“嫦娥4号”中继星应急轨道控制策略设计与分析
2019-09-02 00:34:26马传令梁伟光
深空探测学报 2019年3期
马传令,刘 勇,2,梁伟光,张 尧
(1.北京航天飞行控制中心,北京100094;2.航天飞行动力学国防科技重点实验室,北京100094)
引 言
地月系L2 点是地月系统中5 个平动点之一,位于地球至月球连线的延长线上。由于平动点特殊的动力学特性和在三体问题中相对固定几何位置,使其在停泊中转、中继通信、天文观测、星际转移等深空探测任务中具备良好的工程应用价值。
国外已开展了多次平动点探测任务,发射了如“国际日地探测卫星3号”(International Sun-Earth Ex‐ploration Satellite-3 ,ISEE-3),“太阳风科学卫星”(Wind),太阳和日球层探测器(Solar and Heliospher‐ic Observatory,SOHO),要素/同位素成分高级探测器:“美国科学卫星”(Advanced Composition Explor‐er,ACE),威尔金森微波各向异性探测器(Wilkin‐son Microwave Anisotropy Probe, WMAP) 等 探 测器,但这些大多为利用日地L2 平动点开展的科学探测活动。对于地月系平动点,虽然早在20 世纪70 年代,Farqubar 就提出了发射一颗中继卫星至地月L2点Halo 轨道以支持月背面载人探测任务的设想,但直到2011 年,美国Artemis 任务才首次进入地月系L1/L2 点的Lissajous 轨道进行探测[1]。近年来,我国也先后开展了两次平动点探测任务,分别是2011 年的“嫦娥2 号”的日地系L2 点Lissajous 轨道拓展试验,以及2014年底的“嫦娥5号”飞行试验器服务舱的地月系L2 点Lissajous 轨道拓展试验[2]。与此前两次地月平动点任务不同,“嫦娥4 号”中继星是首个采用Halo 轨道的地月系平动点任务,为人类首次月背软着陆巡视探测提供中继通信链路。“嫦娥4 号”中继星经发射段、地月转移段、月球到L2 点转移段、L2 点捕获段和使命轨道段5 个飞行阶段,最终将围绕在地月L2 点的Halo轨道上运行3年。在整个飞行过程中,中继星要进行多次轨道机动[3],Halo轨道对转移飞行及捕获控制策略的要求比Lissajous轨道更为严格。为保障中继任务的顺利开展,轨道设计和工程实施对空间几何、测控光照、速度增量和长期稳定运行支持等约束以及应急轨道重构策略选择提供了更高的要求。
工程实践中,飞行器入轨或控制出现异常或超出设计指标,按正常控制策略可能需要很大代价或者不能完成任务时,则需进行应急轨道重构。国内外学者针对月球探测和载人登月应急轨道重构问题开展了较多研究。董捷等[4]分析了一次近月制动条件下,由于推力偏差和制动推质比较大,速度增量关机失效时自主时间关机和地面支持关机存在的轨道安全性问题。针对此问题,按近月制动前后的不同阶段设计了3种安全关机策略,包括相关的发动机标定、轨控实时监视干预以及应急提升近月点。黄文德等[5]分析了载人登月近月段由于主发动机失效可能引起的轨道类型以及与之对应的中止方式,给出了中止轨道在能量消耗、飞行时间等方面的特性以及仿真算例。在“阿波罗”(Apollo)计划中,研究人员分析了典型的Apollo飞行过程中的任务中止问题[6],其中对近月段的中止进行了详细的论述。近年来,美国的科研人员又对新登月计划“星座计划”的任务中止问题进行了研究,并与Apollo 的任务中止问题进行了比较。但上述文献大部分只给出研究结论,未给出计算模型和分析方法,或只作简单说明。
国内外与工程实践结合的平动点任务全寿命应急轨道重构研究几乎很少。“嫦娥4号”中继星与地球轨道的中继通信卫星不同,也与月球轨道的探测器差别较大,是一个全新的任务,面临一些技术上的挑战,需要提出有效的解决方案,才能为“嫦娥4号”月球背面着陆探测任务提供稳定可靠的中继通信保障。
本文基于“嫦娥4号”中继星的设计轨道,充分考虑工程约束和任务需求,系统地梳理了卫星全寿命不同飞行阶段与应急轨道重构相关的故障模式、故障类型和故障阶段,给出了应急轨道重构约束条件并设计了三级应急重构控制目标,提出了可行的应急轨道重构策略和处置方法,并给出部分仿真算例,得到一些有益的结论。
1 故障类型及分析
“嫦娥4号”中继星主要飞行过程如图1所示:
“嫦娥4 号”中继星采用了小卫星平台,整星重量不超过450 kg,采用单组元推进系统、落压工作模式、双分支结构,互为备份。中继星共配置了4 台20 N推力轨控发动机,2台20 N发动机工作也能完成任务,同时5 N 姿控发动机也能起到一定备份作用,工作组合多。中继星采用2个70 L的推进剂贮箱,装载了105 kg的无水肼推进剂,约100 kg可用,可产生速度增量549 m/s。中继星的推进剂消耗主要在以下方面:地月转移轨道过程中的中途修正、近月制动和L2 点Halo 轨道捕获以及长期运行过程中的轨道维持[7]。与应急轨道控制相关的卫星故障可归纳为以下方面。
1)入轨异常。主要故障原因有火箭提前关机、火箭姿控异常、火箭推力不足和火箭不能正常关机。火箭提前关机和火箭推力不足将造成入轨轨道偏低。火箭姿控异常将造成6个轨道要素都有较大偏差,火箭不能正常关机将造成入轨半长轴偏大。所有这些故障都将增加中途修正的速度增量。
2)发动机不可用。发动机在不同时刻出现故障时对应的应急处置方式不同,如果在正常计算和注入前发现发动机不可用,可更换发动机在预定时刻轨控,而其它时刻发现发动机故障需采用其它处置方法。
3)姿控异常或者发动机未能按时打开都可能造成某次变轨未能实施或者变轨滞后。发动机提前关机、推力不足将导致控制量不足。近月制动变轨未实施、滞后、控制量不足会造成中继星可能飞离月球且无法形成绕地大椭圆轨道,地面需考虑尽快实施补充控制,减小故障影响。除此之外的其它轨道控制,可根据故障情况决策是否补充控制,若不进行补充控制,需调整后续控制策略消除该故障影响。
4)发动机未能按时关机将导致控制量过大。中途修正过程中发生该故障,需根据控后实际轨道判断是否需增加一次中途修正消除该故障影响。在近月制动过程发生该故障,根据目前中继星现有能力,即使所有速度增量均用于近月制动,也无撞月风险。因此,若近月制动无法按时关机,不会发生撞月,但有可能形成环月轨道,需调整后续控制策略消除该故障影响。
总体而言,故障发生的阶段不同,紧急程度和危害程度也不同。本文在分析故障时,不考虑多重故障。
2 应急轨道控制策略及分析
2.1 应急控制约束条件
根据工程目标和卫星工况,应急轨道控制策略设计的约束条件包括以下方面:
1)尽可能使中继星进入Halo轨道并满足任务需求,中继星在轨工作时间满足着陆器巡视器工作需求(3个月)。
2)尽可能为控制过程提供测控支持。
3)20 N发动机单次最长开机时长1 800 s,最小开机时长10 s。
4)推进剂限制:若考虑将使命轨道运行时间缩短,故障处置可用速度增量将增多。在推进剂总量一定前提下,推进剂余量不同所能实现的目标不同,下面定义如下几个目标:目标一,使命轨道(Halo)运行3年,故障处置可用速度增量55 m/s;目标二,使命轨道(Halo)运行1 年,故障处置可用速度增量127 m/s;目标三,非使命轨道(Lissajous)运行1年,故障处置可用速度增量205 m/s。
若故障处置所需速度增量过大,导致中继星无法在使命轨道运行1 年,可不进行Halo 轨道捕获控制,即中继星工作于Lissajous轨道,由于不需三次捕获控制,故障处置可用速度增量增加80 m/s 左右(目标三)。此外,应急控制策略设计还需兼顾敏感器、飞行程序、测控、能源、故障处置时间等约束[8-10]。
2.2 入轨异常应急轨道控制策略
中途修正控制目标为到达近月点的升降轨方式、近月点高度、近月点倾角等。入轨异常故障由火箭系统引起,会造成入轨轨道与标称轨道偏差较大,正常中途修正可能无法完成任务。该类型故障最典型的表现是火箭提前关机,卫星获得能力较小。对于半长轴误差,越早修正,所需速度增量越小;而角度误差相反,越晚修正,所需速度增量越小。由于两种误差发散趋势相反,应急控制时机需根据实际轨道误差情况分析确定,一般可同时计算多个时机的修正量,选择修正量小的时刻实施。
入轨轨道过低主要影响轨道半长轴和偏心率,对其它轨道参数影响不大,备选处置策略有:①预定时刻正常中途修正;②提前进行中途修正;③多圈调相后转移。
图2分别给出了不同入轨半长轴在不同时机(入轨3 h至入轨10 h)实施中途修正的速度增量。
上图表明,提前修正能够增大可应对的入轨半长轴偏差,提前修正推进剂消耗明显小于正常修正,且半长轴越小,节省推进剂越多,且提前修正对后续控制策略影响不大。可提前时间需根据入轨后飞行程序和修正准备流程具体确定。
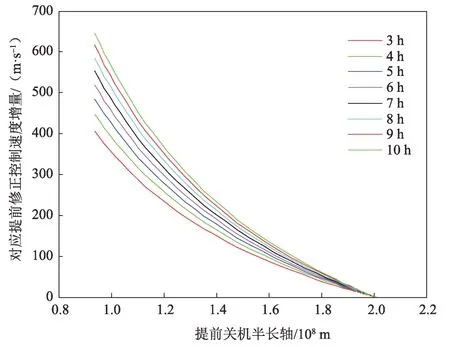
图2 不同入轨半长轴在不同时刻的中途修正量Fig.2 Mid-range correction amount of different semi-major axes at different time
若入轨半长轴偏差过大,提前修正不足以使卫星进入使命轨道,可采用多圈调相转移策略处置,具体如下:①在远地点抬高近地点调整中继星轨道周期,保证某圈近地点测控可见和安全性;②在近地点施加脉冲抬高远月点并调整轨道周期,使得地月转移入口测控可见;③在地月转移入口近地点附近施加脉冲,控制中继星进入地月转移轨道;④后续按正常中途修正和近月制动实施。
图3为火箭入轨半长轴8.7万km时,采用多圈调相转移策略得到的中继星全程设计轨道。
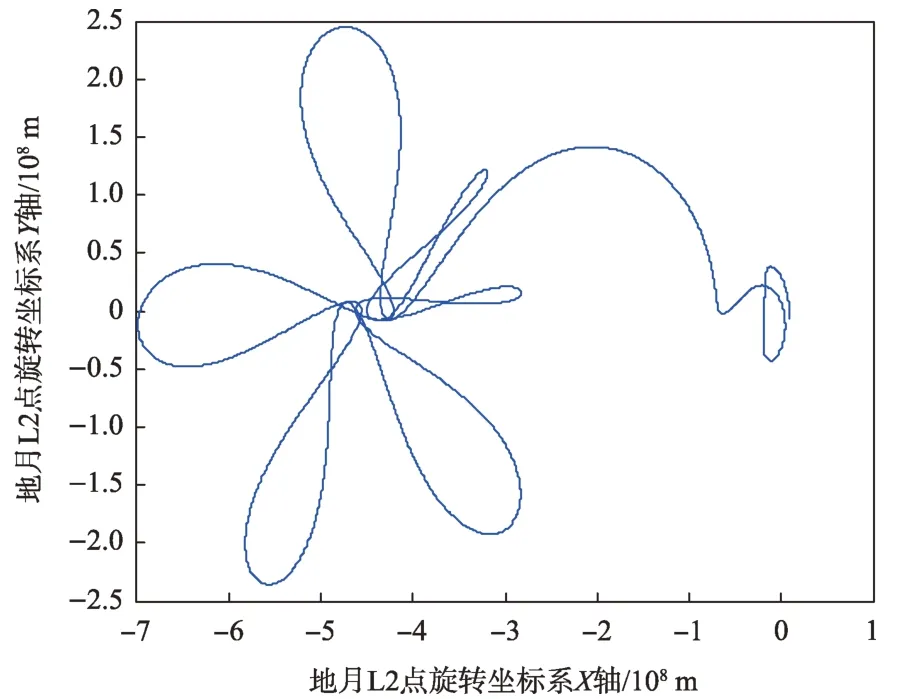
图3 多圈调相转移策略中继星飞行轨迹(地月L2旋转坐标系)Fig.3 Flight trajectory of relay satellite of multi-circle phase modulation transfer strategy
在近地点实施一次或几次机动,调整轨道周期,可使下个月转移入口近地点时刻与标称设计轨道地月转移入口时刻相差27.321 66 d(月球平均公转周期),然后实施进入地月转移控制,该策略能使地月转移轨道与原标称轨道接近;但是,由于月球回到1个月前的位置时,地球没有转到同样位置,存在地月转移控制测控不可见的较大风险。通过在近地点加速,使轨道周期为整天,并适当抬高远地点,可以保证较好的测控条件,这将使得进入地月转移时间最大相差16.28 h(28~27.312 66 d)。推迟1 d进入地月转移轨道时,中途修正速度增量约75 m/s,因此,额外的速度增量不超过75 m/s。由于轨道绕地球运行约1 个月,受摄动影响,倾角、升交点赤经和近地点辐角也有变化,这也要增加中途修正速度增量。实际控制时需根据入轨轨道周期、测控条件、目标轨道以及能源情况重新设计。
其它轨道要素偏差与中途修正量呈线性关系,火箭提前关机主要造成半长轴和幅角的误差,在火箭出现其它故障的情况下,升交点和倾角等轨道要素也会偏差较大,而中途修正时刻对半长轴误差和角度误差的放大系数不同,需要根据实际轨道确定处置措施。
2.3 中途修正异常应急轨道控制策略
正常情况下,地月转移段安排2~3次中途修正,滞后3 h中途修正比正常修正量增加约15%。中途修正非紧急故障,综合考虑工程约束,中途修正异常可在故障排除后3 h 滞后控制。执行预定的第1 次中途修正主要原因是入轨偏差较大,需尽快修正轨道误差,避免因推迟造成误差发散过大;根据控后轨道计算的第2次中途修正控制量小于剩余应急控制可用增量,则不进行应急轨道控制,否则应在3 h后再次进行修正控制;第2次中途修正控制偏差情况下,根据控后轨道计算的第3次中途修正速度增量大于剩余应急控制余量,则3 h 后再次进行修正控制。第3 次中途修正速度增量偏差1.6 m/s 时中继星即可能降到月面,10 m/s 速度偏差最大能改变近月点高度670 km,往后推迟越多付出的代价越大,如果此时发生故障,应根据故障情况分析后续轨道的影响,如果有安全问题或近月点参数不满足设计指标,则在故障排除后3 h再次进行修正。
2.4 近月制动异常应急轨道控制策略
中继星近月制动控制目标为制动后第3次穿越旋转坐标系XOZ面时的X向速度为0,卫星进入地月L2点附近的稳定流形,飞行3~4 d 后进入L2 点附近的Lissajous 轨道;采用 4 台 20 N 发动机和 8 台 5 N 发动机组合控制,主要速度增量由4 台20 N 发动机完成,8 台5 N 发动机故障对后续轨道影响较小。因此,近月制动故障主要考虑4台20 N发动机故障情况。
2.4.1 近月制动滞后开机
4台20 N发动机发生故障后无法按照预定时刻开机,若故障迅速排除,可重新开机制动,中继星无法重新调姿,因此保持原开机姿态、滞后执行近月制动;若故障不能迅速排除,待故障排除后重新调姿实施近月制动。
由于近月点附近轨道变化快,滞后控制对轨道的影响明显,滞后开机且不重新调姿实施近月制动情况下,随着滞后时长增大,近月制动控制量增大,但对后续第2次捕获和第3次捕获控制量影响不大,捕获控制所需总速度增量小于80 m/s。目标一、二应急控制可用增量对应4 台20 N 发动机可滞后开机时间约12 min和21 min,超出该范围会缩短使命轨道运行时间。对于4 台20 N 未按时开机且故障可迅速排除工况,可采用不重新调姿滞后实施近月制动策略,预先按不同滞后时间制定多个故障应急轨控数据块,故障出现后按照时间就近原则选择上述数据块。
近月制动滞后开机重新调姿工况,随着滞后时长增大,近月制动和第2次捕获的控制量增加,第3次捕获控制量变化不大。按照目标一应急控制可用增量考虑,中继星近月制动滞后开机时长大于15 min时,重新调姿实施近月制动超出中继星应急控制可用速度增量,影响中继星使命轨道运行时间。
2.4.2 近月制动提前关机
对于近月制动提前关机、控制量不足工况,中继星故障迅速排除可继续实施近月制动时,分两种策略处置:一是采用原轨控姿态,按照剩余轨控时长制动。因无法重新定轨和计算轨控参数,3 h 后进行补充修正,3 h进行修正控制量小于3 m/s,对后续Halo轨道轨迹影响不大;二是采用原轨控姿态,4台20 N发动机再次开机进行制动。在计算正常近月制动控制参数时,预先准备多组不调姿再次开机控制参数和注入数据块,故障发生后,如姿控发动机能够再次开机,则根据已开机时长和预计的可再次开机时刻选择一组应急轨控注入数据,注入再次开机的开机时长。
如故障不能迅速排除,需考虑已开机时长重新确定轨控参数和速度增量,根据最新定轨数据计算3 h后应急制动策略。近月制动提前关机且故障无法排除时,提前关机时间越长,3 h 后修正控制量越大,目标一、二应急可用增量对应近月制动提前关机最大时长分别约2 min和3 min,且对后续捕获控制速度增量影响较大,但对使命轨道运行轨迹影响不大。
2.4.3 近月制动未执行
若4 台20 N 发动机未开机且故障无法被迅速排除,中继星可能飞离月球且无法形成绕地大椭圆轨道。目标一、二应急可用增量对应4台20 N发动机可允许最大开机滞后时间约为12 min和21 min,超过该时间中继星飞离月球后将无法通过变轨机动重回月球。如事先确定4台20 N故障,可提前决策采用8台5 N 发动机近月制动,如可确定部分20 N 发动机故障,可考虑使用其它正常20 N 发动机近月制动,避免中继星飞离月球,小推力发动机开机将超出最大开机时长限制且重力损耗较大。
2.4.4 近月制动未按时关机
根据中继星现有能力,所有速度增量均用于近月制动也无撞月风险,因此,若近月制动无法按时关机不会发生撞月,但有可能形成环月轨道。处置策略一是3 h后进行轨道修正;策略二是中继星在环月轨道上飞行1圈或数圈后,在近月点实施加速飞往L2点。
处置策略一控后3 h 补充修正速度增量与近月制动时长近似成线性关系,开机时长每增加10 s,对应修正量增加11.5 m/s,近月制动速度增量增加3 m/s,总增加约14.5 m/s,目标一、二应急可用增量对应4台20 N 发动机可允许的最大延迟关机时间约为40 s和90 s。
策略二实施时,在第一个近月点实施加速,控制中继星进入环绕L2 点的Lissajous 轨道;然后以第2次捕获控制时刻和第3 次捕获控制相位为优化变量,搜索速度增量最小、幅值为1.3万km的Halo轨道。
图4 为绕月1 圈后再次加速进入使命轨道策略示意图。
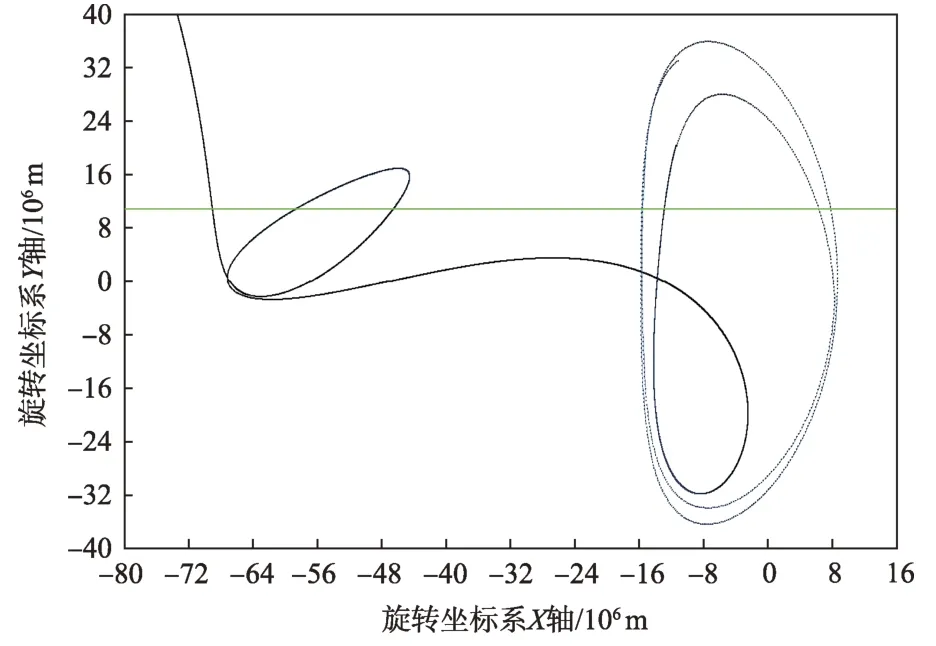
图4 中继星绕月加速进入Halo轨道示意图Fig. 4 Illustration of flight trajectory of transfer strategy from circumlunar orbit to Halo orbit
2.5 L2转移段异常应急轨道控制策略
正常情况下L2 转移段共安排2 次中途修正,控制目标与近月制动相同,即第3次过旋转坐标系XOZ平面时X向速度为0。
滞后3 h 中途修正比准时修正的速度增量增加约10%~15%,中途修正非紧急故障,可选择在故障排除后约3 h进行滞后控制;若故障未能迅速排除,则考虑在1 d后根据测控条件择机再次修正,滞后1 d修正比准时修正的速度增量增加约90%。
2.6 Halo轨道捕获应急控制策略
Halo轨道捕获控制拟安排3 次捕获控制和3 次修正,第1 次捕获控制的设计速度增量为0,其控制目标与L2转移段修正相同。第3次捕获控制对形成Ha‐lo轨道至关重要,如果控制精确,后续控制和维持即可按Lissajous轨道控制方式进行控制,否则需要再次进行Halo 轨道进入控制。因此,故障分析主要针对第2次、第3次捕获控制变轨未实施进行分析。
2.6.1 第2次捕获控制推迟
第2次捕获控制用于瞄准预定的使命轨道目标位置,若第2次捕获控制在发生故障后无法按照预定时刻进行开机控制,需根据故障情况考虑推迟执行(见表1)。
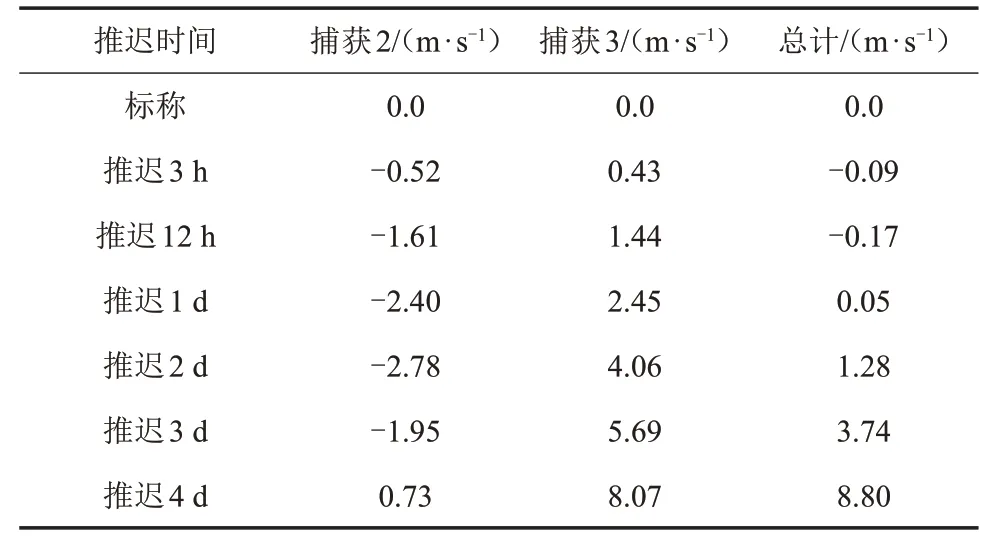
表1 第2次捕获控制推迟后续控制量与设计值偏差Table 1 Total velocity increment and additional consumption of different delayed 2nd capture maneuver
第2次捕获控制量随时间发散较为缓慢,滞后控制时间对速度增量影响不大。因此,按照现有的处置能力和精度指标,若第2次捕获控制未成功开机,可在4 d内择机执行。
2.6.2 第3次捕获控制推迟
第3次捕获控制用于瞄准预定的使命轨道目标速度,若第3次捕获控制在发生故障后无法按照预定时刻进行开机控制,需根据故障情况考虑推迟执行,表2给出第3次捕获控制滞后不同时间情况下控制所需速度增量。
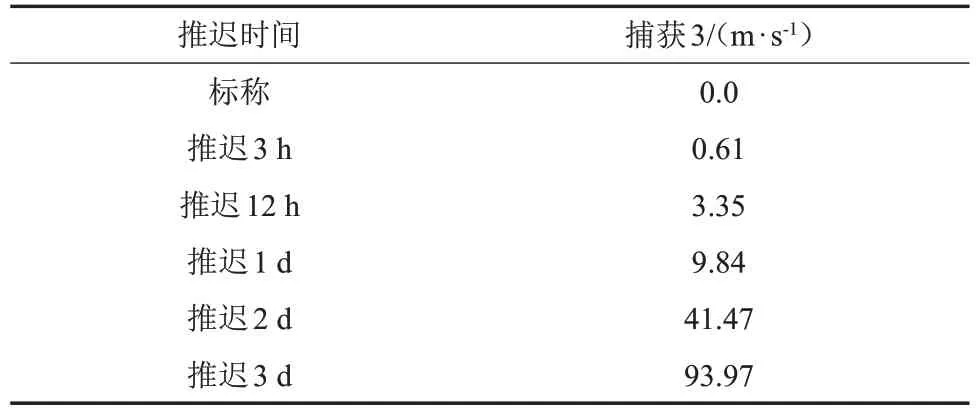
表2 第3次捕获控制推迟后续控制量与标称值偏差Table 2 Velocity increment and additional consumption of different delayed 3rd capture maneuver
第3次捕获控制推迟后续飞行轨迹如图5所示。
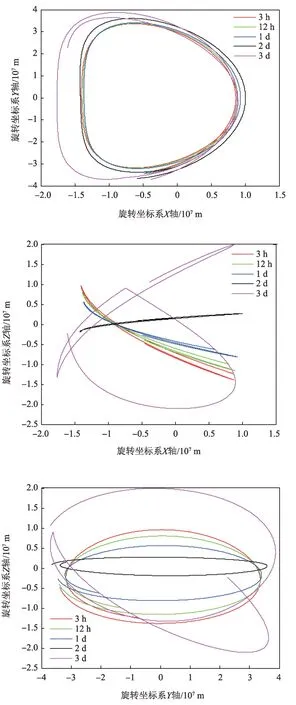
图5 第3次捕获控制推迟中继星运行轨迹Fig. 5 Illustration of flight trajectories of different delayed 3rd capture maneuver
随着开机时间的推迟,第3次捕获控制增量迅速增大,且由于控制位置偏离标称位置较大,控后轨道形状与使命轨道目标形状差异较大,推迟2 d 控制时,Halo轨道Z向振幅已接近5 000 km,容易出现月掩,因此,在故障可迅速排除的情况下,需在3 h后尽快实施第3 次捕获控制。如果控制推迟1 d 以上,则需重新选取使命轨道目标位置和速度,再次实施捕获控制。
2.7 使命轨道维持应急控制策略
2.7.1 轨道维持超差工况
中继星进入使命轨道后,每半圈(约7 d)进行一次轨道维持,轨道维持采用拟Halo轨道控制方式,即控制量为3个方向的速度增量,控制目标为控后第3次穿越XOZ平面的X方向速度为0[9-11]。
由表3 可见,Y方向的速度偏差修正量比较大,在X和Z方向加偏差,修正量相对较小。在延迟天数较小时,修正量变化缓慢,随着延迟时间的增加,修正量迅速增大;初始误差越大推迟修正所需的速度增量放大倍数也越大。总的来说,随着时间的延迟修正量在逐渐增大。因此,为减小误差修正量,需在维持故障排除后尽快修正。
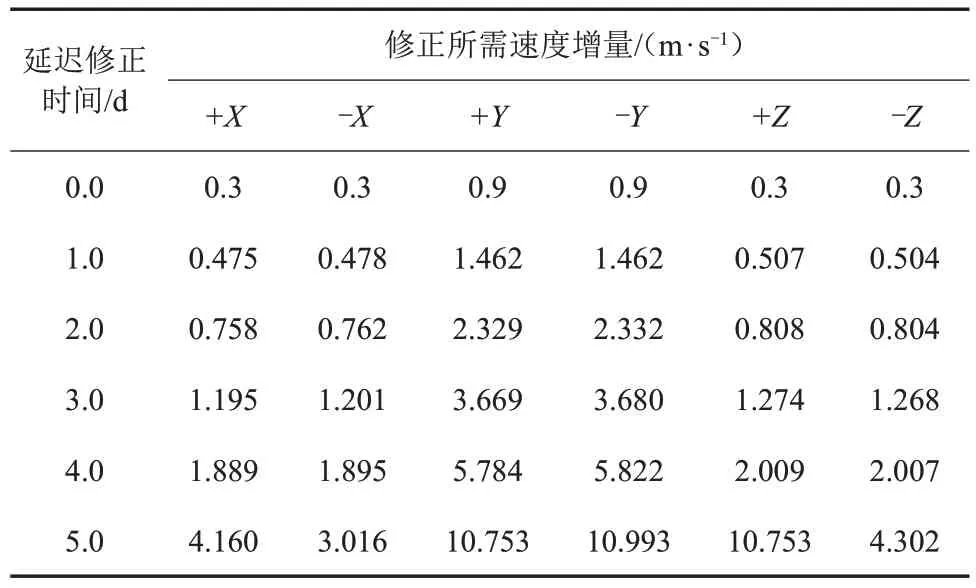
表3 维持误差情况下延迟修正所需速度增量Table 3 Velocity increment of different delayed keeping maneuver considering control errors
对于维持未开机的故障,且开机速度增量小于5 m/s,如果轨道未被扰动,则在1 d后再次实施。
对于控制超差,如果根据遥测数据分析误差超过5 m/s,则根据控后估算轨道计算维持控制参数,在3 h后再次实施,否则在2 d内根据测定轨结果对误差进行修正。
2.7.2 长阴影规避策略
中继星在使命轨道飞行时,存在进入阴影的可能。阴影包含地影和月影。地影和月影每月均会自东向西扫过Halo 轨道区域,当中继星与阴影运动方向一致时,会长时间陷入阴影[11]。阴影特点如下:
1)地影平均时长2 h 左右,3 年内无法完全避免,即地影与Halo轨道相位无关;
2)月影与Halo轨道相位有关;
3)存在3年内无月影的相位,该类相位占少数,且由于轨道测控误差的长期累积,难以精确设计和预报长期无月影的相位;
4)中继星使命轨道的恶劣月影,本影最长时可达6 h以上,且由于使命轨道的周期近似为朔望月的一半,恶劣月影出现的前后数月也会存在较长的月影。长阴影会严重威胁中继星平台安全,因此,有必要针对长阴影设计应急规避轨道控制策略。
由于月影分布的离散性,以调相为主要控制目标,可以实现对月影的有效规避,可考虑选取Halo轨道内直接调相、月球借力调相、飞经地月L1 点调相3 种方式,3 种调相均能有效缩短阴影时长甚至消除阴影,具体需结合月影应急规避需求,选择适用的调相方法。
2.8 未进行Halo轨道捕获应急控制分析
在入轨过低、近月制动异常故障处置超过应急控制可用增量时,剩余推进剂不足以完成Halo 轨道捕获,可考虑应急捕获为Lissajous轨道的方式,可增加应急控制可用速度增量约80 m/s,让中继星在Lissa‐jous轨道完成中继测控任务。
当中继星运行在Lissajous轨道时,存在进入月掩带的可能,从而无法进行星地通信[12]。
由于应急Lissajous轨道的入口状态无法确定,导致Lissajous轨道构型和中继星相位难以确定,采取初始位置、初始方向、轨道振幅分别遍历的方法,对月掩影响进行多角度分析,得出以下结论:
1)无月掩持续时长与XY平面内振幅和Z向振幅均呈相关,与最大振幅的关系如表4所示;

表4 Lissajous轨道最大振幅与最长持续无月掩时间关系Table 4 The relationship between the maximum amplitude of Lissajous orbit and the longest duration of lunar occlusion
2)卫星进入月掩的最长时长约为14 h,进入月掩时长约占总飞行时长的0.5%;
3)卫星频繁进入月掩期间的总时长约为20~30 d,两次进入月掩的时间间隔约为7 d。频繁进入月掩期间,进入月掩时长约占总时长的10%以下。
综上,中继星如果沿地月L2 点Lissajous 轨道飞行,可以在大部分时间支持中继通信。进入月掩的占比较小,至多持续半天,且可以预报,因此Lissajous轨道也可以满足基本的中继通信需求。此外,Lissa‐jous轨道在环绕周期、轨道维持、星月距离、EPM夹角等方面,均与Halo 轨道相类似。因此,Lissajous可以作为Halo 轨道难以捕获时的中继星备选使命轨道。
3 结 论
本文结合“嫦娥4号”任务需求和工程约束,梳理了中继星全寿命各阶段与轨道控制相关的故障模式,在推进剂总量一定的前提下,设计了三级应急控制目标,给出了应急轨道控制策略、长阴影规避策略以及部分分析结果;在Halo 轨道难以捕获的极端情况下,提出将Lissajous轨道作为备选使命轨道,能够满足基本的中继通信需求。研究成果经过“嫦娥4号”中继星任务的在轨飞行验证,具有重要的工程应用价值,为深空探测任务特别是平动点任务的应急轨道控制策略设计提供借鉴。
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:12:22
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
法律方法(2019年4期)2019-11-16 01:07:28
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
电信科学(2017年6期)2017-07-01 15:44:35
电信科学(2016年9期)2016-06-15 20:27:25
航天器工程(2015年3期)2015-10-28 03:35:28
电子设计工程(2015年16期)2015-02-27 12:07:58