
视觉失效条件下车道保持辅助控制策略研究*
2020-08-27 07:22任泽凯郑继虎赵帅张鲁翟洋
汽车技术 2020年8期
任泽凯 郑继虎 赵帅 张鲁 翟洋
(1.中国汽车技术研究中心有限公司,天津 300300;2.陆军军事交通学院,天津 300161)
主题词:视觉失效 控制策略 功能安全 车道保持辅助 硬件在环
1 前言
车道保持辅助(Lane Keeping Assist,LKA)系统是利用视觉感知技术[1]实时监测车道线位置,通过先进控制算法保证车辆在车道内稳定行驶的先进驾驶辅助技术,是自动驾驶车辆横向控制的基础[2]。
LKA 系统对视觉感知传感器的依赖程度很高,感知传感器的失效则有可能引起严重的安全问题[3]。自动驾驶感知类传感器失效主要表现为两种形式。一方面,感知类传感器受环境影响较大[4],在恶劣环境下容易误识别、漏识别,视觉传感器在强逆光[5-6]、夜间[7]、雾霾天气[8]、雨雪天气[9]和相机镜头被雨雪遮挡等特殊情况下容易感知失效。另一方面,自动驾驶感知传感器受温度、湿度、电磁环境等因素的影响,存在一定的设备故障率,同样有可能造成视觉感知失效。
国内外许多专家、学者在预防或降低传感器失效方面进行了大量的研究。吴利刚等[10]指出环境可能造成传感器失效,为此研究了传感器失效条件下的非线性自主车辆编队控制问题,提出的非线性车队切换控制算法保证了良好的控制效果。成春阳[11]、Florian Homm[12]等对车道线检测方法进行了设计,降低了车道线检测失效的风险,但是增加了设备成本,不利于大规模推广使用。吴彦文等[13]提出了一种基于视觉传感器与车道级高精度地图相融合的车道线检测与跟踪方法,但高精度地图信息受限于法律与安全,在世界范围内还没有得到大规模应用。Shuang Huang[14]、苗丰[15]等通过传感器的冗余设计降低了风险发生的可能性,但增加了车辆成本,目前只在在油门踏板等关键传感器上得到了应用。王俊明等[16]基于ISO 26262进行了车道保持辅助功能的设计,指出LKA 系统不宜在大雨、大雪天气下工作,工作时视觉感知相机不能被遮挡等,但并没有考虑LKA系统在正常工作状态下突发故障时应如何响应,也没有进行具体安全性验证。
为了在不增加额外成本的情况下,充分利用现有传感器提升车辆安全等级,本文针对某搭载单目视觉传感器和毫米波雷达的自动驾驶车辆进行LKA系统在视觉失效条件下的控制策略研究,以期最大程度地提高车辆的安全性能。
2 视觉传感器失效后控制策略
2.1 场景的提出
针对某配备单目相机与前置毫米波雷达的L2级自动驾驶车辆,假定车辆在高架桥、高速公路等结构化道路上正常跟车行驶,执行LKA 与自适应巡航(Adaptive Cruise Control,ACC)功能,某时刻由于电气故障,视觉传感器无法捕捉车道和目标物信息,决策控制单元失去输入信息。
2.2 控制策略
针对上述场景提出的控制策略如图1 所示。视觉传感器不能正常工作后,自动驾驶系统应立即向驾驶员发出危险提醒并请求接管,同时减速停车,直至车辆停止运动。
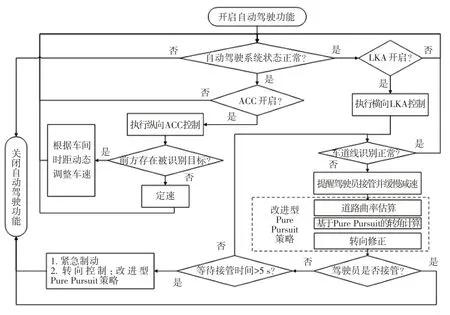
图1 某L2级自动驾驶车辆LKA和ACC功能控制策略
纵向减速控制方面,本文将减速过程分为2 个阶段。第1 个阶段为5 s 的等待接管阶段,此时车辆缓慢制动。为了保证减速的及时性、安全性,同时兼顾乘员与驾驶员的舒适性,确定等待接管时间内的目标减速度为-2.5 m·s-2[17]。如果此阶段内驾驶员接管驾驶任务,则退出自动驾驶模式。如果此阶段结束后驾驶员仍无应答,车辆应进入第2 个阶段,以最大减速度进行紧急制动。
车辆横向控制方面,本文设计了改进型纯追踪(Pure Pursuit)策略,该策略利用毫米波雷达探测到的目标车方位信息进行路径规划与跟踪,并根据车速和道路曲率对车轮转角进行修正,主要由道路曲率估算、基于Pure Pursuit的转向角计算、转向修正3个部分组成。
3 道路曲率估算
3.1 横摆角速度估算
对于车身横摆角速度而言,车辆正常行驶过程中由车辆绕质心运动而产生的横摆角速度绝对值较小,但同时基于惯性测量原理的传感器会形成大量的白噪声,从而使得传感器输出的横摆角速度数据存在较大的误差,因此,有必要根据被控车辆的参数对横摆角速度进行估算[18]。
为保证算法的实时性,兼顾后续仿真的实时性与准确性,本文利用二自由度车辆模型描述车辆的动力学性质,如图2 所示,其中,k1、k2分别为车辆前、后轮侧偏刚度,β为车辆质心侧偏角,u、v分别纵向、侧向车速,a、b分别为质心至前、后轴的距离,ωr为车辆横摆角速度,δ为前轮转角,m为整车质量,Iz为汽车绕Z轴的转动惯量,L为轴距,Fy1、Fy2分别为前、后轮侧向力。假设车辆为刚体,轮胎侧偏特性为线性,根据牛顿第二定律,得到二自由度车辆的单轨模型运动方程:


图2 二自由度车辆运动模型
根据卡尔曼滤波理论,建立车辆二自由度单轨模型的状态方程为:


量测方程为:
式中,y1、y2为卡尔曼滤波方程观测值。
综上,利用二自由度车辆动力学模型和卡尔曼滤波方法即可得到被控车辆滤波处理后的横摆角速度。
3.2 道路曲率估算
根据本文的控制策略,视觉传感器失效后,采用毫米波雷达探测得到的目标车方位信息对目标车的转弯半径进行估算[19],进而估算道路曲率信息。道路曲率估算模型如图3所示,其中Rego为主车的转弯半径,Rtarget为目标车行驶轨迹的转弯半径,r为主车与目标车的相对距离,α为目标车与主车的相对方位角。

图3 道路曲率估算模型
由图3中车辆位置信息,可以得到如下关系:

主车的转弯半径可由式(7)确定:

根据式(1)~式(7),对目标车的转弯半径进行估算验证。验证场景为:在半径为200 m的S型弯道上,目标车和自车均以60 km/h的速度定速行驶,目标车在前,自车在后,两车相距20 m,如图4所示。由图4可以看出,进入弯道后,目标车转弯曲率估算值为0.005 m-1,与真实道路曲率半径吻合程度较高,道路曲率估算模型能较好地反映车道曲率信息。

图4 S型转弯场景设计及曲率估算结果
4 改进型Pure Pursuit策略
4.1 基于Pure Pursuit的转角计算
Pure Pursuit方法如图5所示,被广泛应用于车辆的运动控制[20-22]。本文研究的某自动驾驶车辆前悬为la,以前方目标车的位置为目标,毫米波雷达探测到的方位角为αf,直线距离为rf,横向距离为dsx,纵向距离为dsy,探测物体与车辆后轴中心点间的方位角为αr,直线距离为rr。根据Pure Pursuit方法,存在唯一的转弯半径R,使得轨迹与目标车纵轴相切,相应的前轮转角为δ。

图5 Pure Pursuit路径跟踪法
分析图5可知,转弯半径R的计算公式为:

转弯半径R与车辆前轮转角的关系为:

由式(8)、式(9)可以得到实现转弯半径R所需要的前轮转角为:

4.2 转向修正
式(10)是根据理想圆弧半径R进行前轮转角控制的,由于忽略了轮胎等车辆动力学因素的影响,在目标车较远、车速较高等情况下往往不能保证理想的行驶效果。因此,有必要根据车速、目标转弯半径等因素对式(10)进行一定的修正,提高控制效果。因此,提出的改进型Pure Pursuit策略的前轮转角为:

式中,K为修正系数。
本文利用车速、道路曲率对前轮转角进行系数修正。经过大量仿真发现:当车速较高时,前轮转角响应不及时,车辆容易驶出行驶车道,因此需要增大修正系数K,以加强前轮转角对期望轨迹的响应,满足高速工况下响应的实时性;当道路曲率较小时,根据式(10)计算得到的前轮转角本身较小,车辆容易保持直线行驶,此时也应当增大前轮转角对道路曲率的响应灵敏度,确保车辆能在小曲率车道上实现及时转向。
根据上述原则,设计修正系数的模糊控制器,其输入为车速和道路曲率,车速的基本论域为[0,130]km/h,量化因子取为130,道路曲率的基本论域为[0,1/650]m-1,量化因子取为1/650。前轮转角的基本论域为[0°,0.8°],比例因子取为0.8。隶属度函数采用三角形函数,模糊控制器输入、输出变量的隶属度函数及模糊集合如图6所示,模糊规则如表1所示。

图6 模糊控制器输入、输出隶属度函数

表1 模糊控制规则库
根据本文提出的改进型Pure Pursuit 方法,在MATLAB/Simulink 中构建视觉失效条件下的控制策略模型,如图7所示,自车的相关参数如表2所示。将控制策略模型编译下载至快速原型控制器中,为控制策略硬件在环测试作准备。

图7 控制策略模型

表2 自车参数
5 测试场景与评价指标
5.1 测试场景构建
为验证控制策略在极限工况下的控制效果,本文设计了极限弯道上视觉感知失效的测试场景,如图8所示,其中各交通参与者信息如表3 所示。根据JTG B01—2014《公路工程技术标准》,确定设计场景中道路最小曲率半径为125 m,对应的弯道极限速度为125 km/h,最大曲率半径为650 m,对应的弯道极限速度为120 km/h。各测试用例等待接管阶段的目标减速度为-2.5 m/s2,紧急制动阶段制动踏板开度为100%,车辆开始进入弯道时视觉感知失效。

图8 极限弯道视觉感知失效测试场景
针对每一种弯道进行了3 种控制策略下的对比仿真分析,失去视觉信号后,转向盘保持策略、Pure Pur⁃suit 策略和改进型Pure Pursuit 策略的前轮转角控制方式分别为保持不变、按照式(10)进行控制和按照式(11)进行控制,同时均按照图1中的纵向控制策略进行减速制动。
5.2 评价指标
为了直观地衡量车辆行驶位置偏离车道中心线的程度,定义车道保持指数Ki为:

式中,dl为车辆中心偏离车道中心的距离;Wl为车道宽度,本文取为3.75 m。
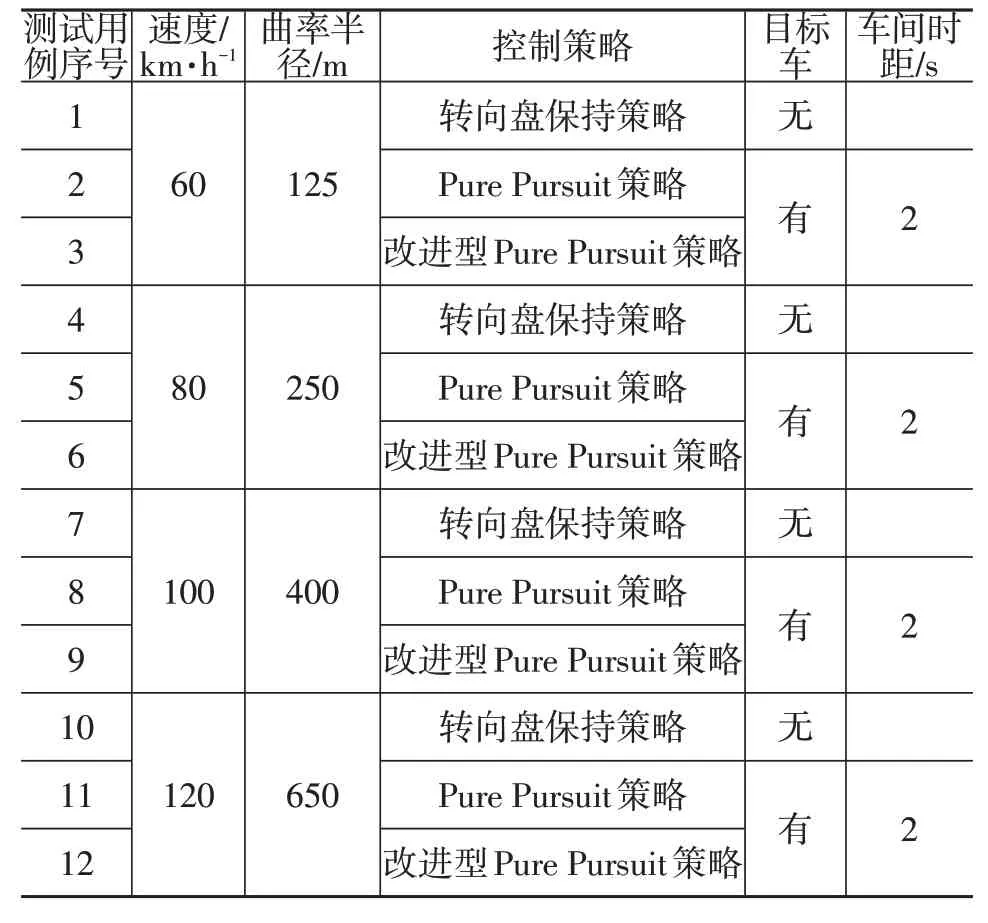
表3 视觉传感器失效条件下的测试场景
Ki=100%表明车辆在车道中心的理想位置行驶;Ki>0 表明车辆在车道线内行驶,其值越大越接近车道中心线;Ki=0 表明车辆在左/右车道线上行驶;Ki<0 表明车辆已经驶出车道线,其值越小,表明偏离程度越大,车道保持功能越差。
6 硬件在环测试
6.1 硬件在环测试平台设计
为验证控制系统的有效性,搭建了针对视觉感知与控制的硬件在环仿真测试平台,其原理如图9所示。仿真平台利用车辆仿真软件CarMaker 进行仿真场景创建,以及目标级毫米波雷达信号模拟,并通过NI PXI 进行实时仿真计算。视频黑箱为视觉感知系统提供不受干扰的仿真画面,相机传感器在视频黑箱中完成视觉信号捕捉,并发送到感知ECU,完成车道线与前方目标的识别与计算。故障模拟模块可以实现通信线路开闭,用于模拟传感器故障造成信号丢失。在故障触发后,快速控制原型机进行失效情况下的车辆控制。仿真过程和仿真数据通过VeriStand进行监测与记录。仿真平台实物如图10所示。
6.2 结果验证
6.2.1 纵向测试结果
仿真过程中,通过切断传感器CAN 总线信号模拟传感器故障。测试过程为:自车跟随主车稳定行驶,目标车间时距为2.2 s,自车进入弯道后,立即切断CAN总线信号,触发视觉失效条件下的控制策略,观测自车的运动响应。图11 所示为测试用例1~3 的初始状态和减速度响应,其他测试用例的纵向控制测试结果如表4所示。

图9 面向视觉感知与控制的硬件在环仿真测试平台原理

图10 面向视觉感知与控制的硬件在环仿真测试平台

图11 纵向控制测试结果(测试用例1~3)

表4 纵向控制策略测试结果
由图11 和表4 可以看出,车辆视觉传感器产生故障后,自车按照本文提出的控制策略进行了2个阶段的减速操作。等待接管阶段减速度约为-2.5 m/s2,时间为5 s,紧急制动阶段最大减速度约为-6 m/s2,直至车辆停止。纵向减速控制符合预期要求,同时验证了控制模型成功部署到快速原型机并正常工作。
6.2.2 车道偏离结果
图12~图15 所示为不同车速下的自车横向控制结果。
车速为60 km/h 时,采用Pure Pursuit 策略和改进型Pure Pursuit策略的控制效果基本一致,采用转向盘保持策略时自车也未驶出车道,3种控制均能安全停车。

图12 60 km/h自车横向控制测试结果

图13 80 km/h自车横向控制测试结果

图14 100 km/h自车横向控制测试结果

图15 120 km/h自车横向控制测试结果
车速大于80 km/h 时,由于制动距离的增加,采用转向盘保持策略时自车均会驶出车道,车辆不能安全停车。
采用Pure Pursuit 策略时,在相同的车间时距下,目标车与自车的距离随着车速的增加而增加,导致式(8)中计算得到的转弯半径R大于实际道路曲率半径,不能很好地适应极限曲率下的车道,驶出行车道的可能性大幅增加,120 km/h 极限工况下的车道保持效果甚至低于转向盘保持策略的控制效果,不能满足安全停车的要求。
本文提出的改进型Pure Pursuit 策略在4 种工况下均有良好的控制效果,车辆完成停车后,基本处于行车道中心,没有驶出车道,能够避免碰撞、坠落等危险事故。
图16 和表5 所示为车道中心线横向偏离的测试结果。随着车速增大,车辆制动距离增大,采用转向盘保持策略和Pure Pursuit 策略在高速行驶时容易驶出车道。在测试的4个工况中,转向盘保持策略下的平均车道保持指数为-70.1%,表明其不具备视觉失效情况下的制动安全性。

图16 不同车速下车道偏离测试结果

表5 车道中心线偏离测试结果
采用Pure Pursuit 策略时,在中低速下能起到良好的控制效果,60 km/h和80 km/h车速下车道保持指数分别为72.2%和40.1%,与图12、图13 结果相符合。但在高速工况下,车辆驶出车道,且偏离车道中心较远。4个工况下平均车道保持指数为-8.8%,同样不能满足视觉失效条件下的制动安全性。
改进型Pure Pursuit 策略在60~120 km/h 的速度范围内均取得了良好的控制效果,车辆没有驶出车道。在不同曲率半径的弯道上以不同极限速度过弯时,改进型Pure Pursuit 策略较转向盘保持策略和Pure Pursuit 策略的路径平均偏差均有所减小。4 个工况下平均车道保持指数为65.1%,表明视觉失效条件下的制动安全性较好,与车道保持策略和Pure Pursuit策略相比,平均车道保持指数较分别提高135.2%、73.9%,是3种控制策略中最安全的策略。
7 结束语
本文提出了视觉传感器失效条件下的车道保持辅助控制策略,最大程度地利用车辆完好设备资源减小危险事故发生的概率,并提出了车道保持指数,用于衡量车辆的车道保持性能,构建了国内首台面向视觉感知与控制的硬件在环仿真测试平台,分析了视觉传感器失效后3 种车辆横向控制方案的车道保持控制效果。结果表明:转向盘保持策略和Pure Pursuit 策略在车速60 km/h 以下时能够起到良好的控制效果,在车速80 km/h 以上时,均不能实现车道的良好保持,有驶出车道的安全隐患;改进型Pure Pursuit 策略根据车速和道路曲率估算值进行了转角修正,能够在60~120 km/h的速度范围内起到良好的控制效果,车道中心最大横向偏差为0.983 m,提高了视觉失效后的制动安全性。
视觉失效条件下的纵、横向耦合控制策略将是下一步研究的方向。
猜你喜欢
新疆大学学报(自然科学版)(中英文)(2022年3期)2022-06-04
昆明医科大学学报(2022年1期)2022-02-28
汽车实用技术(2021年23期)2022-01-05
汽车工程(2021年12期)2021-03-08
汽车电器(2020年9期)2020-09-30
小资CHIC!ELEGANCE(2019年20期)2019-07-02
汽车杂志(2018年6期)2018-06-25
中国建筑金属结构(2018年4期)2018-05-23
东方教育(2017年19期)2017-12-05
作文周刊·小学一年级版(2017年27期)2017-08-10
