
中继测控链路动态分析与计算方法研究
2015-10-28 03:35康国栋宁金枝李琪蔡亚星李红宝
航天器工程 2015年3期
康国栋宁金枝李琪蔡亚星李红宝
(1航天东方红卫星有限公司,北京 100094)
(2中国空间技术研究院通信卫星事业部,北京 100094)
中继测控链路动态分析与计算方法研究
康国栋1宁金枝1李琪1蔡亚星2李红宝1
(1航天东方红卫星有限公司,北京 100094)
(2中国空间技术研究院通信卫星事业部,北京 100094)
中继测控链路计算是进行中继测控链路性能分析的重要手段。就任意可视弧段而言,中继终端和中继卫星之间的相对位置都是不断变化的,这就引起部分链路参数随着时间和位置动态变化。文章提出了一种中继链路动态分析与计算的方法,建立了中继链路动态通信方程,最后以中继终端和天链一号01星某仿真可视弧段为例,进行了中继链路的动态分析与计算。结果表明,文章的链路计算与分析方法实际可行,对于中继终端实际工程应用和在轨试验具有参考价值。
中继测控;中继链路动态通信方程;中继链路分析
1 引言
随着中低轨道卫星数据的快速增长,中继卫星系统对中低轨飞行器进行长弧段高覆盖率的实时跟踪与数据中继的要求已经越来越迫切。自20世纪80年代以来,美国航空航天局(NASA)、俄罗斯联邦航天局、欧洲航天局(ESA)和日本宇宙航空研究开发机构(JAXA)等空间组织都在积极研制自己的中继卫星系统。随着我国航天事业的发展,我国的天基测控能力也取得了长足进步。2008年4月我国发射了中继卫星天链一号01星,此后相继发射了天链一号02星和03星,实现全球覆盖,大大提高了我国对中低轨卫星的天基测控能力[1-4]。
与此同时,中继卫星的应用研究也得到了快速发展,为了在地面站无法覆盖的境外区域进行应急通信、实时回传等任务,在中继卫星和低轨卫星中继终端之间建立中继测控链路至关重要。目前的一些中继测控方面的研究主要是关于中继卫星对中继终端天线的可见时间及覆盖性情况的分析[5-6],没有进行具体的中继链路计算的讨论。链路计算是进行链路分析和掌握系统整体性能的一个重要工具。它一般用来预测通信链路在给定设计指标下的平均性能。链路计算给出的链路余量是关于系统整体性、宏观方面的确定性指标。在中继地面测控站、中继卫星和中继测控终端之间建立的前向/返向链路中,中继测控链路的余量是衡量能否建立满足一定信号质量要求的中继测控链路的重要参考因素。
在进行中继链路的计算与分析时,因为中继卫星和地面站之间的位置相对固定,它们之间的各种链路参数一般相对保持不变,所以这部分链路的性能可以静态地进行分析计算。而中继终端和中继卫星之间的相对位置就任意一个可视弧段而言都是不断变化的,这就引起部分链路参数,如在链路方向上的中继终端天线增益值、中继终端的等效全向辐射功率、中继终端接收天线增益与噪声温度的比值(G/T)等,随着时间和位置动态变化。本文将中继链路分为静态链路(中继卫星和地面站之间)和动态链路(中继卫星和中继终端之间)两部分分别建立链路通信方程,提出了一种动态分析与计算中继链路的方法,计算出了整个链路总的前向返向动态载噪比,并以中继终端和天链一号01星某仿真可视弧段为例,进一步分析了中继全程链路的前向返向链路余量的动态变化情况。
2 中继测控链路分析
2.1 中继测控链路的组成
中继天基测控任务是通过中继测控链路来完成的。中继测控链路是由中继卫星、中继测控终端(本文以下简称中继终端)和地面测控站构成的通信链路。通过中继测控链路,中继终端可以接收中继卫星转发的来自地面站的遥控指令或数据,也可以由中继卫星透明转发用户卫星的遥测数据至地面站。图1给出了中继测控链路的两条通信链路的示意图:一条为前向链路,由地面站经中继卫星到达中继终端;另一条为返向链路,由中继终端经中继卫星到达地面站。
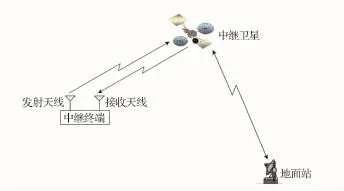
图1 中继测控链路示意图Eig.1 Illustration of DRS TT&C link
2.2 中继测控链路的建立、保持与释放
每次中继业务都有从链路建立到链路保持再到最后释放链路的一个过程。中继测控链路建立时,由地面站天线跟踪指向中继卫星,指令控制调节中继卫星对地天线指向地面测控站,保证建立起地面站和中继卫星之间的馈电链路。中继卫星天线受指令控制指向用户卫星,以实现中继卫星天线对用户卫星的跟踪指向。图2给出了中继链路建立、保持与释放的过程。
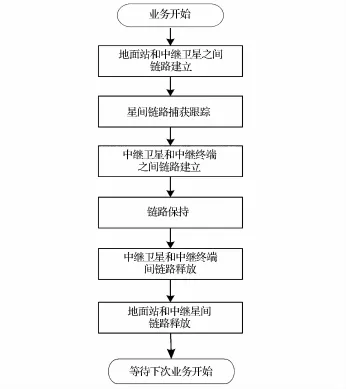
图2 中继测控链路建立、保持与释放过程Eig.2 Procedure of DRS TT&C link construction,maintenance and release
2.3 中继测控链路参数动态变化分析
在执行中继业务时,中继终端的在轨运动会引起中继卫星和中继终端之间链路的俯仰角和方位角相应变化,从而导致中继链路参数动态变化。
2.3.1 中继卫星俯仰角、方位角与中继终端天线波束角之间的关系分析
1)坐标系定义
地心惯性坐标系是以地球球心为原点,以赤道面为基准面的坐标系;卫星本体坐标系是以卫星质心为坐标原点,以轨道面内运动方向为X轴,以指向地心方向为Z轴的坐标系;卫星天线坐标系原点与卫星本体坐标系原点重合,X轴与卫星本体坐标系X轴重合,Z轴为卫星天线视轴指向方向[7-8]。文章中的中继终端天线固定安装在低轨卫星的对天面上,即天线坐标系的Z轴与卫星本体坐标系的-Z轴重合。
2)中继卫星俯仰角、方位角与中继终端天线波束角之间的关系
中继卫星在中继终端天线坐标系下的俯仰角、方位角和中继终端天线波束角之间的关系如图3所示。
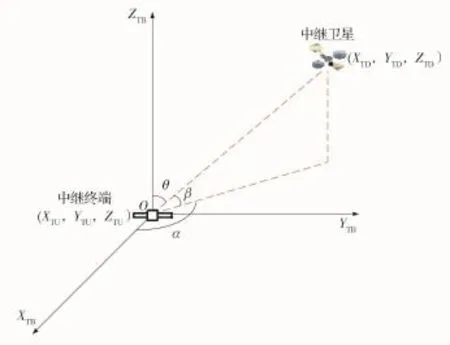
图3 中继卫星俯仰角、方位角和中继终端天线波束角之间的关系(中继终端天线坐标系)Eig.3 Illustration of the relation among DRS antenna elevation,azimuth and DRT antenna beam angle(DRT antenna body coordinate system.)
方位角α可表示为

假设中继终端天线在方位角α的切面上的波束角为θ,由图3中关系可知:
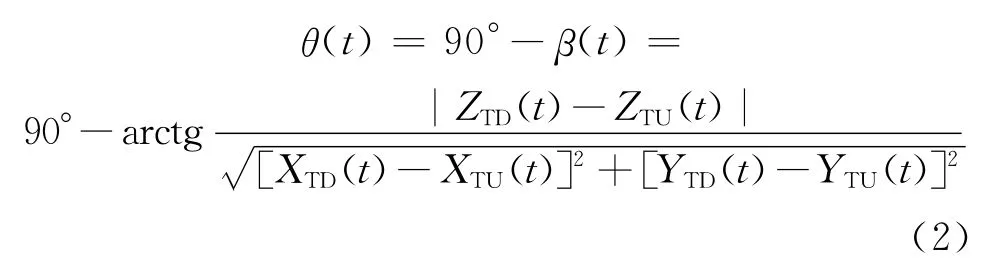
式中:β(t)为中继卫星在中继终端天线坐标系中的俯仰角;(XTD(t),YTD(t),ZTD(t))和(XTU(t),YTU(t),ZTU(t))分别为t时刻中继卫星天线质心和中继终端天线质心在地心惯性坐标系中的坐标,可由该时刻卫星的经纬度和卫星高度计算得到,本文在此不进行详细叙述。由于中继卫星和中继终端距离遥远,常常相距数万千米,故本文近似认为天线质心和卫星质心重合。
2.3.2 中继链路参数动态变化分析
中继终端天线一般是固定安装在卫星上的,不具备转动机构,故中继卫星和中继终端之间的链路方向一般并不是中继终端天线的最大增益方向,并且随着中继终端的在轨运动,中继卫星相对于中继终端的俯仰角和方位角也在不断发生着变化,从而影响到中继终端天线的波束角,进一步影响到用于链路计算的中继终端天线增益G的大小和中继终端等效全向辐射功率(EIRP)的大小。
本文讨论的中继终端天线固定安装在卫星的-Z面,其用于中继链路计算的天线增益值是天线波束角和方位角的函数,换句话说,也是中继卫星在中继终端天线坐标系中的俯仰角和方位角的函数,本文表示为G(α,β)。
EIRP表示在所讨论方向上等效于一个各向同性辐射的设备所能发出的功率。本文将中继终端的EIRP考虑为中继卫星在中继终端天线坐标系中的方位角和俯仰角的函数。

式中:EB为中继终端发出的等效全向辐射功率;PUT为中继终端发射功率;G(α,β)为中继终端发射天线在链路方向上的增益值;LUTC为中继终端发射天线与中继终端发射机之间的馈线损耗。
2.4 中继动态链路方程
通信链路是指从信源到信宿的整个通信路径:从信源开始通过编码和调制由发射机经由信道到达接收机结束于信宿。图4给出了一个典型的由发射端到接收端的通信链路模型图。
就中继链路而言,其链路通信方程可以分两部分建立:一部分是中继卫星和地面站之间的链路。由于中继卫星和地面站之间的位置相对固定,这部分链路的各种参数均可认为保持不变,故这部分链路的通信方程为静态的;另一部分是中继卫星和中继终端之间的链路,由于中继终端的位置变化导致链路参数动态变化,文章将这部分链路的通信方程视为动态的。两部分链路的通信方程分别建立如下。
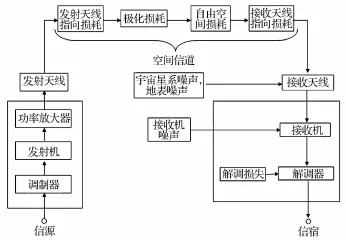
图4 典型通信链路模型图Eig.4 Illustration of typical communication link model
1)中继卫星和地面站之间的链路方程
中继卫星和地面站之间的前向链路、返向链路的静态通信方程可表示为

2)中继卫星和中继终端之间的链路方程
中继卫星和中继终端之间的前向链路、返向链路的动态通信方程可表示为
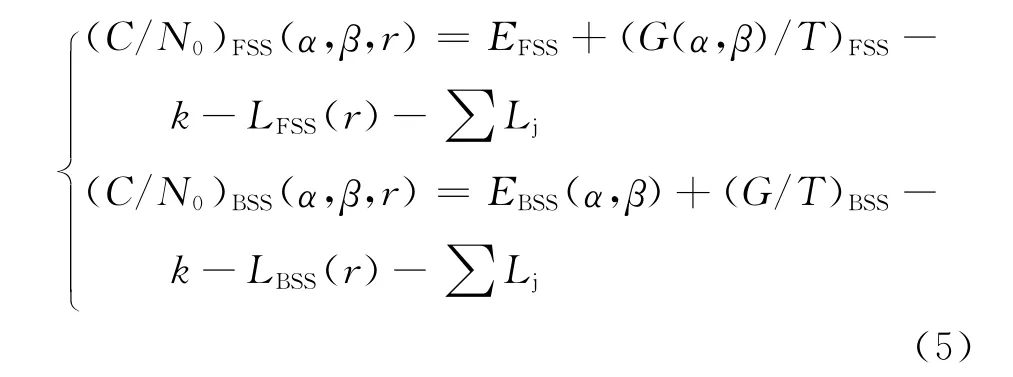
式中:(C/N0)ESG和(C/N0)ESS分别是前向链路中继卫星和地面站之间以及中继卫星和中继终端之间的载波信号与噪声功率谱密度之比(dB·Hz-1);(C/N0)BSG和(C/N0)BSS分别是返向链路中继卫星和地面站之间以及中继卫星和中继终端之间的载波信号与噪声功率谱密度之比(d B·Hz-1);EESG和EESS分别是前向链路中继卫星和地面站之间以及中继卫星和中继终端之间的等效全向辐射功率(dBW);EBSG和EBSS分别是返向链路中继卫星和地面站之间以及中继卫星和中继终端之间的等效全向辐射功率(d BW);(G/T)ESG和(G/T)ESS分别是前向链路中继卫星和地面站之间以及中继卫星和中继终端之间的接收天线链路方向增益与接收系统等效噪声温度之比(dB·K-1);(G/T)BSG和(G/T)BSS分别是返向链路中继卫星和地面站之间以及中继卫星和中继终端之间的接收天线链路方向增益与接收系统等效噪声温度之比(dB·K-1);k为玻尔兹曼常数,单位为(d BW·Hz-1·K-1);LESG和LESS分别是中继卫星和地面站之间以及中继卫星和中继终端之间的前向链路空间传播损耗(dB);LBSG和LBSS分别是中继卫星和地面站之间以及中继卫星和中继终端之间的返向链路空间传播损耗(dB);∑Li和∑Lj为模型中其它各种损耗(dB)。另外需要说明的是,在中继卫星和地面站之间的链路需要考虑大气损耗和雨衰损耗,在中继卫星和中继终端之间的链路没有此种损耗;r为中继卫星和中继终端的空间距离(km)。
2.5 中继链路余量计算
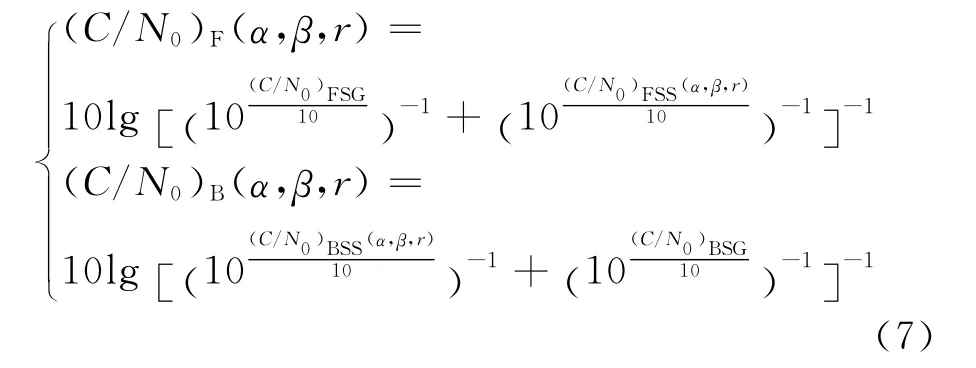
在中继系统中,整个链路总的前向或者返向的(C/N0)C与两部分链路(C/N0)SS和(C/N0)SG之间,符合如下关系(非dB运算):

采用对数(dB)运算,并结合式(4)和式(5),即可计算出前向链路总(C/N0)E(dB)和反向链路总(C/N0)B(dB),如下:
从而计算中继前向链路和返向链路的余量,如下:
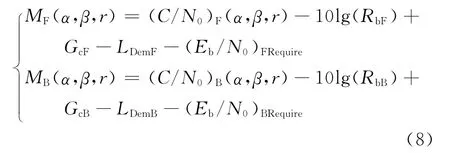
式中:ME和MB分别为中继前向链路和返向链路的余量(dB);RbE和RbB分别为中继前向链路和返向链路的信息速率(bit/s);GcE和GcB分别为前向链路和返向链路的编码增益(dB);LDemE和LDemB分别为前向链路和返向链路的解调解扩损失(dB);(Eb/N0)ERequire和(Eb/N0)BRequire分别为前向链路和返向链路的理论要求值(dB);Eb为每比特能量,等于信号能量S与每比特持续时间的乘积(dBW·Hz-1);N0为噪声功率谱密度(dBW·Hz-1)。
3 中继链路动态计算
链路计算是一种评价通信系统性能的重要方法。链路计算中的链路余量代表了系统性能的“底线”,可以反映系统性能是否满足要求。系统设计时,根据中继链路余量的情况可以权衡优化中继终端的设计,如发射机功率、调制方式、天线增益等;在轨管理或试验时,也可依据中继链路余量分析中继终端可视弧段的哪些位置满足中继前返向链路的建立要求,确定试验时机,验证天线性能等。本节以中继终端和天链一号01星的某仿真可视弧段为例说明中继链路动态计算的方法。
3.1 天链一号01星某可视弧段仿真
本节以中继终端对天链一号01星的某仿真可见弧段为例进行中继链路动态计算。图5所示为该弧段二维仿真示意图。
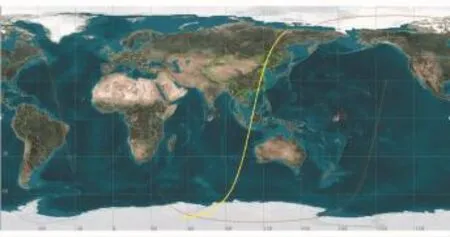
图5 某卫星和天链一号01星某仿真可见弧段(高亮黄色部分)Eig.5 One satellite DRT simulation visible arc with TL-1
3.2 中继终端天线辐射模型建立
在中继链路计算时,中继终端天线链路方向上的增益值是一个关键参数。低轨卫星的中继终端天线一般采取锥形波束或环锥形波束[5],且波束一般关于天线视轴旋转对称[6]。考虑到单根天线仿真结果和单根天线实测结果都与天线装在星体以后的实测方向图存在一定程度的差异。故文章选择某卫星的中继天线辐射数据用于链路计算。星体上的中继天线辐射数据并不是严格关于天线本体坐标系的Z轴对称,链路计算分析时,这就给天线数据的处理带来了不便。同时,从第2.2节中的角度关系可以看出,当中继终端天线的辐射方向图绕Z轴对称时,中继终端天线的波束角和中继卫星在中继终端天线坐标系中的俯仰角成余弦关系,且与方位角无关。
因此,为既使天线辐射数据尽量接近真实值,又便于链路计算,本文把某卫星天线的辐射数据按照旋转对称的特点加以处理并建模,使得天线辐射模型只和波束角有关,而与方位角无关。建模方法和建模结果如下。
将某卫星中继终端天线在方位角0°切面、45°切面、90°切面和135°切面的增益数据取平均值后绕Z轴旋转360°[9-10],得到各方位角切面绕Z轴对称且天线增益值不随方位角的改变而发生变化的中继终端天线增益方向图。中继终端发射天线和中继终端接收天线建立的三维辐射模型加载进STK软件后进行视觉化显示的结果分别如图6和图7所示。
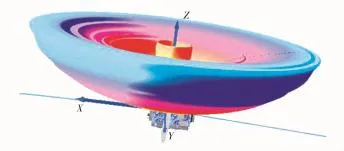
图6 中继终端发射天线三维辐射模型(中继终端天线本体坐标系)Eig.6 DRT transmitting antenna 3D radiation model(antenna body coordinate system)
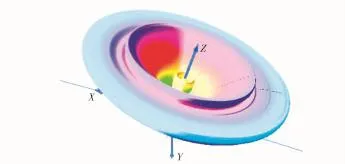
图7 中继终端接收天线三维辐射模型(中继终端天线本体坐标系)Eig.7 DRT receiving antenna 3D radiation model(antenna body coordinate system)
3.3 中继链路动态计算过程
(1)由STK轨道预报得到中继终端某可见弧段不同位置对应的轨道瞬根及经纬度;
(2)计算中继卫星和中继终端之间的作用距离r及中继卫星相对于中继终端的方位角α和俯仰角β;
(3)计算中继卫星和中继终端之间自由空间传播损耗LSS(r);
(4)根据第3.2节中建立的中继天线辐射模型以及第2.3.1节中波束角和俯仰角的关系,得到该弧段不同位置时中继卫星和中继终端在链路方向上的中继天线增益值,进一步得到(G(α,β)/T)ESS和EBSS(α,β);
(5)结合中继卫星和中继终端之间的前向返向动态链路方程计算得到(C/N0)ESS(α,β,r)和(C/N0)BSS(α,β,r)。
(6)结合中继卫星和地面站之间的前向返向静态链路方程计算得到(C/N0)ESG和(C/N0)BSG;
(7)由第2.5节中公式计算出地面站、中继卫星和中继终端的总的前向(C/N0)E和返向(C/N0)B,并计算出整个中继链路的前向返向余量。
4 中继链路结果分析
4.1 弧段起始位置的中继链路余量计算结果分析
仿真弧段起始位置的前向返向全程链路余量计算结果如表1和表2所示。中继前向链路返向链路采用二进制相移键控(BPSK)调制和卷积编码方式。前向链路在满足误码率要求Pe=10-6时的Eb/N0的理论要求值为10.5 dB;返向链路在满足误码率要求Pe=10-5时的Eb/N0的理论要求值为9.4 dB。
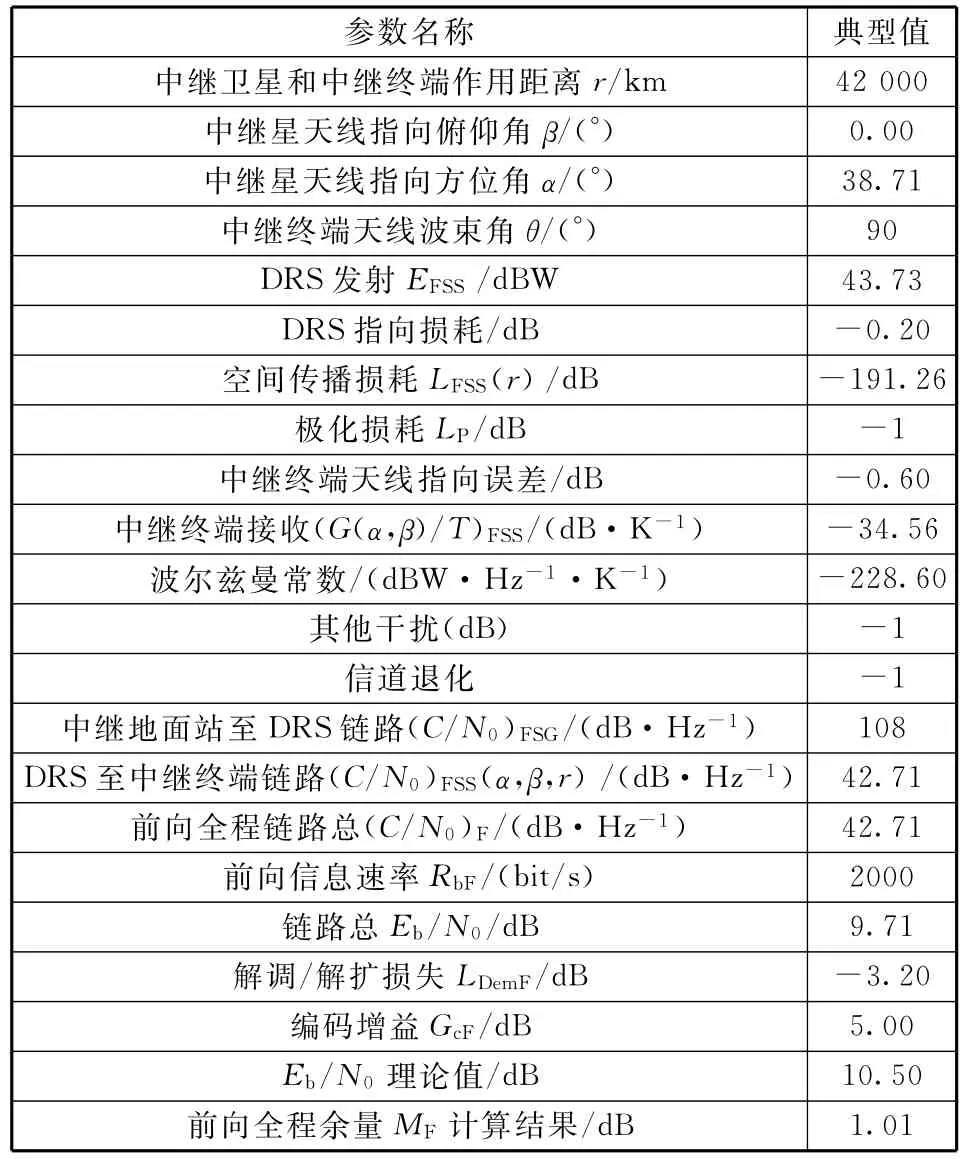
表1 前向中继测控链路余量计算Table 1 Calculation of a forward DRT TT&C link budget margin
表1和表2给出了中继卫星和中继终端之间链路的主要动态参数和静态参数。中继卫星和地面站之间链路的各种静态参数在此不赘述,只给出中继卫星和地面站之间链路的前向(C/N0)ESG和返向(C/N0)BSG最终计算结果。经计算中继卫星和地面站之间的前向(C/N0)ESG和返向(C/N0)BSG的大小分别为108 dB·Hz-1和100 dB·Hz-1,远大于中继卫星和中继终端之间的前向(C/N0)ESS和返向(C/N0)BSS,经式(7)计算可知,中继全程链路的前向(C/N0)E和返向(C/N0)B近似等于中继卫星和中继终端之间的前向(C/N0)ESS和返向(C/N0)BSS。
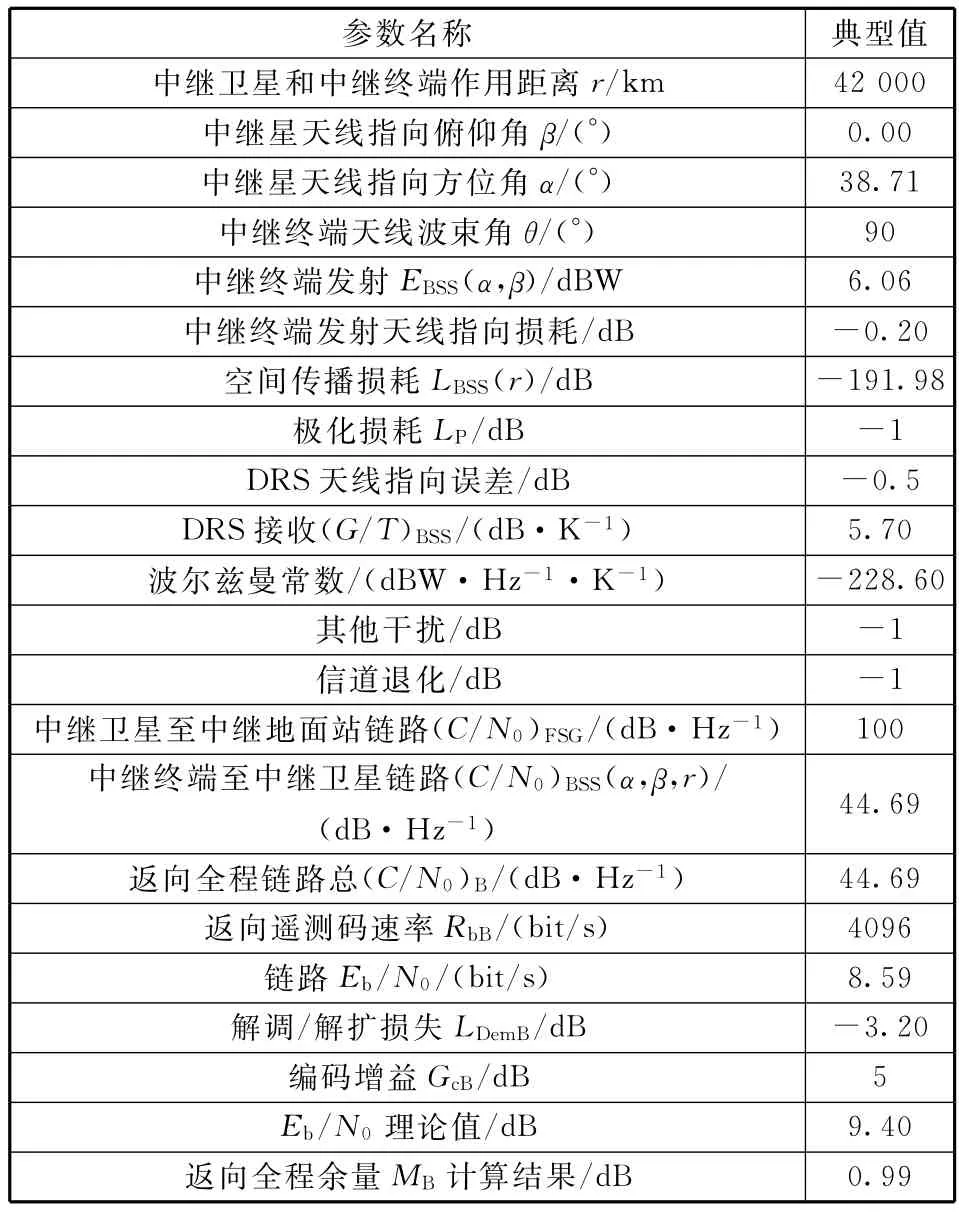
表2 返向中继测控链路计算Table 2 Calculation of one backward DRT TT&C link budget margin
4.2 可见弧段动态链路参数及结果分析
图8给出了某可见弧段中继链路动态分析的结果。图8(a)给出了该弧段前返向全程链路余量的动态变化情况。可以看出在78°S至65°N的弧段,前返向全程链路余量充足,均大于3 dB,可以建立具有较好通信质量的中继测控链路,需要注意的是该范围比可见弧段的纬度范围(80°S至70°N)稍短。图8(b)~图8(f)给出该弧段中继链路参数动态变化的情况。图8(b)给出了天链一号01星在该可见弧段相对于中继终端的俯仰角的变化情况,同时给出了中继卫星和中继终端链路方向上对应的中继天线波束角的变化情况,从图中可以明显看出,在纬度较高地区天链一号01星相对于中继终端的俯仰角较小,而此时中继天线在链路方向上的波束角较大。图8(c)和图8(d)分别给出了中继全程链路的前向总(C/N0)E和返向总(C/N0)B在该可见弧段的动态变化情况。其中,中继卫星和地面站之间的前向(C/N0)ESG和返向(C/N0)BSG的大小分别为108 d B·Hz-1和100 d B·Hz-1,如图中红色直线所示。它们远大于中继卫星和中继终端之间的前向(C/N0)ESS和返向(C/N0)BSS,由式(6)计算得到的前向总(C/N0)E和返向总(C/N0)B曲线几乎分别完全与中继卫星和中继终端之间的前向(C/N0)ESG和返向(C/N0)BSG曲线重合,说明全链路性能主要取决于中继卫星和中继终端之间的链路性能。图8(e)和图8(f)给出了该可见弧段中继终端的G/T值和EIRP值的动态变化情况,中继终端和中继卫星不同链路方向对应着不同大小的中继天线增益值,从而引起中继终端的G/T值和EIRP值动态变化。
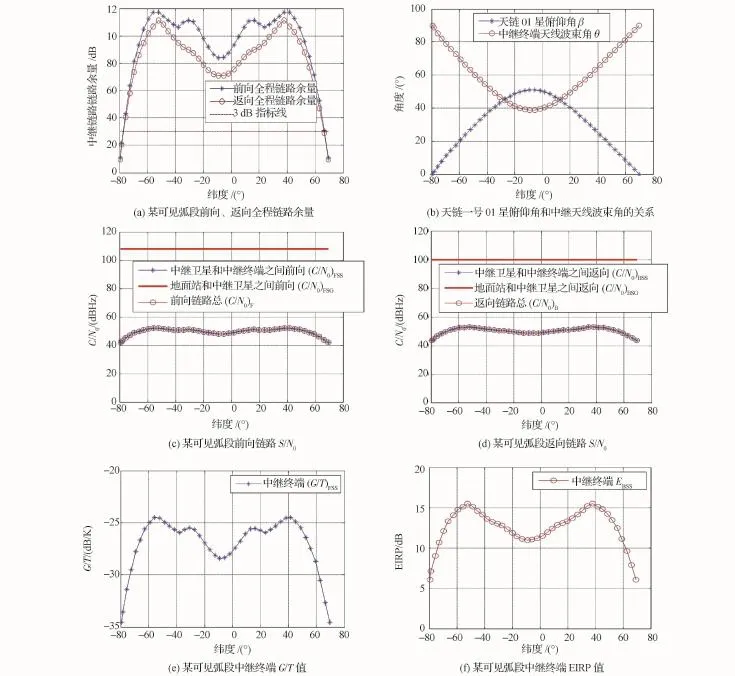
图8 某仿真可见弧段中继链路动态分析结果Eig.8 Dynamic analysis results of one DRT simulation visible arc
5 结束语
数据中继卫星系统以其高覆盖率、高数据率和多目标测控的能力在空间技术的发展,特别是在低轨航天器的天基测控应用中起到了极其重要的作用。作为衡量中继链路性能的重要手段,中继链路的分析与计算显得尤为必要。链路的分析与计算可以使设计师清楚地了解系统的整体设计性能,并可为系统分析与权衡提供依据。本文分析了中继链路参数的动态变化,建立了中继前向、返向动态链路方程,中继链路计算结果表明,中继链路余量大于3 d B的弧段较仿真可视弧段稍短。为保证建立的中继链路具有较好的通信质量,中继业务应尽可能选择在链路余量大于3 dB的弧段内进行。本文中的动态链路计算方法实际可行,有助于确定中继业务开展的时机,对于中继终端实际工程应用和在轨试验具有参考价值。
(
)
[1]刘嘉兴.飞行器测控通信工程[M].北京,国防工业出版社,2010 Liu jiaxing.Spacecraft TT&C and communication engineering[M].National Defense Industry Press,2010(in Chinese)
[2]刘保国,吴斌.中继卫星系统在我国航天测控中的应用[J].飞行器测控学报,2012,31(6):1-5 Liu Baoguo,Wu Bin.Application of TRRSS in Chinese space TT&C[J].Journal of Spacecraft TT&C Technology,2012,31(6):1-5(in Chinese)
[3]王诺,戴逸民.改进的数字化TDRSS中频信号捕获跟踪系统[J].通信学报,2003,24(6):90-98 Wang Nuo,Dai Yiming.Improved TDRSS IE signal acquisition and tracking digital system[J].Journal of China Institute of Communication,2003,24(6):90-98(in Chinese)
[4]Charles C Kegus.Shaped-conical radiation pattern performance of the backfire quadrifilar helix[J].IEEE Transaction on Antennas and Propagation,1975,13:392-397
[5]杨志群,曲晓云.低轨航天器中继测控终端固定宽波束天线覆盖研究[J].航天器工程,2015,24(2):92-97 Yang Zhiqun,Qu Xiaoyun.Study on coverage of fixed broad beam antenna for data relay satellite system TT&C terminal[J].Spacecraft Engineering,2015,24(2):92-97(in Chinese)
[6]黄缙,刘希刚,景泉,等.太阳同步轨道卫星中继测控天线覆盖特性优化研究[J].航天器工程,2015,24(1):90-96 Huang Jin,Liu Xiang,Jing Quan,et al.Studay on coverage performance optimization for relay TT&C antenna of SSO satellite[J].Spacecrafe Engineering,2015,24(1):90-96(in Chinese)
[7]谢刚.GPS原理与接收机设计[M].北京:电子工业出版社,2009 Xie Gang.Principles of GPS and receiver design[M].Beijing:Publishing House of Electronics Industry,2009(in Chinese)
[8]黎孝纯,邱乐德,陈明章,等.星间链路天线指向跟踪系统[M].上海:上海交通大学,2013 Li Xiaochun,Qiu Lede,Chen Mingzhang,et al.Satellite inter-link antenna pointing and tracking system[M].Shanghai:Shanghai Jiaotong University Press,2013(in Chinese)
[9]约翰.克劳斯.天线[M].电子工业出版社,译.北京:电子工业出版社,2004 John D Kraus.Antennas:Eor all applications[M].Publishing House of Electronics Industry,translated.Beijing:Publishing House of Electronics Industry,2004(in Chinese)
[10]丁溯泉,张波,刘世勇.STK在航天任务仿真分析中的应用[M].北京:国防工业出版社,2011 Ding Suquan,Zhang Bo,Liu Shiyong.Application of STK on aerospace mission simulation and analysis[M].Beijing:National Defense Industry Press,2011(in Chinese)
(编辑:张小琳)
Research on Dynamic Analysis and Calculation Method of Data Relay Terminal TT&C Link
KANG Guodong1NING Jinzhi1LI Qi1CAI Yaxing2LI Hongbao1
(1 DEH Satellite Co.Ltd.,Beijing 100094,China)
(2 Institute of Telecommunication Satellite,China Academy of Space Technology,Beijing 100094,China)
Link budget of data relay terminal(DRT)TT&C link is one of the most important methods for DRT link performance analysis.In terms of any visible in-orbit arc of DRT,the relative positions between it and data relay satellite(DRS)are keeping on changing.This leads some link parameters to vary with time and positions dynamically.This paper proposes a dynamic analysis and calculation method of DRT TT&C link,constructs dynamic link communication equations.Einally,the paper adopts a DRT TT&C visible simulation arc with TL-1 as an example for performing dynamic analysis and computation of DRT TT&C link.The results demonstrate that the link calculation and analysis method in this paper is practical and valuable for DRT engineer application and in-orbit test.
DRT TT&C;DRT dynamic link communication equation;DRT link analysis
V556.1;V556.8
A DOI:10.3969/j.issn.1673-8748.2015.03.002
2015-03-17;
2015-05-08
康国栋,男,工程师,从事小卫星测控分系统设计工作。Email:kongton584@163.com。
猜你喜欢
现代工业经济和信息化(2022年9期)2022-11-03
中国船检(2020年11期)2020-11-27
计算机技术与发展(2020年4期)2020-04-30
电加工与模具(2020年2期)2020-04-29
无线电通信技术(2020年1期)2020-01-15
无线电通信技术(2019年1期)2019-12-24
中国新通信(2019年23期)2019-03-27
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
中国科技纵横(2016年14期)2016-10-10
