基于载荷共基准的高分七号卫星构型设计与验证
2020-07-15 09:33卢清荣徐庆鹤殷亚州罗文波钱志英白刚
航天器工程 2020年3期
卢清荣 徐庆鹤 殷亚州 罗文波 钱志英 白刚
(北京空间飞行器总体设计部,北京 100094)
高分七号(GF-7)卫星是我国首颗民用亚米级高分辨率光学传输型立体测绘卫星,卫星兼有测绘和资源调查功能,用于1∶10 000比例尺立体测图及更大比例尺基础地理信息产品的生产和更新,以及开展国土资源调查与监测。高分七号卫星包含2种有效载荷:双线阵相机和激光测高仪。卫星载荷质量大、数量多,在轨工作环境要求高,总装时间短的特点对整星构型布局设计提出了新的需求,也给卫星的总装设计及实现带来了新的挑战[1-2]。
本文针对高分七号卫星的特殊需求,在传统遥感卫星构型设计的基础上,研究了卫星构型特点,提出了适应卫星载荷高精度的构型设计方案,可为我国未来卫星构型设计提供参考。
1 卫星构型布局需求分析
1.1 高精度测绘要求
高分七号卫星采用双线阵测绘体制,测绘工作方式如图1所示。卫星可连续观测获取地面重叠影像,可实现条带成像,用于获得立体影像。激光测高仪在1景影像内可获取18个激光测量点数据,用于对地理条件恶劣的地区,在少控制点情况下,进一步提高卫星的高程定位精度。
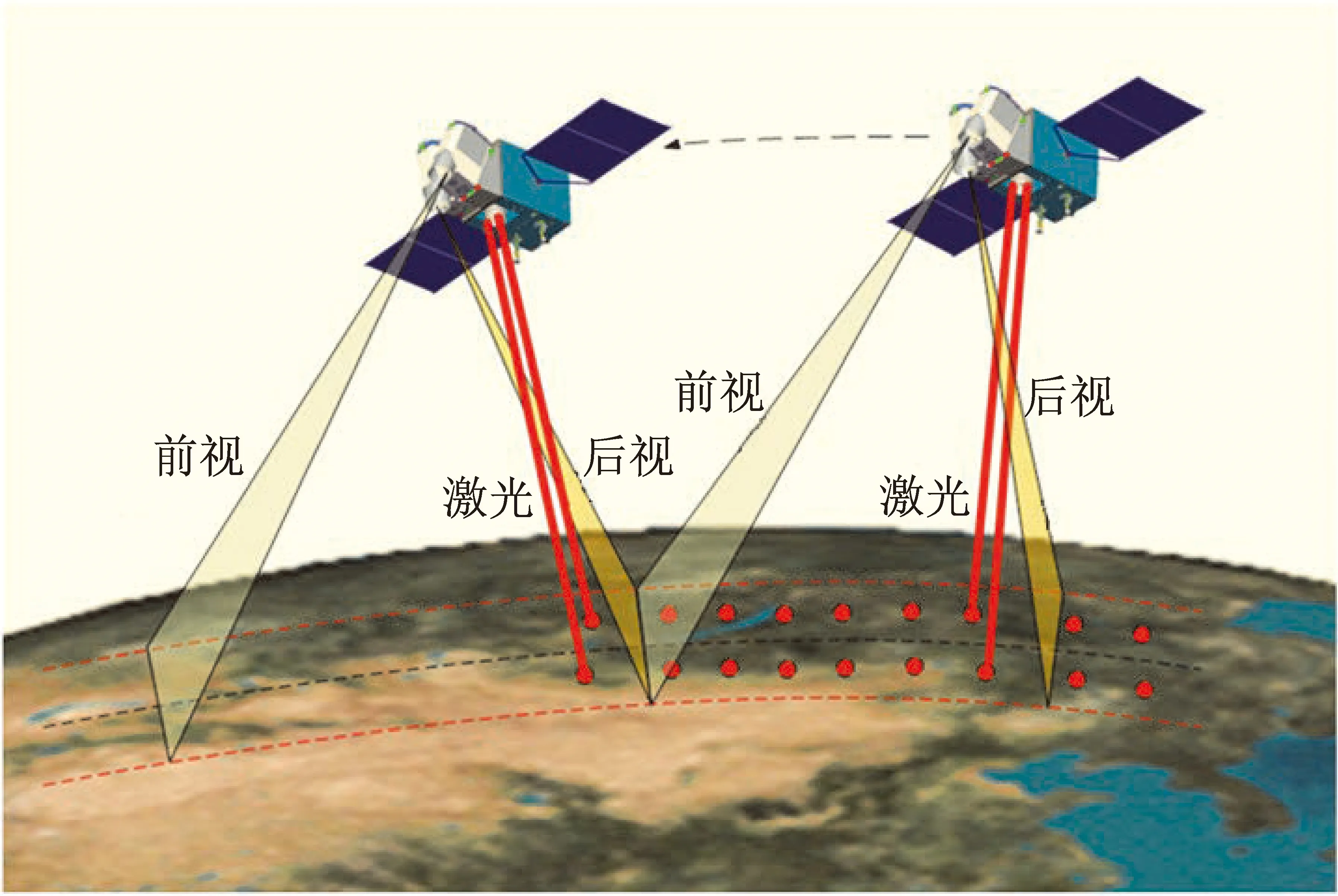
图1 高分七号卫星测绘工作原理示意图Fig.1 Sketch map of the operating principle of the GF-7 satellite
高分七号卫星的测图精度由资源三号(ZY-3)卫星的1:50 000提升到1:10 000,无控制点定位精度由100 m提升到20 m,有控制点定位精度平面由25 m提高到5 m,高程精度由5 m提升到1.5 m,由此对卫星设计在ZY-3的基础上又提出了更高的要求,具体见表1。

表1 高分七号与资源三号技术指标对比Table 1 Comparison of technical indicators between ZY-3 and GF-7
针对1:10 000比例尺测绘精度要求提升导致的卫星总体设计要求变化,需要将一体化支架为整星成像测绘任务基准,双线阵相机、激光测高仪、陀螺均安装在一体化支架上。选择星敏感器作为姿态测量部件,为提高相机在轨光轴指向确定精度,缩短相机与星敏感器间的结构连接路径,将星敏感器与双线阵相机进行一体化设计。
1.2 ZY1000B平台强适应要求
高分七号卫星构型基于资源三号卫星平台状态,卫星由星本体和太阳翼两部分组成(见图2)。星本体采用分舱设计,包括载荷舱和服务舱两部分,在总装期间为整星测试。根据双线阵相机和激光测高仪技术状态进行了适应性设计,因后续多颗卫星均采用高分七号卫星平台产品基线,在构型设计时需考虑平台对后续卫星的继承性及适应性[3-4]。

图2 GF-7卫星构型示意Fig.2 Configuration of GF-7 satellite
2 卫星构型布局设计
2.1 载荷共基准构型设计
为保证1:10 000测绘精度,根据双线阵相机(单台305 kg,共2台)和激光测高仪(295 kg)技术状态,同时考虑测绘卫星对稳定性的要求,在载荷舱顶部设置一体化支架。以一体化支架为整星成像测绘任务基准[5],将双线阵相机安装在一体化支架+X面,激光测高仪吊装在一体化支架-X面,确保双线阵相机和激光测高仪共基准,如图3所示。

图3 载荷共基准构型示意Fig.3 Configuration of common reference payload
一体化支架采用M55J高模量碳纤维复合材料模压工艺制成,具有良好的热稳定性,有助于保持3台主载荷相互之间以及与姿态敏感器之间的在轨夹角稳定性。支架设计成截面工字梁、厚度4 mm的框架结构,材料选用M55J/BS-4,外形尺寸1780 mm×1980 mm×842 mm。一体化支架-X面与载荷舱结构板连接,从底面向上100 mm高的基准面上设计4处凸台,形成两台相机俯仰角关系,如图4所示。
2.2 星敏感器与双线阵相机一体化构型布局设计
为保证卫星相机在轨光轴指向的确定精度,除要求相机与星敏感器实施在轨标定外,还需要从总体构型布局设计方面进行保障。为最大限度减小有效载荷与星敏感器在发射段及在轨飞行期间的热变形,以及在轨期间结构热变形的同步性,必须将有效载荷与星敏感器安装于同一主结构;同时,需保证主结构的强度与刚度,以此来降低二者之间的相对形变;此外,结构要满足一定的精度要求,提供结构精度基准,保证有效载荷与星敏感器安装所需要的特殊安装精度;为进一步提高星敏感器相对双线阵相机的连接刚度,实现共基准安装,星敏感器支架采用碳纤维复合材料,在保证连接刚度的基础上,实现了结构的轻量化。卫星共配置4台星敏感器,星敏感器与双线阵相机一体化安装布局,其中其中:两台进口星敏布局在后视相机-Z面,两台国产星敏布局在前视相机-Z面,如图5所示。

图5 星敏感器与相机一体化安装布局Fig.5 Integrated installation of star sensor and camera
2.3 ZY1000B平台模块化构型设计
根据卫星平台强适应的需求,整星构型采提出“π”平台方案,通过数传下移、模块化布局等方式实现两舱对接面以下π弧度空间内集成所有平台产品[6]。
卫星采用模块化的“π”平台分舱段构型设计,即利于服务舱在后续星的继承使用,也有利于有高分七号卫星将载荷舱空间得到释放,大幅增加载荷可布局空间,实现3台大型载荷,4个星敏感器,3个陀螺的一体化、集成式布局。载荷舱的独立设计,可以使后续型号有效载荷更灵活地根据用户的需求而进行定制、改变,且易于实现载荷舱的布局、总装和测试。
卫星整星发射质量2699.5 kg,卫星本体为立方体构型,横截面尺寸为1980 mm×1780 mm。服务舱高度为1.6 m,载荷舱高度为1 m。卫星±Y面均安装太阳翼,发射时,太阳翼折叠收拢压紧在卫星两侧,发射状态卫星的轮廓尺寸为Φ2.9 m×5.1 m,卫星发射状态构型如图6所示;入轨后,卫星太阳翼展开状态的横向尺寸为11 m,卫星入轨太阳翼展开状态构型如图7所示。

图6 卫星发射状态构型Fig.6 Configuration of launch

图7 卫星飞行状态构型Fig.7 Configuration of flight
3 卫星构型布局设计结果分析与验证
3.1 整星刚度分析与验证
高分七号卫星整星采用服务舱+服务舱的构型形式,其中服务舱基本结构布局基于资源三号卫星平台状态并根据产品状态进行适应性更改;载荷舱结构和服务舱结构通过载荷舱底板与服务舱承力筒上端框进行连接。整星传力路径为相机通过一体化支架传递到载荷舱隔板及载荷舱外板上,载荷舱隔板通过主承力接头及承力筒加强角盒,传递到承力筒上,整个一体化支架、载荷舱隔板、载荷舱底板、承力筒、对接段为主传力路径,部分载荷通过载荷舱外板传递到隔板、载荷舱底板传至到承力筒上(见图8)。卫星经历了力学试验验证,整星纵向基频为45.31 Hz,横向基频为10.2 Hz和10.5 Hz,均满足运载火箭的基频要求。同时卫星的成功发射亦验证了整星构型布局设计的合理性。
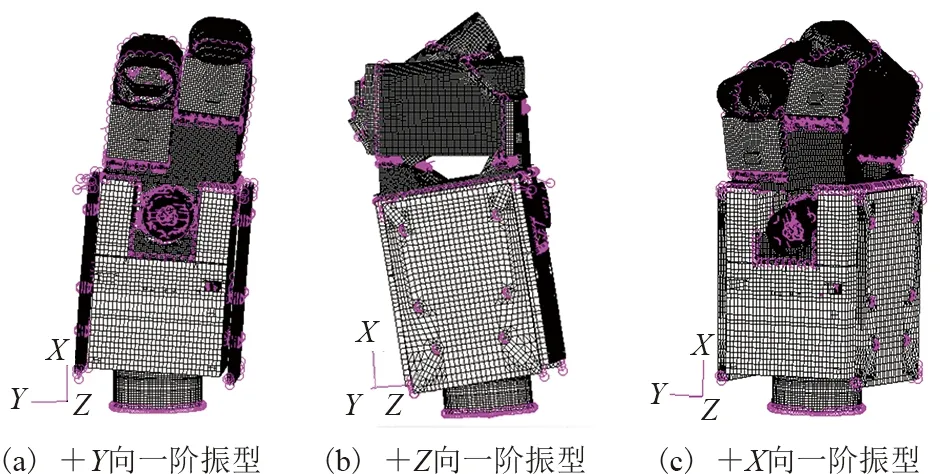
图8 整星一阶振型Fig.8 First order modal pattern of satellite
3.2 运载相容性分析与验证
长征-4B(CZ-4B)Y38火箭用于执行GF-7卫星发射任务,同时采用支承舱侧壁搭载的方式搭载3颗小卫星。高分七号卫星加注后整星质量为2699.5 kg,轮廓尺寸为Φ2.9 m×5.1 m,卫星满足运载火箭的质量约束和整流罩内包络尺寸约束。卫星与整流罩许用包络最近距离为9 mm,与进入星箭共用区的搭载星最近距离为182 mm,距搭载星最近距离为263 mm,如图9所示。卫星与运载火箭在上海顺利对接、太原卫星发射基地发射成功验证了整星构型尺寸及布局设计的合理性。

图9 卫星在整流罩内的发射状态Fig.9 Launch state in fairing
3.3 载荷共基准稳定性分析与验证
高分七号卫星设计以一体化支架为整星成像测绘任务基准,双线阵相机、激光测高仪均安装在一体化支架上实现共基准,同时对一体化支架进行整个结构的高精度温控,减少热变形对设备间夹角稳定性的影响。
研制过程中一体化支架、载荷舱联合相机共同开展了热稳定试验,如图10所示,通过在试验对象上制造温度拉偏,测量各种温度工况下载荷舱结构和一体化支架变形信息,获得相机安装面及相机夹角变化情况。依据载荷舱(含一体化支架)与相机组合体热稳定性试验结果、正样一体化支架设计验收结果,修正有限元分析模型,开展了正样一体化支架前视相机和后视相机安装面的稳定性分析[7-8]。

图10 热稳定性试验Fig.10 Thermal stability test
根据热稳定性试验结果和仿真分析结果综合计算可知,成像期间前后视相机视轴夹角稳定性为0.58″,可满足成像期间前后视相机视轴夹角稳定性优于1″的指标要求,一个标定周期内前后视相机视轴稳定性预估为1.08″(见表2)。

表2 前后视相机视轴夹角稳定性Table 2 Stability of the angle between the payloads (″)
3.4 星敏载荷一体化设计稳定性分析与验证
为保证星敏感器与相机之间的夹角稳定性,通过星敏感器支架设计和高精度温控,要求成像期间夹角稳定性应优于0.5″,在轨长期(一个标定周期内对同一区域成像)夹角稳定性优于2″。
为保证星敏感器指向降低外热流对星敏感器支架的影响,设计了星敏感器支架外罩,正样相机热平衡试验结果见表3,平衡态温度稳定度0.06 ℃。根据试验结果修正热分析模型,分析得出成像期间星敏感器夹角最大变化量为0.21″,一个标定周期内过同一纬度星敏感器夹角最大变化量为0.63″,满足稳定度要求,分析结果见表4。

表3 星敏感器支架温度Table 3 Temperature of the star sensor bracket ℃

表4 星敏感器指向变化情况分析结果Table 4 Variation of the star sensor axis
3.5 总装与测量实施性分析与验证
高分七号卫星有效载荷布局在载荷舱,数传分系统布局在服务舱,有效载荷与数传分系统连接的电缆使用2711型电缆,这种电缆不能使用过渡插头,若每次分舱必须断开所有该种电缆插头,拆下电缆位于载荷舱的部分,为总装和电测带来多余工作量,降低卫星总装测试效率。卫星采用两舱对接状态下的总装方式,即取消两舱分解总装状态。
在总装过程中,卫星两舱外板不安装,先进行有精度要求设备的安装及调测,然后再进行舱内设备安装。星上有精度要求的设备主要为控制、推进、有效载荷分系统设备。舱内精测设备通过在外板设置相应精测通路及转移基准即可满足总装测量需求。
双线阵相机与激光测高仪的安装属于大质量、大尺寸、高精度、小空间的星上产品装配,总装提出了机器人结合柔性力控的解决方案,建立了重型机器人精密装配系统,并对前后视相机及激光测高仪进行了数次装星操作,保证了双线阵相机与激光测高仪安装精度1′的要求。
卫星整个卫星总装、集成和测试过程中均顺利完成,验证了构型布局设计的合理性。
4 结论
本文分析总结了高分七号卫星构型总装特点,介绍了基于载荷共基准的卫星构型设计方案,有效满足了卫星指标及总装需求。结果表明:①卫星载荷共基准构型成像期间,前后视相机视轴夹角稳定性为0.58″,可满足成像期间前后视相机视轴夹角稳定性优于1″的指标要求;成像期间星敏感器夹角最大变化量为0.21″,满足星敏感器成像期间夹角稳定性应优于0.5″的指标要求;②卫星采用模块化的“π”平台分舱段构型设计,实现了服务舱在后续星的继承使用,增强了平台的强适应性;③卫星构型布局设计的合理性与正确性,在卫星总装与测量、综合测试、力/热试验考核、卫星发射与在轨运行等各阶段均得到了验证,亦为我国后续高精度测绘卫星的构型布局设计提供了参考。
猜你喜欢
江西师范大学学报(自然科学版)(2022年3期)2022-10-18
军民两用技术与产品(2022年3期)2022-06-05
军民两用技术与产品(2022年1期)2022-06-01
航天返回与遥感(2022年2期)2022-05-12
汽车实用技术(2022年4期)2022-03-07
汽车工程学报(2021年3期)2021-06-16
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
百科探秘·航空航天(2021年12期)2021-01-15
语数外学习·高中版上旬(2020年8期)2020-09-10
新高考·高一数学(2019年1期)2019-04-15