低风速风力机最大风能追踪的互补滑模控制
2020-03-27 11:21夏亚平李芮宇
控制理论与应用 2020年1期
夏亚平 ,刘 德 ,李芮宇 ,刘 培
(1.湘潭大学信息工程学院,湖南湘潭 411105;2.中国舰船研究设计中心,湖北武汉 430064)
1 引言
近年来,由于人类对化石资源不合理的开采及滥用,能源危机带来的一系列问题接踵而至.化石能源不断衰竭,环境污染日益严重,都迫使人们寻找一种更加清洁、高效的能源以实现可持续发展.风能作为一种可再生能源,相比其他清洁能源来说不仅成本较低,而且安全可靠便于利用,所以对风能的开发和利用就显得尤为重要.风力机作为风力发电的重要组成部分,它将风的动能转换为机械能再转换为电能,因此风力机的输出功率与发电机的输出功率密切相关.同时,风力机的输出功率会随着风速的改变而改变,且存在一个最优转速使得风力机在该风速下达到最大功率输出.所以,对于风力机系统而言,在变化的风速下达到最优转速,获得最大风能捕获从而得到最大功率输出[1],这对风力发电系统的整体效率具有重大影响,因此最大功率点跟踪(maximum power point tracking,MPPT)控制算法一直是风力机研究的热点.
目前,风力机MPPT控制具有多种实现方法[1-18],其中最常用的包括爬山法[3-7]、叶尖速比法[2,7]以及最优转矩法[8,14].除此之外,文献[17]提出了一种具有未知系统参数的非线性自适应控制器,并结合双层神将网络,使得控制过程中的误差维持在一个较小的范围内,并在系统的暂态和稳态性能上取得了不错的效果.在此基础上,文献[18]进一步对系统的暂态和稳态性能进行了优化,提出了一种新型的双馈感应发电机变速风力发电机功率控制策略,该策略采用自适应控制算法,不仅提高了风能捕获效率同时增强了对定子无功功率的调节.
另外,考虑到滑模控制对于系统参数不确定性,外部干扰和未建模动态具有很强鲁棒性,且滑模面具有有限时间可达性等优点[19-20].因此,滑模控制方法也被应用到了风力机MPPT控制中[1,9-14].其中,文献[1]在风力机MPPT阶段采用滑模控制策略,使控制过程中的电磁转矩能较好的跟踪上期望值,并获得了较好的鲁棒性和控制精度.文献[9]为了确保风力机运行过程中的稳定性,采用滑模控制方法进行功率调节,不仅可以保证功率跟踪,同时还能平滑系统的输出转矩.在此基础上,文献[10-11]引入高阶滑模控制,在增强系统鲁棒性的同时获得了更高风能捕获效率.但是这些方法都没有强调转速跟踪的效果.因此,一种模糊积分滑模控制策略被应用到风力机的MPPT阶段[13],该方法通过积分滑模作用减小了转速跟踪误差,在提高风力机抗扰动能力的同时也增大了风能捕获效率.随后,陈等人设计出一种基于最优转矩法的滑模控制器[14],该方法通过在MPPT阶段增大转速跟踪过程中的不平衡转矩,提高了风轮的转速跟踪精度并缩短了系统调节时间,从而获得了较大的风能捕获效率.上述文献从转速跟踪角度出发,对提高风力机MPPT阶段的风能捕获效率做出了相关改进.
虽然滑模控制对于非线性系统具有良好鲁棒性[20],且在风力机MPPT阶段的应用取得了不错的效果,但是为了进一步减小转速跟踪误差,提高转速跟踪精度以获得更高的风能捕获效率,有必要研究提出新的控制方法.
因此,本文对普通滑模控制进行分析,采用互补滑模面与广义滑模面相结合的思想,提出一种能够实现更高MPPT性能的互补滑模控制方法.采用饱和函数代替切换函数,引入自适应算法实现对不确定性干扰的有效估计,既削弱了控制过程中的抖震现象,又取得了良好的控制效果.另外,使用风力机专业仿真软件FAST以NREL CART3叶片风力机为对象进行仿真实验,仿真结果表明本文提出的互补滑模控制方法是有效的.
本文章节安排如下:第1节引言;第2节介绍风力机的气动模型及其线性化模型;第3节概述控制器设计,并分析普通滑模控制与互补滑模控制的误差界限,指出互补滑模控制能够进一步缩小误差界限的原因;第4节通过仿真结果对比现有控制方法与本文所提控制方法的效果;第5节总结全文.
2 风力机模型
风力机模型由3部分组成,即气动模型、传动链模型以及发电机模型.本文不考虑发电机模型部分,故不再赘述.
2.1 气动模型
风力机的气动转矩公式表达如下:
其中:ρ为空气密度,R为风轮半径,v为风速,ωr为风轮转速.Cp(λ,β)为风能利用系数,它的大小与叶尖速比λ和桨距角β有关.本文主要讨论的是风力机最大功率点跟踪控制阶段,该阶段桨距角β始终被固定为一个常值,本文将桨距角β设为0.
叶尖速比λ表示叶片顶端线速度与风速的比值,其计算公式如下:

给定一台风力机,Cp在某个特定的叶尖速比下取得最大值Cp.max,其对应的叶尖速比为λopt.此时,风力机的转换效率最高.换言之,对于一个特定的风速v,风力机只有运行在一个特定的转速ωr下才会有最高的风能转换效率.
根据式(3)可以得出风力机在某一特定风速下的最优转速ωopt为

这里,令风力机的参考转速值ωref等于最优转速值ωopt,即ωref=ωopt.
2.2 传动链模型
风力机的传动机构可以看做是一个双质量块模型(如图1所示),并且可按照转速划分为低速轴(风轮侧)和高速轴(电机侧).

图1 双质量模型Fig.1 Two-mass model
低速轴的动态过程可表示为

其中:Tr为风力机的机械转矩,Cr为低速轴的阻尼系数,Jr为低速轴的转动惯量.式中低速轴转矩Tls相当于一个制动转矩,其大小可以表示为

其中:Kls为传动链的等效刚度,Cls为传动链的等效阻尼,ωg表示发电机转速,θr−则表示低速轴与高速轴的相位差(扭转程度).
高速轴转矩:

其中ng表示齿轮箱的变速比.高速轴转矩Ths的方向与低速轴转矩Tls相反,高速轴的动态过程可以表示为

其中:Cg为高速轴阻尼系数,Jg为高速轴的转动惯量.Tg表示发电机电磁转矩,Ths可以看作是高速轴以及整个传动系统的制动转矩.
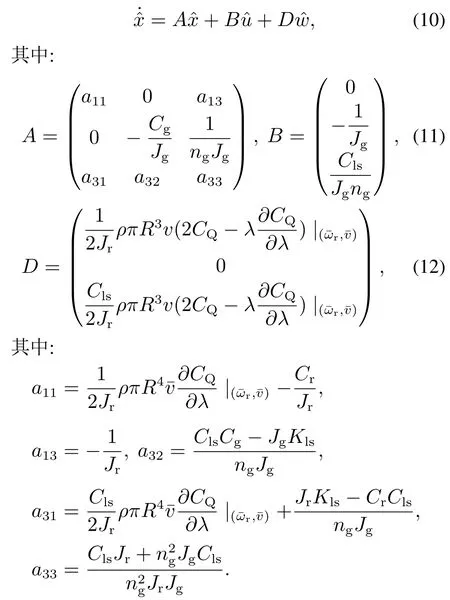
2.3 线性化模型
文献[21]中建立了风力机在平衡点附近的线性化模型,由于风速的间歇性和径流性波动,本文把平衡点附近处的风速视为外界扰动.假设风力机的平衡点为(,),该点处的变化量为∆ωr=ωr−,∆v=v−.在平衡点的线性化模型如下(∆表示较小的变化量):

3 控制器设计
本节在风力机线性化模型基础上,首先搭建了普通滑模控制的数学模型,通过分析得出转速跟踪误差的边界范围.其次,设计了风力机系统的互补滑模控制器,它能够减小转速跟踪误差边界层,获得更好跟踪效果.
3.1 普通滑模控制
普通滑模控制的框图如图2所示.

图2 普通滑模控制框图Fig.2 Block diagram of sliding mode control
为了让风力机实际转速ωr能准确的跟踪上参考转速ωref,定义转速跟踪误差为

根据式(13)定义的跟踪误差,将滑模控制面定义为

对式(14)进行求导可得

式中d1为式(12)中矩阵D中的元素.结合式(6)-(12)有

其中将d=d1(v−veq)视为干扰.对式(16)进行求解,可得到其滑模控制率uSMC为
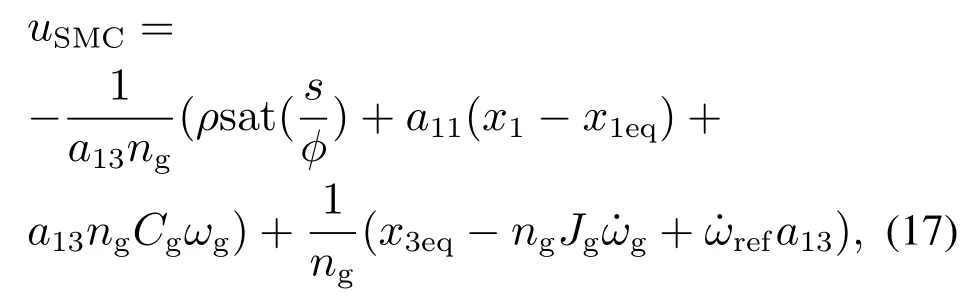
式中:uSMC表示电磁转矩Tg,ϕ为边界层厚度,ρ为所设置的常数,d为风速扰动,sat(·)为饱和函数,选择饱和函数可以有效地削弱抖震,具体表示如下:

从而满足滑动条件,即

其中µ是一正数,在规定的时间内,从任何原始状态出发的跟踪误差都能及时到达指定的边界层[22].则转速跟踪误差的边界取值范围[23]为

本小节基于风力机线性化模型的普通滑模控制器,得出其转速跟踪误差的理论边界大小.为进一步提高风力机转速跟踪精度,本文以减小误差边界值为目的,在普通滑模控制基础上,提出一种能够减小风力机转速误差边界层值,提高风力机转速跟踪能力的互补滑模控制方法.
3.2 互补滑模控制
系统的稳态误差关键取决于边界层值大小的选择,为进一步减小边界层厚度,本文提出一种新型互补滑模控制方法.该方法采用互补滑模面sc与广义滑模面s集成一体设计出新的滑模面.风力机系统的互补滑模控制原理图如图3所示,其中转速误差∆ωr为互补滑模控制器输入,控制器输出为电磁转矩Tg.
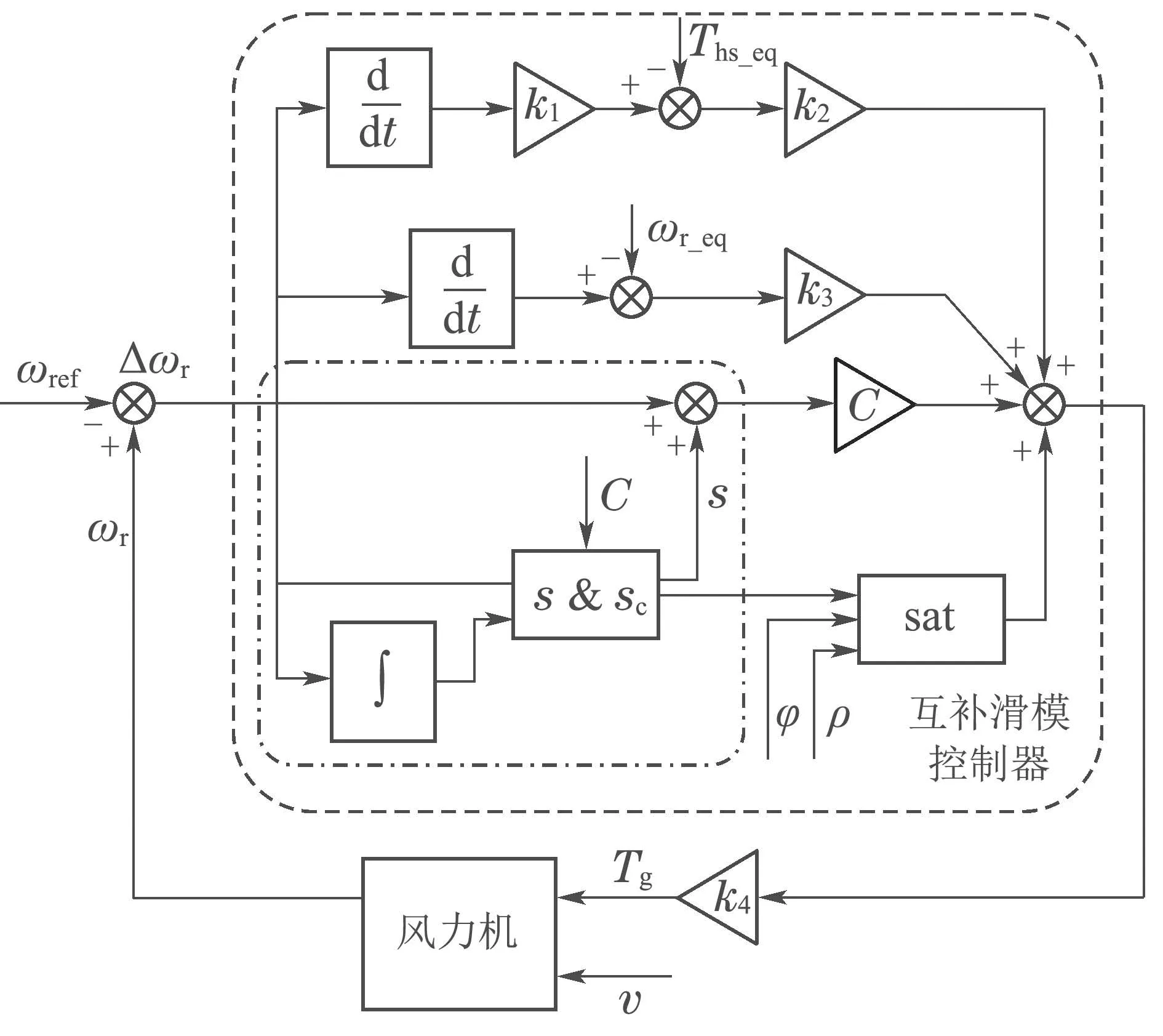
图3 互补滑模控制框图Fig.3 Block diagram of complementary sliding mode control
注1对比图2-3,互补滑模控制器相较于普通滑模控制器多引入了一个互补滑模面sc,因此能够进一步减小滑模控制中产生的跟踪误差.
广义滑模面定义为

其中C为所设置的常数.对式(21)进行求导可得

选取互补滑模面如下:

易知两滑模面存在如下关系:

结合式(10)-(12)及式(21)-(24),如果将互补滑模控制率设计成如式(25)-(27)所示的形式,那么就能保证互补滑模控制器的稳定性.

其中ρ为风速扰动d的不确定上界,且满足|d|≥ρ.
饱和函数sat(·)的表达式如下:

选取Lyapunov函数如下:

对Lyapunov函数求导得

将式(10)-(12)(22)与式(25)-(27)代入式(30)中,可得

由李雅普诺夫稳定性定理可得,所设计的互补滑模控制率满足稳定要求.故在有限的时间内,任何转速跟踪的误差都能及时到达边界层,并且能够确保跟踪误差边界的取值范围[23]为

对比以上两种控制器,结合式(20)与式(32),互补滑模控制器的转速误差界限明显小于普通滑模控制器,所以从理论上说明了它具有进一步减小跟踪误差的效果和加速转速跟踪的能力.
注2事实上,本文所提出的方法也是通过进一步增大风力机MPPT阶段的不平衡转矩来加快转速的响应,减小转速跟踪误差,进而提高风力机的风能捕获效率的.一般来说,互补滑模控制(complementary sliding mode control,CSMC)的跟踪误差会小于普通滑模控制(sliding mode control,SMC),因此在相同时间内,为了使CSMC的实际转速与参考转速之间的误差更小,CSMC的转速变化应该要大于SMC,即|∆ωr-CSMC|>|∆ωr-SMC|,所以CSMC具有更大不平衡转矩.这里,|∆ωr-CSMC|表示互补滑模控制下的转速变化量,|∆ωr-SMC|为普通滑模控制下的转速变化量.
3.3 自适应互补滑模控制器设计
互补滑模控制率中的ρ为风速扰动的不确定性上界,虽然滑模控制本身的特点是对不确定因素具有良好的鲁棒性,但是当不确定因素过大时,高频抖震可能导致系统不稳定.而自适应算法在处理参数不确定性上具有良好的效果.因此,为了减小不确定性干扰对系统的影响,本文采用自适应算法对ρ的值进行估计.
将切换控制uv重新设计为

所以自适应控制率可以设计为

其中r为设置的自适应增益,且r >0.
同时为防止ρ值过大而对系统造成不利影响,采用一种映射自适应算法[19]对其进行修正.

其中Proj为投影算子,定义为

式中:ρmax和ρmin分别是ρ的上、下界,与ρ的取值范围在[ρmax,ρmin]之间.
4 仿真验证
4.1 仿真平台
基于MATLAB/Simulink搭建仿真模型进行控制器的验证,其中风力机气动结构部分采用美国国家能源部可再生能源实验室(national renewable energy laboratory,NREL)开发的FAST软件建立,该软件目前被很多学者用于风力机控制的仿真验证[12-16].风力机模型选用由NREL搭建的CART(controls advanced research turbine)3叶片风力机,主要参数如表1所示.
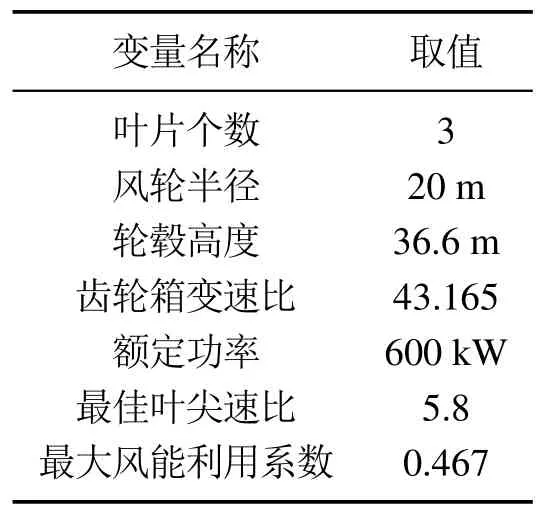
表1 CART3 风力机主要参数Table 1 Main parameters of CART3
本文的仿真风速是采用TurbSim构造,首先选取平均风速为6 m/s,湍流强度为A类的风速进行仿真,其中仿真时间为600 s,采样时间为0.04 s.为了更加贴合实际,本文采用牛顿-拉夫逊算法构造的风速观测器对风速进行估计,实际风速与估计风速如图4所示.
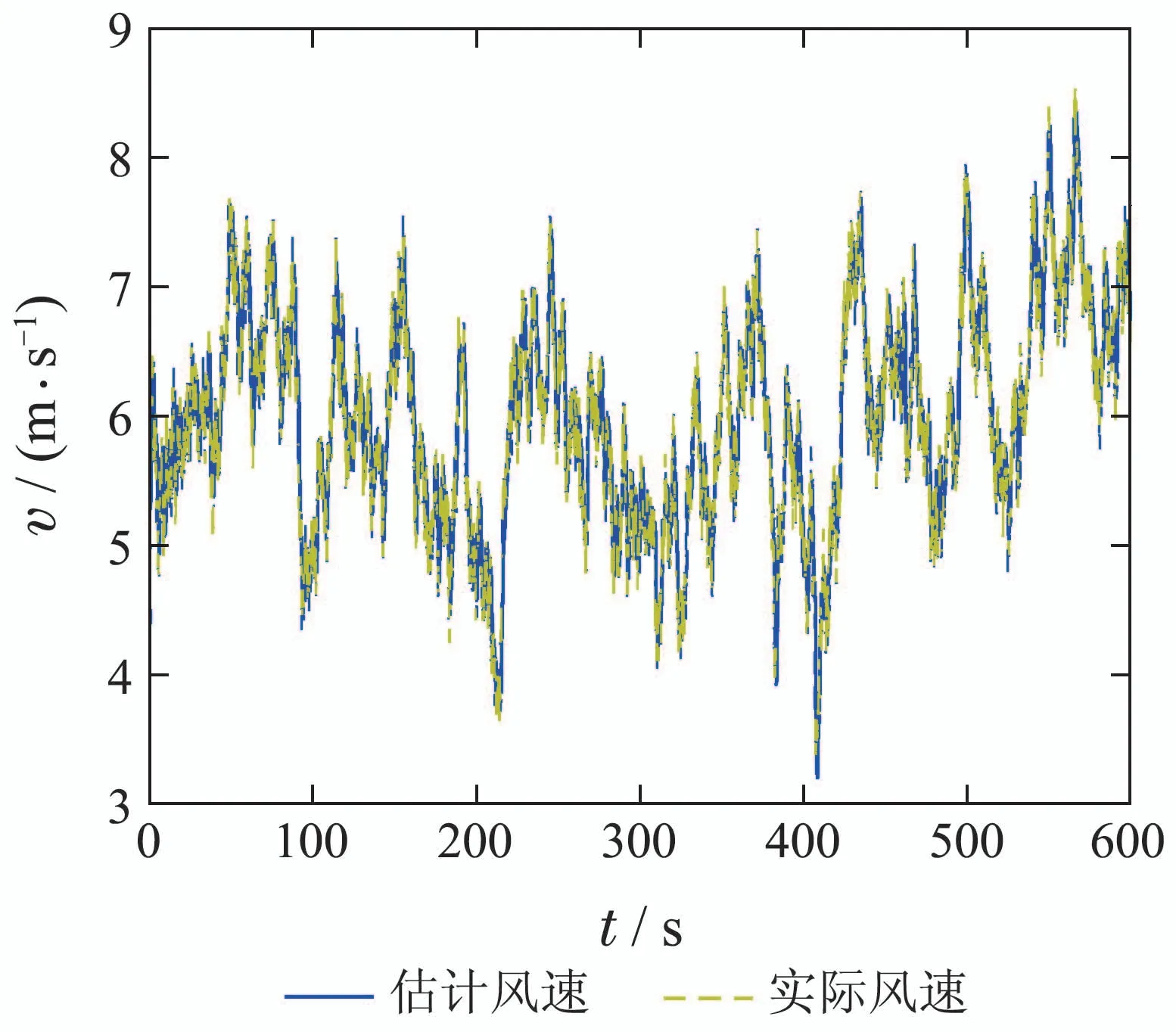
图4 模拟风速序列Fig.4 Wind speed
4.2 仿真结果分析
对于风力机系统来说,能够衡量其MPPT性能的指标主要有风能捕获效率以及转速跟踪误差.其中风能捕获效率ηp[9,14-15]的定义如下:

其中:Pe(t)为风力机发电机侧的实际输出功率,Popt(t)为风力机从风中所能捕获的最大功率(由于本文的研究对象为风力机的机械动态,仿真中并未考虑传动链损失和发电机损失).
为了验证本文所提控制方法的控制效果,选取最优转矩法(optimal torque control,OTC)、非线性动态状态反馈控制(nonlinear dynamic state feedback control,NDSFC)、普通滑模控制(SMC)与互补滑模控制(CSMC)进行比较,转速跟踪效果如图5,风能捕获效率和平均转速误差如表2.

图5 不同控制策略下的转速跟踪效果Fig.5 The rotor speed tracking trajectories

表2 风能捕获效率和平均转速误差Table 2 Wind capture efficiency and average error of rotor speed tracking
结合图5(a)-5(b)可以看出,相较于其他3种方法,本文方法在风速变化时能够及时跟踪上参考转速的变化,转速跟踪效果更好.另外,表2说明本文的方法具有更高的风能捕获效率和更小的转速跟踪误差.综上所述,本文所提方法对于提高风力机的控制效果是有效的.
注3上述平均转速误差采用如下式(38)-(39)进行计算:
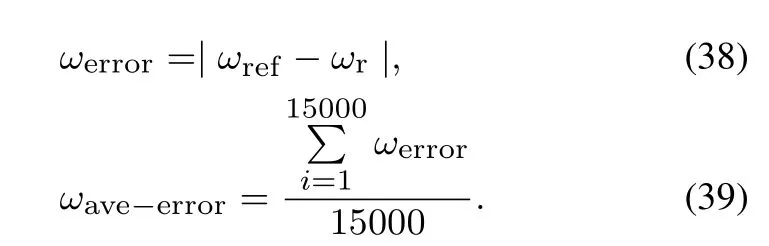
仿真中,令ϕ=0.2,首先根据式(20)与式(32),对于普通滑模控制方法而言,转速跟踪误差应该限制在0.2 rad/s以内,而互补滑模控制方法则应进一步限制在0.1 rad/s 以内.事实上,从图6可以看出:CSMC和SMC的实际误差基本上是满足式(20)和式(32)的要求,且SMC的转速误差基本上是大于CSMC的2倍,这也说明本文所提方法在风力机MPPT阶段能够达到进一步缩小转速跟踪误差的要求.

图6 CSMC与SMC的转速跟踪误差Fig.6 Speed tracking error between CSMC and SMC
为进一步验证本文所提方法的优越性,对平均风速为5.5 m/s,6.5 m/s,湍流强度为A的两种风速以及平均风速为6 m/s,湍流强度分别为A,B,C的3类风速进行仿真对比,结果如表3-6.
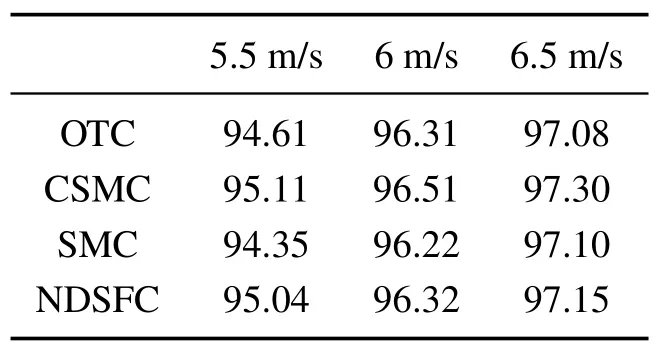
表3 不同平均风速下的风能捕获效率Table 3 Wind capture efficiency at different average wind speeds

表4 不同平均风速下的平均转速误差Table 4 Average error of rotor speed tracking at different average wind speeds

表5 不同湍流风速下的风能捕获效率Table 5 Wind energy capture efficiency at different turbulent wind speeds

表6 不同湍流风速下的转速平均误差Table 6 Average error of rotor speed tracking at different turbulent wind speeds
从表3-4可以看出,平均风速变化时,CSMC具有更好的转速跟踪效果以及更高的风能捕获效率.表5-6表明:在高湍流情况下,CSMC依然能够取得不错的效果;在低湍流情况下,CSMC相较于SMC和NDSFC能获得更高的风能捕获效率.但是,OTC在湍流强度较低的情况下会有更好的效果.但是这并不影响本文所提方法的有效性.因为随着风力机的不断研究与发展,低风速高湍流的风场利用将是一个重要的研究方向.综合上述仿真结果,进一步说明了CSMC控制策略在风力机MPPT阶段的有效性.
5 结论
本文为了进一步减小风力机的转速跟踪误差,提高风能捕获效率,提出了一种互补滑模控制方法.首先,建立了含有风速干扰的风力机线性化模型,采用广义滑模面与互补滑模面相结合的方法设计了互补滑模控制器.其次,针对互补滑模控制中存在的不确定性干扰上界问题,结合自适应算法对干扰进行了估计.最后,基于FAST软件对600 kW风力机,选取不同平均风速、不同湍流强度的风速进行了仿真实验,仿真结果表明:互补滑模控制策略相较于其他控制策略,能够减小转速跟踪误差,提高风能捕获效率.
但是,在互补滑模控制策略下的转速跟踪误差受到边界层值ϕ的影响,缩小边界层值能减小跟踪误差,同时也会加剧系统抖震,所以如何有效的选取ϕ值从而取得更优的控制效果有待进一步研究.
猜你喜欢
农业工程学报(2022年7期)2022-07-09
大电机技术(2022年2期)2022-06-05
小天使·五年级语数英综合(2021年9期)2021-09-18
能源工程(2021年1期)2021-04-13
船舶与海洋工程(2019年6期)2019-12-25
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2017年3期)2017-11-23
军事文摘·科学少年(2017年2期)2017-04-26
家教世界·创新阅读(2017年1期)2017-02-07
北京航空航天大学学报(2016年7期)2016-11-16