
测绘导航高精度定位关键技术及应用
2020-11-17 07:27韩厚增袁德宝
导航定位与授时 2020年6期
王 坚,刘 飞,韩厚增,杨 诚,袁德宝,胡 洪
(1.北京建筑大学测绘与城市空间信息学院,北京 102616; 2.中国地质大学(北京)土地科学技术学院,北京 100083; 3.中国矿业大学(北京)地球科学与测绘工程学院,北京 100083; 4.安徽大学资源与环境工程学院, 合肥 230601)
0 引言
人工智能(Artificial Intelligence, AI)、卫星导航及室内定位三大技术的快速发展持续推动测绘科技向智能化、学科交叉、信息融合的方向发展[1-2]。2018年4月,教育部出台《高等学校人工智能创新行动计划》,旨在优化布局高校科技创新体系和学科体系,在新一代人工智能基础理论和关键技术研究等方面取得新突破。2020年6月,我国成功发射北斗系统第55颗导航卫星,北斗系统星座部署提前半年全面完成,将全面进入应用推广阶段。2020年5月,中国卫星导航定位协会发布的《中国卫星导航与位置服务产业发展白皮书》显示,基于室内定位与卫星导航的室内外一体化融合定位技术的突破与应用是位置服务大众应用市场未来发展的关键,室内定位、5G、物联网等技术的融合将成为拓展位置服务应用的主要解决方案,目前已形成室内外一体化高精度无缝定位体系,定位精度可达分米级,甚至厘米级[3-4]。
在国家战略与市场化的双重推动下,测绘科技的基础理论、关键技术及仪器装备都发生了变革,测绘的内涵与外延出现了巨大变化。智能化背景下,测绘学科与导航学科的交叉融合形成了测绘导航方向,并得到了蓬勃发展[5]。高精度定位理论、算法及智能硬件成为测绘导航方向的基础支撑,应用场景可分为传统变形监测、施工放样、自然资源调查等低动态场景,无人驾驶、航空导航、武器制导[6]等高动态场景,以及火灾、地震等低动态和高动态混合定位场景[7],详细情况如图1所示。
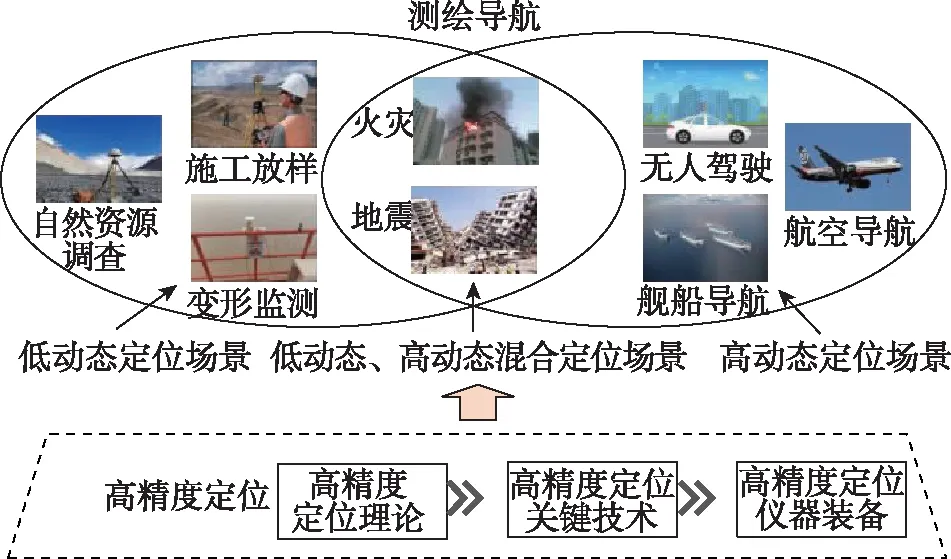
图1 测绘导航方向主要内容Fig.1 Main contents of surveying and mapping navigation direction
本文从测绘导航高精度定位基本形态、智能滤波定位模型、测绘导航定位模组等关键技术,以及无缝组网定位应用、车载导航定位应用、变形监测应用3个解决方案进行阐述,介绍了测绘导航高精度定位的关键技术及应用基本情况。
1 测绘导航基本形态
1.1 测绘导航装备虚拟化

图2 测绘导航装备向云端虚拟方向转变Fig.2 Transformation of surveying and mapping navigation equipment to cloud and virtualization
如图2所示,随着北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)/全球导航卫星系统(Global Navigation Satellite System,GNSS)多模接收机、AI定位芯片以及嵌入式导航定位模组等技术与装备的快速发展,出现了GNSS、惯性、视觉、激光雷达等多种类型的导航与定位传感器,促使测绘导航装备形态发生了变化。在大数据、物联网、边缘计算和云计算等技术的推动下,测绘导航装备逐渐朝着云端虚拟化方向发展。在工程实践中,可以实时在线预处理前端测绘导航硬件采集的数据,或通过物联网传输至云端平台进行远程在线解算,为用户提供高精度、实时定位与位置服务信息。导航装备发展呈现出高智能、高精度、高自动化和高抗干扰的特点,最终催生了测绘导航装备云端虚拟化发展的新业态。
1.2 测绘导航数据处理多样化
如图3所示,传统测绘数据处理主要是外业测量—内业处理模式,通常表现为事后解算、人工处理、计算器计算和单线程计算等。随着深度学习、AI、分布式计算等先进计算技术的使用,传统的数据处理模式逐渐向着云端实时处理、机器智能处理、边缘计算和分布式计算的方向发展,呈现出了较高的现势性、成效性、时效性和智能化水平。
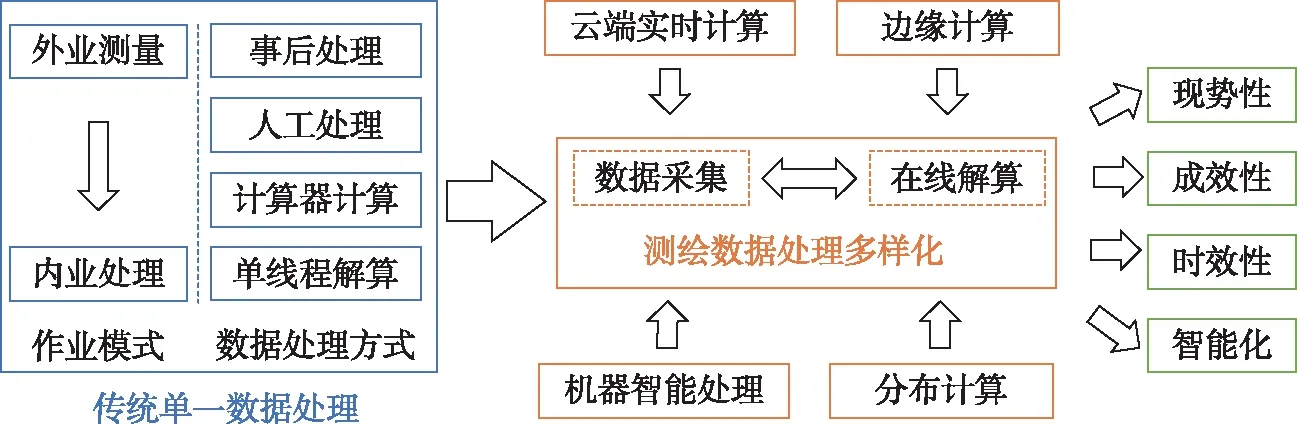
图3 测绘导航数据处理模式的转变Fig.3 Transformation of surveying and mapping navigation data processing mode
2 智能滤波定位模型
2.1 Kalman滤波模型
Kalman滤波(Kalman Filter,KF)理论是测绘导航领域应用最广、使用最成熟的滤波模型,在产品制造中应用广泛。KF基于最小均方误差原则,对线性系统的状态参数进行最优估计,其流程如图4所示。KF主要通过状态预测与状态更新2个过程对系统的状态参数进行估计。状态预测过程主要是利用上一解算历元的状态参数、方差和系统的动力学模型对当前历元的系统状态参数进行预测,然后使用滤波增益方程和状态更新方程对预测的系统状态参数进行优化更新,以提高系统状态参数的估计精度。KF算法顾及了上一解算历元的信息,并将其作为状态参数当前历元的先验信息,所以定位精度比仅考虑单历元定位信息的传统最小二乘法更优[8-9]。
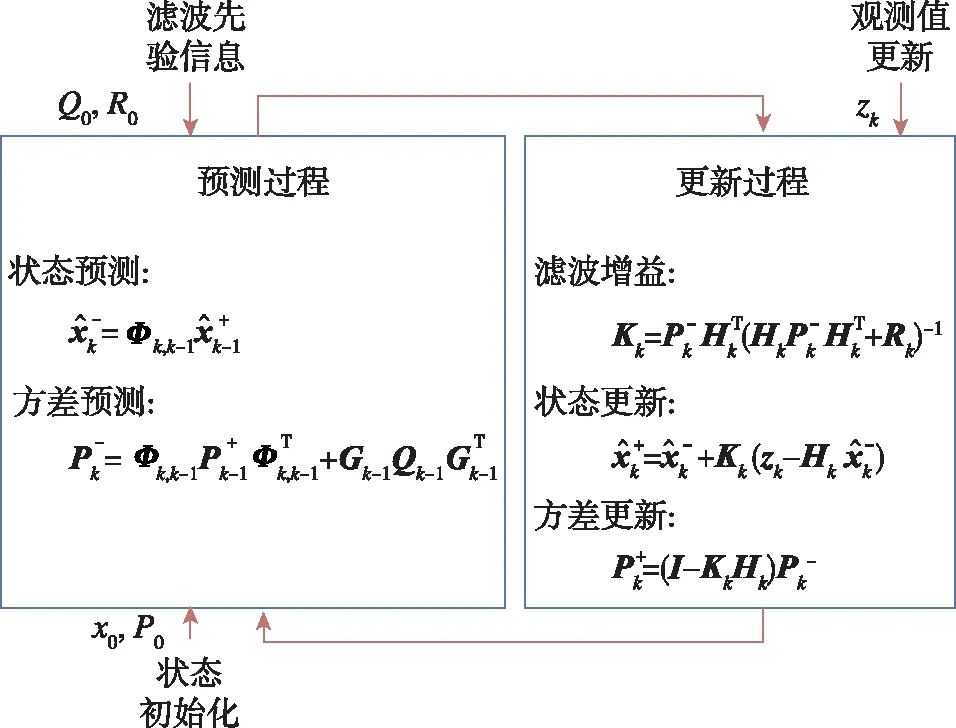
图4 Kalman滤波算法流程Fig.4 Flow architecture of Kalman filter algorithm
标准KF是基于运动模型解决简单线性定位问题[10],而针对非线性和复杂线性问题常采用扩展Kalman滤波(Extended Kalman Filter,EKF)、无迹Kalman滤波(Unscented Kalman Filter,UKF)、容积Kalman滤波(Cubature Kalman Filter,CKF)和粒子滤波(Particle Filter,PF)等。EKF采用一阶泰勒级数对非线性函数进行展开,进而满足标准KF的线性函数模型要求。UKF和CKF属于Sigma Kalman滤波,都采用有限样本点,在高斯分布的基础上,对状态参数的高斯分布进行拟合。PF基于贝叶斯理论和蒙特卡罗算法,采用样本点对状态参数的后验分布进行估计,回避了状态参数高斯分布的假设,可以逼近最优估计。表1描述了各种KF方法解决的问题和实现途径。
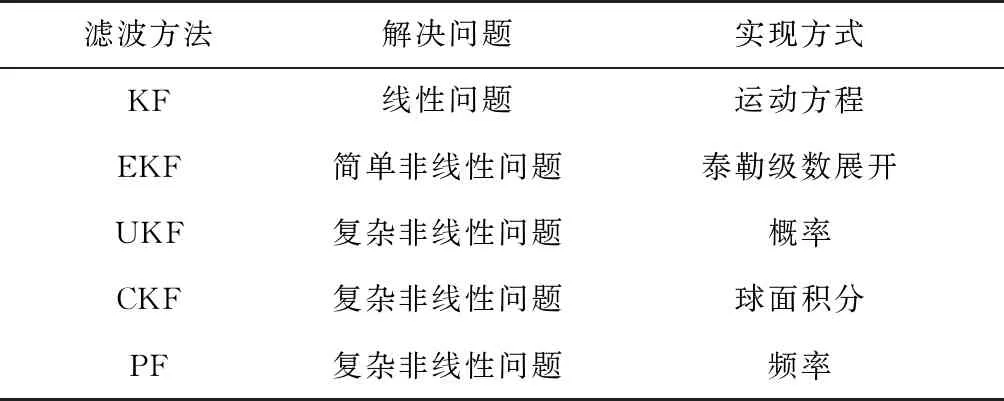
表1 Kalman滤波适用范围
若观测值和参数预报值均服从正态分布,KF能给出状态参数的可靠解。但当观测值受到异常污染或动力学模型扰动引起的预报状态参数异常时,KF解将受到严重歪曲。传统算法采用Sage-Husa自适应滤波和有限记忆滤波等,通过降低异常观测或异常预报状态参数来提高抗差性能[11]。针对同时出现观测异常和动力学模型扰动的情况,杨元喜院士建立了一种新的自适应抗差滤波理论,应用抗差权与自适应因子分别进行异常值观测及动力学模型误差的调节,从而得到了平滑的定位结果;并先后构建了四种动力学模型误差学习统计量和四种自适应因子,具体见文献[12]。
在复杂环境中,由于观测模型或动力学模型存在较大的非线性,使用泰勒级数展开的EKF会引入较大的非线性误差,使用UKF或CKF能够有效提高系统的状态参数估计精度。Yang等[13]针对UKF的动力学模型扰动,构建了新的极值函数,提出了基于自适应因子的自适应无迹Kalman滤波(Adaptive Unscented Kalman Filter,AUKF),并进一步构建了基于抗差因子的自适应抗差无迹Kal-man滤波来处理动力学模型扰动和观测异常[14]。在室内超宽带(Ultra Wide Band,UWB)定位中,由于传统的非线性滤波无法对观测粗差进行抑制,使用抗差非线性Kalman滤波可以有效地提高室内定位精度[15]。
针对组合导航的函数模型高非线性问题,PF也被广泛应用于对组合导航系统状态参数的估计。PF的估计精度在一定程度上取决于重要性密度函数(Importance Density Function,IDF)和粒子的数目。PF的重采样过程中,会造成粒子退化和枯竭问题,结合模拟退火算法可以有效解决粒子退化问题[16]。
2.2 智能滤波定位模型
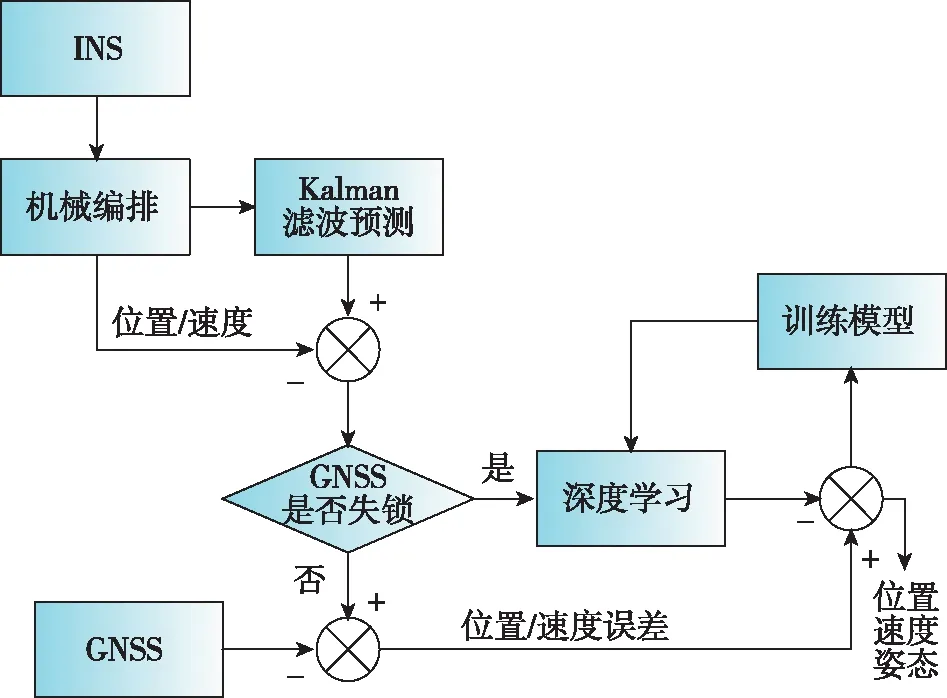
图5 基于神经网络的GNSS/INS智能融合定位模型Fig.5 GNSS/INS intelligent fusion location model based on neural network
KF模型一般采用时不变的模型参数,在实际状态中,与神经网络等智能模型结合,可建立更加符合实际的动态模型,并形成智能融合模型。惯性传感器的零偏误差存在随时间漂移的问题,导致误差模型无法准确地对传感器误差进行估计[17]。因此,需要对误差模型的参数进行实时调整,以便对传感器的误差进行准确估计。针对GNSS与惯性测量单元(Inertial Measurement Unit,IMU)组合导航系统中,卫星系统受到遮蔽,IMU独立工作精度降低较快的问题,可以通过神经网络在GNSS信号完好时对导航系统的误差进行学习;在卫星信号受到遮蔽的情况下,对导航系统误差进行估计和补偿,以提高导航定位精度[18]。如图5所示,神经网络和KF融合构成惯性导航系统(Inertial Naviga-tion System,INS)/全球定位系统(Global Positio-ning System,GPS)集成智能定位模型。GNSS可用时,采用深度学习对INS定位的非线性误差进行建模;GNSS失锁后,神经网络可以预测INS定位的非线性误差,从而提高定位精度。然而,GNSS与INS的组合仍然存在传感器自身的局限性。在面对无人驾驶的挑战中,复杂环境下长时间连续可靠的导航定位对定位精度和可靠性提出了更高的要求。在目前主流的GNSS与INS组合导航的基础上,需要对周边的场景进行感知,并提供冗余的导航信息。因此,需要使用不同的传感器获取不同的导航信息,例如影像传感器和雷达传感器等。进一步,亦可通过深度学习技术与传统滤波算法相结合,对载体周边环境进行感知、分类和提取,充分挖掘不同传感器多元异构数据间的有效信息,对传感器数据本质进行精确描述,从而提高误差模型的准确性,促进导航系统的智能化。智能定位模型在无人驾驶云定位和智能测绘仪器终端等领域将会获得广泛应用,AI芯片也将成为相关产品的核心组成部件[19]。
3 测绘导航定位模组关键技术
3.1 模组研制技术流程
模组是进行测绘导航产品二次开发的关键零部件之一,具备相对独立的功能,可以嵌入到无人驾驶智能终端、机器人导航终端及武器终端等各类设备中。随着导航与位置服务产业的发展,测绘导航模组将在各个领域得到广泛应用。定位模组研制技术是高精度定位应用的重要支撑。图6描述了车载导航模组研发的主要流程,大致可分为印制电路板(Printed Circuit Board,PCB)设计、制板、模组测试和模组量产4个阶段。
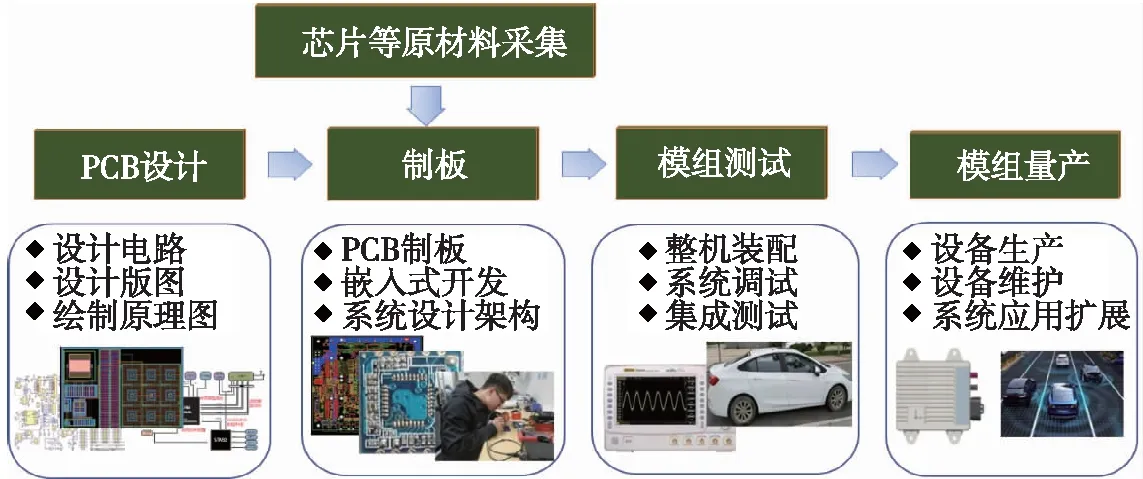
图6 定位模组研发技术流程Fig.6 Technical flow of positioning module research and development
3.2 嵌入式效率优化
模组的嵌入式固件属于资源受限系统,计算效率的提高是一个关键问题。嵌入式效率优化通常有替换算法,如选择快速排序方法;汇编法,对关键部分进行改写,以提高运算速度;空间换时间法,如在设计数据结构时,为了减少协议数据结构的循环延时,对数据结构的层次关系进行扩展,采用内存空间来换取时间;避免递归法,尽量不使用递归;采用内存池减少频繁的小对象的分配和释放等方法。
除了采用以上嵌入式效率优化途径外,在测绘导航模组研制过程中,本文提出了图7所示的三项技术用于提高模组的整体性能:第一是原始信息同步采集与延时补偿,通过建立多源传感器时间同步误差估计和补偿模型,构建融合时间补偿参数的状态方程,提高GNSS/INS传感器时钟精确匹配的稳健性,实现匹配精度优于1μs;第二是自适应定位算法代码稳健性,通过研制自适应定位理论模型与算法,按MISRA C编程规范标准编写稳健代码,实现分米级-厘米级-毫米级多层次、高精度的GNSS/INS导航模组开发;第三是嵌入式固件高效解算,采用序贯更新策略,时间片轮转、优先级抢占、共同语句结构协作等多线程机制,达到时间分片的目的,降低嵌入式平台的资源消耗,实现固件高效解算。

图7 嵌入式固件高效解算Fig.7 Efficient solution of embedded firmware
3.3 高精度定位模组
基于上述技术,研制覆盖分米、厘米及毫米级定位精度的无缝定位模组、车载导航模组及变形监测模组,如图8所示。开发相应的定位终端,并给出了各自应用的解决方案,进行应用推广。下文将重点介绍系列模组在不同场景中的应用情况。
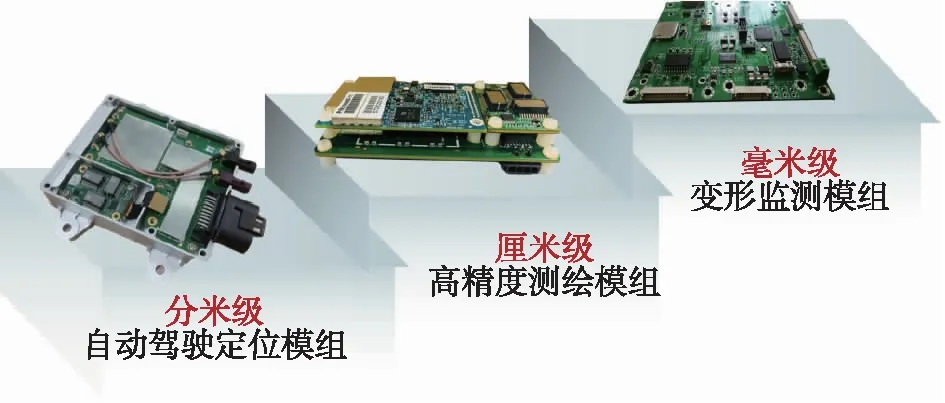
图8 分米/厘米/毫米级无缝定位模组Fig.8 Decimeter/centimeter/millimeter positioning module
4 无缝组网定位应用
无缝定位是指通过室外定位技术和室内定位技术相结合的方式解决室内外高精度定位和无缝衔接的问题,是国际领域研究前沿,在国内外得到了极大的重视和发展。例如中国提出了羲和计划、美国部署了洞悉战场计划和下一代911项目、欧盟开展了伽利略本地技术计划等。随着北斗等全球四大卫星导航定位系统全部在线运行,在室外环境下可以提供实时、全天候、全球性的高精度导航信息,能够满足多领域的应用需求。在室内虽然有WIFI、UWB、射频(Radio Frequency,RF)、蓝牙等多种技术手段可以实现米级精度定位,但是高精度室内目标定位问题仍然极具挑战性。
GNSS/UWB融合无缝定位技术是比较常见的高精度无缝定位解决方案,在机器人导航、无人驾驶导航、工厂仓库物料调度、监狱服刑人员监控、应急救援力量监控等多类场景得到广泛应用。
4.1 无缝组网定位解决方案
首先,在建筑物的安全通道、窗户等与室内通视的地方布设GNSS/UWB设备,构建区域定位基准,用于将GNSS定位基准传递到室内。其次,在过渡区域且与室内外通视的区域布设UWB设备,测量自身到基站的距离并传输至服务系统,服务系统通过边长交会算法确定该点坐标,以此类推,自动获得3个以上的UWB点位坐标。在室内定位基准构建时,首先,按照一定的规则将这些设备放在走廊和房间里;然后,第一个锚点位置上的UWB设备测量该点与过渡区域内至少3个锚点的距离,将其传输至云平台,利用云平台计算出近似坐标,并通过测边网平差方法对室内UWB网络进行平差处理,以提高网络精度[20];最后,救援人员携带UWB标签进入室内,通过测量与周围基站的距离信息,并传输至云平台,实现自身高精度定位。该技术能快速实现GNSS信号遮蔽/半遮蔽区域的坐标基准建立和高精度定位,解决火灾救援应急定位、综采面人员安全定位、智能建造无缝位置服务等问题。详细过程如图9所示。
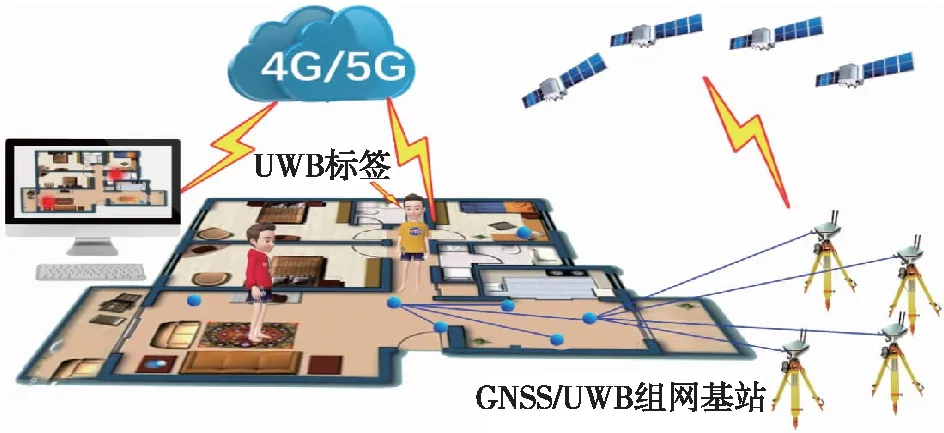
图9 室内外无缝定位解决方案Fig.9 Seamless indoor and outdoor positioning solution
4.2 无缝组网定位终端
图10(a)是UWB组网基站,支持4G通信,支持标签和基站两种工作模式(自动/手动切换),可实现分米级精度定位。图10(b)是GNSS/UWB组网基站, 支持4G通信,支持GNSS、UWB、GNSS/UWB三种工作模式(自动/手动切换),适应室内外一体化定位环境(室外GNSS模式、过渡区GNSS/UWB模式、室内UWB模式)。

(a)UWB组网基站

(b)GNSS/UWB组网基站图10 应急组网定位装备Fig.10 Emergency networking positioning equipment
4.3 无缝组网定位案例
模拟某大楼发生火灾、断电场景。原有定位基站无法工作,烟雾导致救援人员无法区分方向,需要室内外无缝定位提供位置服务。图11(a)是模拟火场,由大楼入口、大厅、走廊和实验室等组成,长60余米(X轴),宽10余米。图11(b)是消防员由室外进入室内携带并布设的GNSS/UWB、UWB组网设备。图11(c)是组网临时坐标基准建立后实现的消防员定位轨迹和定位误差,其中,蓝色轨迹点是鲁棒扩展Kalman滤波定位算法解算的移动轨迹,与黑色实线表示的真实轨迹基本一致,计算结果表明平面定位误差约为0.37m,且90%的点位误差小于0.5m。因此,该无缝定位技术和方案能实现分米级精度人员定位,满足室内外无缝应急定位的重大导航需求。

(a)模拟火场大楼
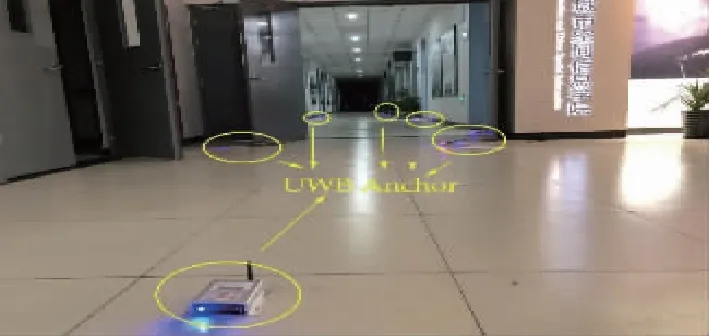
(b)组网设备布设
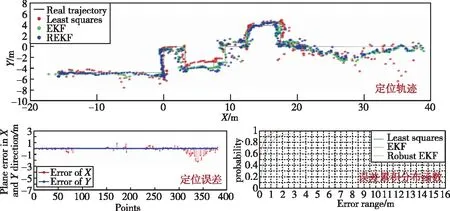
(c)无缝定位轨迹及定位误差图11 火场无缝定位模拟实验Fig.11 Simulation experiment of seamless location in fire scene
5 车载导航定位应用
5.1 高精度无人驾驶导航解决方案
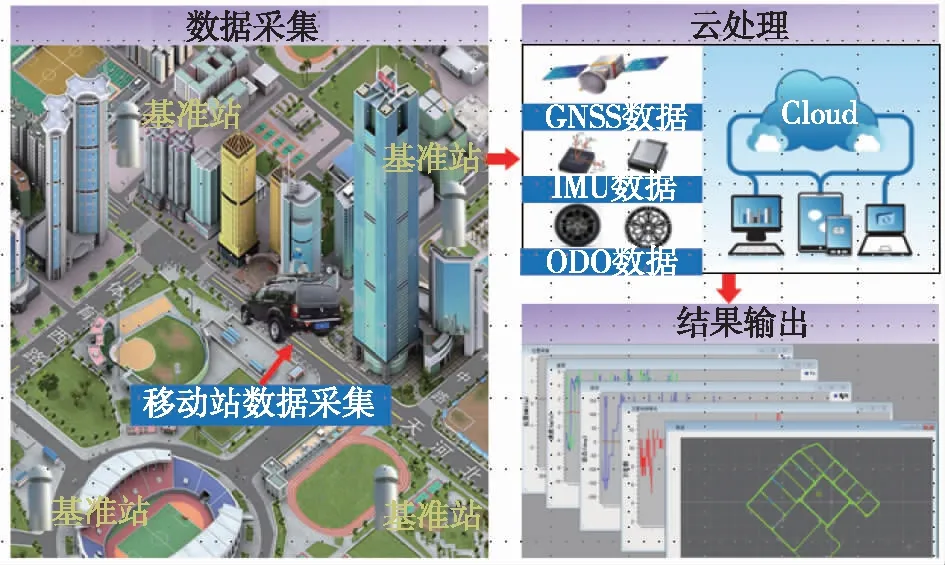
图12 高精度无人驾驶导航云方案Fig.12 High precision unmanned navigation cloud scheme
图12给出了本文采用的高精度无人驾驶云导航解决方案。基于GNSS基准站,无人驾驶车采集GNSS数据、IMU数据和里程计数据,并实时传输至云端进行计算,输出计算结果辅助无人驾驶。提前在云端布设高精度GNSS RTK/INS/Odometer的多源异构数据融合定位算法,具有实时性、高精度、高可靠和低成本的特点。
5.2 车载导航定位终端
图13所示为车载导航终端(INAV2.0),能实现实时动态(Real-Time Kinematic, RTK)模式定位精度2cm+基线距离×1×10-6、姿态测量精度0.01°和航向角测量精度0.02°。该装备可为车辆提供厘米级定位定向数据。
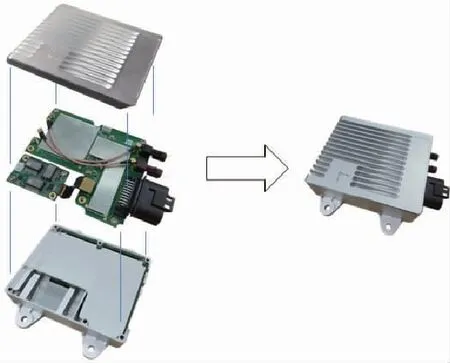
图13 iNAV2.0组合导航模块Fig.13 iNAV2.0 integrated navigation module
5.3 无人驾驶导航定位案例
在开阔环境、楼宇遮挡、树木遮蔽、高架桥环境和城市隧道5种城市环境开展了600km测试。基于GNSS RTK/INS/Odometer的无人驾驶导航测试如图14所示,不同GNSS信号遮蔽程度下无人驾驶导航偏差不同:遮蔽越严重,偏差越大。以高精度GNSS与光纤IMU组合导航系统作为参考,对上述环境下的定位精度进行评价,具体导航位置均方根误差见表2:开阔环境下平面均方根误差为毫米级,高程1.4cm;楼宇遮挡环境下,平面均方根误差为2cm,高程3.3cm;高架桥环境下,普通GNSS无法产生有效定位数据,但GNSS RTK/INS/Odometer组合导航平面定位精度可达0.2m,具有良好效果;城市隧道环境下,仅依靠INS/Odometer融合定位,30s内定位精度优于0.4m、1min内定位精度约1m、2min内优于2m。

图14 测试环境Fig.14 Test environment
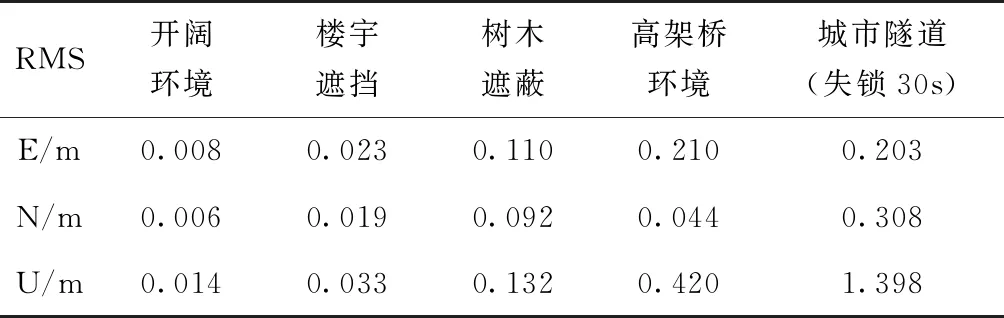
表2 不同测试环境下无人驾驶导航位置均方根误差
6 变形监测应用
6.1 变形监测云解决方案
变形监测云解决方案主要包括高精度GNSS/MEMS IMU监测终端和光纤光栅应力传感器等构成的数据采集系统、4G/5G/WIFI构成的数据传输系统、基于云计算的数据处理系统和手机等移动终端构成的用户服务系统。该方案流程是采集多源异构数据,通过数据传输系统实时发送至云端数据处理系统进行计算与安全评估,最后将变形监测结果实时发送至用户服务系统。详细情况如图15所示。
该方案集成了BDS/GNSS/MEMS IMU高精度融合数据处理模型、边缘计算和云计算的优势,具有高精度、低延迟、全天候、常态化实时监测的特点,能解决滑坡、桥梁等构筑物变形体/震动体的智能监测与快速预警问题。
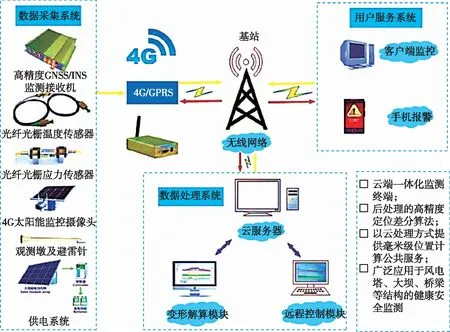
图15 变形监测云端解决方案Fig.15 Cloud solution for deformation monitoring
6.2 变形监测软硬系统终端
图16所示为高精度GNSS/MEMS IMU监测硬件终端,体积小、质量小、易于安装与携带,能够实时在线数据传输,并兼容BDS/GPS/GLONASS/GALILEO四系统导航定位信号。它集成了BDS/GNSS/MEMS IMU多系统数据采集处理,实现了多源异构数据云在线紧耦合毫米级高精度定位服务。

图16 高精度GNSS/MEMS IMU监测硬件终端Fig.16 High precision GNSS/MEMS IMU monitoring terminal
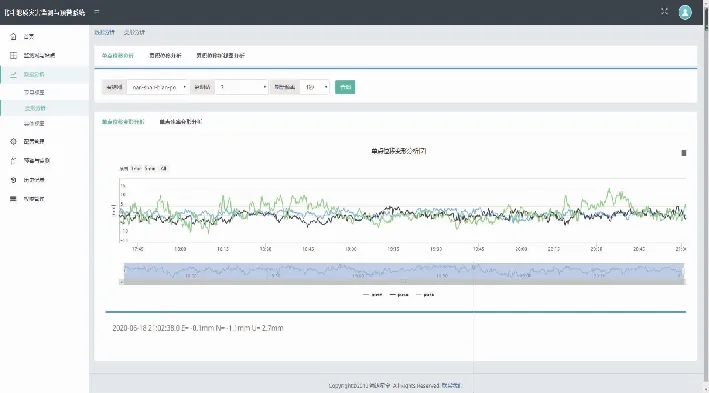
图17所示为高精度变形监测软件系统,图17(a)是软件登录界面,图17(b)是软件监测界面,实时监测卫星星空图、信噪比、接收卫星数量和DOP值等信息,以及东北天三维形变量和累计位移变化。

(a)软件登录界面
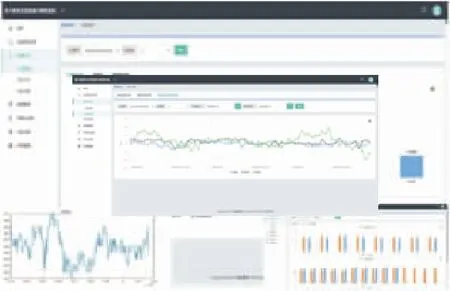
(b) 软件监测界面图17 高精度变形监测软件系统Fig.17 High precision deformation monitoring software system
6.3 变形监测应用案例
高速公路等边坡地形陡峭,地基土层松软、岩石风化,滑坡风险系数高。图18所示为山西省吕梁某高速公路施工沿线边坡滑坡变形监测与预警系统的监测位置、监测站设备安装和监测软件系统。

(a)滑坡监测区域位置

(b)边坡地形与监测设备安装
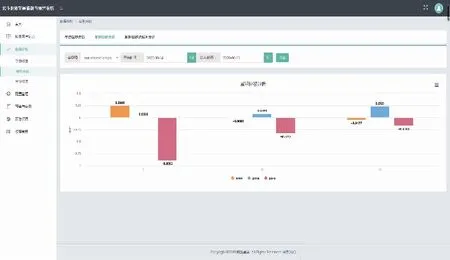
(c)变形累计位移量
(d)东北天变形量实时监测图18 滑坡变形监测与预警Fig.18 Landslide deformation monitoring and early warning
某监测站点24h连续监测东北天三维累计变形量位移分别为:E-0.01mm,N-0.08mm,U-0.32mm;24h连续监测东北天形变标准差分别为:E-1.92mm,N-2.81mm,U-5.83mm。
7 结论
高精度定位催生了测绘导航研究领域,拓展了测绘学科的内涵与外延。本文重点研究了高精度定位关键技术及其应用,形成了以下结论:
1)测绘导航装备呈现出高智能、高精度、高自动化和高抗干扰的特点;数据处理呈现出了较高的时效性和智能化水平,测绘导航装备虚拟化与数据处理多样化将成为测绘导航的基本形态。
2)智能定位模型在多传感器融合和复杂场景下定位具有较大优势,未来将会在无人驾驶定位和智能测绘仪器终端研制等领域获得广泛应用。
3)基于GNSS/UWB的无缝组网定位技术,能够快速实现GNSS信号遮蔽/半遮蔽区域的坐标基准建立和高精度定位,解决火灾救援应急定位、综采面人员安全定位、智能建造无缝位置服务等问题。
4)本文提出的GNSS RTK/INS/Odometer技术可以在楼宇遮挡、树木遮蔽、高架桥环境和城市隧道等城市环境下获得较好的定位效果。
5)变形监测系统可实现毫米级定位精度,能够解决滑坡、桥梁等构筑物变形体/震动体的智能监测与快速预警问题。随着智能滤波算法和定位模组生产工艺的不断发展,高智能、高精度的定位终端研制将会不断取得突破。
猜你喜欢
今日农业(2022年15期)2022-09-20
科学家(2022年3期)2022-04-11
北京航空航天大学学报(2021年7期)2021-08-13
汽车工程(2021年12期)2021-03-08
小雪花·小学生快乐作文(2020年7期)2020-10-12
通信产业报(2020年31期)2020-09-10
北京汽车(2019年2期)2019-05-16
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
学苑创造·B版(2018年3期)2018-06-07
