可穿戴五自由度上肢外骨骼机器人固定时间控制
2020-03-27 11:22张高巍孙建军
控制理论与应用 2020年1期
张高巍,杨 鹏,王 婕,孙建军
(河北工业大学控制科学与工程学院,天津 300130;智能康复装置与检测技术教育部工程研究中心,天津 300130)
1 引言
可穿戴外骨骼机器人因其在军事、医疗、康复等领域具有重大研究意义和广阔市场前景[1-2]而成为机器人领域研究的热点之一.不同于其他种类的机器人,可穿戴外骨骼机器人具有与人体高度贴合,扩展人体机能的特性[3],因此对人机协同控制的要求更加苛刻.由于人机之间存在交互力矩,而人体参数难以准确获取和建模,因此人机系统中不可避免地存在结构参数摄动和外部干扰(综合干扰).除此之外,对于快速响应和准确跟随人体运动意图的要求也使得可穿戴外骨骼机器人轨迹跟踪控制器的设计成为研究的重点问题.
针对外骨骼机器人期望轨迹跟踪问题,国内外学者做了很多研究,取得了一定的成果.文献[4]针对单自由度下肢助力外骨骼机器人轨迹跟踪控制,建立了输入力矩与人机系统运动之间的导纳模型,采用PID控制方法实现对外骨骼机器人的跟踪控制.文献[5-6]针对上肢康复外骨骼提出了自适应阻抗控制方法,实现了干扰条件下对期望轨迹的准确跟踪.然而,传统控制方法很难保证在系统存在较大干扰及参数不确定情况下的控制效果.滑模控制因其鲁棒性好,响应速度快而广泛应用于外骨骼系统控制.文献[7]采用基于饱和函数的滑模控制方法,在系统存在干扰的情况下实现对期望曲线的准确跟踪,但传统滑模切换项是不连续的,导致在实际应用过程中易引起抖振.文献[8]将指令滤波反步滑模控制与模糊估计相结合,在系统存在较大幅值干扰的情况下仍能保持系统稳定,抑制传统滑模中存在的抖振问题.
上述控制算法都只能实现系统的渐近稳定.相比于渐近稳定,有限时间稳定具有更快的收敛速度和更好的抗干扰能力[9-10].文献[11-12]分别采用二阶滑模和非奇异终端滑模控制方法,实现对膝关节外骨骼闭环系统的有限时间稳定控制.但有限时间控制方法的收敛时间会随着系统初始误差的增加而无限增大,在对时间要求严格的应用场合中存在弊端.相比于有限时间稳定,固定时间稳定具备收敛时间与系统初始状态无关的特点,即系统收敛时间存在上界,因而比有限时间稳定的收敛条件更加苛刻[13-14].近年来,固定时间控制受到众多学者关注,被广泛应用于复杂非线性系统控制,如多智能体协作控制[15-16]、单级倒立摆系统控制[17]、运载火箭控制[18]、航天器控制[19-20]等.然而,应用于外骨骼系统的固定时间控制策略尚未被研究.
综上所述,文章在五自由度上肢外骨骼动力学模型的基础上,提出了一种基于观测器的固定时间控制策略并分析了闭环系统的稳定性.考虑到人机系统中存在外部干扰及不确定,采用改进超螺旋算法实现对干扰的在线估计,保证估计误差能在固定时间内收敛至零且收敛时间上界与系统的初始状态无关,进而实现对控制器的补偿;在观测误差值的基础上,设计非奇异终端滑模固定时间控制器,在提高系统收敛速度的同时保证控制律光滑有界;通过与文献[21]所提出的有限时间干扰观测器对比说明所提出算法的有效性和优越性.
2 上肢外骨骼动力学模型
参考人体运动学及动力学特性,一般上肢外骨骼系统应具备5个旋转关节:肩关节的外展/内收、屈曲/伸展,肘关节屈曲/伸展,腕关节屈曲/伸展和前臂旋转,如图1所示.
根据拉格朗日动力学建模方法,五自由度上肢外骨骼模型可表示为[22]


其中qd,∈R5为人体期望的关节角度和角速度.

图1 五自由度上肢外骨骼机器人示意图Fig.1 Schematic diagram of 5 DOF upper-limb exoskeleton
将式(1)微分方程形式转换为状态空间形式,引入系统状态变量x=和期望位置xd=qd,使得x1=q, x2=,则系统的动力学方程可表示为

3 固定时间控制器设计
在控制器设计之前,首先给出必要的定义、假设及引理.
定义1[24]针对系统(3),系统到达平衡点时间T(x0)一致有界,且与系统状态的初始值无关.即

那么系统在固定时间内收敛.
定义2对于n 维向 A=[a1a2··· an]T,B=[b1b2··· bn]T,其Hadamard 积定义为各向量中元素分别相乘获得的新向量,数学表示如下:

假设1系统中综合干扰di(i=1,2,3,4,5)有界,存在未知常数Di∈R+(i=1,2,3,4,5),满足≥Di,即综合干扰可导且导数有界.
引理1[15]考虑非线性系统

如果存在一个正定连续的函数V(x),满足

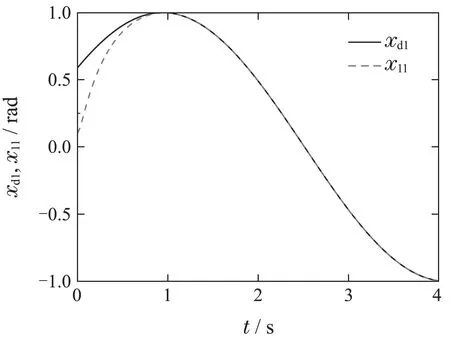
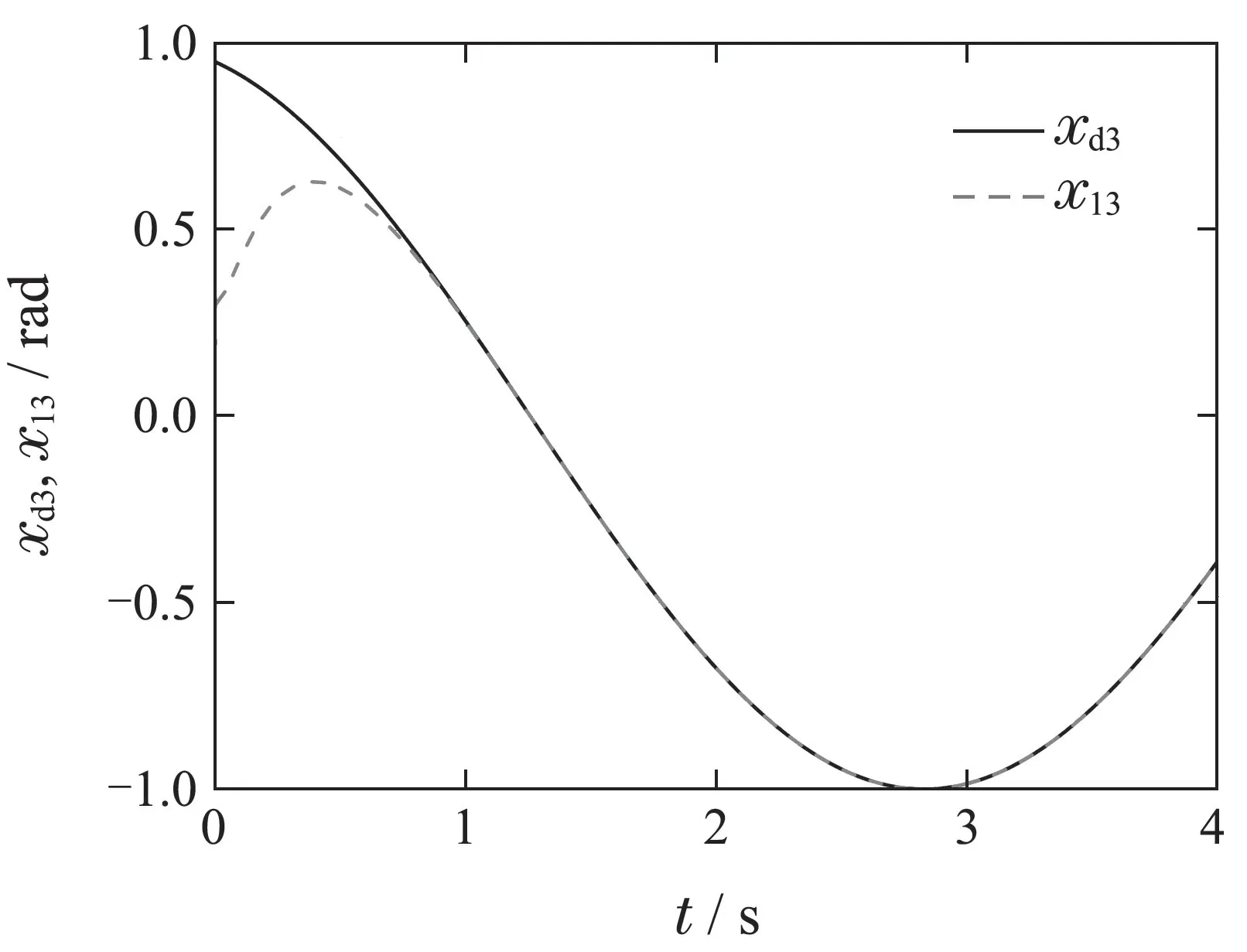
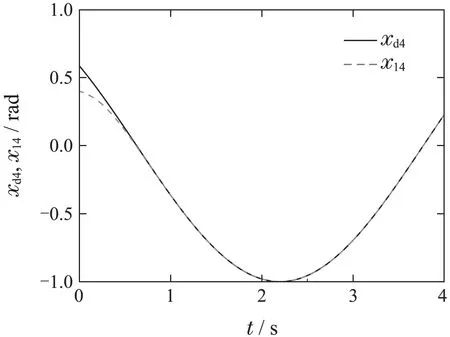
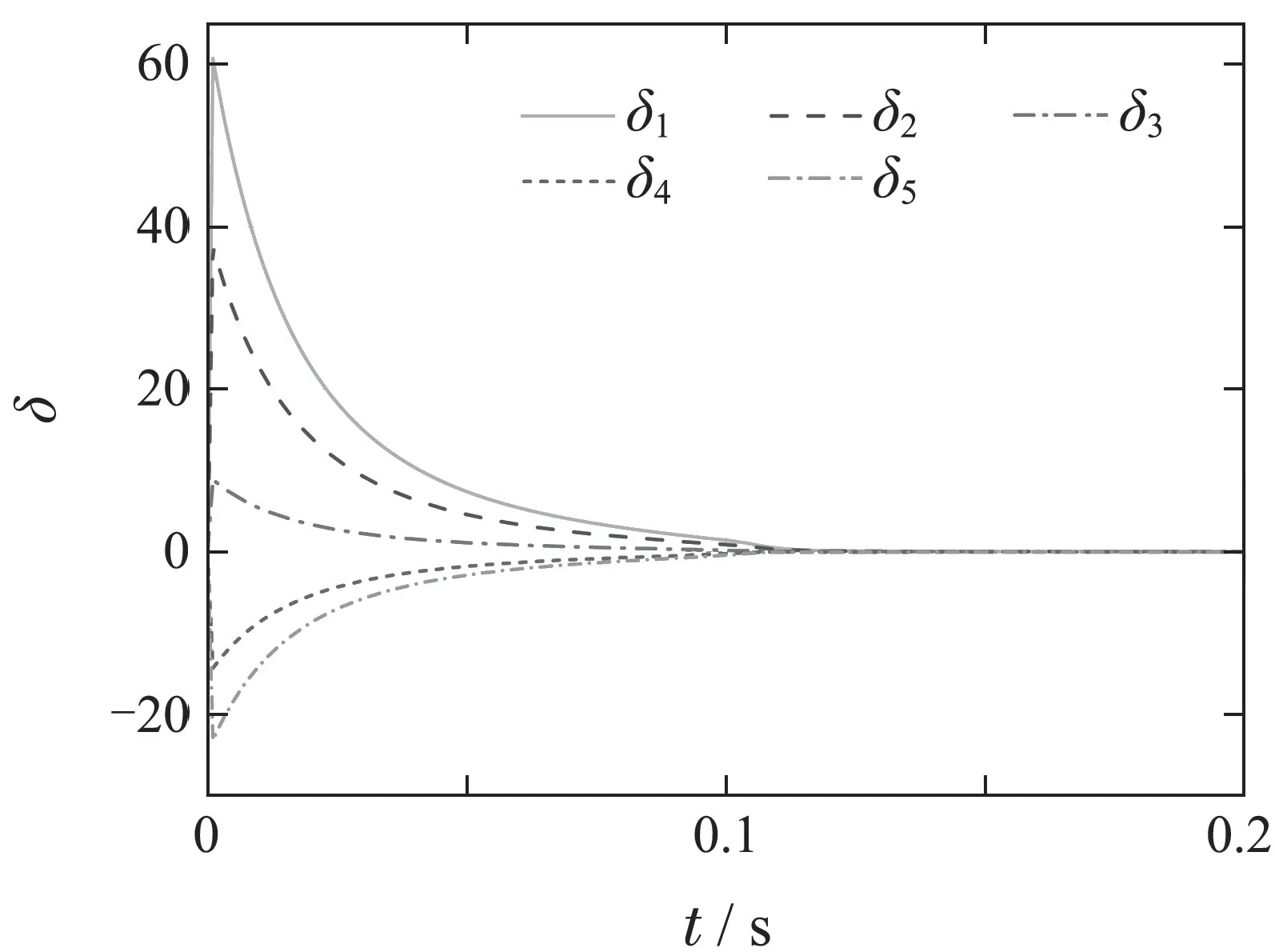
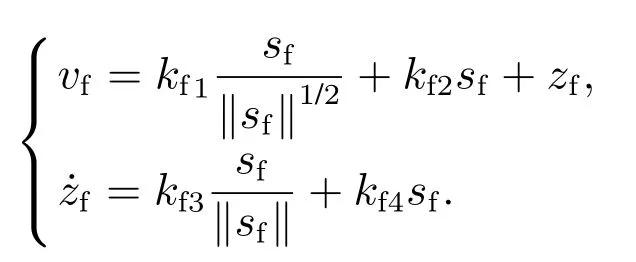
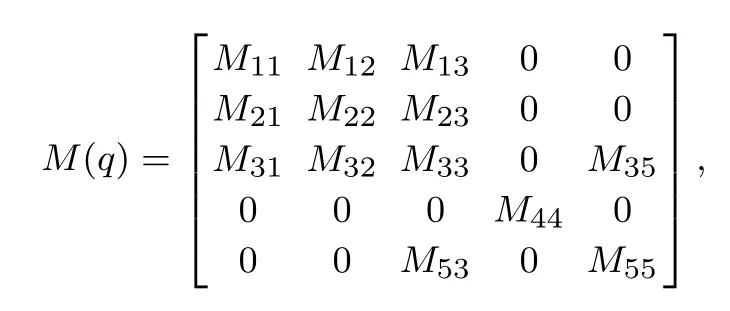
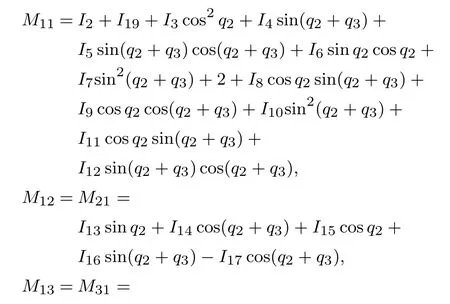
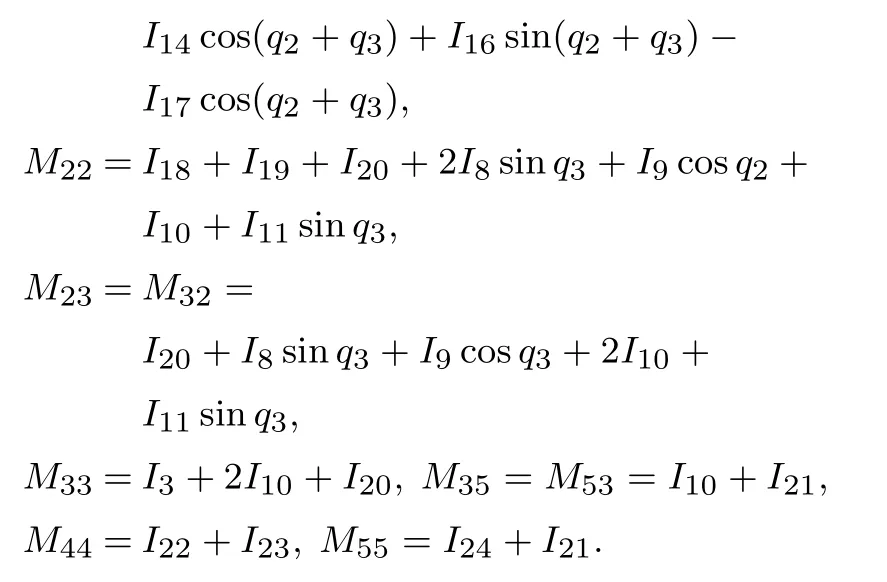
其中α,β,q,p,k∈R+,且pk <1, 1 引理2[25]对于二阶多变量非线性系统 其中:x(t0)=x0, y(t0)=0,参数p>1,ξ(t)存在上界L.那么x(t),可以在固定时间Tmax内收敛到原点,且 其中:ε>0为给定常数,M=g+L, m=g−L为系数,满足条件g >4L,λ1>通过计算可得,当ε=(n1/4λ1/λ2)(1/(p+1/2))时,收敛时间取得最小值. 引理3(Young’s不等式) 若实数p,q满足p>1,q >1且(1/p)+(1/q)=1,则对于任意正实数a,b,存在 引理4(Cauchy-Schwarz不等式) 对于任意实数a1,a2,···,an与b1,b2,···,bn,有 首先设计干扰观测器w,在固定时间内实现对系统干扰的准确估计.通过将干扰估计值反馈给控制器达到对干扰在线补偿的目的. 定义速度跟踪误差为e1=x1−xd,角度跟踪误差为e2=x2−,其中xd,分别为期望轨迹及其导数,则由系统(2)可得 定义固定时间干扰观测器为 引入辅助滑模变量 则 只需证明so,可在固定时间内收敛至原点,则vo=d,即综合干扰的估计值.取 由式(15)-(16),可得辅助滑模面的微分方程为 通过分析可得,当辅助滑模面so远离原点时,−λ2so‖so‖p−1能够保证其快速收敛至原点附近.而项可以保证so由原点附近快速收敛至原点.根据假设1和引理3可知,通过选取适当的λ1,λ2,g和p,vo可以在固定时间To内准确估计干扰值d.且 通过设计控制律u,实现可穿戴上肢五自由度外骨骼机器人在固定时间内对期望轨迹xd∈R5的快速稳定跟踪.即t ≥T, e1=x1−xd=0.选取非奇异终端滑模面函数为 其中:s∈R5为滑模面向量;a>0, b>0为滑模面系数;mi,ni(i=1,2,3,4,5)为正奇数且满足1 为了解决控制过程中可能出现的奇异问题,引入如下非线性函数[26]: 其中η∈R+为设计参数,其对固定时间上界的影响将在后文讨论.对于向量A=[a1a2··· an],定义φ(A)=[φ(a1) φ(a2)··· φ(an)]T. 设计非奇异终端滑模控制律为 其中k1∈R+. 所提出五自由度上肢外骨骼固定时间控制策略结构图如图2所示.其中FT-NTSMC为式(21)所表示的非奇异终端滑模控制器;FTDO为式(13)和式(16)表示的固定时间干扰观测器. 图2 固定时间控制策略示意图Fig.2 Diagram of the fixed time control strategy 定理1对于五自由度上肢外骨骼系统(3)及固定时间干扰观测器(13),通过选取控制律(21)及滑模函数(19),可以使外骨骼系统角度跟踪误差e1,e2在固定时间T内收敛到0并一直保持下去. 证固定时间综合控制策略的稳定性证明过程分为3步. 第1步证明闭环系统状态的有界性,即在干扰观测误差收敛的To时间内,闭环系统状态s,e1,e2有界.将控制律(21)代入到系统误差e2的导数中可得 对滑模面函数(19)按时间微分得 将式(22)代入式(23),则 选取系统状态的Lyapunov函数为 其对时间的导数可以表示为 因此,式(26)可被表示为 根据绝对值定理及柯西-施瓦茨不等式可将上述不等式改写为 注意对于任意正实数δ 以及0<α<1,不等式δα≥1+δ总成立.同时采用引理4可得 将上式结果代入到式(29)中可得 在干扰观测器证明过程中,由式(15)(17)-(18)可知,=d−vo可以在固定时间收敛至零.因此,di−voi(i=1,2,3,4,5)存在上界Lo.采用均值不等式可以将式(31)表示为 对于上式最后一项,可根据滑模函数值分别讨论.由式(20)可得,0 ≥φ(x)≥1.则 当0<|si|≥1, i=1,2,3,4,5时,利用不等式1 当|si|>1时,式(33)可被表示为 则式(33)可表示为 综合式(32)(38)的结果可知 由上式可得,K,La在参数选定的条件下有界.解该微分方程可知,对于给定初值Va(t0),Va=(KVa(t0)+La)e(t−t0)−La.即在干扰观测误差收敛时间To内系统状态保持有界. 第2步证明滑模面的可达性.即对于任意初始状态x0=x(0),所设计的控制律(21)总能保证系统状态能够在固定时间内收敛到滑模面(19)上. 选取Lyapunov函数Vri=|si|,i=1,2,3,4,5,则其对时间的导数可以表示为 由观测器固定时间收敛特性可知,对于任意t>To, di−voi=0,则上式可以表示为 由引理1可得,系统将在固定时间Tr1内直接收敛至0或到达≥η区域内,且 其系统状态运动轨迹如图3所示阶段1. 第3步证明外骨骼系统跟踪误差e1在固定时间内可以收敛到原点.当t>To+Tr时,有s=0.由式(19)可得 选取Lyapunov 函数为Vsi=|e1i|, i=1,2,3,4,5,则其对时间的导数为 由引理1可得,系统跟踪误差e1i将会在固定时间Ts内收敛到零,且 系统状态运动轨迹如图3所示阶段2. 图3 系统相位图Fig.3 Phase plot of the system 根据式(18)(43)-(44)和式(47)可得,上肢五自由度外骨骼系统跟踪误差收敛时间上界为 证毕. 为了验证所提出控制算法的有效性,本文在MATLAB/Simulink环境下搭建系统仿真模型.五自由度外骨骼系统模型形式及具体参数参考文章附录. 期望关节角度xd=[xd1xd2xd3xd4xd5]T为xdi=sin(t+iπ/5),i=1,2,3,4,5.系统关节角度初始值设置为x1=[0.1 0.2 0.3 0.4 0.5]Trad.为了验证干扰观测器的固定时间收敛特性,引入综合干扰 针对本文所设计的固定时间干扰观测器(13)(15)和(16),选取控制增益为g=20, λ1=20, λ2=30,p=1.5.则由引理3可得,当取得最小观测时间上界时,ε=0.998, To=0.644 s,即观测误差值总能在To时间内收敛至原点而与初始值无关.非奇异终端滑模控制器控制增益如表1所示. 表1 控制器增益Table 1 Controller gains 由上述控制器增益与式(43)-(44)和式(47)可知,系统状态由初始位置到达滑模面的固定时间上界为Tr=Tr1+Tr2=3.109 s,由到达滑模面至跟踪误差收敛到原点的固定时间上界为Ts=3.107 s.因此系统最终收敛时间上界为T=6.216 s.仿真结果如图4-11所示. 图4-8为关节角度跟踪曲线.由图可知,本文所提出的固定时间控制策略能够在系统存在参数不确定及外部干扰的情况下,实现对给定期望曲线的准确跟踪且收敛时间均小于1 s.图9为非奇异终端滑模控制器的控制输出,从图中可以看出,所有控制律轨迹均光滑有界且不存在抖振. 图4 关节1位置跟踪曲线Fig.4 Position tracking of joint 1 图5 关节2位置跟踪曲线Fig.5 Position tracking of joint 2 图6 关节3位置跟踪曲线Fig.6 Position tracking of joint 3 图7 关节4位置跟踪曲线Fig.7 Position tracking of joint 4 图8 关节5位置跟踪曲线Fig.8 Position tracking of joint 5 图9 控制律Fig.9 Control laws 为了更准确地反映固定时间干扰观测器及系统跟踪误差动态收敛过程及收敛时间,图10-11分别选取了干扰观测误差在0.2 s内的收敛曲线及系统跟踪误差在2.0 s内的收敛曲线.由图10可知,干扰观测误差能够在短时间(0.12 s)内收敛至原点,即实现对干扰的准确估计.系统跟踪误差最终在1.0 s内到达并维持在原点,表明所提出的控制算法具有很快的收敛速度,见图11.由仿真图可得,本文所提出的固定时间控制策略可效解决综合干扰条件下多自由度外骨骼系统的轨迹跟踪问题. 图10 干扰观测器观测误差Fig.10 Observer errors of the FTDO 图11 位置跟踪误差Fig.11 Position tracking errors 为了验证本文所提出基于改进超螺旋算法的固定时间干扰观测器的优越性,在其他条件保持一致的情况下,仿照文献[21]建立有限时间干扰观测器 其中: 定义sf=e2−wf.取有限时间观测器增益为kf1=60, kf2=30,kf3=40,kf4=40,初值为w(0)=wf(0)=[−200,−100,0,100,200].同时在相同初始条件下选取本文所提出的固定时间干扰观测器做对比.为了保证观测仿真结果在同一量级,选取固定时间干扰观测器的增益为g=20, λ1=20, λ2=10,p=1.5,仿真结果如图12所示. 图12 两种干扰观测器对比Fig.12 Comparison of the two disturbance observers 图12中:δo1表示有限时间干扰观测器观测误差,δo2表示固定时间干扰观测器观测误差.由仿真图可知,对于不同的干扰观测初值,本文所提出的固定时间干扰观测器可以做到对干扰的快速准确估计,估计时间小于0.1 s且不存在过估计.而有限时间干扰观测器在0.07 s附近到达原点后又脱离原点,存在明显的过估计,且总体估计时间约为0.2 s.除此之外,本文所提出的观测器在观测误差远离平衡点时具有更好的收敛特性,这是由于式(16)中λ2so‖so‖p−1项相比于有限时间干扰观测器中的kf2sf具有更快的收敛速度.由此可知,固定时间干扰观测器无论在响应速度还是收敛效果上都具有优越性. 针对外部干扰及参数不确定条件下上肢五自由度外骨骼系统期望关节角度跟踪问题,提出了一种基于观测器的固定时间控制策略.分别基于改进超螺旋算法和非奇异终端滑模算法设计了固定时间干扰观测器和滑模控制器,并进行了仿真验证.仿真结果表明,所提出控制策略能够实现对期望轨迹快速精准跟踪,可以降低外界干扰及参数不确定对控制效果的影响,提高系统的鲁棒性. 附录 外骨骼系统模型参数 文章所使用的五自由度上肢外骨骼系统模型参数如下[22],其惯性矩阵M(q)可表示为 其中: 其中: 重力向量G(q)可表示为 其中: 具体参数取值见表A1和表A2. 表1 A1 惯性常量(kg·m2)Table A1 Inertial constant(kg·m2) 表A2 重力常量(N·m)Table 1 Gravitational constant(N·m)



3.1 固定时间干扰观测器设计




3.2 固定时间终端滑模控制器设计





























4 仿真结果分析
4.1 固定时间控制策略仿真结果





4.2 固定时间与有限时间干扰观测对比仿真


5 结论






 猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08小哥白尼(野生动物)(2021年12期)2021-03-29防爆电机(2020年4期)2020-12-14北京航空航天大学学报(2020年10期)2020-11-14语数外学习·初中版(2020年2期)2020-09-10中学生数理化·高一版(2020年2期)2020-04-21轻兵器(2019年5期)2019-06-21北京航空航天大学学报(2017年6期)2017-11-23电子制作(2017年24期)2017-02-02大众健康(2016年3期)2016-05-31
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08小哥白尼(野生动物)(2021年12期)2021-03-29防爆电机(2020年4期)2020-12-14北京航空航天大学学报(2020年10期)2020-11-14语数外学习·初中版(2020年2期)2020-09-10中学生数理化·高一版(2020年2期)2020-04-21轻兵器(2019年5期)2019-06-21北京航空航天大学学报(2017年6期)2017-11-23电子制作(2017年24期)2017-02-02大众健康(2016年3期)2016-05-31