一种航天测控冗余跟踪弧段处理方法
2024-03-08 02:52:28李晓明孟德闯
上海航天 2024年1期
陈 海,李 斌,李晓明,孟德闯
(北京航天飞行控制中心,北京 100094)
0 引言
在航天任务中,为了稳定可靠地获取航天器遥测信息或各类载荷数传数据,会安排多个天地基测控设备持续跟踪,以便开展航天器上行控制或遥外测数据接收等工作[1-4]。当前,虽然我国天地一体化航天测控体系日趋完善[5-7],但随着在轨航天器数量的日益增多[8-11],测控资源的使用率也越来越高,因此,有限的测控资源面临越来越严重的争用冲突[12-18],如何高效利用测控资源越来越备受关注[19-25]。
为有效利用现有测控资源,提出了1 种基于冗余度评价函数的跟踪弧段处理方法,针对2 弧段搭接及多弧段搭接的情况,分别构建了冗余度评价函数,并详细设计了冗余弧段的剔除处理方法和实施步骤。该方法在不降低跟踪总时长情况下,合理分配测控资源,剔除了冗余跟踪弧段,有效提高了测控资源使用率。
1 2 弧段搭接状态下弧段冗余度评价方法
2 个弧段的搭接情况相对简单,其搭接状态可以分为如下3 种:
1)弧段1 的跟踪区间和弧段2 的跟踪区间首尾之间无任何搭接,如图1 所示。

图1 2 个弧段不搭接Fig.1 No overlap between two tracking arcs
2)弧段1 的跟踪区间和弧段2 的跟踪区间之间局部覆盖交叉,这种情况可描述为简单搭接,如图2所示。

图2 2 个弧段前后搭接:简单搭接Fig.2 Simple overlap of two tracking arcs
3)弧段1 的跟踪区间全部覆盖弧段2 的跟踪区间,这种情况可描述为完全覆盖,如图3 所示。

图3 2 个弧段前后搭接:完全覆盖Fig.3 Full coverage of two tracking arcs
现将所有的测控弧段记为R=(R1,R2,…,Rj),j=1,2,…,n,其中,Rj=(Sj,Ej,dj)为第j个弧段的测控信息,Sj为第j个弧段的开始时刻,Ej为第j个弧段的结束时刻,dj为该弧段的冗余度评价值。
为量化评价2 个弧段搭接的情况,假定在i<j(即Si<Sj)情况下,2 弧段搭接情况下的冗余度函数可定义为dj=f(Ri,Rj),该函数表示弧段Rj的冗余度,它描述了Ri和Rj之间的搭接状态情况。根据2 弧段搭接状态的3 种情况,构建弧段Rj的冗余度函数如下:
当dj=0 时,可判断弧段Ri和Rj属于不搭接的情况;当dj=1 时,可判断弧段Ri和Rj属于简单搭接的情况;当dj=2 时,可判断弧段Ri和Rj属于完全覆盖的情况,并且弧段Rj即是本文要处理的冗余弧段。
2 多弧段搭接状态下弧段冗余度评价方法
3 个弧段跟踪区间的搭接情况可以描述多弧段跟踪区间的搭接情况,因此,可以统一构建3 个弧段搭接情况下的冗余度评价函数来统一描述。需要指出的是,本文暂不考虑2 个弧段完全覆盖的情况(图3),即冗余度函数dj值为2 的测控弧段在多弧段搭接状态下不进行分析。
对于3 个弧段间的相互关系,搭接状态相对比较复杂,其搭接状态可以分为以下4 种。
1)简单搭接1:3 个弧段依据测控开始时刻依次排列,其中弧段1 的跟踪区间与弧段2 的跟踪区间有搭接,属于简单搭接的情况,如图4 所示,弧段3 无任何交叉覆盖。
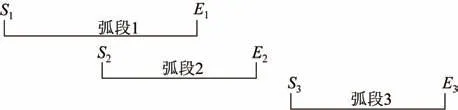
图4 3 个弧段仅其中2 个搭接:简单搭接1Fig.4 Simple overlap 1:only two of the three tracking arcs overlap
2)简单搭接2:如图5 所示,该种弧段搭接情况跟图4 基本类似,只是属于简单搭接的是弧段2 和弧段3,弧段1 无任何交叉覆盖。

图5 3 个弧段仅其中2 个搭接:简单搭接2Fig.5 Simple overlap 2:only two of the three tracking arcs overlap
3)简单搭接3:如图6 所示,3 个弧段依据测控开始时刻进行排列,该情况较为复杂,弧段1 的跟踪区间和弧段2 的跟踪区间、弧段2 的跟踪区间和弧段3 的跟踪区间都有交叉搭接,可视为简单搭接的情况,但弧段1 的跟踪区间和弧段3 的跟踪区间无任何覆盖交叉。

图6 3 个弧段两两搭接:简单搭接3Fig.6 Simple overlap 3:three tracking arcs overlap in pairs
4)3 个弧段交叉搭接:如图7 所示,3 个弧段仍然按照测控开始时刻进行依次排列,该情况最为复杂,任意2 个弧段的跟踪区间有简单搭接的情况,此时,弧段2 可认为是冗余弧段。

图7 3 个弧段交错搭接Fig.7 Staggered overlap of three tracking arcs
为量化评价3 个弧段搭接的情况,假定i<j<k(即Si<Sj<Sk)情况下,定义多弧段冗余度函数dj=h(Ri,Rj,Rk),该函数表示弧段Rj的冗余度,它描述了Ri,Rj,Rk之间的搭接状态。根据图4~7 描述的3 弧段搭接情况,构建弧段Rj的冗余度函数如下:
实际上,dj只有如下2 种取值:
当dj=0 时,可判断弧段Rj属于不搭接的情况,并且不是冗余弧段;当dj=2 时,可判断弧段Ri和Rk属于搭接的情况,同时又完全覆盖弧段Rj,该弧段Rj即是要处理的冗余弧段。
3 冗余弧段的剔除方法
弧段选优的过程便是剔除冗余弧段的过程,如图8 所示。
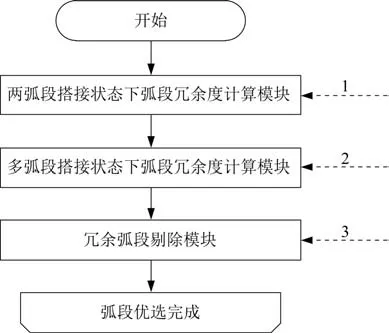
图8 弧段选优方法Fig.8 Flow chart of the preferred tracking arc selection method
该过程可按照如下3 个阶段进行。
1)第1 个阶段:将所有待评价弧段首先按照两弧段搭接冗余度评价函数进行计算,统计出完全被覆盖的弧段情况。如图9 所示,假设i<j,计算任意两弧段Ri和Rj构建的冗余度函数f(Ri,Rj),便可获取弧段Rj的冗余度dj。当dj=2 时,表示弧段Rj便是要剔除的冗余弧段。

图9 两弧段搭接状态下弧段冗余度计算模块Fig.9 Flow chart of calculating the redundant of two overlap tracking arcs
2)第2 个阶段:基于第1 阶段的计算结果,将所有弧段重新按照3 个弧段搭接的冗余度评价函数进行计算,再次标记完全覆盖的弧段。如图10 所示,假设i<j<k,对任意3 个测控弧段Ri,Rj,Rk,计算弧段冗余度函数h(Ri,Rj,Rk),便可获取弧段Rj的冗余度dj,当dj=2 时,表示弧段Rj即是要剔除的冗余弧段。

图10 3 弧段搭接状态下弧段冗余度计算模块Fig.10 Flow chart of calculating the redundant of three overlap tracking arcs
3)第3 个阶段:在前2 个阶段基础上,将所有弧段遍历,将冗余度值为2 的弧段完全剔除,如图11所示。
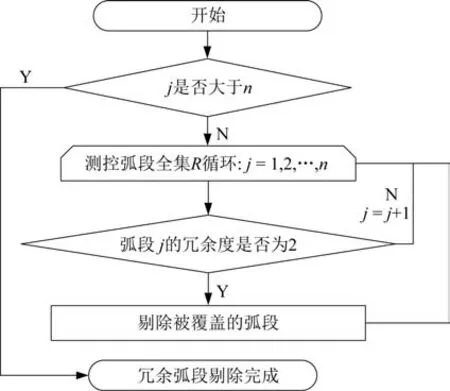
图11 冗余弧段剔除模块Fig.11 Flow chart of deleting the redundant tracking arc
4 实施方法
测控弧段的选优方法如图8~图11 所示。该方法的实施步骤如下。
步骤1首先根据两弧段搭接状态下弧段冗余度评价函数计算每个弧段的冗余度(第1 个弧段不作考虑),对弧段Rj,j=1,2,…,n,循环变量为i=1,2,…,j-1,计算弧段Rj的冗余度函数f(Ri,Rj)值。具体各分支计算方法如下:
1)如弧段Ri的冗余度di=2,并且i≠j-1,则i=i+1,直接选取后续弧段进行判断;
2)如弧段Rj的冗余度dj≠2,而且i≠j-1,则i=i+1,直接选取后续弧段进行判断;
3)如弧段Rj的冗余度dj=2,则j=j+1,计算后续弧段冗余度;
4)结束判断的条件为弧段Rj是弧段集合R的最后一个。
步骤2按照多弧段搭接状态下弧段冗余度评价函数计算多弧段间的冗余度(首尾弧段不作考虑),对弧段Rj,j=1,2,…,n,循环变量为i=1,2,…,j-1,k=j+1,2,…,n,计算弧段Rj的冗余度函数h(Ri,Rj,Rk)值。具体各分支计算方法如下:
1)如弧段Ri的冗余度di=2,并且i≠j-1,则i=i+1,直接选取后续弧段进行判断;
2)如弧段Rk的冗余度值dk=2,而且k≠n,则k=k+1,直接选取后续弧段进行判断;
3)如弧段Rj的冗余度dj≠2,且i≠j-1,则i=i+1,直接选取后续弧段进行判断;
4)如弧段Rj的冗余度dj≠2,且k≠n,则k=k+1,直接选取后续弧段进行判断;
5)如弧段Rj的冗余度dj=2,则j=j+1,计算后续弧段冗余度;
6)结束判断的条件:弧段Rj是弧段集合R的最后一个。
步骤3根据各弧段冗余度函数值,将完全覆盖的弧段剔除。对于全集R中的每个弧段Rj,j=1,2,…,n,如出现冗余度dj=2 的弧段,便将该弧段剔除;否则j=j+1,继续进行判断。
5 结束语
本文立足航天任务中天地基测控资源的实际需求,设计实现了基于冗余度函数的跟踪弧段处理方法,该方法通过合理配置测控资源,能够有效剔除冗余弧段,提高了现有测控资源的使用效率。另外,对只有部分搭接的弧段本文暂未处理,如何合理分配该情况下的测控资源以及上下行通信链路,将是后续研究的重点工作。
猜你喜欢
机械工程师(2023年9期)2023-09-15 09:14:48
电子设计工程(2022年24期)2022-12-23 12:03:28
光学精密工程(2021年8期)2021-10-04 11:46:28
电子测试(2018年22期)2018-12-19 05:12:58
山西建筑(2017年29期)2017-11-15 02:04:38
黑龙江交通科技(2017年7期)2017-09-20 03:40:35
黑龙江交通科技(2017年10期)2017-03-01 06:12:07
山东工业技术(2016年15期)2016-12-01 05:31:42
太空探索(2016年12期)2016-07-18 11:13:43
黑龙江交通科技(2016年11期)2016-03-11 08:46:57