
基于瞳孔直径的交通冲突量化方法
2020-05-08 05:08李世武王玉琼马晓田
江苏大学学报(自然科学版) 2020年2期
徐 艺, 李世武, 王玉琼, 马晓田
(1. 山东理工大学 交通与车辆工程学院, 山东 淄博 255000; 2. 吉林大学 交通学院, 吉林 长春 130022)
传统交通冲突评价方法[1-6]主要将刻画道路交通状态的车头时距、车头间距、减速时间、侵入时间等时空参数作为交通冲突的量化指标[6-11].但是,时空参数无法反映驾驶人对交通冲突的主观感受,使交通冲突量化结果无法与驾驶人认知保持一致.
近年来交通领域对眼动特征的研究为寻找可反映驾驶人心理负荷的交通冲突量化指标提供了新的方向.文献[12]研究结果表明视觉搜索行为不具有随机性;文献[13]分析了不同驾驶次任务下的视觉搜索规律,构建了次任务驾驶安全评价模型;文献[14]研究了出现对向车流时的视觉搜索规律;文献[15]重点研究了高速公路驾驶状态下视觉搜索区域的分布规律;文献[16]研究了交叉口处视觉搜索区域规律,分析了影响交叉口行车安全的因素;文献[17]得到了高速公路超车过程中注视、扫视等视觉搜索参数的变化规律;文献[18]明确了各视觉指标在车道保持阶段与换道意图阶段具有显著性差异并建立了换道意图预测模型;文献[19]通过研究驾驶人识别行人时的认知过程开发了基于增强学习的夜视系统;文献[20]基于道路消失点建立了自上而下的视觉搜索区域显著性模型;文献[21-22]研究了多种路段交通冲突环境下驾驶人的视觉搜索规律,提出了基于视觉搜索规律的路段交通冲突辨识方法.
分析已有驾驶人视觉搜索规律研究发现,驾驶人瞳孔直径会随交通环境变化而变化,而瞳孔直径亦可反映驾驶人心理负荷.因此,文中尝试使用可反映驾驶人认知状态的瞳孔直径对道路交通冲突进行量化,以提高冲突量化结果与驾驶人认知的一致性.
1 瞳孔直径与交通冲突的关系
1.1 冲突试验
为减少偶发因素对冲突试验的影响,使用驾驶模拟器模拟道路交通环境与驾驶操作环境.使用Smart Eye Pro眼动仪采集驾驶人眼动数据.已有研究表明,瞳孔直径会受到光照影响.为明确瞳孔直径与光照的关系,使用TES-1339R型照度计采集驾驶人眼部附近照度数据.试验过程中,驾驶环境由驾驶模拟器模拟,照度计感光体置于距驾驶人较近位置以采集照度数据,将眼动仪相机安装于驾驶人前方以采集驾驶人眼动数据,使用照度计和眼动仪的上位机数据采集软件同步采集环境照度数据和驾驶人眼动数据.驾驶模拟器、眼动仪相机、照度计如图1所示.
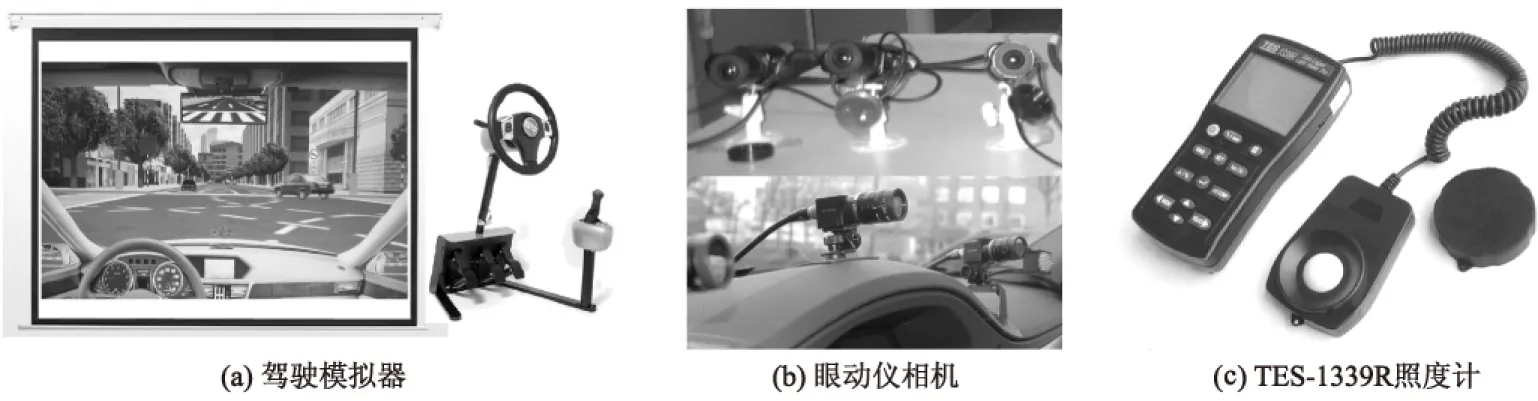
图1 仪器图片
设置驾驶模拟器的试验车型为捷达轿车,道路线形为直线.设置直线加速距离为50 m,保持匀速行驶及制动的距离为300 m.设置固定物冲突、追尾冲突、正向冲突、横穿冲突4种冲突场景.固定物冲突试验中,将固定障碍物设置试验场景中道路末端的交通路锥;追尾冲突和正向冲突试验中,与试验车发生冲突的道路使用者为静止的捷达轿车;横穿冲突试验中,与试验车发生冲突的道路使用者为女性行人.交通冲突试验如图2所示,仿真场景如图3所示.

图2 交通冲突试验示意图

图3 交通冲突试验仿真场景
1.2 交通冲突对瞳孔直径的影响
1.2.1推断性统计分析
为明确照度对瞳孔直径的影响,假设不同照度水平的样本所对应各总体的均值相等,指定显著性水平α=0.05,通过χ2拟合优度正态性检验、Bartlett方差齐性检验和单因素方差分析对瞳孔直径均值进行假设检验,假设检验结果如表1所示.由表1可见,检验结果拒绝原假设,即照度水平对瞳孔直径有显著影响.

表1 照度与瞳孔直径的方差分析表
为明确冲突严重程度对冲突时段瞳孔直径的影响,假设不同冲突严重程度的样本所对应各总体的均值相等,指定显著性水平α=0.05,通过χ2拟合优度正态性检验、Bartlett方差齐性检验和单因素方差分析对瞳孔直径均值进行假设检验,假设检验结果如表2所示.

表2 冲突严重程度与瞳孔直径的方差分析表
由表2可见,检验结果拒绝原假设,即冲突严重程度对瞳孔直径有显著影响.
1.2.2描述性统计分析
分析瞳孔直径均值、标准差以期得到瞳孔直径数据的集中趋势规律和离散程度规律.不同冲突严重程度情况下,瞳孔直径均值标准差如表3所示,瞳孔直径均值标准差分布如图4所示.

表3 瞳孔直径均值及标准差 mm

图4 瞳孔直径均值标准差分布
由图4可见,瞳孔直径均值随冲突严重程度的增大而变大,瞳孔直径标准差随冲突严重程度变化规律不明显.说明驾驶过程中,交通冲突造成的认知负荷与心理压力的增加会导致驾驶人瞳孔直径均值变大.
2 基于瞳孔直径的交通冲突量化方法
2.1 交通冲突量化流程
由瞳孔直径、照度、交通冲突的统计分析结果可见,交通冲突严重程度与驾驶人瞳孔直径均值有明显的正相关关系,而照度亦影响驾驶人瞳孔直径均值.因此,为提高基于瞳孔直径的交通冲突量化方法的准确性,首先建立各驾驶人的照度-瞳孔直径模型,然后对采集到的冲突环境下驾驶人瞳孔直径数据进行基于照度-瞳孔直径模型的数据补偿,最后计算样本瞳孔直径与标准瞳孔直径的差值,并将差值用于冲突量化,基于瞳孔直径的交通冲突量化方法流程如图5所示.

图5 基于瞳孔直径的交通冲突量化方法流程图
2.2 交通冲突量化方法
基于瞳孔直径的交通冲突量化方法如下:
1) 驾驶人选择与模型判断.选择驾驶人,判断是否已有该驾驶人的照度-瞳孔直径模型,若无照度-瞳孔直径模型,则进行步骤2),若有照度-瞳孔直径模型,则进行步骤4).
2) 标准瞳孔直径数据生成.在固定照度为L且无交通冲突刺激的环境下,采集t2时长内的瞳孔直径数据d1,对采集到的瞳孔直径数据d1进行平均化处理,生成瞳孔直径标准数据d2,则
d2=d1/t2,
(1)
进行步骤3).

4) 冲突量化数据采集.采集驾驶人实车驾驶或模拟驾驶时的照度数据fe与瞳孔直径数据e2,进行步骤5).
5) 瞳孔直径补偿.根据照度-瞳孔直径模型中照度与瞳孔直径的对应关系对瞳孔直径数据e2进行处理,将非固定照度条件下瞳孔直径数据e2转换为照度为L条件下的瞳孔直径数据e3,完成面向照度一致性的瞳孔直径补偿,进行步骤6).
6) 交通冲突量化.计算e3与d2的差的绝对值之和p,设瞳孔直径数据采样点数目为n,则交通冲突的量化指标为
q=p/n,
(2)
式中:q为交通冲突的量化指标;p为e3与d2的差的绝对值之和;n为瞳孔直径数据采样点数目.
3 方法验证与效果分析
3.1 实车数据采集
为减少复杂、偶发因素的干扰,降低布设交通冲突场景的难度,选择某道路交通参与者数量较少的路段进行实车数据采集.
随机选择一位男性驾驶人和一位女性驾驶人驾驶长城嘉誉2.0AT试验车,以20,30,40 和50 km·h-1初始车速完成固定物、追尾、正向、横穿冲突试验,各驾驶人、冲突严重程度、冲突类型试验均重复5次.实车试验共进行160组,采集有效数据时长共计4 133.256 s.收集每次试验后驾驶人对交通冲突的严重程度的评分.无冲突刺激下的变照度瞳孔直径数据在室内进行,使用HEP SD218-40调光电子镇流器与T8灯管调整驾驶人眼部照度.试验路线、试验车辆、试验场景如图6所示.

图6 试验路线、车辆与场景
3.2 交通冲突量化结果分析
使用文中提出的交通冲突量化方法对采集到的160组实车试验数据进行量化,量化过程中标准瞳孔直径生成步骤的固定照度为L=350 lx,数据采集时长t2=60 s,照度-瞳孔直径模型构建步骤的光源照度区间及步长分别为a=50 lx,b=650 lx,c=10 lx,使用最小二乘法对照度f与瞳孔直径数据g2进行拟合.
将交通冲突量化结果与交通冲突严重程度评分分别进行量纲一化,分析所提交通冲突量化结果与驾驶人主观评价的一致性.量化与评分结果如表4所示,量纲一化结果如表5所示.

表4 冲突量化与驾驶人评分结果

表5 冲突量化与驾驶人评分量纲一化结果
由表4可见,驾驶人对交通冲突严重程度评分以及交通冲突量化所得q值均随车速的提高而增大,且随车速的提高,增大的幅度递减.由表5可见,30与40 km·h-1对应的量纲一化后的q值与主观评分差异小于5%,证明文中所提交通冲突量化方法的量化结果与驾驶人对交通冲突的认知有很高的一致性.
4 结 论
通过对瞳孔直径-交通冲突试验数据的推断性统计分析与描述性统计分析,明确了照度水平和冲突严重程度对瞳孔直径有显著性影响.以此为理论依据,提出了基于瞳孔直径的交通冲突量化方法,且所提量化方法中的照度-瞳孔直径模型可对不同照度下的瞳孔直径进行数据补偿.进行了实车试验并采集了相应瞳孔直径数据、照度数据与驾驶人对交通冲突严重程度的评分数据.通过对比所提量化方法的量化结果与驾驶人评分,证明了所提交通冲突量化方法的量化结果与驾驶人对交通冲突的认知有很高的一致性.
猜你喜欢
中国眼镜科技杂志(2019年5期)2019-07-13
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
青年歌声(2018年2期)2018-10-20
照明工程学报(2018年3期)2018-08-03
照明工程学报(2017年3期)2017-07-10
阅读与作文(初中版)(2017年6期)2017-07-05
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
郑州大学学报(理学版)(2014年4期)2014-03-01
中学生数理化·高考版(2008年2期)2008-11-01
