
基于主客观试验的汽车A柱区域视野权重研究
2020-08-27 07:22李春雨杨春朝钱方余潮锋华波
汽车技术 2020年8期
李春雨 杨春朝 钱方 余潮锋 华波
(广州汽车集团股份有限公司汽车工程研究院,广州 511434)
主题词:A柱动态视野 眼点分布 回归分析 层次分析 权重系数
1 前言
目前,A柱视野研究主要基于静态工况主观评价试验[1-3],存在一些局限性:不能很好地反映实际驾驶时动态工况下的A 柱视野;将A 柱视野作为整体研究,缺少对细分区域视野的研究,不利于视野的优化设计;与A柱视野相关的客观眼点分布数据匮乏,缺乏A柱视野眼点分布规律的研究。
本文参考实际道路行车环境,设计能够反映实际道路环境的动态试验场地和试验工况,提出动态眼点采集和A柱视野主观评价试验方法,并结合9款量产车的客观动态眼点采集和主观评价试验确定A 柱视野的重点关注区域,分别采用基于主观评价数据的线性回归和基于专家评价的层次分析方法得到A 柱细分区域视野的权重,对权重系数进行进一步组合优化,以期为A 柱视野的细化设计提供帮助。
2 动态视野主客观试验设计
2.1 动态视野试验场地
实际驾驶过程中,人、车与道路环境为动态环境,道路环境影响着驾驶员的驾驶视野,为了能够更好地模拟真实驾驶时的路况,参考城市道路设计标准,考虑试验场地限制,在20 m×20 m 的圆形平坦水泥场地内,设计了包含直行、左转、右转和掉头工况的试验场地,如图1a所示。
由于行人和障碍物的存在,驾驶员在驾驶过程中会时刻观察行人状态和动向。参考中国成年人和儿童身高情况[4],试验中采用直径0.5 m、高0.6 m的圆桶堆积的方式模拟道路环境中的儿童(2 个圆桶堆积)和成人(3个圆桶堆积),如图1b所示。

图1 动态试验场地示意
2.2 动态眼点分布试验
眼点采集试验使用的设备是德国Ergoneers 公司的Dikablis Essential Glasser 3.0眼动仪,该设备能够记录驾驶过程中驾驶员眼睛注视点的分布位置,用于研究驾驶员的眼点分布特征,其采样频率为100 Hz,眼点定位精度高,头戴装置小巧轻便、佩戴舒适,不影响驾驶员的驾驶行为,符合动态眼点分布试验的要求。眼动仪佩戴和采集结果如图2所示。
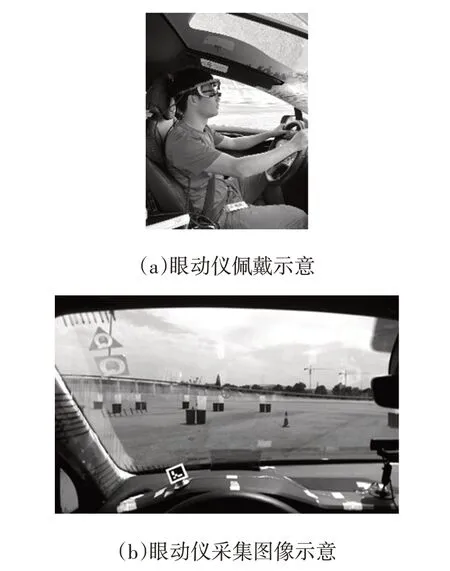
图2 眼动仪采集设备及结果
选取3 款量产车型,车辆代号分别为1、2 和3,3款车具有不同的A 柱造型风格,左侧A 柱视野如图3所示。

图3 试验车型左侧A柱视野
10名被试者均为身体健康的熟练驾驶员(3年以上驾龄),且身高均匀分布在161~183 cm 范围内,年龄在22~35岁之间,如表1所示。

表1 动态眼点采集试验被试者信息
试验开始前,对试验场地进行封场,避免场地内有其他车辆和行人影响驾驶员驾驶时的视野。被试者坐在试验车内,并调整至舒适坐姿,完成眼动仪设备的佩戴和标定,了解行驶路线并能够按照平时驾驶习惯正常驾驶后开始动态眼点采集。试验开始后,首先在图1b障碍物摆放位置摆放1.8 m高的障碍物,依次进行直行、掉头、右转、左转4 个工况的行驶,每个工况重复行驶3次。更换1.2 m高的障碍物再次进行试验。
2.3 A柱细分区域主观评价试验
主观评价量表设计:为了全面细致地研究A柱各细分区域的视野,将A柱区域划分为5个细分区域,如图4所示。

图4 A柱视野区域划分示意
采用语义细分的10点评价法[5],将各区域视野的优劣分为0~10 分的11 个评分等级,每2 个分值等级确定一个语义描述,如表2 所示,主观评价评价项目和标准如表3所示。
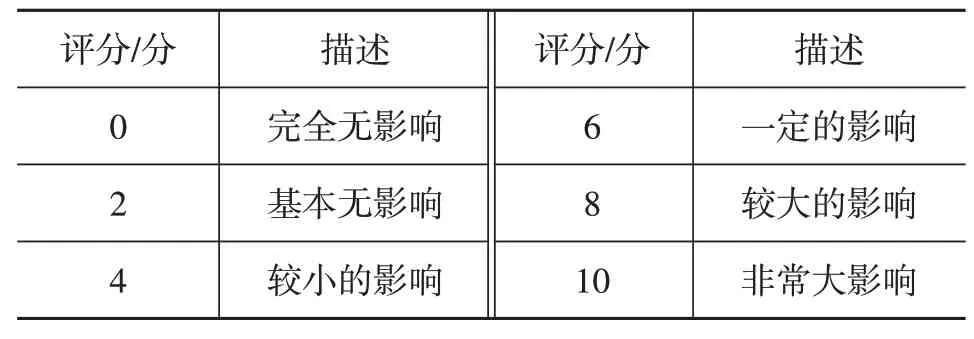
表2 语义细分评分描述
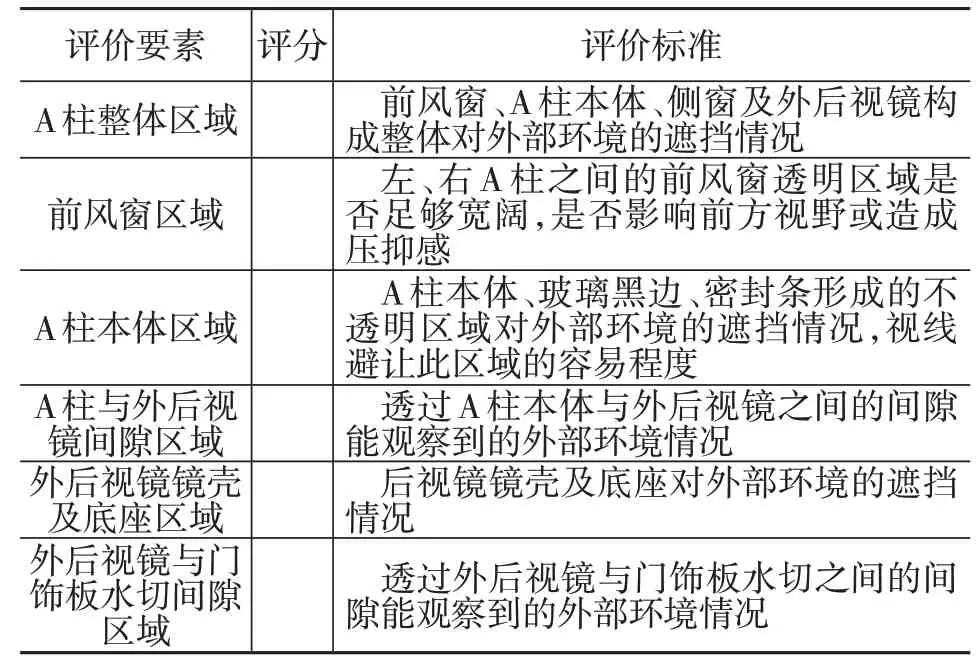
表3 A柱动态视野主观评价量表
主观评价试验被试者增加为25 人(包括眼点采集试验的10名被试者),试验车型增加至9款量产车型(包括眼点采集试验的3 台车),主观评价试验的驾驶流程与动态视点分布试验一致。待被试者完成所有车辆试驾后,统一进行主观评价并填写主观评价量表。
3 主、客观试验结果分析
3.1 客观动态眼点采集试验结果分析
动态眼点采集试验共采集到10 名被试者3 台试验车辆的眼点数据26.1万个。驾驶时左侧A柱盲区更大,因此本文主要研究左转和掉头工况下A 柱各区域的眼点分布情况,各细分区域的眼点分布权重如表4所示。

表4 左侧视野A柱细分区域眼点分布权重%
从表4 可以看出,左转和掉头工况下眼点在前风窗区域、A 柱本体区域,以及A 柱与后视镜视觉间隙区域的分布最多,说明驾驶员在驾驶过程中眼点主要集中在上述区域,因此将其作为A 柱视野设计的重点控制区域。
3.2 主观评价试验结果分析
9 款车型25 人次的主观评价试验共得到主观评价数据225组。对主观评价试验数据进行筛选,剔除评价数据完整性差、敏感性差(所有项目评分全部为某一分值)和存在明显异常值的低质量评价数据,共得到175组数据。相关分析是确定2个或2组变量之间的相关关系和相关密切程度的统计分析方法。对主观评价175组数据进行皮尔逊相关分析,采用双尾检验对相关关系的显著性进行验证,显著水平α=0.01,如果给定显著水平下的双尾检验值sig<α,则认为2 个变量之间相关显著。A 柱整体评价结果与A 柱各细分区域评价结果相关系数如表5所示。
由表5 可知,A 柱整体视野与5 个细分区域视野均表现出显著的相关性。其中,A 柱与后视镜间隙视野、后视镜镜壳及底座视野、后视镜与门饰板间隙视野三者之间的相关系数均在0.6 以上,具有很强的相关性,可以对其简化,选择其中一个来描述A 柱整体视野。结合动态眼点分布结果,A柱与后视镜间隙视野为A柱视野的重点关注区域,因此选择前风窗视野、A 柱本体视野、A柱与后视镜间隙视野作为A柱整体视野的重点控制区域。
4 A柱各区域权重因子分析
4.1 基于主观评价数据的线性回归方法
为进一步得到局部区域视野与A 柱整体视野的关系,选择前风窗视野、A 柱本体视野和A 柱与后视镜间隙视野作为局部变量,进行整体视野的线性回归分析[5],结果如表6所示。
表6 中的标准化回归系数即为A 柱各区域视野对整体视野的权重系数,则各局部区域视野与整体视野的近似回归方程为:

式中,S为A 柱整体视野主观得分;S1、S2、S3分别为前风窗视野、A 柱本体视野、A 柱与外后视镜间隙视野主观评价得分。
4.2 基于专家评价的层次分析方法
层次分析法是一种系统分析方法,它适用于对结构错综复杂、模糊不清的相互关系的定量分析[6-10]。选择专家3人(均具有10年以上汽车人机工程学开发经验),对因素1前风窗视野、因素2 A柱本体视野、因素3 A柱与外后视镜间隙视野进行两两比较并打分,以表征两因素对于A 柱整体视野的相对重要程度,bij表示因素i对因素j的相对重要性数值,通常取1~9 及它们的倒数作为标度进行标值量化,判断规则如表7所示。所有因素进行两两比较判断后得到判断尺度值,构造出比较判断矩阵。3位专家的判断矩阵如表8~表10所示。

表5 A柱整体视野与各区域视野相关系数

表6 A柱整体视野与A柱局部视野的回归系数

表7 层次分析法判断规则
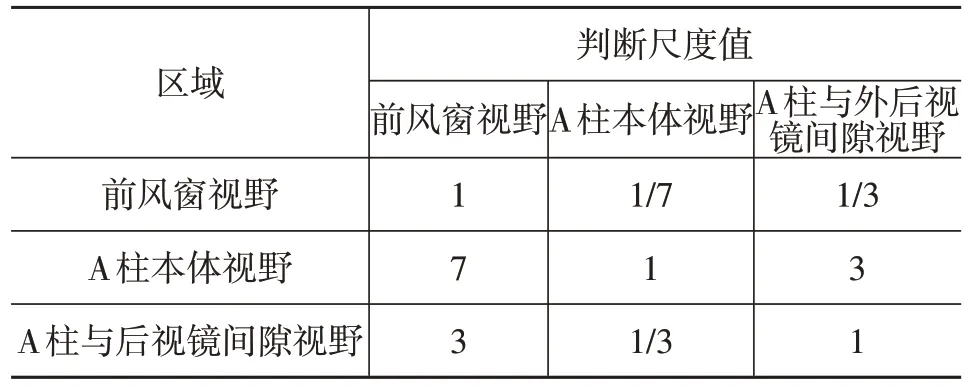
表8 专家1 A柱细分区域各指标判断矩阵
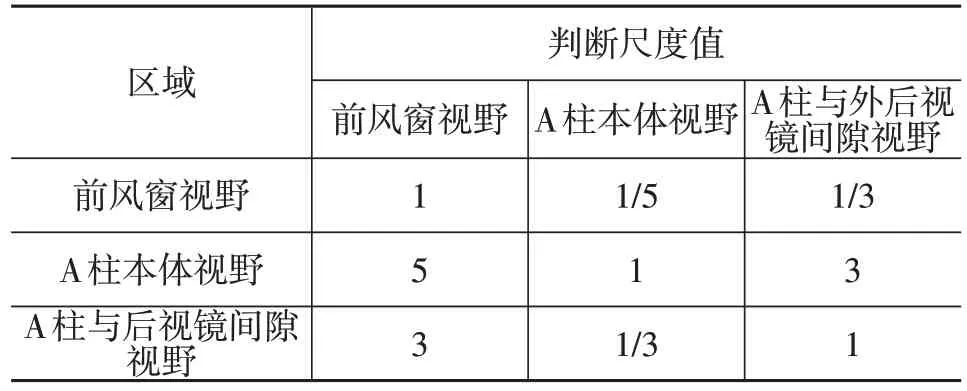
表9 专家2 A柱细分区域各指标判断矩阵
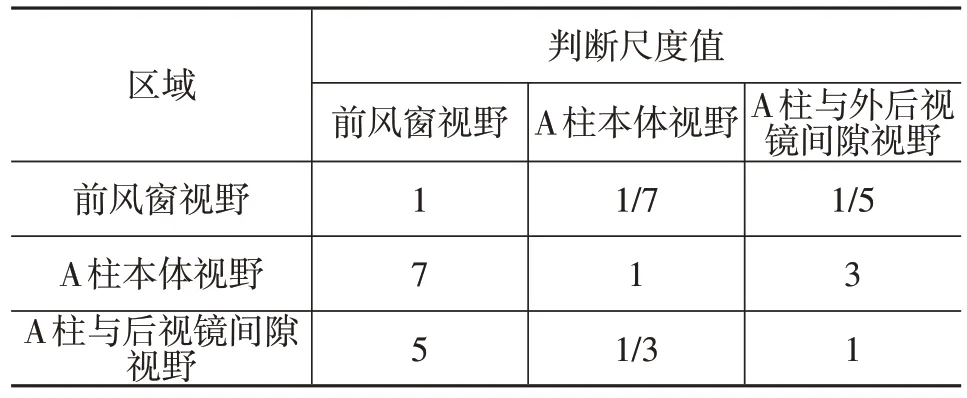
表10 专家3 A柱细分区域各指标判断矩阵
利用各位专家的判断矩阵对A 柱视野细分区域各权重因子进行计算。通过判断矩阵计算权重因子的具体步骤为:
a.对判断矩阵的列元素进行归一化计算:

b.将按列归一化后的元素按行相加计算:

c.将按行相加计算得到的列元素归一化计算,即得到各因素对应的权重wi:

判断矩阵中元素的确定是根据专家意见比较得到的,带有主观性,因此要对其一致性进行检验,其定义为:

式中,CI为一致性指标;λmax为判断矩阵的最大特征根;n为矩阵阶数;RI为同阶一致性指标,查表11获得。
当CR<0.10时,判断矩阵具有可接受的一致性。

表11 同阶平均随机一致性指标
根据3位专家的权重判断矩阵,权重系数和一致性系数如表12所示。

表12 权重系数和一致性系数
3位专家的判断一致性系数均小于0.1,均具有较好的一致性,取3位专家各指标的平均值作为最终权重:

4.3 组合权重系数优化
为了提高A柱各区域权重系数的准确度,通过对2种方法确定的权重系数结果进行线性组合的方式对权重系数进行进一步优化:

式中,A为第一组合因子;B=1-A为第二组合因子。
为了降低优化过程中的振荡,消除数据的差异性,以9 辆车主观评价平均结果为基础进行回归寻优和误差判定,主观评价均值如表13所示。
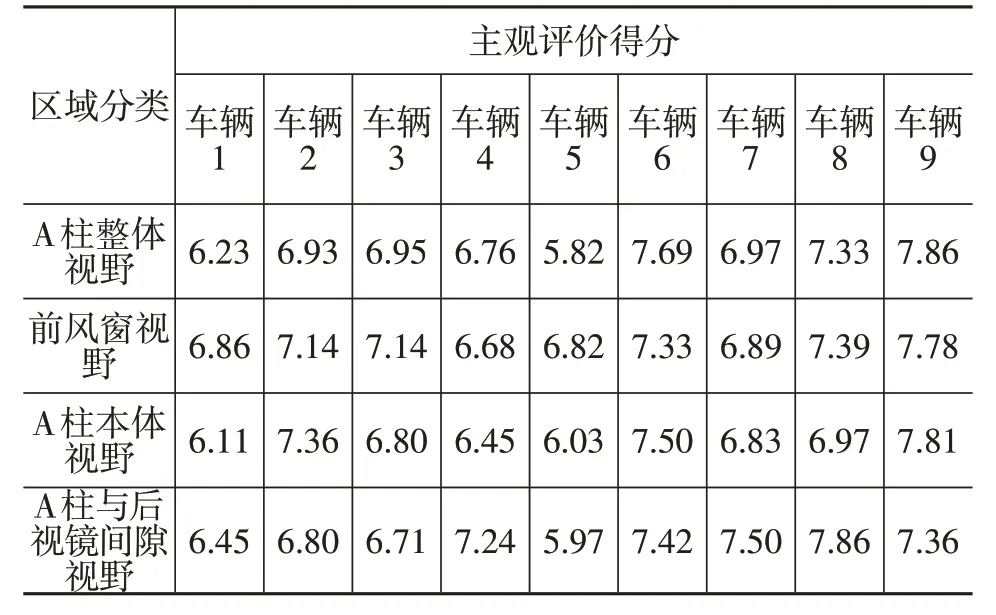
表13 各试验车的主观评价得分均值 分
用平均绝对百分比误差e来表示各种方法训练集和测试集的预测误差,从而进行优化前、后预测效果对比。其计算公式为:

式中,Yi为试验值;为预测值;N为样本个数。
选取步长0.001 对A的取值进行优化,误差值与A的变化关系如图5所示。

图5 误差值e与组合因子A的关系
由图5可以看出,基于主观评价数据的线性回归方法和基于专家评价的层次分析方法的平均误差值均小于5%,说明本文的两种权重因子确定方法均有很高的准确度,且取组合因子A=0.236 时,误差值e最小,较优化前两种方法的误差均有所减小,此时前风窗区域视野、A 柱本体区域视野、A 柱与后视镜间隙区域视野的权重分别为13.1%、56.5%和30.9%。因此,A柱整体评分与各细分区域评分的线性回归方程为:

5 结束语
本文结合实际道路环境和工况设计了动态视野的试验场地,并提出了A柱细分区域动态视野眼点采集和主观评价试验的方法,通过A柱区域动态眼点采集试验确定了左转、掉头工况下A 柱视野的重点关注区域,分别基于主观评价数据的线性回归方法和基于专家评价的层次分析方法确定了A柱细分区域视野的权重系数,并组合两种方法的权重结果,对权重系数进行了优化。
本文对A柱细分区域视野的研究成果,可以为汽车A柱视野设计提供参考。
猜你喜欢
消费电子(2022年6期)2022-08-25
心理学报(2022年5期)2022-05-16
华人时刊(2020年19期)2021-01-14
当代陕西(2020年17期)2020-10-28
华人时刊(2020年23期)2020-04-13
小资CHIC!ELEGANCE(2019年33期)2019-11-22
参花(上)(2019年2期)2019-02-14
人大建设(2018年5期)2018-08-16
世界博览(2018年11期)2018-06-11
证券市场红周刊(2018年3期)2018-05-14
