
基于BP神经网络的厘米级超宽带测距误差改正模型设计与实验
2021-09-14 09:30肖庭杨章迪
全球定位系统 2021年4期
肖庭杨,章迪
( 武汉大学测绘学院,武汉 430079 )
0 引言
超宽带(UWB)是一种采用极低功率谱密度和极窄脉冲宽度的无线通信和定位技术,具有穿透能力强、传输速率快和时间分辨率高等优点[1],理论上可以实现cm 级的测距定位. 但由于室内环境复杂,UWB定位受多路径等非视距误差影响较大,这类误差成为制约其定位精度的主要因素.
为提高UWB测距精度国内外学者展开了多方面的研究.文献[2]引入最小二乘残差法对粗差观测数据进行剔除,但不能有效地处理系统误差;文献[3]分析了UWB非视距误差的特性,提出了滑动窗口识别、动态调整噪声参数的卡尔曼滤波算法进行误差补偿,但单独改正效果不显著,需要函数拟合等方法进行进一步改正系统性误差;文献[4-6]利用多项式函数、指数函数等对测距误差进行建模,只考虑了测距误差和测距值之间的相关性;文献[7-10]从信号波形、信号接收强度、量测接收信号的随机性等方面出发,利用小波神经网络、支持向量机等机器学习方法估计测距误差,模型较为复杂;文献[12-14]将UWB与惯性传感器进行组合以削弱非视距误差的影响,需要额外的硬件支持,增加了算法复杂度;文献[11]提出一种神经网络改正模型,将测距值分解为两个分量作为模型输入但忽略了高程改正.
综上所述,现有的UWB 误差改正方法还存在应用范围较窄、改正精度有限和模型过于复杂等问题.基于此,本文建立了适用于三维空间的UWB测距误差BP神经网络改正模型,并且分析比较了两种不同网络结构的模型改正效果.
1 实验原理
1.1 BP神经网络模型
人工神经网络由输入层、输出层和至少一个隐藏层组成,每一层至少由一个神经元组成.BP神经网络能在输入和输出端建立一种非线性的映射关系,算法步骤如图1所示.

图1 BP神经网络算法流程图
1.2 最小二乘定位算法

2 精度评定
2.1 测距精度评定
以测距误差均值和均方根误差(RMSE)评定测距精度,计算方法如式(3)、(4)所示:

2.2 定位精度评定
选取RMSE评定X、Y、Z方向定位精度,如式(5)~(7)所示:

3 实验方案
3.1 实验设备
实验设备如图2所示,UWB 设备采用DecaWave公司的DecaWavePG1.5 套件;全站仪使用Leica MS50,测角精度为1″,测距精度为0.6 mm+1×10−6.

图2 实验硬件设备
3.2 实验场地
实验地点位于8 m×12 m 的室内场地,在4个墙面上各设置1个基站,在地面设置一系列网格点,包括1 个长时间测距点、42个采样点和5个检核点,如图3所示.长时间测距点用于测试测距的稳定性,采样点用于参与BP神经网络训练,检核点用于检验BP神经网络效果.

图3 网格点分布
3.3 实验流程
1)获取坐标及距离参考值
利用MS50全站仪测量各UWB基站和网格点的坐标,并通过坐标反算求得标签与各基站间距离的参考值.
2)测距稳定性测试
将UWB标签置于长时间测距点上,进行采样率为10 Hz、持续50 min 的数据采集,得到30 000历元的数据,对测距稳定性进行分析.
3)网格点数据采集与测距误差分析
利用UWB标签对采样点和检核点进行逐一测量,采样率为10 Hz、持续30 s,每点可获得4×300=1 200个测距值;将测距值减去步骤1)中得到的参考值,对测距误差进行统计分析.
4)网络建模与样本选择
建立两种模型:BP1 模型的输入节点数量为4,

5)模型训练与比较分析
将42 个采样点上的UWB测距值和坐标分别输入两个模型进行训练.5 个检核点的数据不参与训练,用于评价模型的测距误差预测精度;进一步利用改正后的测距值进行定位解算,与参考坐标求差,统计定位精度.在检验BP2时,假定各检核点的参考坐标未知,先利用UWB原始测距值通过最小二乘法得到检核点的概略坐标,输入训练好的BP2网络模型,分别得到其与4个基站间的测距改正值,对4个测距值均进行改正后,再进行最小二乘解算,并代入BP2模型中,重复上述过程,直至坐标变化量小于10−5.一般迭代5~8次后即可收敛.
整体实验设计方案如图4所示.

图4 实验流程图
4 实验结果
4.1 测距稳定性分析
将标签50 min 的连续测距值与全站仪测定的距离值求差,差值序列如图5所示,其与4个基站间距离误差的统计信息如表1所示.由图5可知,测距误差较为稳定.由表1可知,标准差远小于误差均值,即测距误差随时间变化幅度远小于测距误差本身,因此在各采样点上进行30 s的数据采集可以较为真实的反映其测距性能.

表1 长时间测距点上测距误差统计
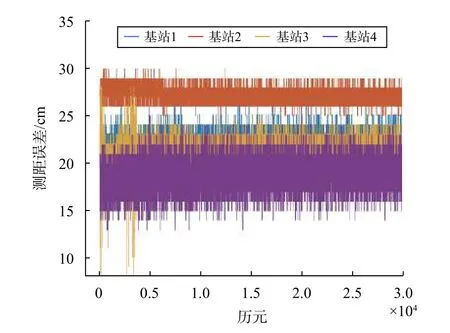
图5 单点测距序列
4.2 测距精度分析
1)测距误差统计
将所有网格点的距离测量值(共计42×300×4=50 400个)与全站仪测得的距离值作差,统计其均值和RMSE,结果如表2所示.

表2 测距误差统计cm
由表2可知,实验使用的UWB测距误差的均值约为26 cm,RMSE值约为20~30 cm,最大可达56 cm,最小为3.2 cm,存在一定的系统性偏差,即总比参考距离要大.这主要是因为受到室内多路径等非视距因素的影响,标签与基站3之间的测距误差明显大于与其他基站间的测距误差,这是因为基站3附近存在一较大反射面(60寸液晶电视屏),非视距误差偏大.
2)测距误差与距离相关性分析
为分析测距误差与距离之间的相关性,以网格点到基站的距离为横轴,对应的测距误差均值为纵轴,绘制散点图,如图6所示.

图6 误差-距离散点图
由图6中可知,测距改正值和距离之间不存在明显的线性相关性.同一基站的测距值,距离大的误差不一定比距离小的误差大,反之可能更小.因此不能简单地在测距值和误差之间建立线性改正模型.
3)测距误差空间相关性分析
以网格点对某一基站的测距RMSE为半径绘制测距误差圆,每一子图对应一个基站,如图7所示.


图7 网格点测距误差圆
由图7可知,对同一基站,不同网格点的测距RMSE 并无明显的空间分布规律,但不同基站间普遍呈现出一定的误差分区现象,只是区域划分各有不同,可见基站和网格点坐标对测距误差均有影响,可将二者同时作为BP神经网络的输入,来拟合这种测距误差的非线性分布.
4.3 BP 神经网络对比分析
4.3.1模型训练效果对比
模型训练结果如表3所示.
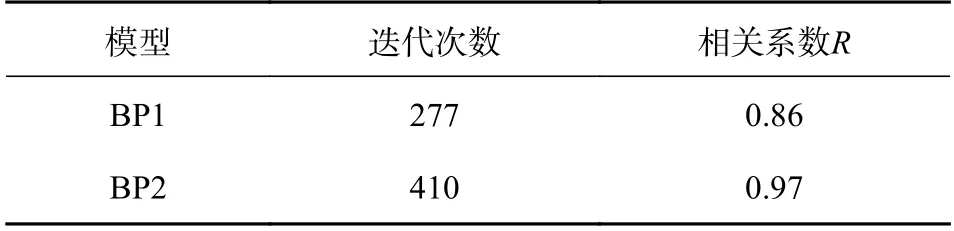
表3 模型训练状态
由表3可知,BP2相关系数比BP1大0.11,更接近于1,这说明BP2有更好的拟合效果.
4.3.2测距改正精度对比
统计得到各测试点上标签与所有基站的测距精度指标,结果如表4所示.由表4中可知经模型BP1、BP2改正后测距RMSE 明显减小,相对于改正前,BP1平均减少83%,BP2平均减少91.7%.

表4 测距精度cm
4.3.3定位精度对比
统计所有测试点改正前后X、Y、Z方向的定位RMSE,统计结果如表5所示.
由表5中可以知,相对于改正前的RMSE,X方向上BP1减少72.7%. BP2减少93.8%;在Y方向上BP1减少73.7%,BP2减少91.2%;在Z方向上BP1减少81.2%,BP2减少96.3%.

表5 测试点定位精度cm
以测试点T1为例,测距值经BP1、BP2改正前后,坐标散点图分布如图8所示,其改正后的X、Y、Z方向误差序列如图9所示.

图8 测试点T1改正前后平面坐标散点图
可以看出,进行误差改正前,定位解算点明显偏离参考坐标;利用BP1、BP2改正后解算点位与参考坐标间偏差均明显减少,且BP2解算点与参考点更加接近、分布更加集中.
从图9中可以看出在T1上,相对于BP1,BP2在Z方向精度提升幅度最大.

图9 测试点T1定位误差序列
5 结束语
UWB测距误差是基站坐标和标签坐标的复杂函数,难以通过常规方法建立精确改正模型.本文作者借助BP神经网络强大的非线性拟合能力,建立了两个不同网络结构的误差改正模型,以高精度全站仪测量结果作为模型训练和对比测试的参考,实验结果表明:两种模型均能有效地改正测距误差,提高定位精度.BP2模型以标签、基站坐标作为输入,相比以4个距离作为输入的BP1模型,改正效果更加明显,三个方向的定位精度均由改正前的dm 级提升至cm 级;且BP2模型的输入不受基站数量限制,使其应用也更为灵活、适用性更强.需要注意的是,改正效果好的前提是室内环境没有明显变化,否则应重新进行参考值测定和模型训练.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
中国新通信(2022年4期)2022-04-23
航天返回与遥感(2021年6期)2022-01-11
导航定位学报(2021年4期)2021-08-29
恋爱婚姻家庭·青春(2019年9期)2019-12-10
恋爱婚姻家庭(2019年26期)2019-09-14
文萃报·周二版(2019年32期)2019-09-10
智富时代(2019年4期)2019-06-01
