
基于实时路况信息的插电式混合动力汽车预测性能量管理算法研究
2020-08-27 07:22陈渠殷承良张建龙秦文刚
汽车技术 2020年8期
陈渠 殷承良 张建龙 秦文刚
(1.上海交通大学,汽车电子控制技术国家工程实验室,上海 200240;2.联合汽车电子有限公司,上海 201206)
主题词:插电式混合动力汽车 预测性能量管理策略 实时路况 能耗分配法
1 前言
能量管理策略是插电式混合动力汽车(Plug-in Hybrid Electric Vehicle,PHEV)的核心技术之一[1]。基于规则的管理策略主要依据工程经验或试验数据反复调试控制阈值,较易实现,鲁棒性好,但依赖于经验水平,且工况适应性差[2]。基于全局优化的能量管理策略,如动态规划(Dynamic Programming,DP)算法,需预知行驶工况信息,且计算时间长,难以用于实车控制[3]。等效燃油消耗最小策略(Equivalent Fuel Consumption Minimization Strategy,ECMS)是一种瞬时优化策略,将电池电量消耗等效为燃油消耗,合适的等效系数可使ECMS作为次优解,获得接近全局最优解的控制效果[4],其关键是最优等效因子的确定。
随着汽车智能化、网联化的发展,汽车部件及系统控制策略可与智能交通系统(Intelligent Transport System,ITS)相结合[5]。将实时车况信息、道路信息及交通信息等整合到PHEV能量管理策略中,可大幅提升工况适应性,从而改善燃油经济性[6]。目前ITS 尚未完全普及,地图开发平台依托大量的车载GPS 接收机、手机位置应用程序(APP)、道路测速仪等传送数据,可使开发者实时获取免费路况信息,所以有必要研究基于现有可实时获取的路况信息的PHEV能量管理算法。
本文以某款P2 构型PHEV 为研究对象,首先从地图开发平台获取相关路况信息,构建能耗分配法规划全局荷电状态(State of Charge,SOC)参考轨迹,建立自适应等效燃油消耗最小策略(Adaptive Equivalent Fuel Consumption Minimization Strategy,A-ECMS)实时跟踪目标SOC参考轨迹实现能量管理,最后采集上海市某段路径实车速度与对应实时路况信息,验证算法有效性。
2 PHEV整车模型
2.1 整车主要参数
本文采用的P2 构型PHEV 整车结构如图1 所示[7],动力及传动系统参数如表1所示。
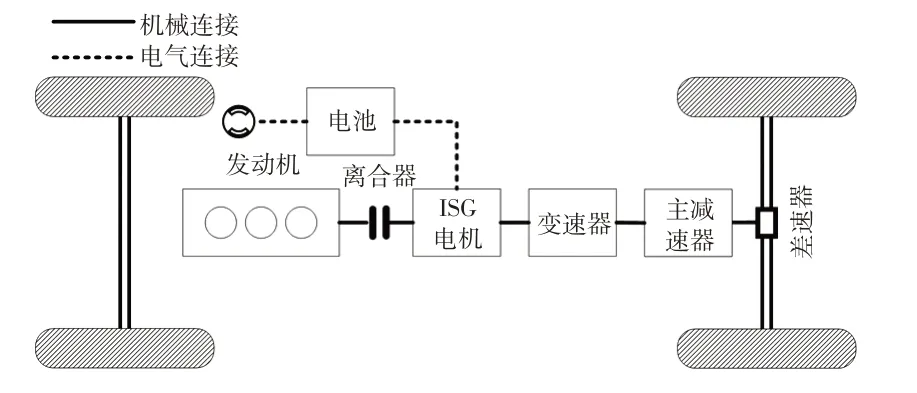
图1 PHEV动力传动系统结构

表1 PHEV整车参数
不考虑车辆的振动和操纵稳定性时,车辆的纵向动力学表达式为:

式中,Tw为需求扭矩;m为整车质量;g为重力加速度;fr为滚动阻力系数;θ为坡道角度;CD为空气阻力系数;ρd为空气密度;A为迎风面积;v为车速;δ为旋转质量换算系数;t为时间;r为车轮滚动半径。
发动机和电机的扭矩和转速关系为:

式中,ηT为变速器与驱动桥的总传动效率;R(i)为变速器第i挡速比与主减速比的乘积;Te为发动机输出扭矩;Tm为电机输出扭矩;Tb为摩擦制动器的制动扭矩;ωw为车轮转速;ωe为发动机转速;ωm为电机转速。
2.2 发动机和电机模型
本文重点研究PHEV的稳态能量管理策略,主要涉及发动机的燃油经济性,在保证精度的同时,为提高仿真模型运行速度并降低运算成本,本文发动机和电机模型均采用查表方式进行建模,分别如图2和图3所示。

图2 发动机有效比油耗特性

图3 电机特性
2.3 电池模型
SOC是整车能量管理的重要变量,直接影响需求扭矩在发动机和电机之间的分配。本文将动力电池简化为如图4所示的等效电路模型,可得:

式中,I为电池电流;U0为电池开路电压;R为电池内阻;Pb为电池充、放电功率;ηm为电池充、放电效率;Q为电池容量;SOC(k)为k时刻荷电状态。当电机输出扭矩Tm≥0 时,电池处于放电状态,当Tm<0 时,电池处于充电状态。

图4 电池模型
3 预测性能量管理算法
3.1 SOC轨迹规划
3.1.1 路况信息获取
地图服务供应商依托终端设备回传的数据可实现路况信息的1 min 更新和100 m 精度表达,而开发者可使用的路况信息为1 min 内平均路况信息,可较精准地反映实时交通路况。本文基于国内某地图服务供应商的Web 服务应用程序接口(Application Programming Interface,API),通过超文本传输协议(HTTP)或超文本传输安全协议(HTTPS)请求获取实时路况信息。
如图5 所示,起点O到终点D称为路径,一条路径可以根据不同的道路名称划分成不同的一级路段,每个一级路段又根据不同拥堵等级(畅通为1,缓行为2,拥堵为3,严重拥堵为4,将其定义为路况指数)划分成不同的二级路段。开发者可使用的路况信息包括路径和一、二级路段的行驶距离和时间,以及二级路段路况指数。
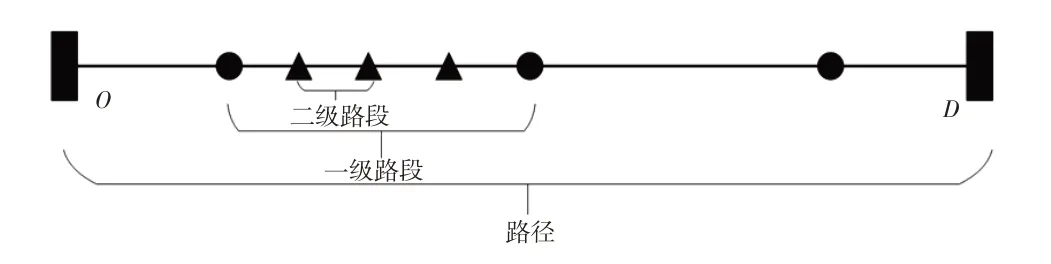
图5 路况说明
以联合汽车电子有限公司为起点,上海交通大学(闵行校区)为终点获取的路况信息如图6 所示,含有9个一级路段和181个二级路段。第y个一级路段的平均速度为:

式中,sy、ty分别为地图平台返回的第y个一级路段的距离和时间。
3.1.2 能耗分配法
本文仅研究剩余电量无法满足纯电动行驶全部里程的情况。文献[8]表明,混合模式与电量消耗-电量维持(CD-CS)模式相比,能够在相同的油耗水平下使用更少的电池能量。其他学者基于SOC跟随的实时控制算法中,所跟随的SOC轨迹基本为基于里程线性变化的SOC参考轨迹[9-11]。

图6 路况信息
文献[12]表明,SOC的下降趋势与速度具有明显的正相关性。由于电机的效率区间比发动机大,所以PHEV 在实际控制过程中,在满足功率需求的前提下,希望拥堵路段利用纯电动行驶,高速路段起动发动机使用混合模式运行。本文提出能耗分配法规划全局SOC参考曲线,根据路况信息对电量进行全局分配,在拥堵路段分配更多电量使用纯电动行驶。结合式(1),分配思路如下:
a.根据路段平均速度平方与距离的乘积,反比例分配电量:

式中,ΔSOCtotal为电池剩余SOC;SOCstart、SOCend分别为路径起点、终点SOC;ΔSOCk1为第k个二级路段根据路段平均速度平方与距离的乘积反比例分配的电量;n为二级路段的总数;sk、vˉk分别为第k个二级路段的距离和平均速度。
当距离相同时,路段k平均速度越小,分配电量的占比越大,车辆更倾向于纯电动行驶。
b.根据路况指数与距离的乘积,正比例分配电量:

式中,ΔSOCk2为第k个二级路段根据路况指数与距离的乘积正比例分配的电量;ck为第k个路段的路况指数。
当距离相同时,路段ck越大,分配电量占比越大,车辆更倾向于纯电动行驶。
c.按比例调节分配的总电量:

式中,ΔSOCk为第k个路段分配的总SOC;α1和α2分别为平均速度和路况指数的能耗分配系数,可以采用遍历的方法规划最优SOC轨迹。
3.2 A-ECMS算法
ECMS算法在每个时刻t使发动机的实际油耗率(根据发动机稳态模型插值求得)和电动机消耗电量的等效油耗率的总和最小[13]。
本文建立自适应等效因子s(t)计算:

式中,Hlhv为汽油质量热值常数;ηdis和ηchar分别为电池充电和放电效率;s0为等效因子常数部分;kp为比例系数;kI为积分系数;SOCref(t)为当前时刻SOC目标值;SOC(t)为当前时刻SOC。
由式(13)、式(15)可知:当SOC(t)>SOCref(t)时,等效因子减小,在满足需求功率的条件下增大用电量;当SOC(t)<SOCref(t)时,等效因子增大,在满足需求功率的条件下发动机发电,保证工作在高效区间;当SOC(t)=SOCref(t)时,即ΔSOC=0时,等效因子不变,保持上一时刻的控制策略。
系统约束条件为:
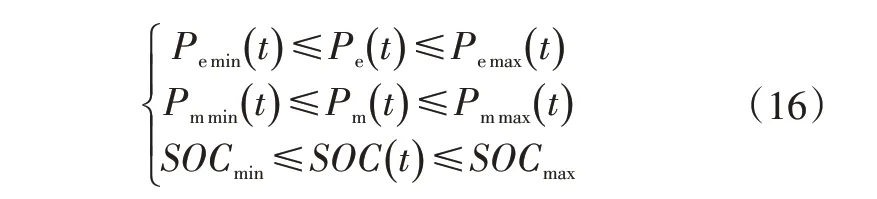
式中,Pemin(t)、Pemax(t)分别为t时刻发动机最小和最大扭矩;Pmmin(t)、Pmmax(t)为t时刻电机最小和最大扭矩;SOCmin和SOCmax为电池最小和最大SOC约束。
4 仿真分析
4.1 测试工况采集
通过车辆车载自动诊断系统(On Board Diagnostics,OBD)接口采集实车速度,每5 min 记录路况信息,且新数据覆盖之前未行驶路段的路况数据,如图7 所示。t0时刻车辆位于起点O,保存起点O到终点D的路况信息,5 min 后的t1时刻车辆行驶到O1处,更新O1到终点D的路况信息,以此类推,直至车辆到达终点。某次采集的实际车速和路况信息如图8所示。
从图8 可以看出:路段平均速度相同时,路况指数变大,实际行车速度下降,说明出现拥堵;平均速度不相同的两个路段,平均速度较小的路段对应的实际车速较小。结合路况指数和平均速度可较好地预测实际行车速度,为能耗分配法提供了理论基础。

图7 路况信息更新说明
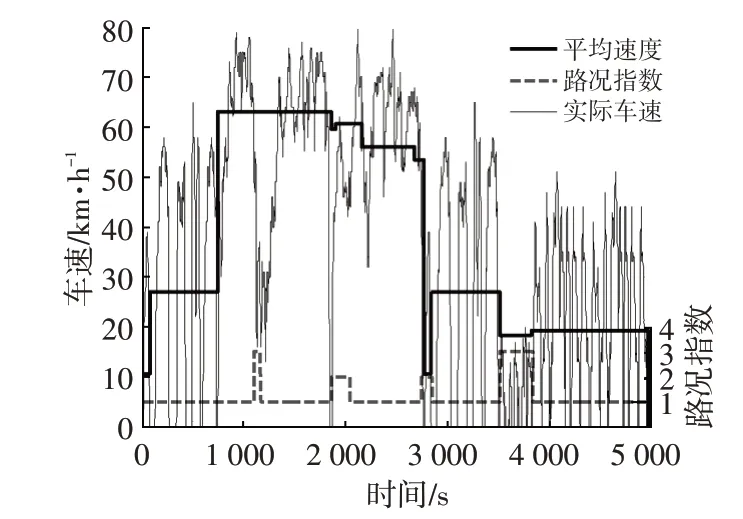
图8 仿真工况
4.2 仿真及结果分析
基于地图信息的PHEV 预测性能量管理策略控制流程如图9 所示,其中vref为实际车速,β、γ分别为油门踏板和制动踏板开度,分别为最优的发动机扭矩和电机扭矩。以地图开发平台实时路况信息作为能耗分配法的输入,规划全局SOC参考曲线,输入等效因子自适应模块,根据当前SOC与规划SOC的差值,实时调整等效因子s(t),最后基于A-ECMS 控制策略完成仿真验证。当平均速度能耗分配系数α1=0.6 时,可得最优结果。

图9 控制策略流程
能耗分配法规划的全局SOC参考曲线与真实SOC曲线对比如图10 所示。在低速阶段,能耗分配法规划的SOC下降斜率绝对值大于高速段,能分配较多的电量,且SOC参考值小于真实SOC值,经过自适应控制模块,等效因子减小,在满足需求功率的条件下尽可能以纯电行驶;在高速阶段,SOC参考值大于真实SOC值,等效因子变大,在满足需求功率的条件下发动机发电且保证工作在高效区间。结果表明,能耗分配法利用地图信息规划的全局SOC参考轨迹可以在低速和高速区间合理分配电量,同时,真实SOC曲线与全局SOC参考轨迹变化趋势保持一致,说明A-ECMS算法可较好地跟踪目标SOC轨迹,按预设电量分配情况进行控制。

图10 SOC轨迹
图11 和图12 所示分别为CD-CS 策略和A-ECMS算法的发动机扭矩随时间变化曲线。传统CD-CS策略先进入电量消耗模式,当SOC减小到临界值再起动发动机进入电量维持模式,造成整车燃油经济性较差。能耗分配法根据路况信息提前进行全局电量分配,确保低速阶段有充足电量进行纯电动行驶,在高速阶段,分配的电量较少,进入混合模式驱动车辆,确保发动机工作在高效区,提高了整车燃油经济性。图13 所示为发动机工作点分布MAP图,与CD-CS策略相比,A-ECMS策略有更多工作点分布在最佳效率曲线内。

图11 CD-CS算法发动机扭矩

图12 A-ECMS算法发动机扭矩

图13 发动机工作点分布
CD-CS、A-ECMS 和DP 策略仿真结果如表2 所示。分别用线性SOC、能耗分配法规划的SOC和DP 求得的最优SOC轨迹作为SOC参考曲线对A-ECMS 进行仿真。以能耗分配法规划的全局SOC轨迹为跟踪目标虽相较于DP算法的燃油消耗量优化效果下降了2.63%,但DP算法需要提前获取实车路谱,无法满足实时性要求。

表2 不同策略百公里油耗对比
5 结束语
本文设计了基于实时路况信息的PHEV 预测性能量管理算法。首先根据实时路况信息建立能耗分配法规划全局SOC参考轨迹,预测每个路段的电量分配,然后建立A-ECMS 策略,以真实SOC值与SOC参考值的偏差作为PI控制的输入,自适应调整等效因子,使真实SOC跟随目标SOC参考轨迹实现能量管理。最后以上海市某段路径行驶工况数据进行仿真,结果表明:全局SOC参考轨迹可在低、高速路段合理分配电量,真实SOC轨迹与SOC参考轨迹变化趋势保持一致,该策略燃油经济性较CD-CS 策略提高7.65%,接近DP 全局最优解。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
军事文摘(2022年16期)2022-08-24
记者摇篮(2018年7期)2018-10-30
记者摇篮(2018年7期)2018-10-30
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
客户世界(2013年5期)2013-08-05
移动通信(2011年23期)2011-02-06
