基于纯电动汽车平台的定速巡航系统设计与研究
2020-09-30 02:03:32肖聪
汽车电器 2020年9期
肖 聪
(东风汽车股份有限公司商品研发院,湖北 武汉 430056)
1 前言
定速巡航系统 (Cruise Control System,CCS),又称自动驾驶系统,是指在一定的车速范围内,驾驶员不用控制加速踏板而能够使汽车保持设定速度行驶的控制系统。定速巡航系统开启后汽车自动保持恒定车速,减轻疲劳。同时节约燃料,提高驾驶便利性、舒适性和安全性。汽车一旦被设定为巡航状态时,VCU(整车控制器)控制MCU(电动机控制器),进而控制电动机。电动机的转速就由VCU控制,VCU会根据道路状况和汽车的行驶阻力不断地调整电动机的转速,使汽车始终保持在所设定的车速行驶,而无需操纵加速踏板。此外,在法规规定的车速下,汽车巡航控制系统能够优化行程时间和降低驾驶花费,提高整车收益。
2 定速巡航控制系统
2.1 定速巡航系统结构介绍
巡航控制系统如图1所示,巡航控制系统主要由人机交互平台、巡航工作模式、巡航控制策略3个部分组成。人机交互平台包括巡航开关、仪表巡航状态显示、巡航推迟信号(制动等),负责巡航控制系统与驾驶员的信息互动。巡航工作模式是通过巡航人机交互平台知道驾驶员的各种操作,根据驾驶员的操作来决定当前的巡航工作模式。巡航控制策略根据巡航工作模式,通过计算当前需要电动机发出的扭矩等,来控制当前电动机的状态进而达到行驶要求。
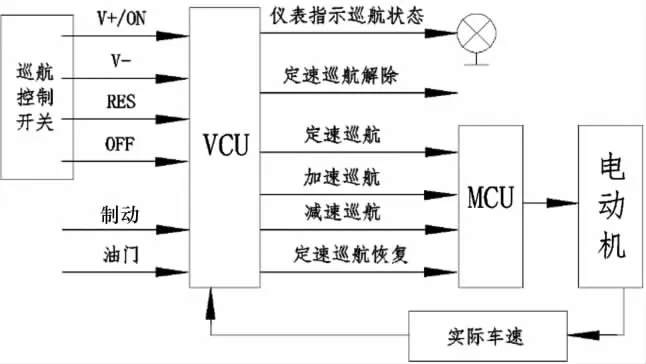
图1 巡航控制系统结构
以上3个部分组成了巡航控制系统,能够按照驾驶员的意图自动控制汽车的速度,驾驶员只要通过对巡航开关的操作就能够实现各种功能。
2.2%定速巡航控制系统介绍
在巡航控制前,先通过用户接口判断当前车速状态和操作意图,当巡航激活就进入巡航控制状态,如果发现有巡航退出信号就退出巡航功能,如果没有就进行巡航目标车速管理,根据当前行驶条件计算需要的扭矩从而达到巡航的作用,定速巡航控制策略图如图2所示。
3 巡航控制系统人机交互平台
3.1 巡航开关

图2 定速巡航控制策略图
巡航开关为驾驶员请求巡航功能的唯一输入界面,是设定巡航速度和取消巡航功能的重要部件,巡航开关的技术要求如下:①巡航主开关为自锁式,即按下后不能自动复位;②巡航开关上带CANCEL键;③巡航开关功能组合方式为V+/ON键 (加速键/设定键)、V-键 (减速键)、OFF键 (关闭键)、RES键 (恢复键)4个键,这4个开关为非自锁式。巡航开关电路,电阻值以及精度要求如图3所示,输入信号类型为模拟量,每个电阻的精度要求为±5%。

图3 巡航开关电气原理图
3.2 仪表指示
仪表上巡航指示灯的作用是指示巡航系统工作状态,由VCU输出信号给仪表,通过硬线输出或者CAN通信方式输入至仪表,仪表负责显示当前巡航的状态。对仪表和显示的要求如下。
3.2.1 VCU通过硬线直接驱动仪表上巡航指示灯
VCU通过硬线直接驱动仪表的巡航状态灯遵循:①巡航主开关为OFF状态,此时仪表上巡航指示灯熄灭;②巡航主开关为ON状态,但巡航条件不满足,没有进入巡航状态,巡航指示灯闪烁,闪烁的频率为1Hz;③巡航激活,汽车正在进行巡航,巡航指示灯为常亮,巡航指示灯的颜色为绿色。
3.2.2 通过CAN通信方式发信号至仪表
VCU通过CAN通信方式发送巡航信号给仪表,由仪表MCU驱动巡航状态灯,需要VCU发送巡航主开关状态/巡航激活状态/巡航目标车速/巡航目标车速的有效标志位等信号到仪表,再由仪表根据灯的控制算法控制巡航指示灯工作。同时,仪表控制巡航指示灯遵从:①巡航主开关是OFF状态时,巡航指示灯熄灭;②巡航主开关是ON状态时,但巡航条件不满足,没有进入巡航状态,巡航指示灯为白色常亮;③巡航激活时,巡航指示灯为绿色常亮等方式。
以上两个方面定义了巡航的人机交互的巡航开关和巡航状态指示灯,除此之外还有制动信号、电子油门信号和挡位信号,这些信号也是驾驶员对汽车的操作意图的输入。
4 巡航工作模式
巡航工作模式是进入巡航控制、解除巡航控制、设置巡航目标车速、恢复巡航控制、记忆与清除巡航目标车速等5种功能。
4.1 进入巡航控制条件
当驾驶员把挡位挂到D挡或者R挡时,此时的车速大于Vmin且小于Vmax,同时VCU没有检测到与巡航功能相关的故障码,这时按下V+/ON键激活巡航功能,巡航主开关变为ON状态,随之汽车以目前的车速进入巡航,并且记忆当前车速。
4.2 解除巡航控制
当汽车正在进行巡航时,如果发生下述任何一种情况时,就取消定速巡航功能。
1)当驾驶员把巡航主开关拨至OFF键,定速巡航就取消,同时清除巡航记忆车速。
2)当驾驶员踩制动或者踩油门或者挡位拨到N挡,巡航被解除。
3)当车速传感器/制动开关/巡航开关等出现故障时,巡航被解除。
4)当电子稳定控制系统 (ESC)等功能激活或者通信故障时巡航被解除。
5)当电动机转速超过限值,巡航被解除。
6)当前车速低于最小设定巡航车速或者最大设定巡航车速,巡航被解除。
4.3 设置巡航目标车速
4.3.1 巡航加速
汽车在巡航过程中,按V+/ON键,目标车速增加,实际车速会很快靠近目标车速,达到汽车加速目的。短按V+/ON键一次,目标车速增加V11;长按V+/ON键不放,目标车速以ΔV为步长增加目标车速。
在需要超车时,踩下加速踏板加速,巡航控制暂时退出,在超越巡航车速后,松开加速踏板,汽车将恢复之前设定的速度。超车时,巡航指示灯熄灭,恢复巡航时,巡航指示灯恢复。当上陡坡或者下陡坡时,汽车不会保持设定速度。在这种情况下行驶时,不要使用定速巡航 (当目标车速与车速偏差太大时,定速巡航自动退出,巡航指示灯熄灭)。
4.3.2 巡航减速
汽车在巡航过程中,按V-键,目标车速减少,实际车速会很快靠近目标车速,达到汽车减速目的。短按V-键一次,目标车速减少V21;长按V-键不放,目标车速以ΔV为步长减少目标车速。
4.4 恢复巡航控制
当巡航主开关在ON位置,由于按OFF键、踩制动、变速杆至N挡、踩油门加速操作巡航功能被解除。当前汽车工况符合4.1巡航进入条件时,按V+/ON键,将被解除前的目标车速设置为当前的目标车速。速度控制系统将会加速或者减速到目标车速附近,进行巡航控制。
4.5 记忆与清除巡航目标车速
当按下V-键时,此时的汽车车速就被记录为目标车速。当驾驶员把巡航主开关拨至OFF状态,表明汽车关闭巡航功能;如果巡航主开关在ON状态,但是电动机熄火,巡航目标车速将会被清除。
5 巡航控制策略
5.1 按键状态的识别
巡航控制按键由V+/ON键、V-键、RES键以及OFF键4个按键组成,其中车速设置键与V+/ON键为同一按键。按键可根据上述4个按键的状态进行识别。按键功能定义如表1所示。

表1 按键功能定义表
5.2 按键的操作意图识别
一般地,PTO控制按键、巡航控制的加减速按键、车速最高限制调整按键以及怠速微调按键之间是复用的,因此在识别到加减按键操作后,还需要根据电动机工作的状态以及车速条件对按键的操作意图进行确认,以保证系统的安全性。
5.2.1 按键功能操作意图判断
1)当最高车速限制调整功能被激活后,巡航的加减速按键功能将被锁定,即此时加减速按键被车速限制模块调用,直到车速最高限制调整时间结束后,加减速按键功能方能再次被巡航控制功能调用。
2)在巡航控制被暂停时,巡航按键的状态除关闭按键可被识别外,其余按键状态将被忽略。
3)在车速小于巡航激活车速且大于巡航退出车速时,此时巡航按键状态除持续的减速按键以及关闭按键状态可以被识别以外,其余按键操作将被忽略。意味着巡航的退出必须通过OFF按键控制,加减速按键功能不能导致巡航的自动退出,目的为了与PTO控制按键功能进行解耦。
操作意图的判断流程如图4所示。
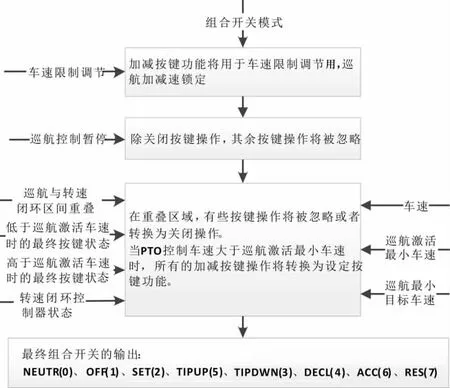
图4 巡航组合开关操作意图识别流程
5.2.2 定速巡航车速使能区间
为进一步说明对按键操作意图的控制,给出了定速巡航车速使能区间,如图5所示。在不同车速区域内,对按键的操作进行不同程度的限制,具体说明如下。
1)区域1表示在该区域巡航的控制功能处于退出状态,不再响应任何按键的操作。
2)区域2表示在该区域巡航的控制功能处于退出等待状态,除了关闭按键不再响应任何按键的操作。
3)区域3表示在该区域巡航的控制功能处于退出过渡状态,在该区间可识别OFF键以及从4区域到3区域持续的DECL键,其余按键将会识别为NEUTR或者识别为OFF,取决于标定。
4)区域4表示在该区域巡航的控制功能处于正常控制状态,在该区域各个按键状态都会被识别与响应。
综上所述巡航组合式开关的处理流程如图6所示。
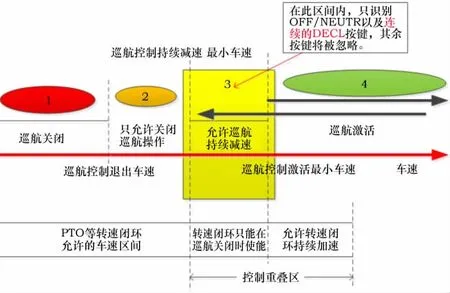
图5 定速巡航车速使能区间

图6 巡航控制状态切换状态机
5.3 巡航退出条件
巡航控制受到多个条件约束,每个约束条件都可以停止巡航的控制,但需要指出的是,巡航退出可以有暂时性的,比如说在巡航控制过程换挡时,巡航暂时退出,待换挡结束后,巡航控制可自动恢复。对于不同的退出条件,我们可以将其分为3类,如表2所示。
对于巡航的退出方式也可以分为3类,如表3所示。
5.4 巡航目标车速的管理
巡航目标车速根据巡航控制状态和控制子状态对目标车速进行单次加减计算以及斜坡处理。按状态可分为以下几种。
1)连续加速状态CrCtl_ACCELERATION:在目标车速允许的范围内处理目标车速上升步长,同时判断车速与目标车速偏差,若偏差过大应停止车速斜坡;除此还需要检测巡航扭矩输出是否大于上限值,若扭矩过大也需要停止车速的斜坡,当持续加速退出时,目标车速将设置为当前车速。
2)连续减速状态CrCtl_DECELERATION:在目标车速允许的范围内处理目标车速下降步长,同时判断车速与目标车速偏差,若偏差过大应停止车速斜坡;除此还需要检测巡航扭矩输出是否小于下限值,若扭矩过小也需要停止车速的斜坡,当持续减速退出时,目标车速将设置为当前车速。
3)单次加速状态CrCtl_TIP_UP:在目标车速允许的范围内处理目标车速单次上升。
4)单次减速状态CrCtl_TIP_DOWN:在目标车速允许的范围内处理目标车速单次下降。
表2 巡航退出条件种类表

表3 巡航退出方式以及优先级分类
5)高速恢复低速状态CrCtl_RESUME_F_ABOVE:处理RES按键请求,当前车速大于恢复目标车速时,对目标车速进行斜坡处理。斜坡过程可参考连续减速处理。
6)低速恢复高速状态CrCtl_RESUME_F_BELOW:处理RES按键请求,当前车速小于恢复目标车速时,对目标车速进行斜坡处理。斜坡过程可参考连续加速处理。
7)关闭状态CrCtl_OFF:根据退出条件对巡航退出方式进行判断,并根据退出条件对目标车速记录是否进行删除。
8)等待状态CrCtl_STAND_BY:在该状态下,巡航控制未激活,巡航有效扭矩输出为0,巡航车速不做改变。
9)巡航状态CrCtl_CRUISE:在该状态下,巡航目标车速将不做变化,巡航保持激活。
巡航车速处理示意图,如图7所示。

图7 巡航目标车速设置示意
5.5 巡航扭矩的管理
巡航扭矩管理主要通过巡航目标车速与实际车速偏差计算巡航控制扭矩。巡航控制器是一个PI控制器,其中P、I参数可通过汽车挡位信息进行选择。控制器输出的扭矩需要受到巡航控制扭矩上下限值的限制。巡航扭矩管理可分为开环和闭环两种方式。巡航扭矩开环控制主要是针对巡航固定时间退出与固定斜率退出条件以及处理巡航控制状态切换时扭矩的突变,以保证巡航状态切换时汽车驾驶的舒适性;而闭环控制则主要是为了实现车速闭环控制进行设计。巡航扭矩管理示意图如图8所示。
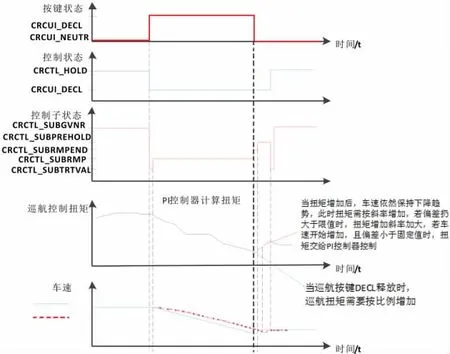
图8 巡航扭矩管理示意
6 巡航诊断与标定
6.1 巡航输入诊断
巡航控制系统诊断功能的目的是防止巡航开关出现故障不能回位,或者是被其他信号干扰,或者是巡航信号输入信号线出现故障情况,而被VCU错误地识别驾驶员的输入。为了保证人、车、环境系统安全要求巡航控制系统具备故障诊断功能,故障码按照ISO-15031-6-2005要求进行设置,如表4所示。
当出现任何一个故障时,需要立即屏蔽巡航功能并点亮故障灯,巡航系统零部件诊断功能验证在OBD标定验证模块中统一进行。

表4 诊断故障表
6.2 巡航标定性能验证
6.2.1 巡航车速与目标车速误差验证
进行巡航时,汽车完全由VCU控制汽车按照驾驶员设定的速度进行工作,如果标定不合理的,当前的巡航车速与驾驶员需求的目标车速会有较大的误差,影响巡航性能。所以需要验证巡航车速控制误差,试验环境需要在转毂上进行验证,转毂加载方式为查表进行加载,试验过程需要采集数据进行分析,同时要求巡航目标车速和实际车速误差小于±3km/h。
6.2.2 巡航功能驾驶性验证
由驾驶性评价人员在试验场地进行巡航功能验证,验证巡航功能、驾驶性能。汽车正常驾驶,自动挡汽车D挡模式,根据平直道路上正常驾驶、加速巡航、减速巡航、巡航解除、巡航功能恢复与解除,以及坡道上巡航加速和巡航减速性能验证等项目工况进行标定,这些项目下不同的车速巡航下进行评价,标定表如表5所示。
7 总结
全文开篇介绍了定速巡航系统结构和定速巡航控制系统,分别对巡航控制系统人机交互平台、巡航工作模式、巡航控制策略进行详细的设计说明,最后还介绍了巡航输入诊断和巡航标定性能验证的方法,全面地检查巡航功能的驾驶性水平。本文对纯电动汽车的定速巡航系统研究和开发提供了一种有效的设计方案,具有一定的参考价值。

表5 巡航标定评价表
猜你喜欢
汽车维护与修理(2021年13期)2022-01-14 00:25:00
航海(2020年2期)2020-05-13 14:10:38
石家庄职业技术学院学报(2018年6期)2019-01-18 12:45:26
环球市场(2018年19期)2018-09-10 03:36:04
汽车维修技师(2017年8期)2018-01-08 01:06:50
科技资讯(2015年14期)2015-06-29 17:53:26
汽车维修与保养(2015年7期)2015-04-17 02:12:38
汽车维护与修理(2015年3期)2015-02-28 12:16:00
汽车维修与保养(2014年12期)2014-04-18 14:14:15
泰州职业技术学院学报(2014年2期)2014-02-28 17:09:58