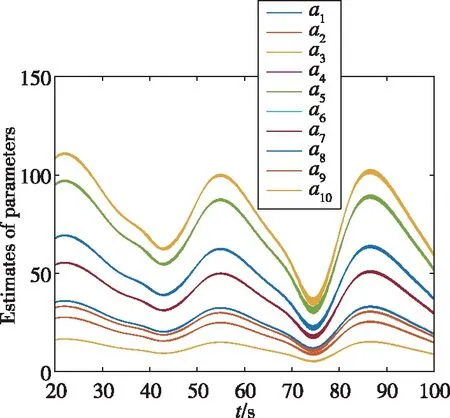
图16 20~100s的参数估计Fig.16 Parameters estimation for 20~100s
由图16可以看出,在NDOB观测下,系统参数估计值在较长时间内围绕定值周期性波动,发生波动的原因可能由ASSUMPTION引起,分析如图17所示。
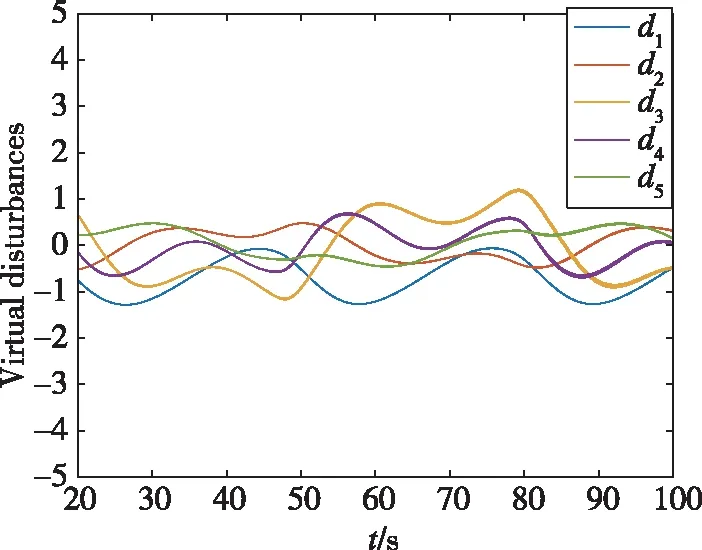
图17 稳态期间虚拟干扰d的真实变化Fig.17 Real change of virtual disturbance d for 20~100s
由图17可以看出,虚拟干扰df的变化并非缓慢或近似为0,而是围绕着df=0这条线以固定周期往复变化,并且该固定周期近似为期望关节运动轨迹的周期。因此由ASSUMPTION可知,用Basic NDOB方法估计虚拟干扰df会带来一定的误差。

为分析参数估计波动所带来的影响,对20~100s时间段内的估计值求平均值,如表4所示。
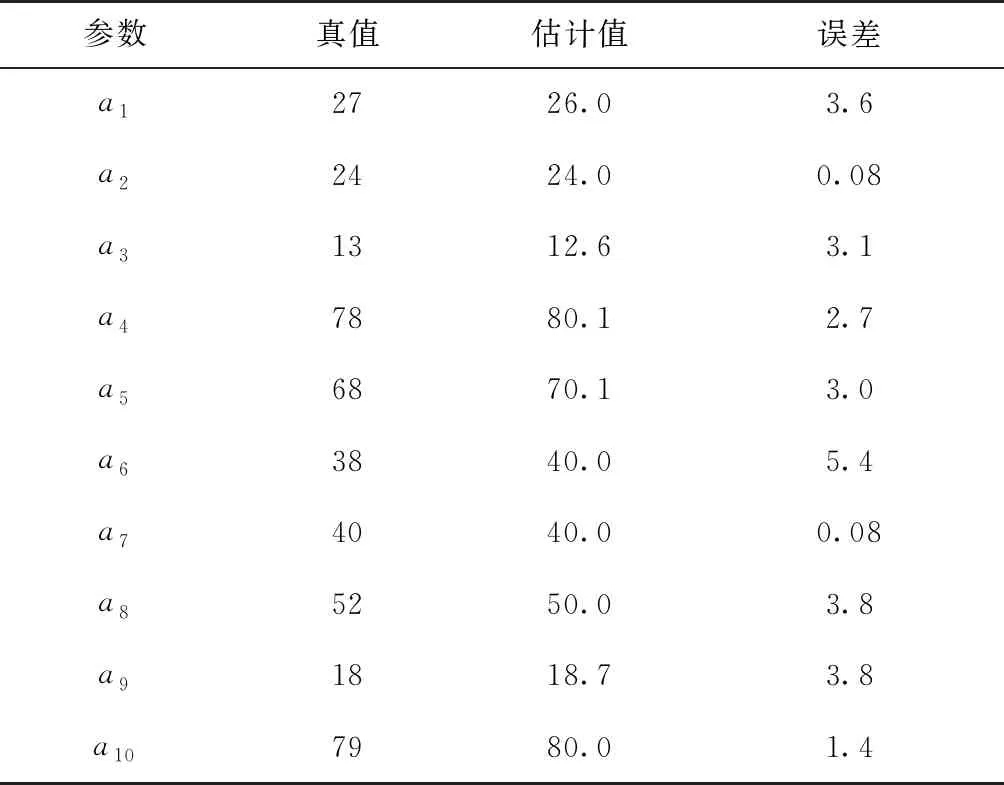
表4 复合控制估计值误差
其中,误差=|R-E|/R%,R为真值,E为估计值。
由表4可知,虽然采用Basic NDOB得到的参数估计值具有一定周期性波动,但是其平均值近似为系统参数真实值,相对于表3中AC参数估计误差有显著改善。
5 结论
本文针对空间飞行器抓取参数未知非合作目标后的稳定控制问题,提出了一种可以在线精确估计未知参数的复合控制方法。算法分析与实验结果表明:
1)在空间飞行器稳定控制应用方面,相对自适应控制下的组合体稳定过程动态响应快、稳态跟踪误差较差、参数估计值与真实值相差大,NDOBC的非线性干扰观测器能准确地反映组合体的不确定性部分,但是无法反映具体未知参数。
2)复合控制方法结合了二者各自的优点,相对于自适应控制,参数估计误差得到了显著改善,最终可限制在6%以内。
3)由于Basic NDOB的局限性,导致最终估计参数的周期变化,虽然可以通过求平均值来反映真实值,但是也限制了其在实际情况中的应用,如何克服这一局限性将是下一步研究方向。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
中国畜牧杂志(2022年4期)2022-04-15
西南交通大学学报(2022年1期)2022-02-11
计算机仿真(2021年3期)2021-11-17
军民两用技术与产品(2021年10期)2021-03-16
环球时报(2020-12-15)2020-12-15
北京航空航天大学学报(2020年10期)2020-11-14
火控雷达技术(2020年3期)2020-10-13
航空发动机(2020年3期)2020-07-24
中学课程辅导·教育科研(2019年3期)2019-09-10
