高分七号卫星双线阵相机关键技术设计
2020-07-15 09:34杨居奎王长杰孙立朱永红黄颖
航天器工程 2020年3期
杨居奎 王长杰 孙立 朱永红 黄颖
(北京空间机电研究所,北京 100094)
双线阵相机分系统是“高分七号”卫星的重要有效载荷,其中前视相机可以获取0.8 m地面像元分辨率的全色影像,后视相机可以获取0.65 m/2.6 m地面像元分辨率的全色/多光谱影像;2台相机的全色影像可生成立体影像,后视相机的全色影像和多光谱影像融合生成彩色正射影像产品。
国内外采取双线阵方式进行传输型测绘的卫星主要有[1-3]:①法国地球资源卫星斯波特-5(SPOT-5)的高分辨光谱仪(HRS)双线阵相机可沿轨实时获取立体影像,地面像元分辨率5 m,地面立体覆盖宽度120 km;②日本的先进陆地观测卫星(ALOS),卫星装载高分辨率三线阵全色相机(PRISM),前/后视相机与正视相机夹角为24°,基高比为1,地面像元分辨率为2.5 m,前视和后视相机立体幅宽为35 km;③印度2005年5月发射的第1颗立体测绘卫星IRS-P5(Cartosat-1),轨道高度为618 km,装载2台线阵相机(AWIFS),其地面像元分辨率为2.5 m,覆盖宽度为30 km。
测绘相机相对于一般资源探测或者军事侦察的相机有着较为特殊的要求,不同于其它遥感载荷更关注辐射精度方面,高精度测绘相机对几何精度要求严苛,本文采取双线阵相机获取立体影像,从而完成卫星高精度测绘制图。
1 关键技术需求分析
卫星设计之初,关键技术的分析均以满足实现1∶1万比例尺测绘地图的制图为出发点,为了完成对未知地区进行定位和测图的要求,在暂不考虑激光测距仪进行补充校准的情况下,高分七号卫星系统必须提供下述条件:①利用双线阵相机完成对地面的推扫成像,形成2幅具有一定视角且相互重叠的双线阵航带影像;②利用星敏感器和其他姿态测量部件完成对卫星姿态的测量,获取卫星在惯性坐标系中的绝对位置,为双线阵影像提供3个外方位角元素;③利用轨道测量部件完成轨道定位测量,为双线阵影像提供3个外方位位置元素[4-7]。
双线阵相机在轨工作原理如图1所示,前视相机和后视相机线阵阵列安装时两者基本处于平行排列,在轨运行时垂直于飞行方向,在不同时刻分别针对地面条带M成像,t1时刻前视相机成像,t2时刻后视相机成像[8]。
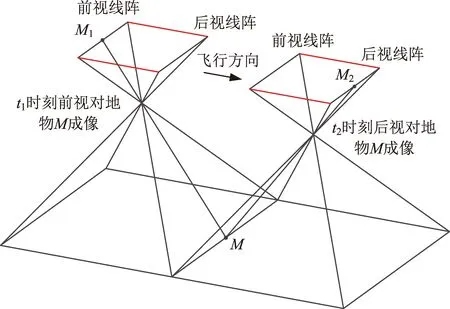
图1 双线阵相机立体测绘原理图Fig.1 Working principle of two-line array mapping camera
据文献[9]可知,立体测绘系统的测绘精度主要受以下方面的影响:①外方位元素(角元素、位置元素);②姿态角误差(星敏感器光轴指向精度、星地相机光轴夹角测定精度、前后视相机间夹角稳定性精度);③影像点坐标及焦距误差。
根据误差源的分解,双线阵相机设计关键相关分解如图2所示。
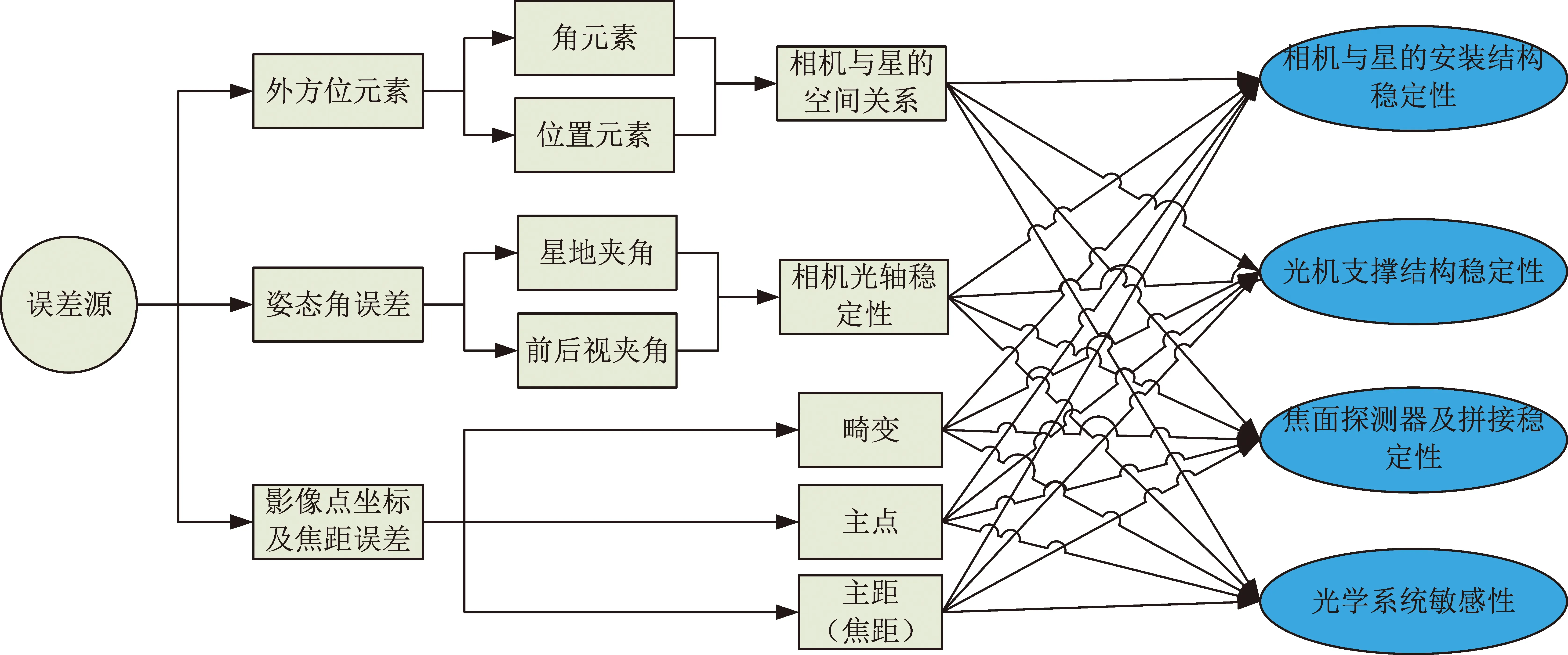
图2 设计关键分析Fig.2 Analysis of design key
综上所述,为满足高精度测绘的需求,双线阵相机在设计上需要关注的直接相关重点有4项:①相机与星之间安装结构稳定性;②光机支撑结构稳定性;③焦面探测器及拼接稳定性;④光学系统敏感性。这4项,具有一定的独立性,又有一定的耦合性。另外,由于在轨变化的主要因素是温度,因此高精度的热控是保障光机稳定的必要条件。
2 相机关键技术及实现
2.1 光学系统敏感性设计
内方位元素的稳定性,首先取决于光学系统对光学元件位置公差的敏感性,在光学系统敏感性低的情况下,结合高稳定的结构和高精度的热控技术才能够实现技术指标的要求[10]。
双线阵相机分系统通过采用低敏感三反离轴远心光学系统设计,构型如图3所示。主镜为八次非球面,次镜和三镜为二次非球面。光学系统设计传递函数P谱段平均为0.401 2,B谱段最小平均为0.796,沿线阵方向绝对畸变小于0.3 μm,相对畸变误差小于2.410-6。温度变化±0.5 ℃时,光学系统焦面变化约为±0.01 mm,光学系统焦深为±2 F2≈±0.099 mm(=0.45 μm),光学系统传递函数变化很小,满足相机设计指标要求。

图3 光学系统示意图Fig.3 Optical system of camera
光学系统加公差后,畸变敏感度分析结果见表1,校准畸变变化小于0.23 μm,光学系统畸变对公差不敏感,畸变稳定性好。

表1 光学系统畸变公差敏感度分析Table 1 Distortion sensitivity analyze of optical system
如表2所示,主次镜镜间距变化对光学系统后截距和焦距的影响约为1∶2.18和1∶1.51,次三镜镜间距变化对光学系统后截距和焦距的影响约为1∶0.16和1∶0.94,镜间距变化对光学系统的后截距和焦距影响不敏感,而且光学系统为准远心光路,因此,光学系统设计对相机主点、主距稳定性有利。
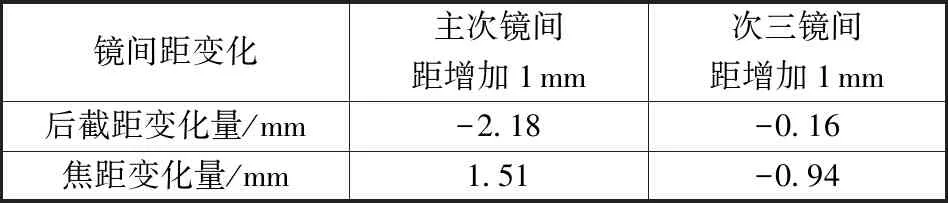
表2 镜间距敏感度分析结果Table 2 Sensitivity analyze of thickness between mirrors
2.2 相机与星之间安装结构稳定性设计
为减少卫星平台的影响,相机与卫星进行解耦安装,在轨工作时相机与卫星之间为3点挠性静定支撑,避免卫星平台的变形传递到相机上,影响光机结构稳定性[11-12]。发射时提供3个额外的解锁支撑点,用以承受发射段力学环境,入轨后解锁支撑点通过火工装置解锁脱开,相机恢复静定状态。图4给出了底部支撑的分布图,图5给出了解锁支撑的实物图。
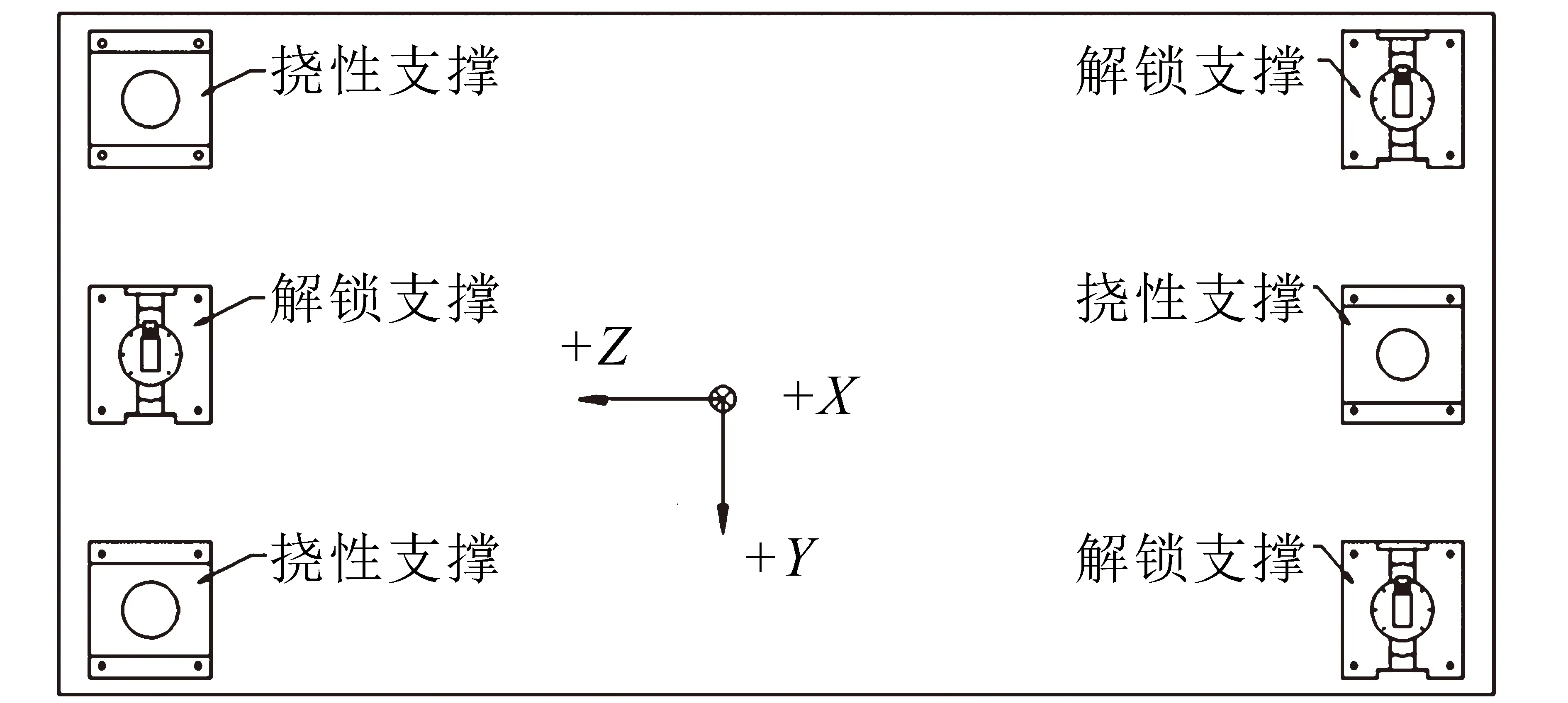
图4 相机底部挠性支撑和解锁支撑分布图Fig.4 Distribution of static support and lock-unlock support mechanism at camera bottom

图5 解锁支撑Fig.5 Lock-unlock support mechanism
2.3 光机支撑结构稳定性设计技术
卫星在轨工作期间处于复杂、交变的热环境下,要保证良好的几何稳定性,一方面需通过立体测绘相机分系统光机结构的稳定设计,保证反射镜面形、镜间距和焦面几何结构稳定,获得较高的相机内方位元素稳定性;另一方面,通过高稳定性的一体化结构设计,保证相机之间的相对几何稳定性[13]。
1)反射镜微应力支撑技术
反射镜组件由反射镜、中心嵌套、中心筒、背板构成。示意图如图6所示。中心嵌套与反射镜注胶粘结,中心嵌套材料选用与反射镜材料(SiC)线膨胀系数一致殷钢。中心嵌套与中心筒通过螺钉拧紧固定,为确保热匹配性,中心筒材料与中心嵌套材料一致。反射镜、中心嵌套、中心筒形成反射镜部件,实现对反射镜的微应力定位支撑,这种支撑形式的优点在于延长了反射镜背板至反射镜胶结区的传力路径,避免因强迫位移导致反射镜面形精度下降。

图6 反射镜微应力支撑结构示意图Fig.6 Configuration of mirror assembly
2)高稳定性箱式主框架设计技术
双线阵相机的光学元件在位置分布上趋于前后两组的形式,根据光学结构的特点,在机身设计上将次镜组件、调焦组件(含平面镜组件)固定在前框上。将主镜组件、第三镜组件和焦面组件固定在后框上。前框、后框和中间采用碳化硅一体化成型,使得主体各部分材料一致性好,热稳定性好,有利于保证内方位元素的稳定性。主框架示意图如图7所示。
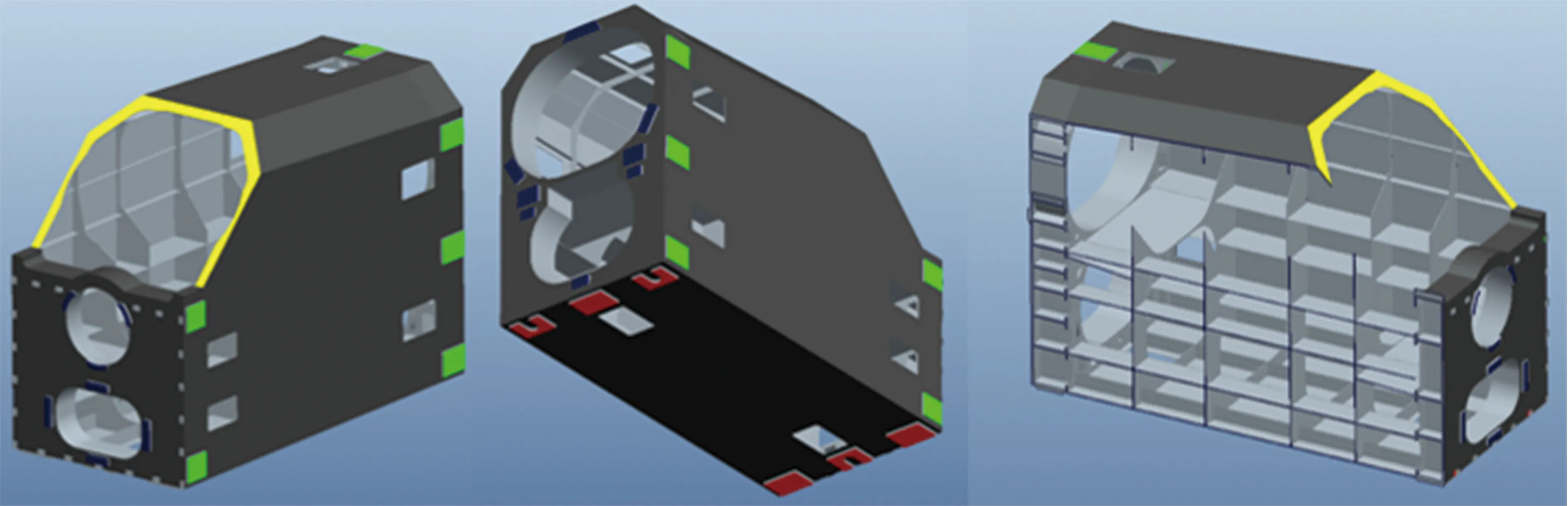
图7 高稳定性箱式主框架示意图Fig.7 Highly stable main frame
2.4 焦面探测器拼接稳定性设计
前视焦面采用7 μm像元的全色TDICCD器件4片进行拼接,后视相机采用全色7 μm多光谱28 μm的TDICCD器件3片进行拼接。拼接方式采用反射镜光学拼接,形式如图8所示。

图8 前视焦面组件Fig.8 Focal assembly of front camera
相机在每组CCD器件背面并列安装2根CDRG-NH3-O1-10×Φ5(J)的小型热管,热管翅片宽度6 mm,引出端铣掉翅片通过转接铝块与散热板直接相连,如图9所示。

图9 前视相机CCD热管安装方式示意图Fig.9 Thermotube of front camera CCDs
对于拼接基框而言,重点考虑材料的导热率和线膨胀系数。目前拼接基框常用的材料主要为钛合金材料,钛合金材料的导热系数很低,仅为5.44 W/(m·K),热膨胀系数很高,为9.1×10-6K-1。从材料热膨胀系数及热导率考虑,如果使用TC4加工结构,难以满足其拼接基框的设计技术指标。殷钢材料的线膨胀系数能满足要求,虽然此材料密度大,可能导致焦面质量很大,由于其良好的热稳定性和较好的刚度,故选用殷钢作为拼接基框的材料。
2.5 高精度热控技术
温度梯度及温度波动导致空间相机光机结构变形,从而影响相机的成像品质、内方位元素的稳定性和夹角的稳定性。为此,必须通过高精度热控设计为光机结构提供合适的工作温度环境,保证整个相机的稳定性,在使用可获取的、可使用的最低膨胀系数材料情况下,为满足内方位元素稳定性要求,温度梯度及温度水平变化不大于0.2 ℃。
双线阵相机结合热管理思想进行光、机、热一体化设计,优化整体热控方案。具体采用的方法有:①采用高精度热控算法进行区域温度场多回路耦合热控分析,优化控温回路布局、控温功率,以有限资源实现高效控温,通过间接控温方案设计保证光学组件高温度稳定性;②采用可展开遮光罩,避免阳光会照进主框架内部,导致相机局部温度波动较大;③外面首次采用双多层,减弱外热流的影响,采用双层销钉固定,内外多层间有一定间隙,不允许搭接;④部件间采取严格的隔热措施,降低区域间影响。
受火箭整流罩限制,前视相机固定遮光罩结构尺寸受限,无法保证在轨运行时卫星侧摆7°情况下太阳光始终不能直接通过入光口照射到主框架内部,因此采用了可展开遮光罩设计技术,为国内航天相机首次应用[14-18]。
可展开遮光罩支撑结构折叠与展开利用了豆荚杆原理,即豆荚杆在自由折叠状态下仅发生弹性变形,不发生塑性变形,自由折叠弹性变形在解除约束后豆荚杆能够自动释放能量恢复平直状态,因此可展开遮光罩的展开无需外界能量驱动。蒙皮利用了薄膜结构的柔性特性,厚度足够小时蒙皮自由折叠后不会发生塑性变形,并且在无重力环境下极小的外力作用即可展开。收拢锁定利用了绳系结构原理,即绳系没有刚度,只能受拉不能受压,一旦拉伸载荷消失后绳系结构可以任意自由移动,因此锁紧绳在拉紧时能够抵抗支撑结构的展开力以保持收拢状态,一旦被两个火工切割器中任意一个切断后,锁紧绳上的拉伸载荷立即消失,锁紧绳在展开结构展开力的作用下随蒙皮自由移动,锁定状态即被解除。图10给出了可展开遮光罩的示意图。

图10 可展开遮光罩方案示意图Fig.10 Fold-unfold hood
3 相机稳定性仿真分析
设计完成后,对相机在轨的稳定性进行了仿真分析。卫星运行于太阳同步轨道,轨道高度506 km,每轨时间95 min。分析共设置3个工况,见表3。低温工况对应寿命初期夏至日,外热流最小,多层隔热组件未发生退化,此时为全寿命周期内相机工作温度最低状态。高温工况对应寿命末期冬至日,外热流最大,同时考虑了寿命末期主动热控措施的退化,此时为全寿命周期内相机工作温度最高状态。另外计算了春分工况,对应在轨一般成像条件。每种工况下,相机工作15 min,每1 min输出1次温度场,计算该时刻内外方位元素,最后给出成像期间内外方位元素连续变化情况。以上工况,覆盖了相机在轨全寿命周期内的低温、常温、高温工作状态,通过这3种状态的分析,能够代表在轨成像期间,和长期的稳定性。图11给出了相机分析的有限元模型[19-21]。

表3 分析工况汇总表Table 3 Analysis conditions
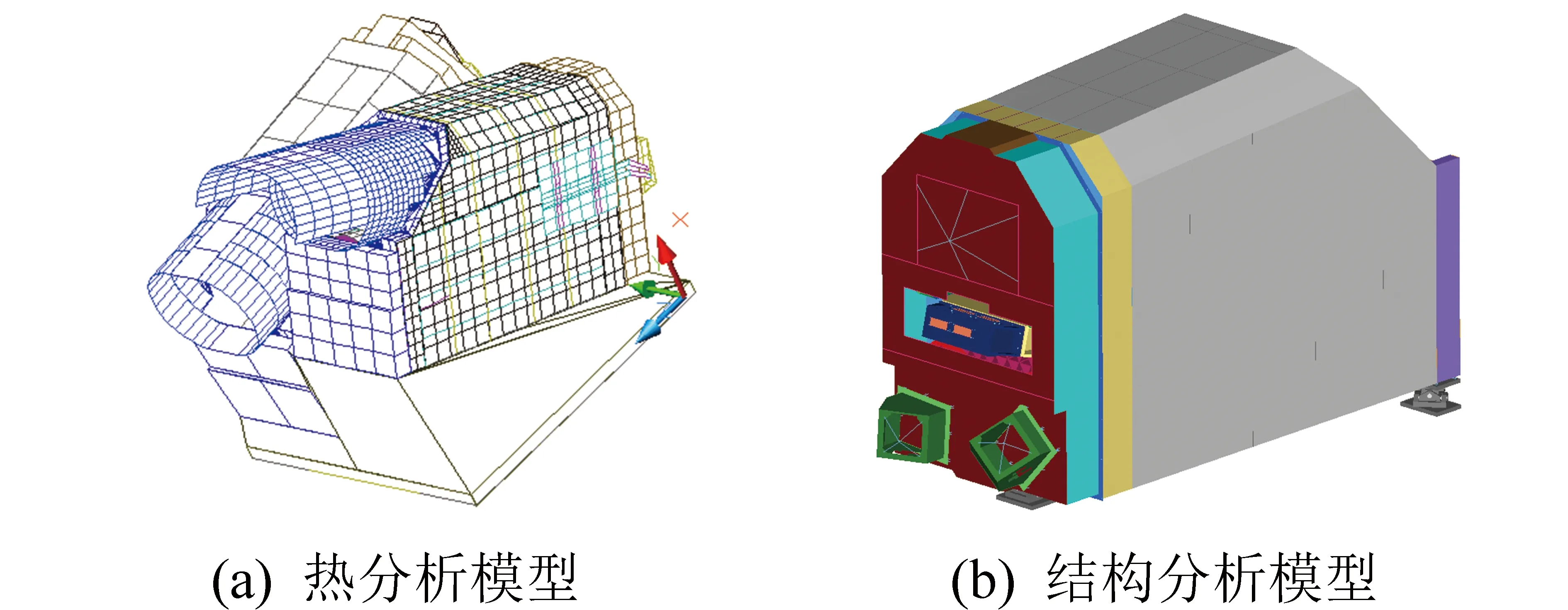
图11 相机分析模型Fig.11 Analysis model of camera
限于篇幅,本文只给出了前、后视两台相机中的前视相机部分工况的计算结果。图12给出了相机的温度场分布图,图13给出了相机的变形云图,表4给出了内方位元素的变化量,表5给出了外方位元素的变化量。
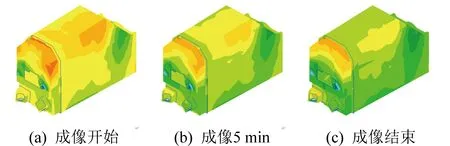
图12 工况1成像过程中前视相机温度场分布Fig.12 Temperature field of front camera during imaging at condition 1

图13 工况1成像过程中前视相机变形云图分布Fig.13 Deformation field of front camera during imaging at condition 1
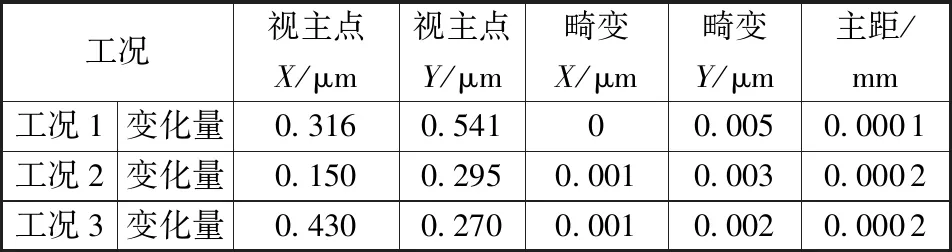
表4 各工况相机内方位元素变化量Table 4 Interior orientation elements of camera at each conditions
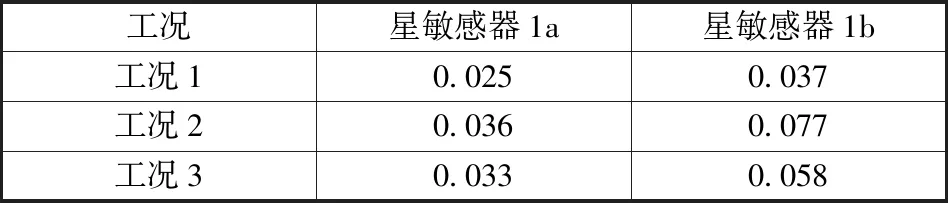
表5 各工况相机外方位元素变化量Table 5 Outer orientation elements of camera at each conditions (″)
由分析可知,内方位元素各项参数变化量均较小,其中,视主点受温度变形影响最大,主距和畸变对温度不敏感,几乎没有变化。满足在轨单次工作期间,单台相机畸变的稳定性优于0.3像元,主点飞行方向上稳定性优于0.3像元,线阵方向优于1像元的要求。相对于均匀温升,温度不均匀导致的梯度对于相机内方位元素影响较大,主要原因是温度梯度使反射镜发生了微小偏转。
利用工况1和工况2的数据进行相减,即比较低温工况与高温工况的夹角数据,可以得到相机外方位元素在轨长期稳定性结果。可以发现,在轨长期工作过程中,转角变化量不超过1″,满足长期稳定性2″的指标要求。
4 结论
综合本文的论证,结合相机研制过程中试验前后的测试及卫星在轨测试结果可以得出如下结论:
(1)精度要求越高的测绘相机,需要从设计阶段就结合卫星实际状况进行分析和制定方案,并在详细设计的细节处体现关键环节的把控,综合考虑光、机、热、材料等因素,从而满足产品的要求。
(2)高分七号双线阵相机设计之初误差分析的方法正确,推导过程合理,设计采取的措施有效。
(3)高分七号相机在轨图像质量良好,各项指标满足或者优于技术指标要求,相机设计中对关键环节的把控准确,是取得好成绩的前提。
猜你喜欢
新能源科技(2022年9期)2022-11-20
云南画报(2021年11期)2022-01-18
科学与技术(2019年12期)2019-03-29
高等建筑教育(2017年2期)2017-05-17
小学生时代·大嘴英语(2015年7期)2015-11-23
现代语文(学术综合)(2015年2期)2015-03-13
科学时代·上半月(2013年9期)2013-09-16
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16