遥感卫星光学载荷对月定标成像参数系统级分析方法
2020-07-15 09:33徐驰赵晨光莫凡
航天器工程 2020年3期
徐驰 赵晨光 莫凡
(北京空间飞行器总体设计部,北京 100094)
为了提高陆表信息定量化反演所需的遥感数据精度,卫星需要进行在轨辐射定标[1]。而在轨天体辐射定标方法由于具有受环境因素影响小、定标频次高等优势,越来越受到大家的关注[2-4]。在天体定标中,对月定标的优势主要包括:①月球是除太阳外视张角最大的地外目标物,一次对月成像可完成星载被动光学载荷大量像元的绝对辐射标定;②月球反射特性十分稳定,适合于探测器辐射响应稳定性跟踪;③对月定标还具有不受地球大气影响、定标光谱覆盖可见近红外全部谱段等优点[5-6]。上述优势使得月球非常适合作为卫星在轨辐射定标的参考基准源。
文献[7]中提出了一种光学遥感卫星对月定标姿态机动补偿方法。该方法是基于一定的相机积分时间计算卫星姿态机动所需的姿态控制参数,从而解决星载相机对月成像过程中积分时间与推扫速度失配的问题。然而,该方法并未对定标任务所需的相机增益、级数等成像参数进行分析,不能完全满足对月定标任务的系统级卫星参数设置需求。文献[8]中给出了中分辨率成像光谱仪(MODIS)和宽视场海洋水色扫描仪(SeaWIFS)的对月定标方法,但仅介绍了定标的算法相关内容,并未从任务实现的具体流程方面进行详细阐述。
本文基于遥感卫星光学载荷的特点,提出一种对月定标成像参数系统级分析方法,并基于高分七号卫星的技术状态仿真验证了方法的可行性。
1 成像参数系统级分析方法
在选择对月定标成像参数时,需要从整星的系统级设计层面出发,综合考虑卫星机动能力、能量平衡、测控弧段选择等因素。分析方法流程如图1所示。在对月定标工作模式设计环节,需要基于卫星的技术状态设计详细的对月定标时机和姿态机动策略;而相机对月成像积分时间计算、饱和电压对成像参数的限制,以及信噪比对积分级数的需求环节,需要结合有效载荷的特点进行分析。
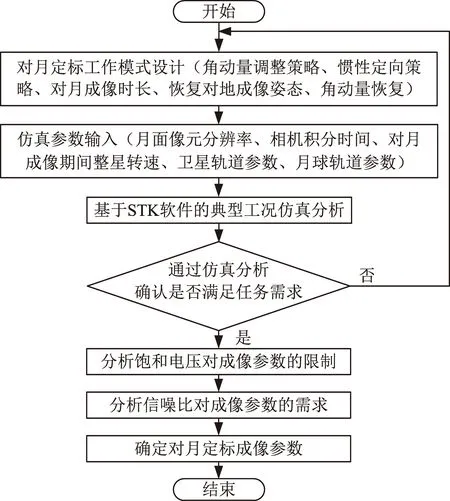
图1 分析方法流程Fig.1 Analysis method flow
1.1 对月定标工作模式设计
遥感卫星对月定标工作模式涵盖了从角动量调整及稳定阶段、惯性定向阶段、对月成像阶段、恢复对地成像姿态阶段、恢复标称角动量阶段,如图2所示。

注:t1~t4为各阶段姿态机动所用时长。 图2 对月定标机动策略示意Fig.2 A schematic diagram of attitude maneuver strategy for lunar calibration
(1)角动量调整及稳定阶段:通过调整角动量使卫星获得更强的姿态机动能力。
(2)惯性定向阶段:整星进行惯性定向和稳定,建立对月成像所需初始姿态。
(3)对月成像阶段:整星绕俯仰轴旋转,光学载荷对月成像。
(4)恢复对地成像姿态阶段:对月成像结束后,卫星进行惯性定向和稳定,恢复对地正常成像姿态。
(5)恢复标称角动量阶段:恢复卫星标称角动量。
1.2 相机对月成像积分时间计算
地、月、星相对位置关系如图3所示。图中:Re为地球半径;Rm为月球半径;H为卫星轨道高度;f为光学载荷焦距;Lem为地月平均距离;d为光学载荷像元大小;Sm为月面像元分辨率。
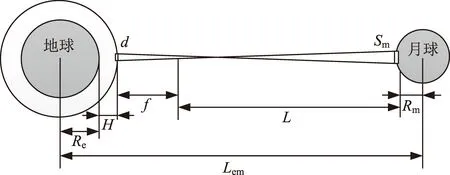
图3 对月观测距离关系示意Fig.3 A schematic diagram of imaging distance of moon observation
对于类似高分七号的低轨遥感卫星,其轨道高度约为数百千米,而地月平均距离为38.4万千米,因此可以假定卫星和月球之间的距离约等于地月之间的距离,故月面像元分辨率为
(1)
卫星拍摄月球时,可以将月球当作一个圆平面,卫星不采用机动执行惯性成像时,在沿轨方向卫星飞行速度vsat在月面上的投影速度vm近似于卫星在赤道平面法线方向的速度分量,即
vm=vsat·cosφ
(2)
式中:φ为卫星对地的纬度。
由于TDICCD积分时间为卫星在月面上扫过一个像元的时间,则对月成像积分时间为
tm=Sm/vm
(3)
1.3 饱和电压对成像参数的限制
对月成像时需要考虑积分时间设置不能引起器件饱和,基于1.1节的姿态机动方案,可计算出整星绕俯仰轴旋转时与某一转速相匹配的相机积分时间,并获得该积分时间对应的TDICCD电压,进而判断该参数设置是否满足饱和电压的限制。TDICCD器件信号电压为
(4)
式中:L(λ)为入瞳辐亮度;R(λ)为TDICCD在满级数N级时的响应度;λ为波长;M为实际使用级数;t为TDICCD的积分时间;Δλ为波段宽度;τ为相机的光学透过率;F为相机的焦距与孔径之比[9]。
1.4 信噪比对积分级数的需求
饱和电压对积分级数作出了最大值的限制,但对月定标时需要获得更高的图像质量以提高与自动月球观测天文站(ROLO)模型的匹配精度,这就对相机的积分级数最小值提出了要求,在选择合适的成像参数时需要予以考虑。
2 高分七号卫星仿真验证
2.1 相机对月成像积分时间计算
本节基于上文分析,结合高分七号卫星的技术状态进行仿真验证。无姿态机动时,高分七号卫星位于地球不同纬度的对月成像积分时间如表1所示。

表1 无姿态机动时不同纬度的积分时间Table 1 Integration time at different latitudes without attitude maneuver
由表1可知,高分七号卫星双线阵后视相机对月成像时,全色谱段所需最短积分时间为69 ms,超出了相机能够适应的积分时间设置范围,因此要采用整星绕俯仰轴旋转的姿态机动方式配合相机对月成像,以减少月球影像畸变。结合高分七号卫星自身的机动能力,设计整星绕俯仰轴转速为0.06(°)/s~0.12(°)/s。
2.2 STK软件仿真分析
高分七号卫星运行在近似与赤道面垂直的轨道上,考虑尽量减少姿态建立阶段阳照区非正常对地姿态时间,将对月扫描成像轨位选择在地影区末段,同时保证对月成像期间卫星不出地影,如图4标红部分所示。
基于上述定标弧段,选取卫星绕俯仰轴转速为0.1(°)/s的典型工况进行仿真,卫星姿态仿真曲线如图5~7所示。由仿真结果可知,该工况下卫星可完成对月定标姿态机动,并在对月定标任务结束后恢复正常对地成像姿态。
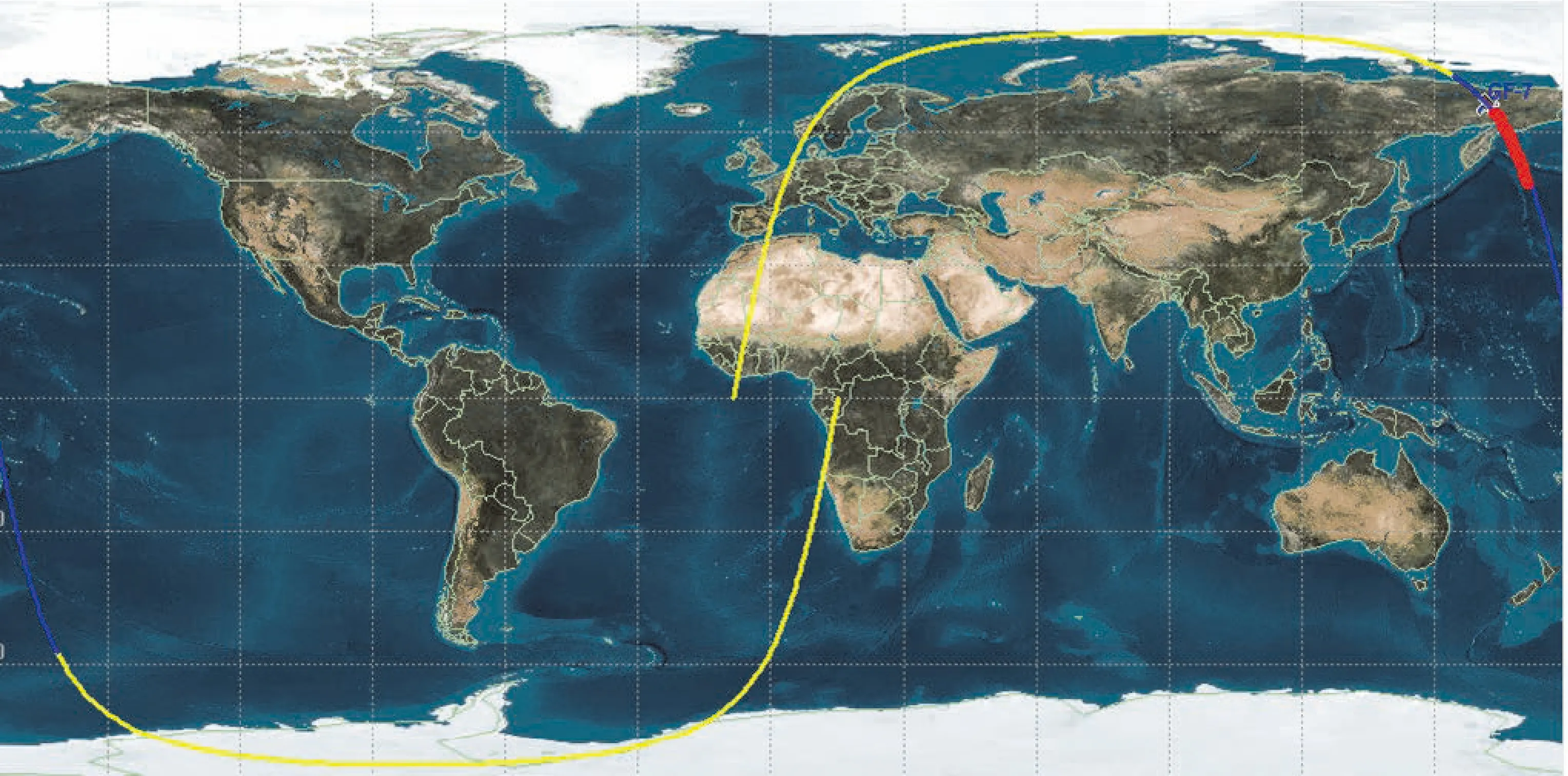
图4 对月定标典型工况选用弧段示意Fig.4 Orbit arc used for lunar calibration under a typical working condition

图5 载荷光轴指向变化仿真Fig.5 Simulated optical pointing direction variation

图6 实际姿态角及姿态角误差Fig.6 Actual attitude angles and angle errors
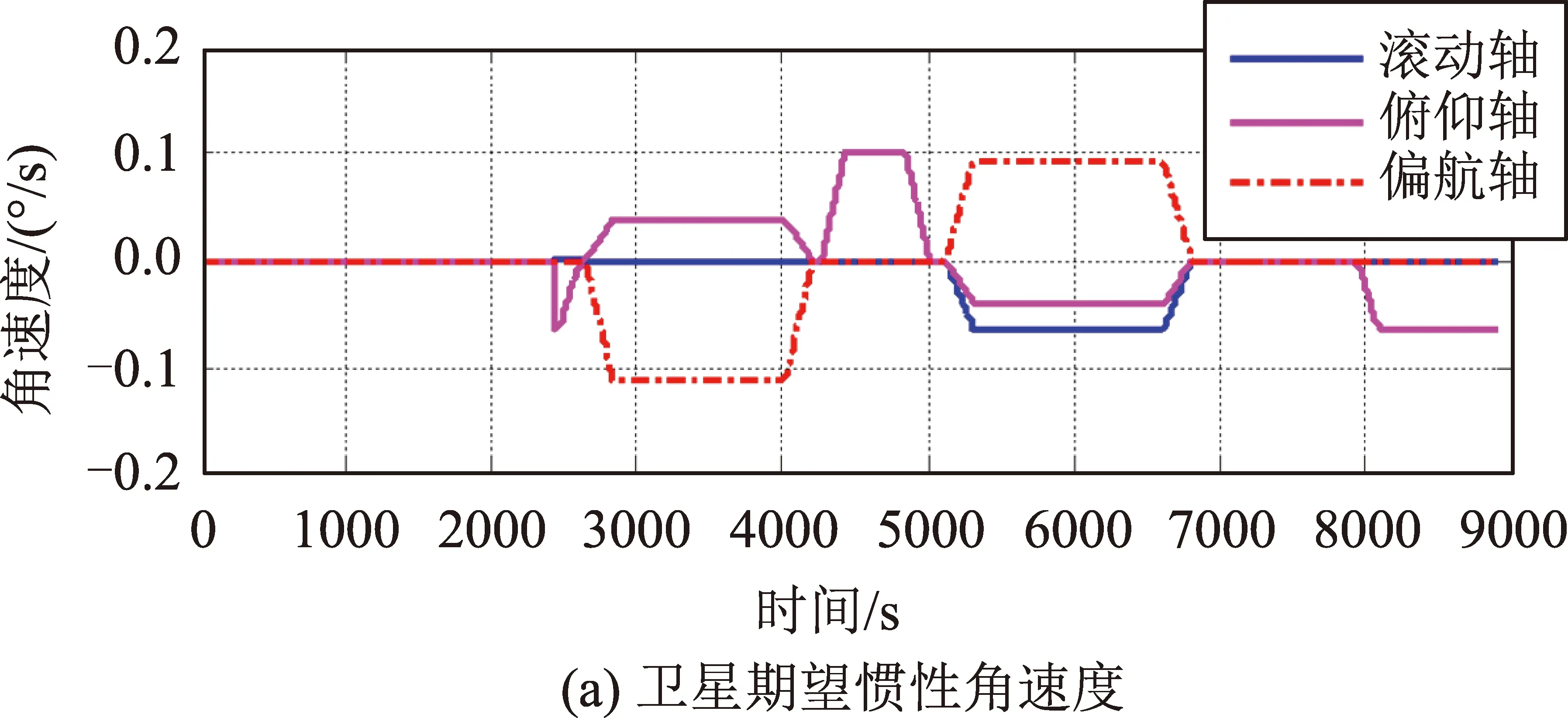

图7 星上规划角速度和测量角速度Fig.7 Angular velocities of on-orbit planning and measuring
2.3 饱和电压对成像参数的限制
以高分七号卫星后视相机为例,计算绕俯仰轴转速、积分时间及在轨使用积分级数的要求。仿真分为6个工况,如表2所示。
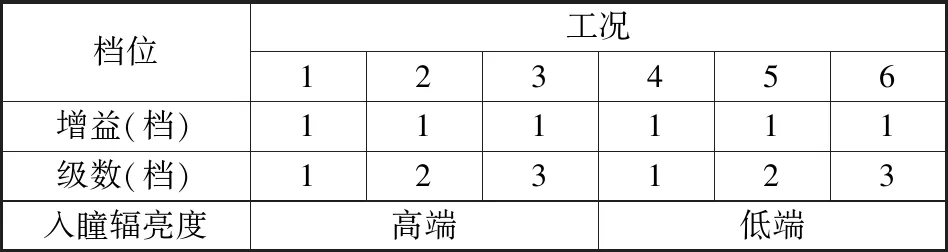
表2 成像参数仿真工况Table 2 Imaging parameters of different working conditions
不同谱段的级数档位对应的实际积分级数有所不同,本文中级数1档对应的各谱段级数范围约8~32级;2档约36~64级,3档约72~128级。基于第2.1节分析,以整星绕俯仰轴转速为0.06(°)/s~0.12(°)/s为边界条件,选取表2中的增益和积分级数进行仿真计算。根据各器件截止电压,成像参数的设置范围如图8~9所示。
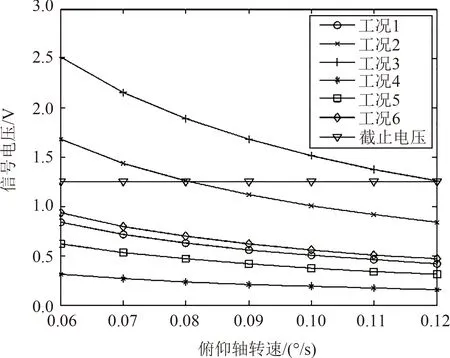
图8 不同工况下后视相机P谱段俯仰轴转速与 信号电压的关系Fig.8 Relationships between signal voltage (P-band) and rotation speed under different working conditions for backward viewing camera

图9 不同工况下后视相机多光谱谱段俯仰轴转速与信号电压的关系Fig.9 Relationships between signal voltage and rotation speed under different working conditions for backward viewing camera (multi-spectral bands)
由上文分析可得:对于P谱段,转速小于0.08(°)/s时,可以选择除工况2、工况3外的成像参数;对于P谱段,不建议使用工况3的成像参数;对于B4谱段,转速小于0.09(°)/s时,可以选择除工况3外的成像参数;对于B1~B3谱段,可以选用工况1~工况6的成像参数。
2.4 信噪比对积分级数需求分析
参考第2.3节分析的结果,选用高分七号卫星在轨常见工况(工况2和工况5)作为输入,基于卫星不同转速计算信噪比,结果如表3所示。
若按照一般图像处理的高入瞳辐亮度信噪比高于48 dB、低入瞳辐亮度信噪比高于23 dB指标要求,由表3数据可得:对于B1,B2,B3谱段,转速大于0.09(°)/s时,在不超过饱和电压的前提下,应在双线阵相机在轨常用成像参数的基础上适当调高积分级数,以获取更好的信噪比;对于P谱段和B4谱段,在卫星的机动能力范围内,双线阵相机在轨常用成像参数能满足信噪比要求。目前,高分七号正在进行在轨测试,将择机依据本文所述方法开展对月定标试验。

表3 在轨常见工况信噪比分析Table 3 SNR analysis of common working conditions
3 结束语
本文针对遥感卫星在对月定标任务中光学载荷对成像参数的分析需求,提出了一种对月定标成像参数系统级分析方法,并基于高分七号卫星技术状态设计了对月定标工作模式,通过STK软件进行了典型工况仿真和计算验证,获得了适用于高分七号卫星对月定标任务的载荷成像参数,证明了本文方法的有效性。该方法具有较强的普适性,将其应用到遥感卫星光学载荷对月定标任务中,可保证对月成像的图像质量。后续可通过研究基于本方法的定标数据地面处理技术,进一步提高定标精度,为基于卫星遥感影像的陆表信息定量化反演提供更精准的数据。
猜你喜欢
科技风(2022年26期)2022-10-10
纺织标准与质量(2022年2期)2022-07-12
航天器工程(2022年3期)2022-07-12
测绘地理信息(2022年3期)2022-06-05
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
今日农业(2021年19期)2022-01-12
北京理工大学学报(2021年8期)2021-09-14
舰船电子对抗(2020年1期)2020-04-27
知识文库(2019年4期)2019-10-20