
基于半参数估计的智能手机WiFi-RTT定位方法
2020-11-17 07:27郭笑尘李子申王宁波
导航定位与授时 2020年6期
郭笑尘, 李子申, 汪 亮,王宁波
(1.中国科学院空天信息创新研究院,北京 100094; 2.中国科学院大学,北京 100049)
0 引言
基于位置服务的应用日益广泛,对定位精度的要求也越来越高[1]。随着Android操作系统开放卫星导航原始数据接口,智能手机即将成为大众高精度定位的主要设备。相对于卫星导航可解决室外绝大部分地区的高精度定位问题[2],室内以及室内外过渡区域的高精度定位尚未形成十分成熟的解决方案。针对智能手机,现有定位方法在原理上大体可分为基于测距或测角信息、基于航位推算和基于先验信息匹配等三类。相对而言,以测距或测角为核心的定位方法是通过与卫星导航紧组合实现手机高精度定位的主要手段,包括但不限于WiFi、超宽带、蓝牙、5G、声音等[3]。
目前,WiFi的应用最为广泛,特别是IEEE 802.11mc 精细时间测量(Fine Time Measurement,FTM)协议提供了WiFi的测距功能[1],即:WiFi-往返时延(Round Trip Time,RTT),为室内高精度定位提供了新的技术手段[4]。WiFi-RTT通过计算手机与路由器往返时间差确定二者之间的距离。相对于到达时间(Time of Arrival,ToA)和到达时间差(Time Difference of Arrival,TDoA)等传统测量方式,RTT可消除时钟误差对测距结果的影响,使测距精度更高[5-7]。以谷歌、Compulab为代表的路由器已经具备WiFi-RTT功能,Android 9.0也可支持WiFi-RTT功能,为WiFi-RTT定位技术的发展和应用奠定了基础[8-9,22]。
截至目前,国内外已有多个团队开展了WiFi-RTT定位技术的探索与研究。Intel公司在2016年室内定位与导航国际会议上提出了WiFi FTM与地图融合的精确定位方法。Leor Banin等提出了一种基于贝叶斯估计的WiFi FTM定位方法,一定程度上解决了非线性模型中Kalman滤波器存在的风险发散问题,但是忽略了测距过程对结果的影响[10]。2018年7月,Leor Banin和Ofer Bar-Shalom基于广播网络协议,通过被动测量FTM传感器之间时差,实现了跟踪定位[11]。2018年11月,Mohamed Ibrahim等在独立测距环境下对WiFi-RTT性能进行了系统评估[12]。2019年1月,Nir Dvorecki等提出了一种基于机器学习的FTM测距方法,建立了真实环境精确测量值与室内通道模拟值的训练模型,定位精度优于传统最大似然估计方法[7]。2019年3月,陈锐志团队利用无迹Kalman滤波融合WiFi测距模型和惯性导航传感器,获得了高精度定位结果[13]。
总体来看,近年来WiFi-RTT定位技术发展迅速,但是现有研究仍然缺乏对WiFi-RTT测距误差源及其特性的详细分析,定位数学模型也亟待完善。针对此,本文将在简要阐述WiFi-RTT测量原理、对WiFi-RTT误差源进行分析的基础上,结合WiFi-RTT系统误差不稳定的特点,提出了一种基于半参数的WiFi-RTT定位方法。通过实测试验对其定位精度进行验证,并与经典最小二乘方法进行比较分析。最后,对本文研究进行总结,指出后续工作重点。
1 基于半参数的WiFi-RTT定位方法
1.1 WiFi-RTT测距原理
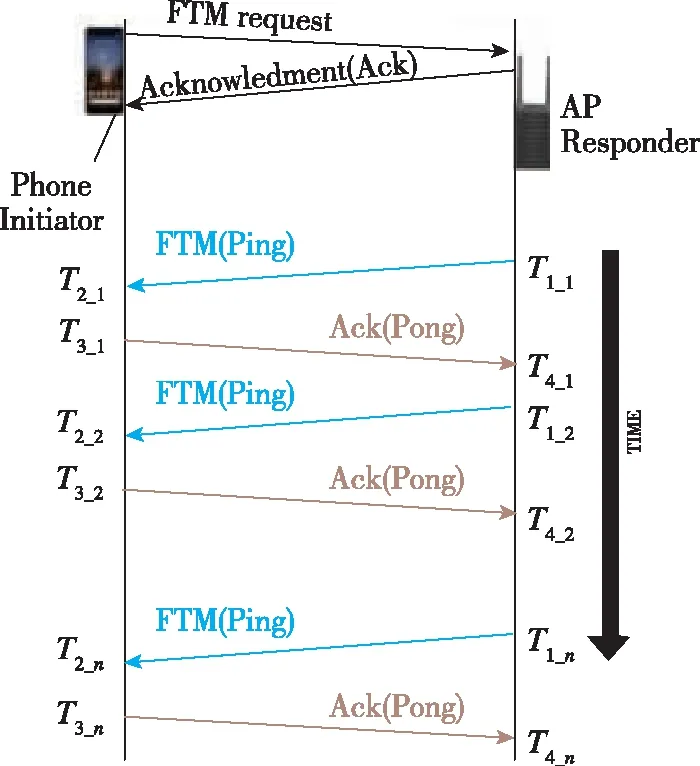
图1给出了WiFi-RTT测距工作的基本原理[15],其中,AP代表具备WiFi-RTT功能的路由器。在IEEE 802.11mc协议框架下,手机发送FTM请求启动测距程序,如果协议响应,则AP开始发送FTM信息并等待回复,RTT即可根据信息发送以及接收时间的时间戳来估计二者之间的距离[16]。需要注意的是,为了避免冲突,AP必须在得到确认信息后才会发送新消息。
(a)工作原理
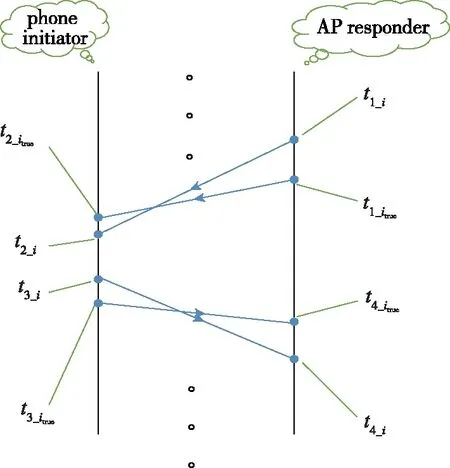
(b)改进模型图1 IEEE 802.11mc协议框架下WiFi-RTT测距Fig.1 Working principle of WiFi-RTT ranging under the IEEE 802.11mc protocol framework
如图1(a)所示,WiFi-RTT测距公式如下
(1)
其中,dRTT表示测距结果;RTT表示多次测距循环时间均值;c表示真空环境下的光速(下同);t1_i表示信号第一次从路由器AP发出时的时间戳;t2_i表示信号到达手机时的时间戳;t3_i表示手机发出应答信号时的时间戳;t4_i表示应答信号到达路由器时的时间戳。其中,N代表WiFi-RTT测距成功的次数,默认为8。
通过路由器和手机之间时间戳作差即可实现测距,这种方法解决了ToA和TDoA等传统方法中因设备钟差不一致而引入的测距误差,使得测距结果更精确可靠[12];同时,以多次测距循环时间均值作为测距时间参与测距结果计算,测距精度得以提高。
1.2 WiFi-RTT测距误差
WiFi-RTT测距主要受路由器和手机信号时延、通信协议时延、多路径以及非视距等误差影响。其中,前两者常被看作系统误差,后两者常被看作随机误差,定位解算过程中需采用不同方法进行处理。
(1)信号时延误差
如图1(b)所示,路由器或手机在收到对方发送的测距信号时,会触发形成新的应答信号,从收到信号到触发形成应答信号发射出去的时间延迟称为路由器或手机信号时延,在WiFi-RTT测距方程中的表现形式如式(2)所示。该误差表现为一定的系统性和随机性,具体在试验章节中进行分析。
(2)
其中,Δtrans表示时延误差;Δ1_i、Δ2_i、Δ3_i、Δ4_i分别表示每次测距过程中,在手机或路由器2次转发形成的时间延迟;t1_itrue、t2_itrue、t3_itrue、t4_itrue分别表示每次测距过程中真实转发时间戳。
(2)通信协议时延误差
WiFi芯片RTT FTM信令受带宽差异(20MHz、40MHz或80MHz)和前同步码类型影响,从而引入定时偏移,称为通信协议时延,如式(3)所示
(3)
其中,Δcom表示由通信协议引入的测距误差;dtype表示前同步码类型长度;BDW表示带宽。依经验,取值范围为5~13.5m。
(3)非视距误差
实际环境中的阻隔层通常会导致信号发生衍射,使得信号传播距离较实际直线距离变长,称为非视距误差。Ibrahim等用铝箔片作为阻隔层,发现当阻隔层向手机方向移动时,估计距离会显著增加;阻隔层靠近路由器时,则不会影响测量结果[12]。本文将设计专门试验以分析非视距误差对WiFi-RTT测量的影响。
(4)多路径误差
受周围环境反射影响,手机或路由器接收到的信号可能是直达和反射信号的叠加,从而造成多路径误差[14,17]。本文将在空旷环境下设计不同的试验,分析WiFi-RTT测量中的多路径误差影响。
1.3 WiFi-RTT半参数定位方法
试验表明,因路由器和手机信号时延以及通信协议时延造成的系统误差对WiFi-RTT测量的影响呈现出一定规律性;但是,对不同观测群的影响又表现出一定的随机性。总体上看,这种系统误差属于随机性系统误差,在测量中称为半系统误差[18]。与其他半系统误差相似,WiFi-RTT测距半系统误差在测距开始时确定;同时,在信号传递过程中受到热噪声影响,表现出随机性。因此,利用半参数模型设计WiFi-RTT定位方法,在忽略高程的二维空间内的定位模型可表示为式(4)~式(6)[19]
L=Bx+S+Δ,P
(4)
(5)
(6)
其中,L表示n维WiFi-RTT测量残差矩阵;B表示列满秩系数矩阵;x表示待估坐标的修正量;(Xi,Yi)表示已知的路由器坐标, (X0,Y0)表示待定坐标近似值;S表示n维系统误差向量;Δ表示n维随机误差向量;n表示路由器个数;P表示权阵,由测距方差D计算,忽略不同路由器之间的相关性,非对角元素为0。
半参数模型在获得超过3个路由器的测距信息后即可实现定位解算[20],如式(7)所示
(7)

2 试验与结果分析
2.1 实验条件
在相对开阔的室内,将路由器固定在等高的三脚架上,搭建WiFi-RTT定位测试环境,如图2所示,以路由器的外置天线中心和手机的几何中心作为参考点。其中,试验设备包括使用Compulab公司的WILD路由器和谷歌pixel 4手机;数据采集软件采用自研APP,并将其与谷歌官方WifiRttScan软件输出结果进行比对,验证了其正确性。
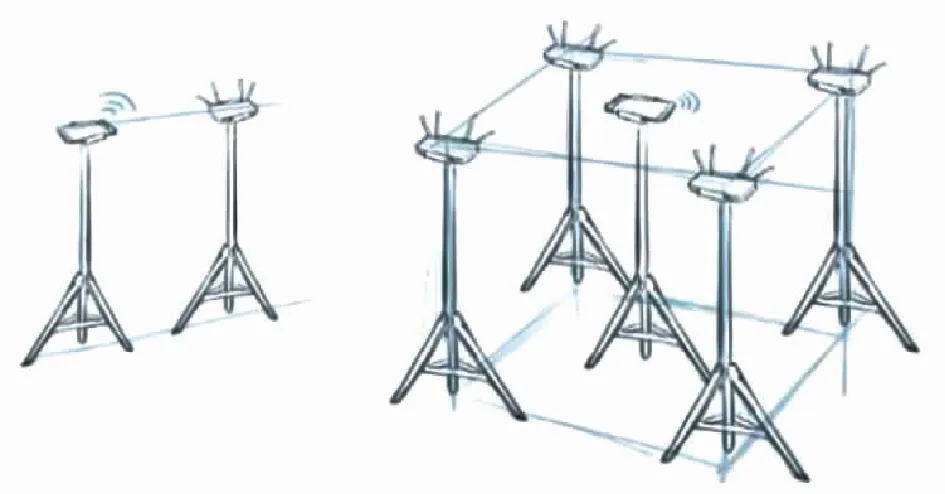
(a) (b)图2 WiFi-RTT测距(a)和定位(b)试验装置示意图Fig.2 Schematic diagram of test equipments for WiFi-RTT ranging(a) and positioning(b)
2.2 WiFi-RTT测量误差分析
与其他定位方式类似,试验首先对WiFi-RTT的测量误差进行讨论。
(1)系统误差
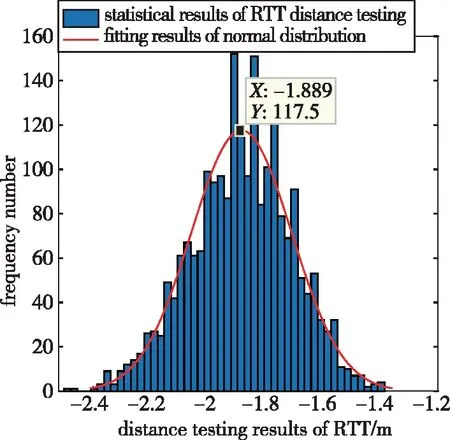
在图2(a)所示的试验环境中,以80cm的步长将手机从10m左右的距离逐渐靠近路由器,统计测距结果与实际距离的关系,分析系统误差的大小和变化规律;试验中设置每组测量时长为30min,采样周期为500ms。如图3所示,给出了实际距离与每组测量平均值之间的对应关系,以及每组测量的均方差。可以看到,实际距离与测量平均值表现出较好的线性关系,相关性优于0.91,截距为-5.33m,即可认为是系统误差。在此基础上,固定手机和路由器的距离为6.4m,进行8次平行试验,采样点共计3600个。如图4所示,给出了每次测量的系统误差值及测量均方差。可以看到,多次平行试验中系统误差并不稳定,极差可达0.3m。将所有数据(3600个)进行统计分析,数据呈正态分布,如图5所示。因此,认为试验设备的WiFi-RTT测距系统误差并不是常数性系统误差,表现出了一定的规律性和随机性,是典型的半参数系统误差。
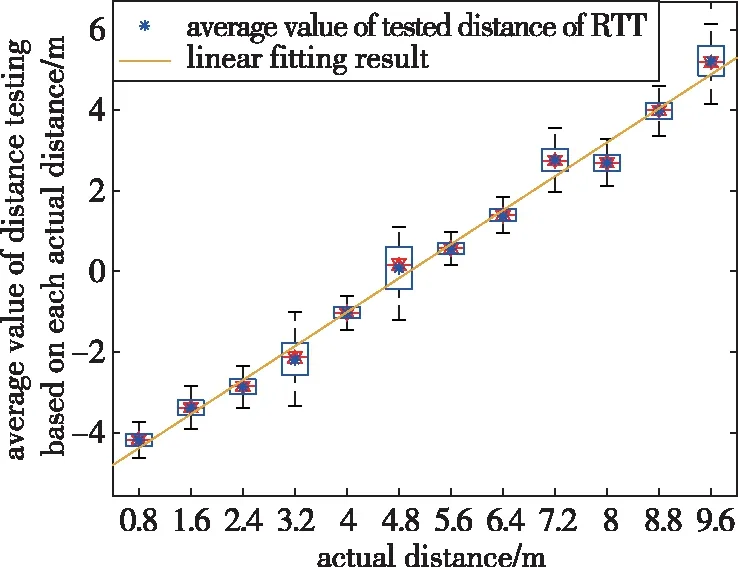
图3 线性位移下,测距结果的线性关系Fig.3 Linear relationship of distance measurement results under linear displacement
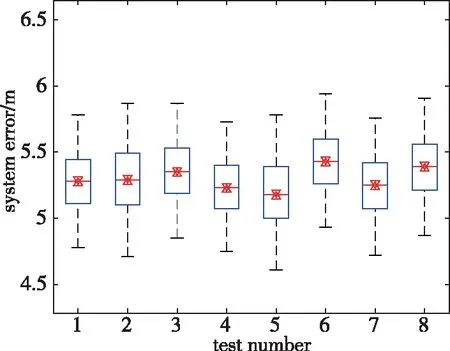
图4 系统误差平均波动关系Fig.4 Average fluctuation relation of system errors
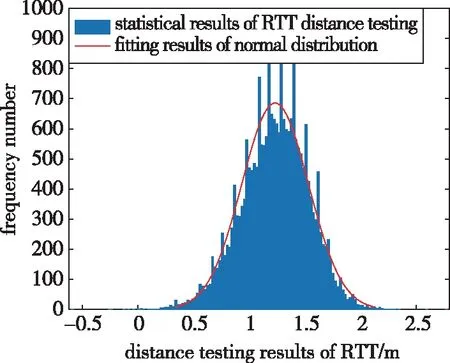
图5 同一位置下多次测量整体数据统计信息及 正态分布拟合结果Fig.5 Overall data statistics and normal distribution fitting results of multiple measurements in the same location
(2)非视距现象对测距结果的影响
设定实验场景与图4环境相同,且装置相距6.4m,选择厚纸箱、木板、锡箔等多种材料作为阻隔层。阻隔层与手机距离以80cm的步进递增,测距均值与阻隔层到手机距离的数据关系如图6所示。多次重复实验发现,测距均值偏离程度与阻隔层所处位置无关。但是,各组数据测距均值维持在1.28~1.29m之间,呈正态分布。随后选择多种阻隔层进行对比试验,分析结果相同。同时处理多次实验数据平均值,所得关系如图7所示,线性拟合结果良好,3条曲线斜率绝对值均小于0.002,证明阻隔层位置不影响测距结果,且有阻隔层情况下测得数据状态与视距状态的测量结果极为相似。根据统计分析可知,数据服从正态分布,相较视距结果,非视距下测得测距均值和标准差会略微增大。此外,图7给出了相同阻隔环境下测距均值存在不重合现象,进一步证实了系统误差的半参数特性。
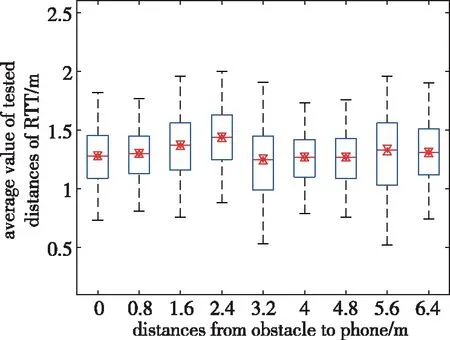
图6 双层纸质障碍物的移动对测距结果的数据影响结果Fig.6 Effect of the movement of the double-layer paper obstacle on the distance measurement results
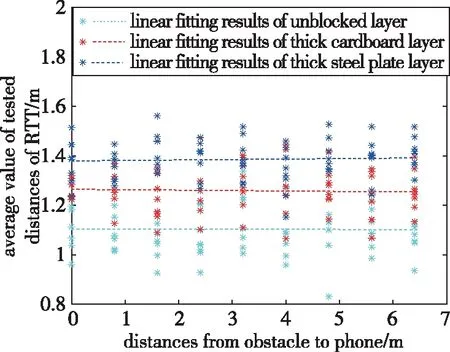
图7 多种阻隔层下WiFi-RTT测量值与实际值对比图Fig.7 Comparison of measured and actual values of WiFi- RTT with various barrier layers
总体来看:阻隔层的材料和厚度一旦被确定,该阻隔层对测距结果的影响就随之确定。阻隔层导致测距结果偏大,同时测距数据不稳定。非视距误差为常值误差,因此可以在定位解算过程中通过对非参数部分的描述来消除非视距的影响。
认为Ibrahim等实验时处于IEEE 802.11mc协议确定初期,所用底层框架及硬件水平偏初级,阴影衰落严重,影响了信号传递质量,使信号强度在两端(接收端和发射端)衰减过快,不能提供良好的测距结果;同时文献[12]中提到:“由于铝板面积较小,无法阻挡整个传播通道,因此在阻隔层靠近路由器/手机时会出现更长的多径传播”。而本文设计阻隔层可以完全阻隔信号传播通道,设计实验不同是本文结论与Ibrahim等所得结果不同的另一原因。此问题尚未被完全解决,需要进一步研究和完善。
(3)多路径效应
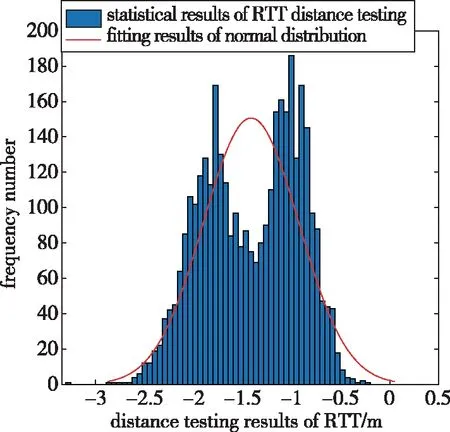
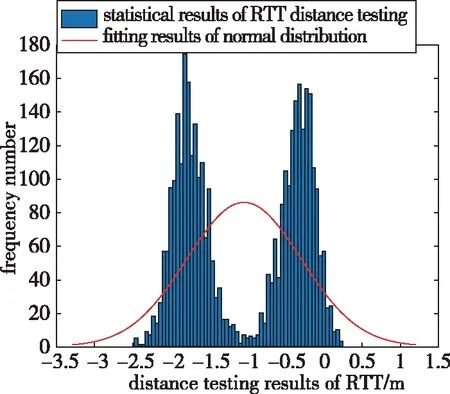
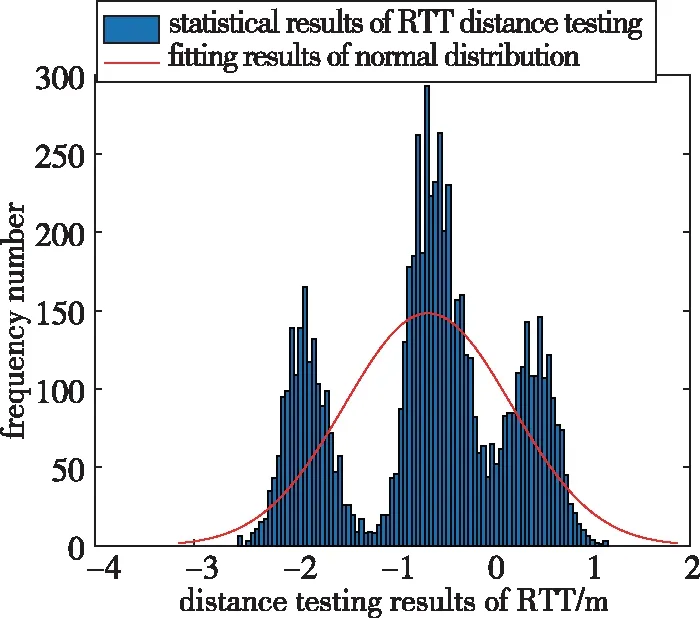
试验设置三种典型的反射场景,其中,场景一是在空旷的环境下进行试验,固定手机和路由器的距离为3.2m,以获得无多路径效应的测距结果;场景二在场景一的基础上,选择相同材质不同高度的木桌(分别为1.4m×0.8m×0.8m和1.4m×0.8m×1.2m)放置于手机与路由器连线中央,以模拟不同反射面对测距结果的影响;场景三在以1.2m高木桌作为反射面的基础上,同时增加墙壁作为反射面,以获得多反射面对测距结果的影响。
(a)场景一
(b) 0.8m高木桌作为反射面
(c) 1.2m高木桌作为反射面
(d)场景三图8 多路径效应对测距结果的影响数据统计图Fig.8 Analysis of the influence of multipath effects on ranging results
图8通过分析不同场景下获得数据的统计结果,描述了多路径效应对测距结果的影响。从图8(a)和图8(b)对比可以看出,多路径效应导致测距结果出现分层,在数据统计分布图上反映为双峰;从图8(b)和图8(c)对比可以看出,随着反射作用的增强,数据偏离程度更加显著;图8(d)反映了多反射面对测距结果的影响:各个反射面对数据结果的影响在统计结果中独立体现,无关联性,在数据统计分布上反映为多峰。由图8中正态分布拟合曲线可以得知,多路径使测距结果均值整体偏大,但视距结果不会消失。因此,在数据后处理中可以通过数据对比,选择最小均值作为视距结果,以减小多路径效应对实验结果的影响。
多路径效应还受到测量距离的影响,如图3所示,数据线性拟合曲线斜率略大于1,说明随着测量距离变长,地面对信号的反射作用逐步明显,测量结果较实际结果偏大,方差有变大趋势。
总体来看:多路径效应影响程度与反射面的材质、反射面到路由器和手机的距离及反射面的数目有关。
(4)测距噪声
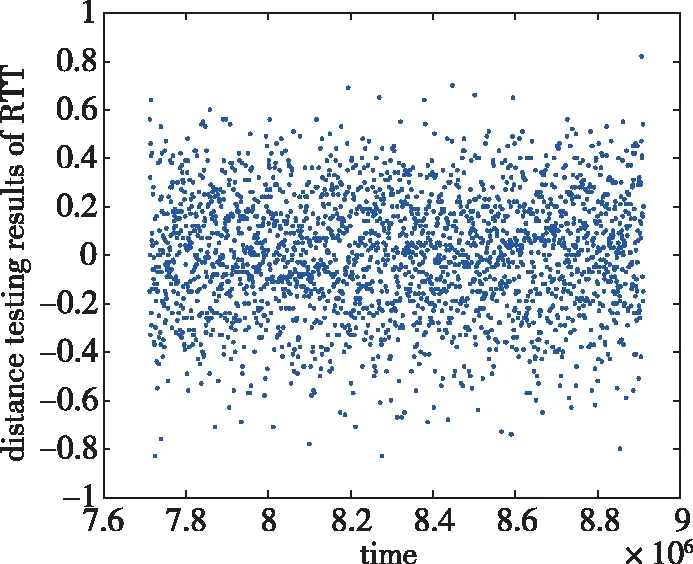
测距噪声是评估测距精度的重要指标,常用标准差(中误差)来反映噪声的大小[23]。试验分成静态测距和动态测距两组。两组实验均在空旷的环境下进行,动态试验中线性增加路由器与手机的距离。每个FTM测距返回值均包括根据N次成功测距结果求得的平均值(即返回的测距结果)和标准差。一定时间内测距结果标准差和每次实验FTM测距返回值标准差均可作为判别噪声的指标。在本实验中选择30min内校准后RTT测距结果标准差(30×60×2=3600个数值结果)和每次FTM测距返回值标准差(单个数值结果)同时作为噪声分析的指标。
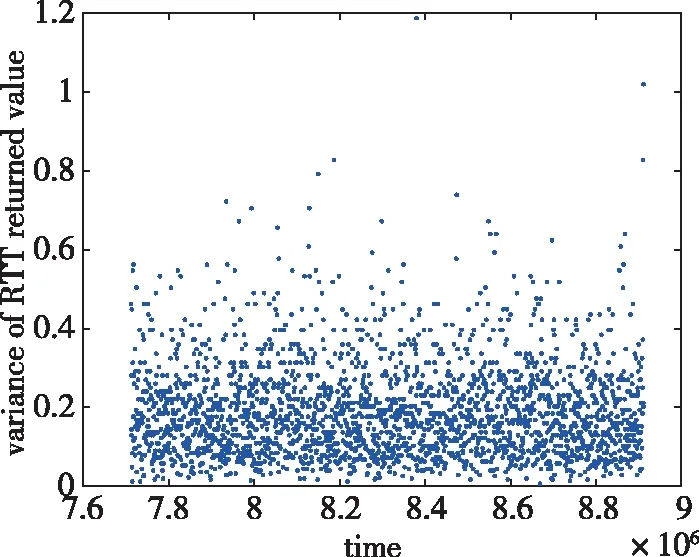
2组数据及方差分布如图9和图10所示。2组数据结果均呈稳定的带状区域,其中,静态结果标准差为0.23m,返回值标准差的平均值为0.42m,方差分布范围较小,集中分布在0.3以下;动态结果的标准差为0.35m,返回值方差的平均值为0.73m,方差分布范围较大。由此证明,动态测距过程中,受到移动方向、摆动以及手机与路由器相对位置的影响,噪声显著增大。
(a)静态数据
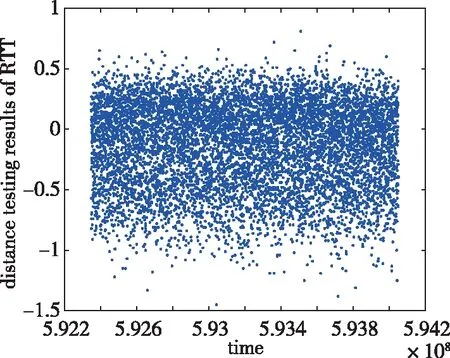
(b)动态数据图9 修正系统误差后RTT测距结果分布序列Fig.9 Distribution sequence of RTT ranging results after correcting system errors
(a)静态数据
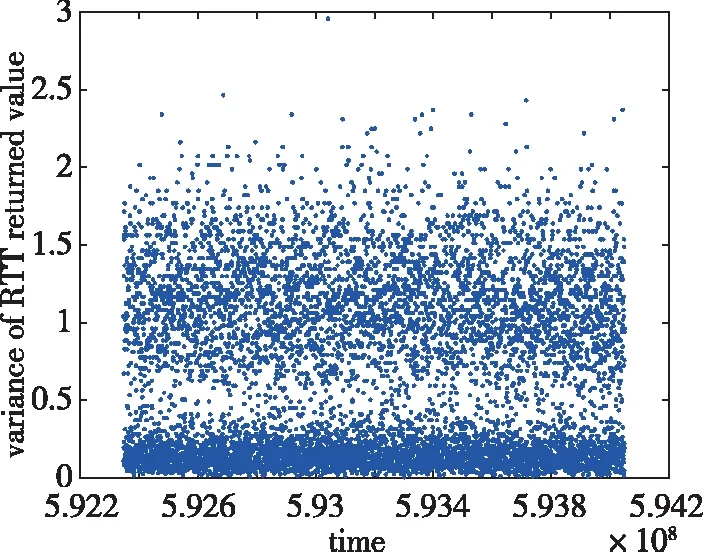
(b)动态数据图10 方差分布序列 Fig.10 Variance distribution sequence
2.3 WiFi-RTT定位精度
WiFi-RTT测距结果因半系统误差和非视距出现定量偏离,半参数模型包括参数和非参数两部分,可以充分利用观测值信息[24],针对此本文提出了基于半参数的WiFi-RTT定位方法。为了评估其精度和可靠性,设计了静态和动态2组试验,同时将其与基于传统最小二乘的定位结果进行对比分析。其中,路由器部署为矩形拓扑结构以更好地接收信号,选择手机与多个路由器同时通信,以尽可能模拟真实状态,如图2所示。
(1)静态试验结果分析
静态试验中采样周期设置为500ms,试验时长为10min。如图11所示,分别给出了基于最小二乘和半参数模型得到的WiFi-RTT定位结果。由图11(a)可知,半参数法定位结果分布更加集中,且定位结果更加精确。由表1可以看出,相较于最小二乘法,半参数法解算结果定位误差更小,准确度有显著提高;X方向和Y方向标准差分别提升了16.1%和12.5%;X方向和Y方向均方根分别提升了18.8%和12.1%。由累积概率分布曲线可以看出,半参数法通过对非参数部分的修正,使得位置偏差明显减小,提高了定位精度。
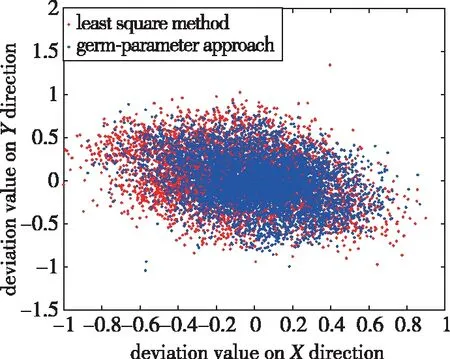
(a)最小二乘法与半参数法解算结果与 实际结果位置偏差对比图
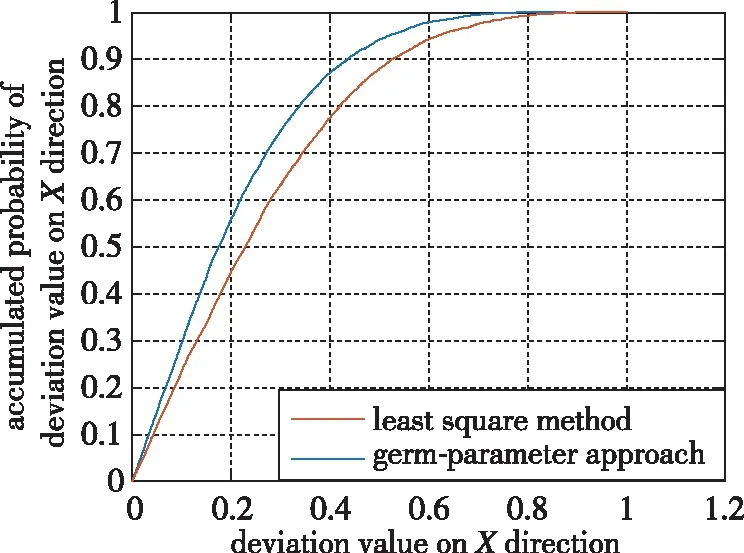
(b) X方向偏差值累积概率分布曲线(CDF)
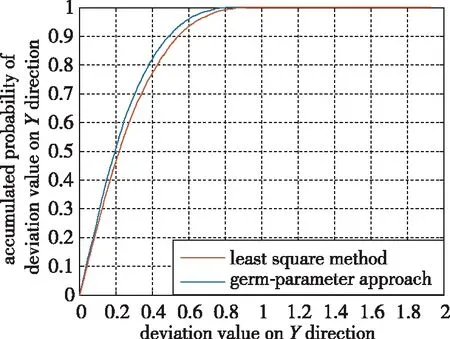
(c) Y方向偏差值累积概率分布曲线(CDF)图11 静态定位,两种解算结果对比图Fig.11 Comparison of the two solutions under static positioning
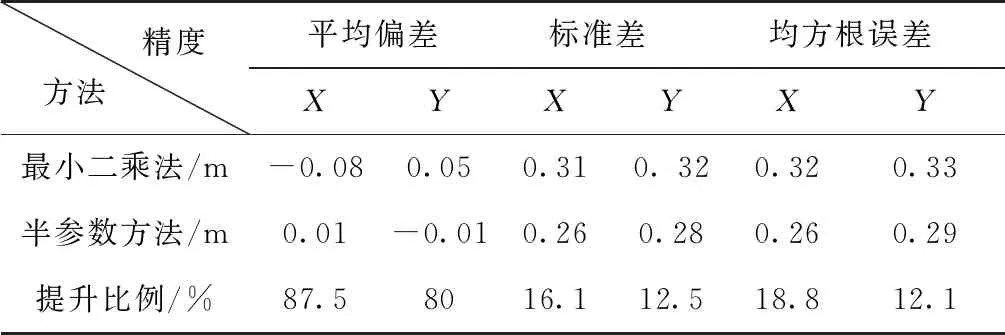
表1 静态定位下,两种解算方式定位精度比较
(2)动态试验结果分析
由于WiFi-RTT测距获得的定位结果是相对位置而非绝对位置,考虑到试验中暂时无法获得数据采集时刻对应的真实位置,因此,选择位置解算结果对已知航迹路线的复现情况作为定位精度评估依据。假设选择在Y方向移动,比较运动状态下X方向定位结果的稳定性及Y轴方向递变规律,以评估运动状态下的定位精度。试验设置两种典型场景,场景一是在如图2(a)所示的试验环境中,沿参考坐标系X轴方向移动,以忽略Y方向移动对结果的影响;场景二与场景一环境相同,方向沿参考坐标系Y轴方向,同时与场景一实验结果进行对比。
两种场景下所得数据位置解算结果如图12和图13所示,可以看出,半参数模型所得定位分布更加集中,定位结果更加精确。由纵向航迹X方向及横向航迹Y方向偏差值累积概率分布曲线可知,半参数解偏差率显著低于最小二乘法。且由表2中数据统计结果可知,半参数解算结果纵向航迹X方向偏差精度提升了50%,标准差和均方根分别提升了52.7%和52.3%;横向航迹Y方向偏差精度提升了46.2%,标准差和均方根分别提升了47.0%和46.6%。因此,将半参数法应用于位置解算可以提高定位精度。
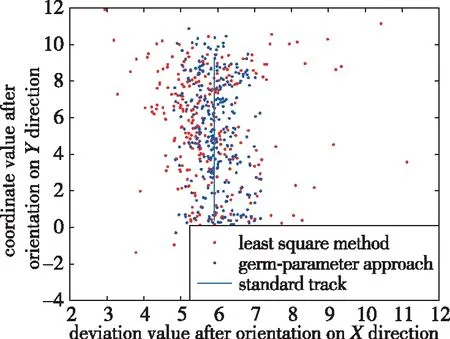
(a)最小二乘法与半参数法解算结果与 实际结果位置对比图
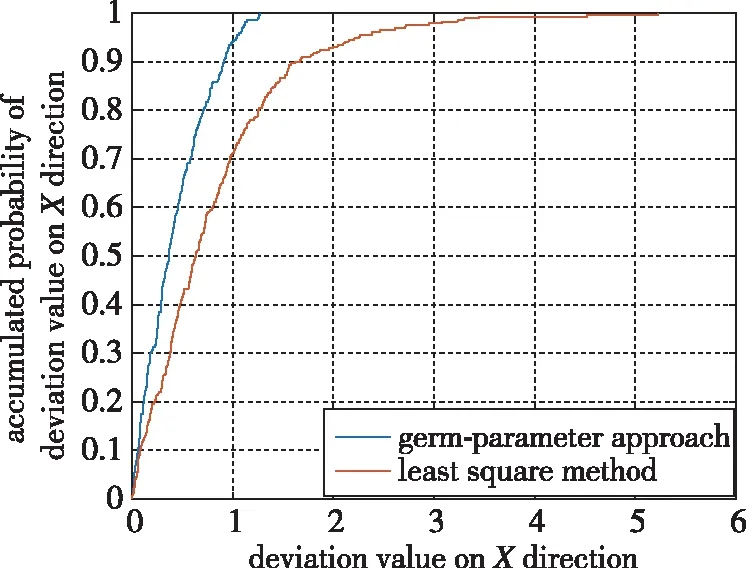
(b) X方向偏差值累积概率分布曲线(CDF)图12 动态定位,两种解算结果对比图(纵向航迹)Fig.12 Comparison of the two solution results (longitudinal track) under dynamic positioning
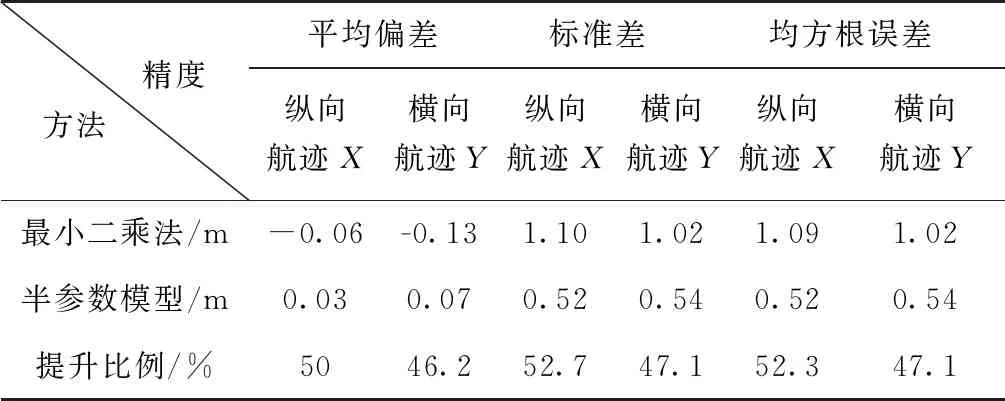
表2 动态定位下,两种解算方式定位精度比较
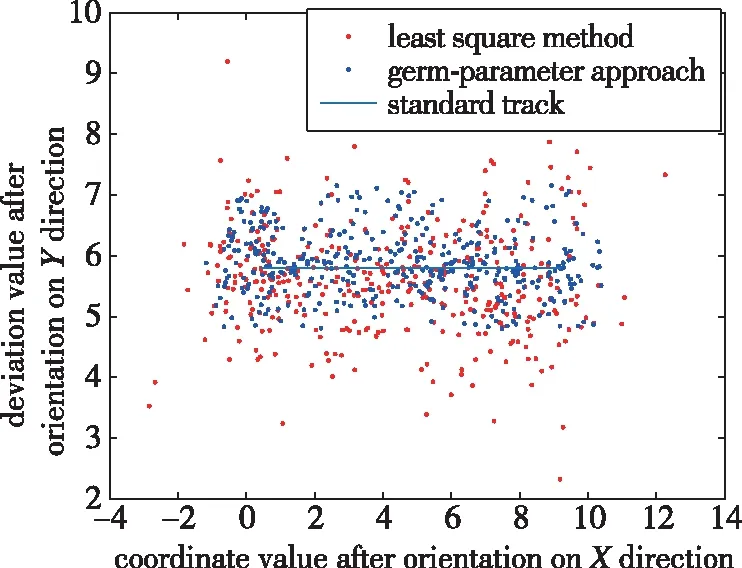
(a)最小二乘法与半参数法解算结果与实际结果 位置对比图
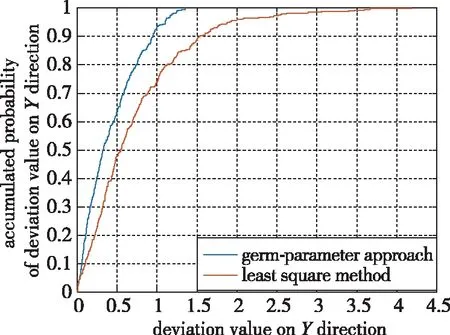
(b) Y方向偏差值累积概率分布曲线(CDF)图13 动态定位,两种解算结果对比图(横向航迹)Fig.13 Comparison of the two solution results (lateral track) under dynamic positioning
需要说明的是,试验中使用滑轮作为工具,行进过程中出现摆动和偏移,在y轴偏差值的数据处理结果中有显著表现。在航迹的两端调整步行状态造成时间延迟,因此两端数据较为聚集,X方向坐标分布曲线两端数据占比较大;此外,手机旋转可能使得测距结果出现变化,两端数据出现一定的漂移和偏离。
3 结论
WiFi-RTT测距功能为基于智能手机的高精度定位提供了新的技术手段。本文针对WiFi-RTT测距误差的特点,提出了基于半参数的WiFi-RTT定位方法,并在室内真实环境下对其定位精度和可靠性进行了评估分析,主要结论如下:
1)WiFi-RTT具有高精度测距能力,测量噪声在0.3m左右;同时,因硬件设备时延、通信协议延迟等造成的系统误差表现出了明显的规律性和随机性,具有典型的半参数系统误差特点。
2)WiFi-RTT非视距误差与阻隔层的材料和厚度密切相关,与阻隔层位于路由器和手机之间的位置关系较弱;同时,WiFi-RTT测量过程中受周围光滑表面反射影响,存在明显的多路径效应,是WiFi-RTT定位方法和应用场景设计中需重点关注的。
3)半参数方法可显著改善WiFi-RTT定位精度,相对于最小二乘方法,静态条件下的定位精度提升约为10%~20%,动态条件下的定位精度提升约为40%~50%;总体上看,WiFi-RTT在静态和动态条件下可分别实现优于0.4m和0.6m的定位精度。
4)需要指出的是,本文中有关定位试验的评估数据仍然较少且环境相对简单,但是,半参数法已经表现出明显优势,后续工作中仍需要开展大量不同场景下的试验分析;动态定位试验中,2个场景下实验用参考坐标系和路由器布局完全一致,实验结果有较大出入,认为路由器布局对定位结果有较大影响,之后将进行路由器布局对实验结果影响的实验,并将给出最佳路由器布局方案。在此基础上,开展与北斗导航信号、惯性等传感器数据的深度融合,形成室内外高精度定位解决方案。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
航天返回与遥感(2021年6期)2022-01-11
全球定位系统(2021年4期)2021-09-14
导航定位学报(2021年4期)2021-08-29
舰船电子工程(2021年1期)2021-02-26
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
中学生理科应试(2017年2期)2017-04-01
