“嫦娥4号”中继星使命轨道段定轨计算与分析
2019-09-02 00:34:18段建锋李翠兰王兆魁
深空探测学报 2019年3期
段建锋,李 勰,李翠兰,王兆魁
(1.北京航天飞行控制中心,北京100094;2.航天飞行动力学技术重点实验室,北京100094;3.清华大学航天航空学院,北京100084)
引 言
月球是距离地球最近的天体,具有可供人类开发和利用的多种资源。月球探测是人类了解地球、太阳系和宇宙进而考察和勘探太阳系的第一步。通过月球探测能帮助人类研究太阳系及宇宙的起源、演变和现状,进一步认识地球环境的形成和演变,认识空间现象和地球自然系统之间的关系,从现实和长远来看,对月球的探测和开发具有十分重要的科学和经济意义[1]。
20 世纪90 年代,我国已经开始进行月球探测工程的先期研究。我国的探月工程,在2020 年前分“绕、落、回”三步实施,所谓“三步走”战略[2]。我国第一个月球探测器“嫦娥1 号”卫星于2007 年10月成功环月探测,圆满实现了探月工程一期“绕”的目标[3];2010 年 10 月,“嫦娥 2 号”卫星作为探月工程二期任务的先导星,成功完成了环月的先导探测,并完美地完成了多阶段拓展任务,通过一次发射任务完成了月球、日地拉格朗日L2 点、图塔蒂斯(Toutatis)小行星的多目标探测[4-6];2013 年12 月14日,“嫦娥3 号”探测器成功着陆月球虹湾地区,12月15日,“玉兔号”月球车与着陆器顺利分离,其行走的车辙印在了月球表面。“嫦娥3 号”任务圆满成功,首次实现了我国航天器在地外天体软着陆和巡视勘察,标志着我国探月工程第二步战略目标的全面实现。2014 年11 月1 日,“嫦娥5 号”高速再入试验任务的返回器在内蒙古四子王旗地区顺利着陆,标志着我国月球探测领域技术的又一次重大进步,拉开了我国探月工程第三期的序幕[7],“嫦娥5号”任务推迟发射后,“嫦娥4号”任务于2018年正常执行。
“嫦娥4 号”任务分为中继星任务和探测器任务两个阶段,其中中继星被命名为“鹊桥”,于2018年5月21日在西昌卫星发射中心通过“长征4号”丙型(CZ-4C)火箭发射升空,在地面测控支持下,经中途修正,在近月点实施近月制动和月球借力,进入月球至地月L2点的转移轨道,经地月L2点捕获后,进入环绕地月L2 点的使命轨道。使命轨道为Z 向振幅约1.3 万km、轨道平均周期约为14 d 的南族Halo 轨道[8]。使命轨道运行期间,在测控和地面应用系统支持下,中继星将实现月球背面的着陆器与地面站之间前向/返向的实时和延时测控数传中继。中继星飞行轨道如图1所示。
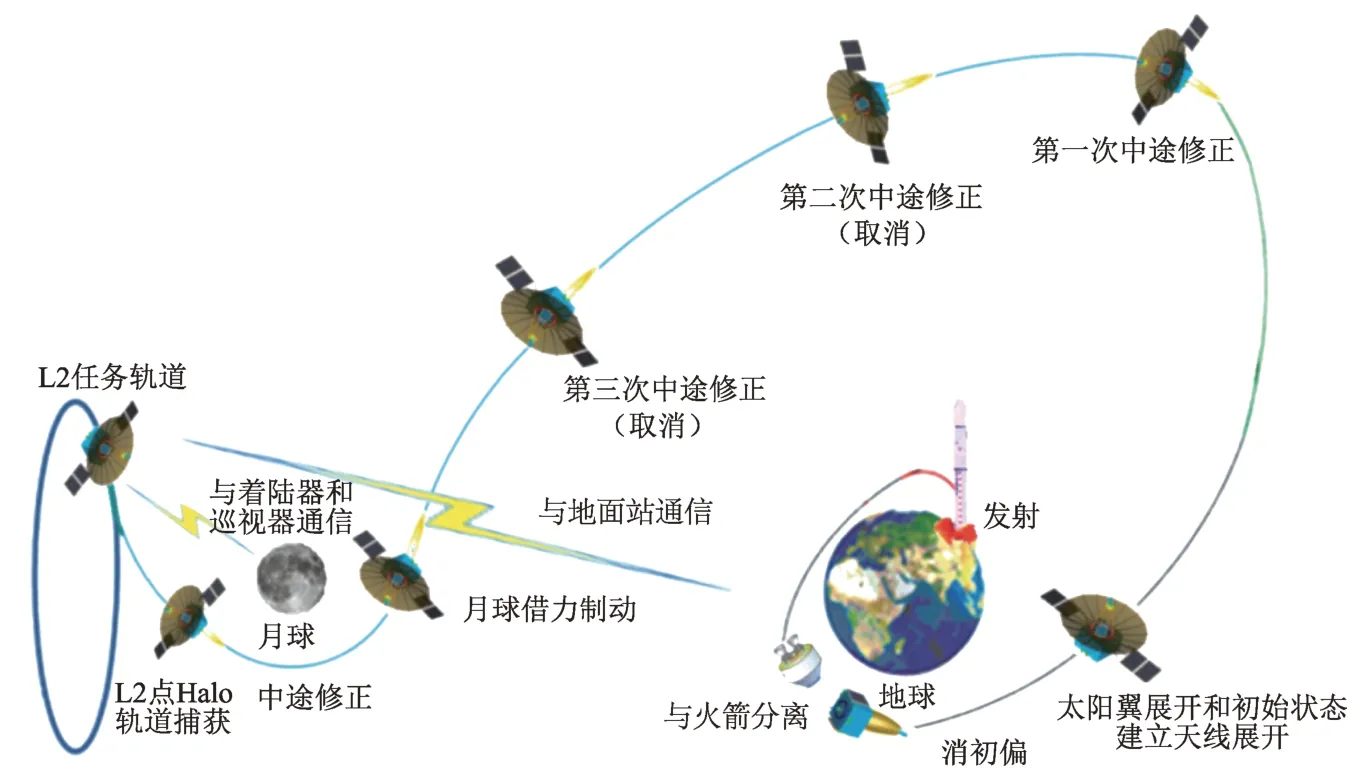
图1 “嫦娥4号”中继星飞行过程示意图Fig. 1 Flight profile of the Chang’E-4 relay satellite
在我国深空探测任务中,仅于2015 年通过“嫦娥5 号”再入返回试验的留轨服务舱进行过为期1个半月的绕地月L2 点飞行,但在地月L2 点布设一颗长期运行的中继星的任务从未有过。在其长期在轨运行期间,因其不稳定的轨道特性,卫星需要进行经常性的轨道维持使其轨道得以保持[9],在中继星执行任务期间,中继星用于通信的天线所在+Z轴需指向地面或者月面,导致中继星整体受光压力的不平衡而使得卫星角动量累积加快,从而出现喷气卸载的情况,这些都对地面测控团队提出了更高的要求。
本文基于北京航天飞行控制中心的轨道计算与分析软件平台(BACC Orbit Determination and Analysis System,BODAS)[10],针对使命轨道段因轨道维持、动量轮卸载产生的喷气对轨道的影响,通过求解经验力的方式,采用国内外多数机构对轨道进行精度评价使用的重叠弧段法对定轨精度进行评价分析。
1 使命轨道段动力学模型
1765 年欧拉(Euler)发现了在一个旋转二体引力场中存在3 个共线的天平动点,1772 年拉格朗日(Lagrange)指出在一个旋转二体重力场中存在另外两个天平动点,后人将这5 个点统称为拉格朗日点,也称平动点[11-12],如图2 所示。平动点是第三体在受两个大天体的万有引力作用时,在空间中的引力平衡点。运行于平动点的飞行器可以保持该双星系统的公转角速度而几乎不用消耗推进剂。由于平动点特殊的动力学特性和在三体问题中相对固定的位置,使其在停泊中转、中继通信、星际转移等未来深空探测任务中具备较好的工程应用价值,Farquhar最早提出利用地-月L2点实现月背通信的概念,此后许多学者开展了相关的研究。在月球背面实现着陆与巡视的“嫦娥4号”任务将通过中继星首次实践这一理论。考虑月球遮挡等限制因素,该中继星采用绕地月L2 点Halo轨道作为其使命轨道,使命轨道段飞行示意图如图3所示[13]。
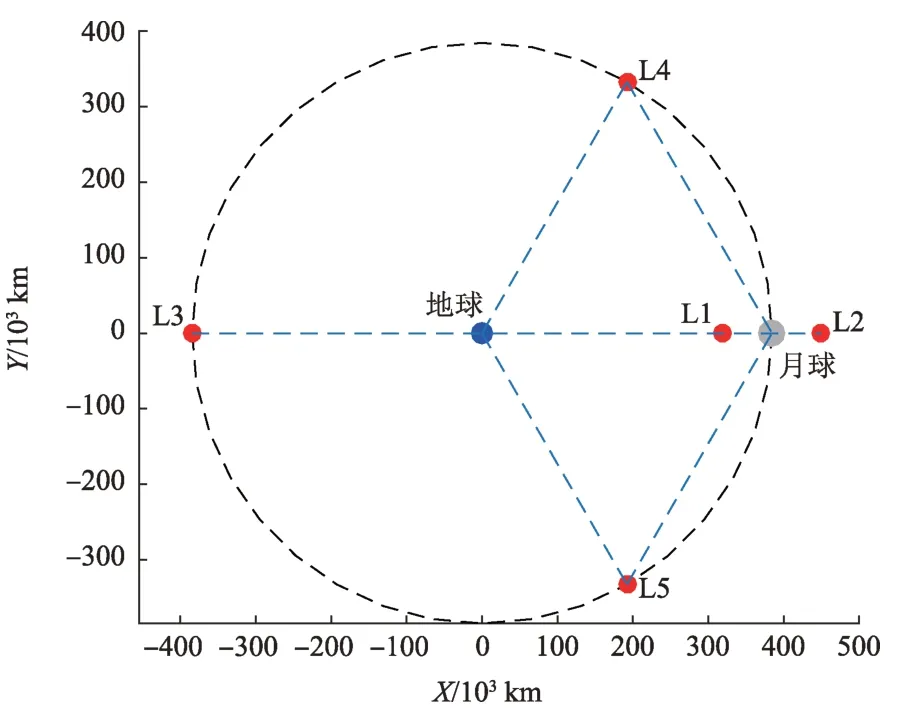
图2 地月拉格朗日点示意图Fig. 2 Earth-Moon three-body system
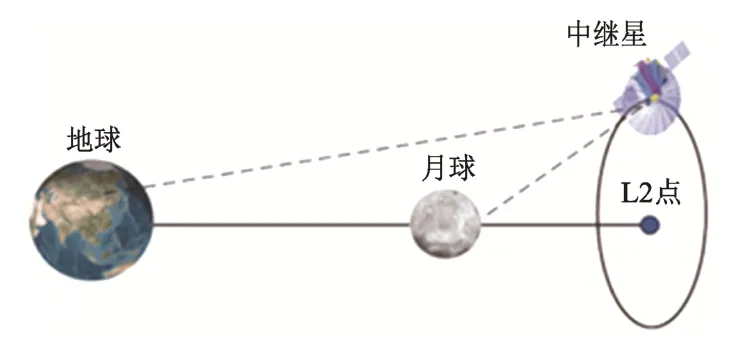
图3 中继卫星绕L2点使命轨道示意图Fig. 3 The line-of-sight visibility between the Earth and relay satellite around the Earth-Moon L2 point
因中继星的质量远小于地球、月球的质量,其在使命轨道运行时可以看作限制性的(3+1)体问题[14],即中继星受太阳、地球、月球3个主要力源的影响,同时考虑其它不可忽略的摄动力影响,构成其动力学方程,在地球质心坐标系下可描述为

其中:r为卫星的位置矢量;ae为地球产生的质点引力加速度;as为太阳产生的质点引力加速度;am为月球产生的质点引力加速度;alns为由月球引力位的非球形部分产生的非球形引力加速度;aens为由地球引力位的非球形部分产生的非球形引力加速度;asrp为由太阳辐射压产生的加速度;还有其它的加速度如由木星、土星等大行星引起的加速度、由天体潮汐引起的加速度等,这里统称为aoth;awol为模拟卫星因喷气产生的作用力,也称为经验力[15]。
由式(1)可知,中继星在使命轨道属于太阳-地球-月球-卫星多体问题,如图3所示,其在使命轨道飞行时无真实的积分中心,绕飞轨道为弱中心引力轨道,与普通的地球卫星或月球卫星特性并不完全一样,为方便进行轨道精度评估,选取地心作为其积分中心,在地月系框架内进行分析。
2 使命轨道段定轨分析策略
2.1 测控条件
目前我国深空站共有3个,分别是佳木斯站、喀什站和南美站;在喀什、青岛和纳米比亚分别有3副18 m 天线;此外,还有由北京、上海、昆明和乌鲁木齐的4 个VLBI 观测站5 部天线组成的VLBI 分系统,具体分布见图4所示。特别是南美深空站建成后实现了深空探测的24 h 无间段跟踪,目前深空站测距、测速、VLBI 时延和时延率典型测量精度分别约为1 m,1 mm/s,1 ns和1 ps/s[16]。
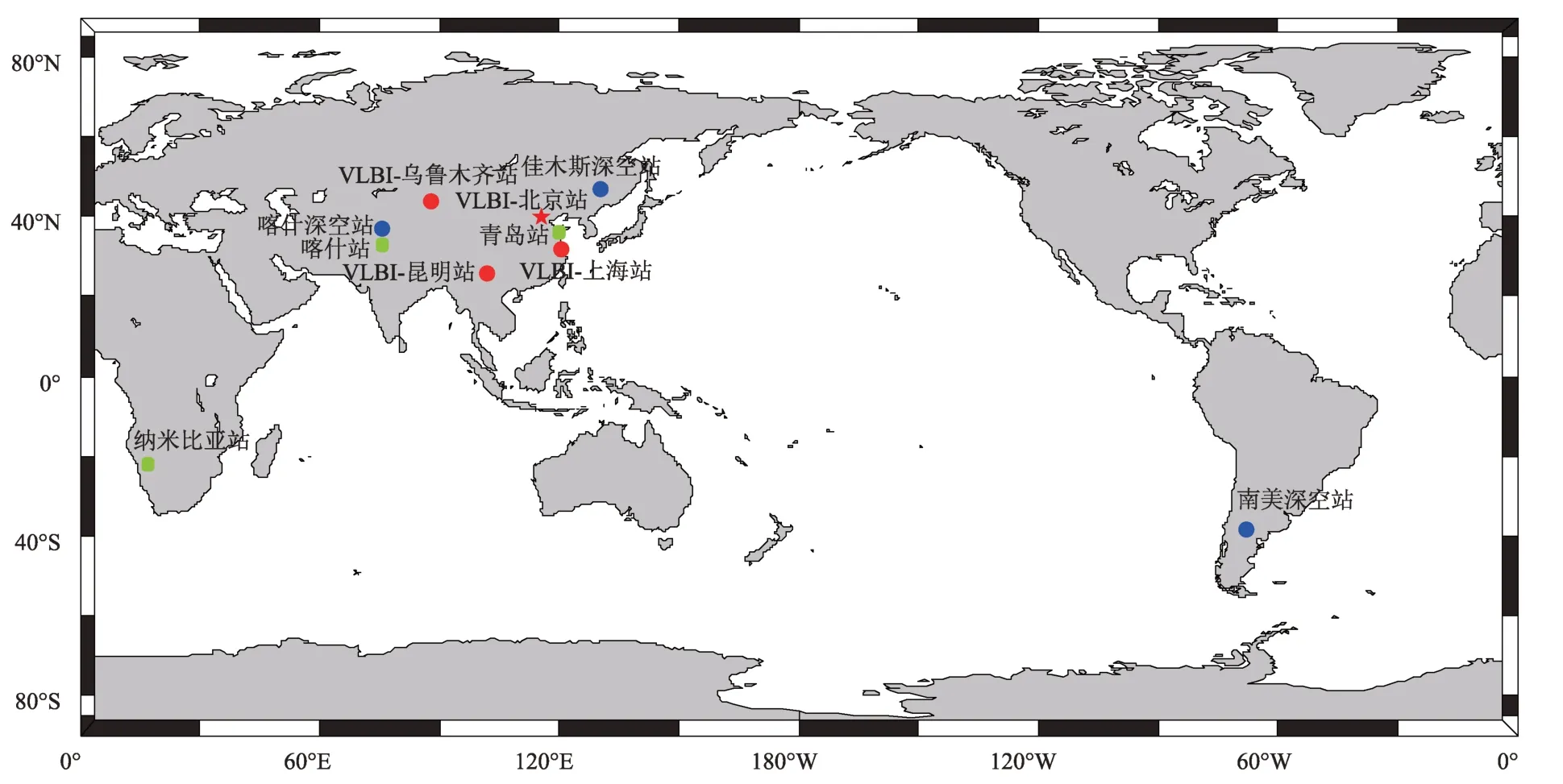
图4 我国深空站分布图Fig. 4 Distribution of deep space station in China
此次中继星任务,我国的深空测量系统全部参与,保障中继星顺利抵达使命轨道,在使命轨道段,测量弧段逐步减少,平均每日深空站观测弧长为8 h,在轨道维持或卸载前后,上海VLBI测轨分系统进入并进行跟踪测量,佳木斯深空站与喀什深空站连线进行干涉测量与三向测量跟踪,确保喷气前后有充足的测轨数据来保证轨道精度。
在深空站测量精度不变的前提下,明显减少的观测弧长对地面测控系统的轨道确定工作带来困难,有必要对此条件下的定轨精度进行评估分析。
2.2 定轨基本策略
在本文的定轨精度分析中,采用的动力学模型如表1所示[17-18],重点分析了中继星在地月L2点使命轨道飞行的过程,主要测量数据源为我国深空站的双程测距数据(USB)、三向测量数据和甚长基线干涉测量数据(VLBI)。
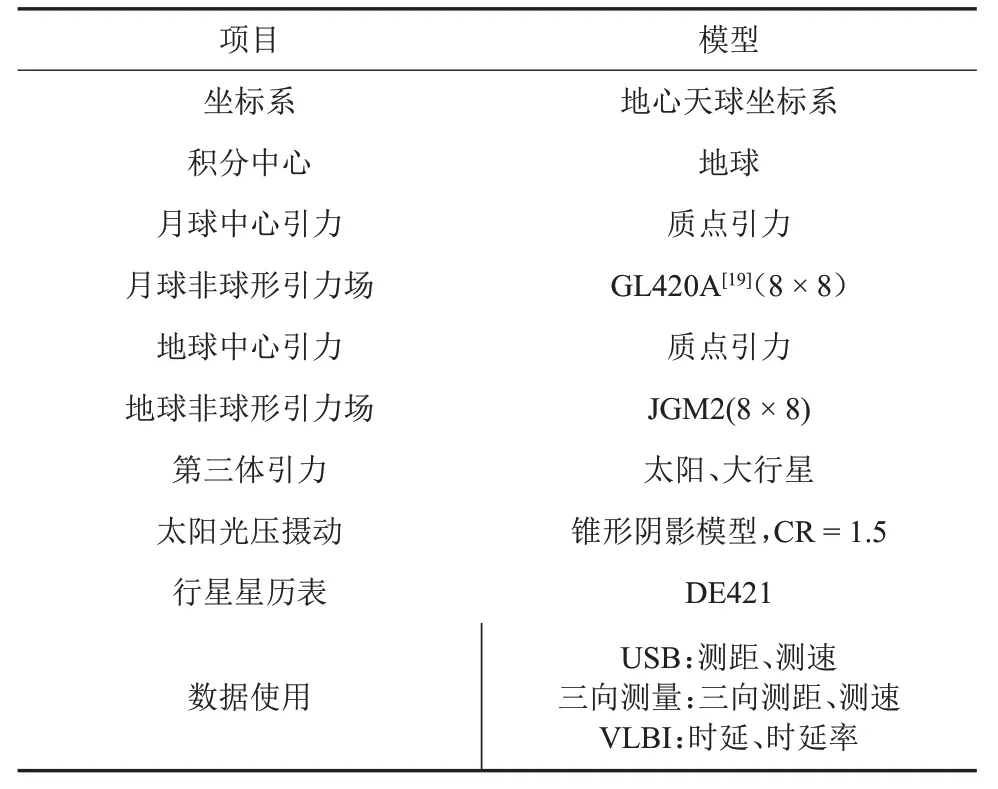
表1 定轨策略Table 1 Strategy for the orbit determination
3 定轨精度分析评估
“嫦娥4 号”任务中继星于2018 年5 月29 日正式进入Halo 轨道运行,正常运行1 圈后中继星+Z轴转对月定向或对地定向,对中继星各项载荷进行功能测试,运行4.5 圈后重新转回对日定向。图5 所示为中继星在使命轨道段运行的两种状态:中继星本体系+Z轴对日和本体系+Z轴非对日。由于中继星对称的立方体星体加上伞状通信天线的结构特点,在中继星+Z轴非对日的情况下,太阳光压对卫星作用力是不平衡的,导致卫星的角动量累积速度较快,需要频繁通过喷气进行角动量的卸载,进而影响轨道维持的时间点;中继星+Z轴对日的情况下,太阳光压对卫星的作用力是平衡的,角动量累积速度明显减小,角动量卸载的影响减少甚至消失,轨道维持频率降低,本文对中继星在使命轨道运行时以上两种条件下的轨道进行精度评估与分析。
3.1 中继星+Z轴非对日状态
在 2018 年 6 月 15 日,中继星+Z轴指向由对日调整为对月,本文选取6月15日后约2圈的数据进行分析,在选取的弧段内,由星上遥测下传的四元素可计算出中继星+Z轴与太阳矢量的夹角(α)变化如图6所示,可以看出α角的变化范围在0~180°。随着α角的变化,中继星角动量累积加快,需要频繁地进行喷气卸载以保证动量轮的正常使用,在卸载喷气与轨道维持的共同作用下,最短1 天、最长12 天一次喷气,定轨弧段被切割得较为分散,根据段建锋等人[20]在“嫦娥1号”任务数据处理中积累的经验,需要对喷气进行经验力求解,并使用重叠弧段法进行定轨精度评估。
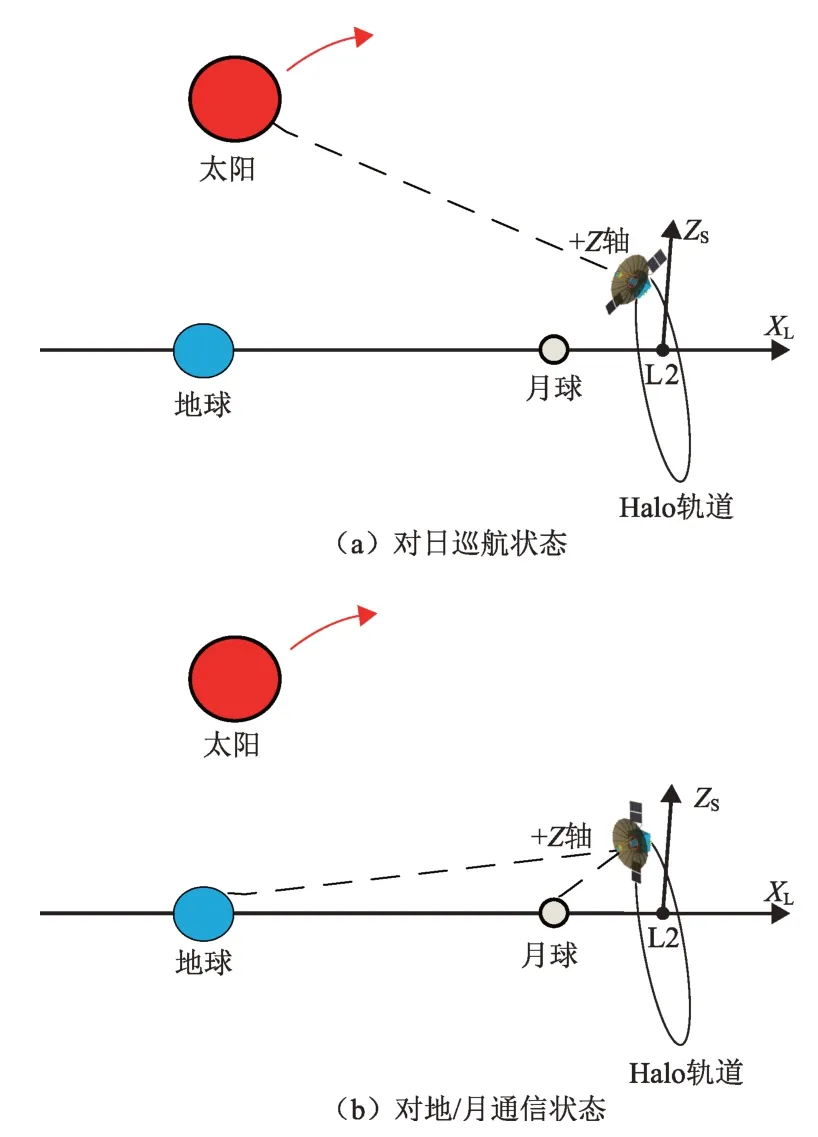
图5 中继星在使命轨道的两种运行状态Fig. 5 Two flight states of relay satellites in misson orbits
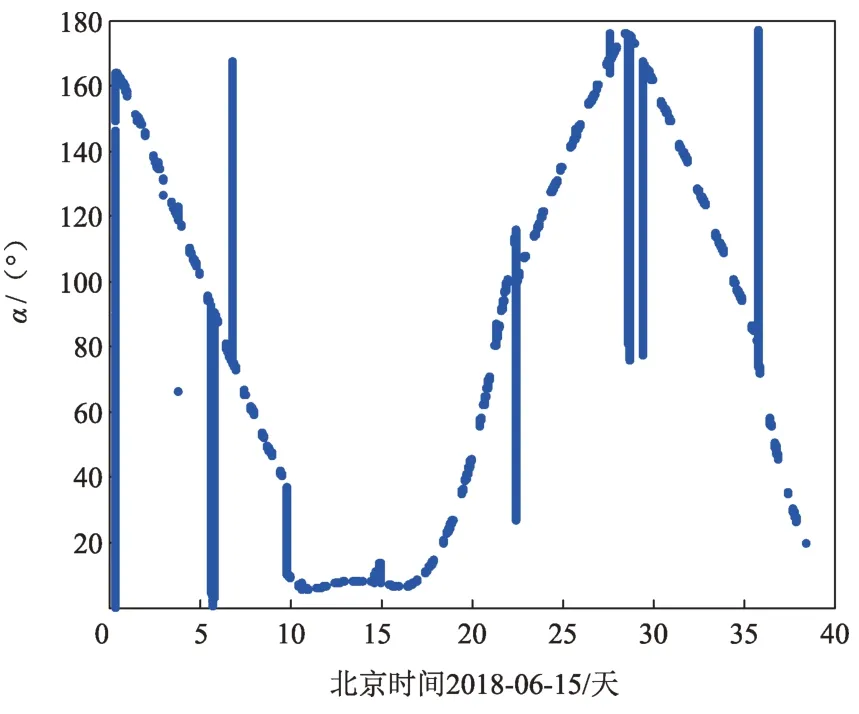
图6 中继星+Z轴与太阳矢量夹角α变化示意图Fig. 6 Variation of angle between+z axis of relay satellite and solar vector
结合中继星喷气情况,重叠弧段的分割选取策略如表2所示,每个切割弧段至少有5天以上的测轨弧段,确保有充足的测轨数据用于轨道确定。
定轨使用的策略如表1所示,在计算过程中,每个定轨弧段根据跟踪数据的长短,需要进行1~2 次的经验力求解以消除探测器因喷气对轨道的影响。
在表3中给出了7段重叠弧段的位置速度精度,统计的是重叠弧段内位置速度误差的最大值(MAX),从表中可以看出,中继星+Z轴非对日状态下重叠弧段精度位置平均约1.6 km,速度平均约8 mm/s。
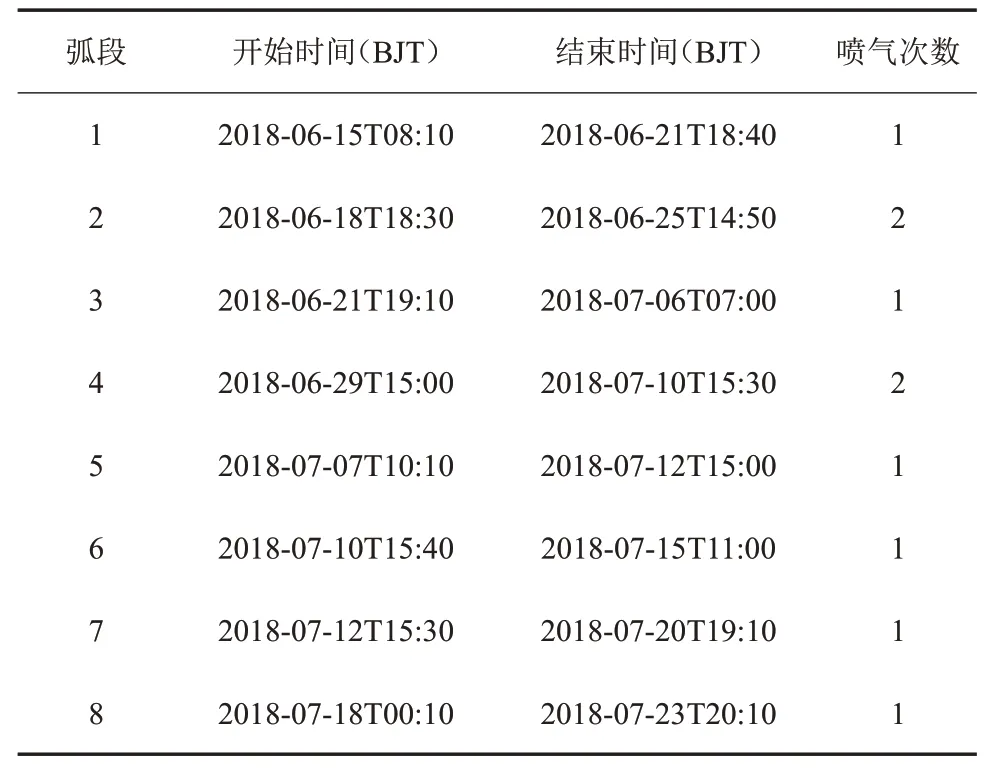
表2 中继星+Z轴非对日状态下重叠弧段选取策略Table 2 The strategy of overlapped arcs for+Z axis is not pointing to Sun
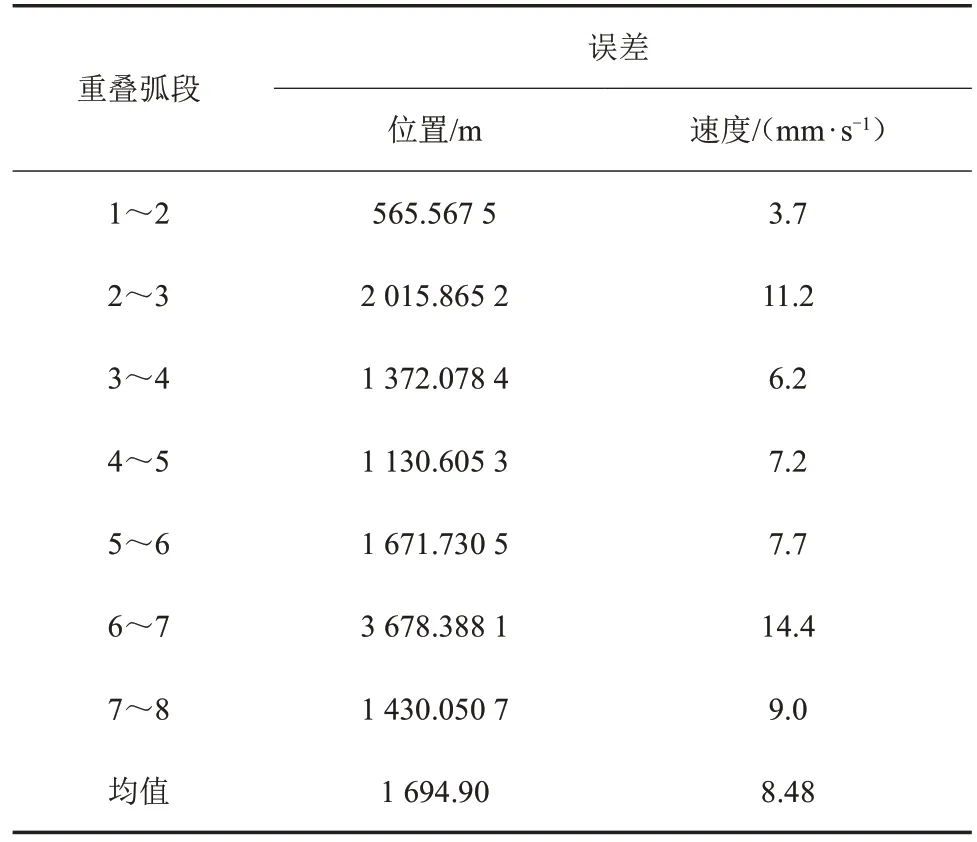
表3 中继星+Z轴非对日状态下重叠弧段精度统计Table 3 The accuracy statistics of overlapped arcs for+Z axis is not pointing to Sun
3.2 中继星+Z轴对日巡航状态
在 2018 年 8 月 20 日,中继星+Z轴指向由对月调整为对日巡航状态,本文选取8月20日后约2圈的数据进行分析,重叠弧段的分割选取策略如表4 所示。由表中可以看出,因中继星受太阳光压力较为平衡,角动量的累积速度明显减弱甚至消失,喷气时间明显拉长,喷气间隔时间在5天以上。
对于中继星+Z轴对日巡航状态下的定轨计算,仍然采用表1 的策略,在计算过程中,4 个弧段均需要解算经验力以消除中继星喷气对轨道的影响。从表5中可以看到,中继星+Z轴对日巡航状态下重叠弧段精度位置平均约0.6 km,速度平均约3 mm/s,明显优于中继星+Z轴非对日状态下的精度。
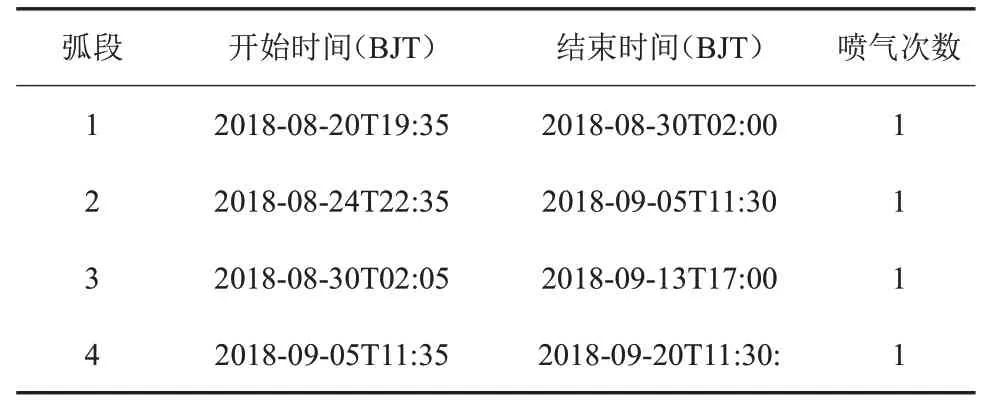
表4 中继星+Z轴对日巡航状态下重叠弧段选取策略Table 4 The strategy of overlapped arcs for+Z axis is pointing to Sun
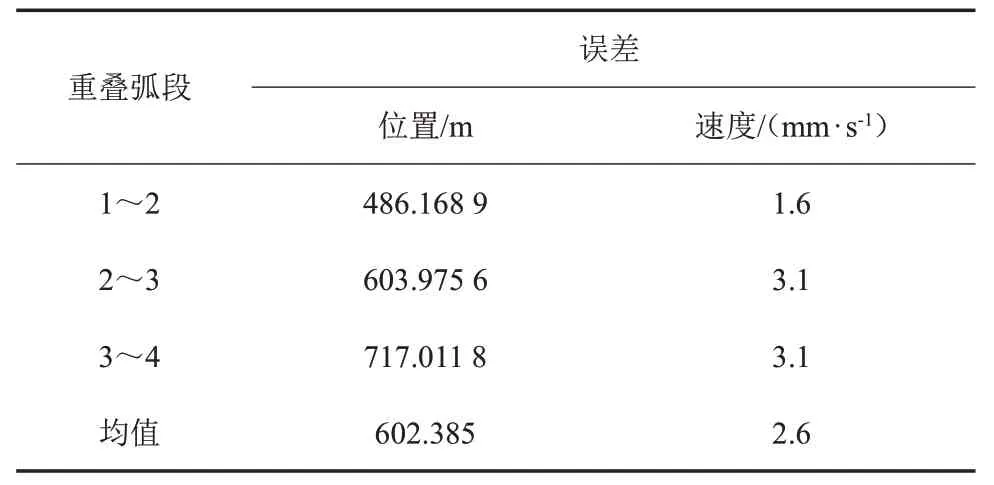
表5 中继星+Z轴对日巡航状态下重叠弧段精度统计Table 5 The accuracy statistics of overlapped arcs for +Z axis is ointing to Sun
4 结 论
“嫦娥4 号”任务是一次全新的任务模式,任务分为两个阶段,中继星任务阶段和探测器任务阶段,中继星任务的成败将直接决定“嫦娥4号”任务的成败,在整个任务体系中起到至关重要的作用,而中继星任务对于地面测控中心来说也是一种全新的考验,具有任务轨道新、在轨时间长、轨道精度要求高等特点,因此对于中继星任务情况的总体把握、轨道特性的透彻分析、定轨精度的准确评估显得尤为关键。
中继星在使命轨道段运行时,太阳光压摄动项是影响其定轨预报误差的主要因素,本文将中继星在使命轨道段分为两种运行状态,并在当前测控条件下分别对其进行轨道精度分析评估,得出在中继星+Z轴非对日运行状态下,重叠弧段位置误差1.6 km,速度误差8 mm/s;在中继星+Z轴对日运行状态下,重叠弧段位置误差0.6 km,速度误差3 mm/s。由于目前仅仅依据中继星在使命轨道上前7圈的定轨数据进行了分析和评估,样本有限,后续还要结合中继星在轨的长期运行数据进行分析和评估,得出更可信的结果,以便为中继星的稳定在轨运行提供重要的参考。
猜你喜欢
上海航天(2024年1期)2024-03-08 02:52:28
电子设计工程(2022年24期)2022-12-23 12:03:28
光学精密工程(2021年8期)2021-10-04 11:46:28
电信科学(2017年6期)2017-07-01 15:44:35
小布老虎(2016年10期)2016-12-01 05:46:41
航天器工程(2015年3期)2015-10-28 03:35:28
四川建筑(2015年4期)2015-06-24 14:08:40
作文大王·低年级(2015年9期)2015-05-30 10:48:04
电子设计工程(2015年16期)2015-02-27 12:07:46
科技传播(2013年22期)2013-10-17 11:16:36