基于自校正PID控制的智能悬臂梁振动控制
2019-04-23 08:47胡晓琳
噪声与振动控制 2019年2期
胡晓琳,张 婷
(上海工程技术大学 机械与汽车工程学院,上海201620)
近年来,压电传感器和致动器结合的智能悬臂梁系统引起了许多研究者的关注[1],同时基于智能系统振动控制的控制器设计也引起了学者们广泛的关注[2];特别地出现了大量关于应用压电材料抑制智能悬臂梁系统振动的控制器设计[3–4]。Zhu 等[5]提出了采用自适应前馈控制方法对压电智能悬臂梁进行主动振动抑制;Zhang等[6]将自适应极点配置控制理论应用到在热环境下的智能悬臂梁的振动控制中。但将传感与致动一体化的压电材料应用于悬臂梁系统的研究不多。而且,目前许多研究人员致力于通过各种控制方法控制智能悬臂梁的振动,Koofigar等[7]提出了采用自适应控制方法对模型不确定性和环境扰动的智能结构进行振动抑制;Zhang等[8]实现了时滞智能梁迟滞模型的构建,并且采用自适应振动抑制方法实现了其在控制系统中的应用;但应用压电双晶片进行系统参数辨识实现实时振动控制的设计并不多见。
鉴于目前研究现状,本文通过假设模态法和哈密顿原理建立了智能悬臂梁的动力学模型[9];再基于智能悬臂梁的动力学模型,采用自校正PID控制[10–12]和普通PID 控制,实现智能悬臂梁的自由振动控制的理论仿真与实验验证。因此,为使智能悬臂梁自由振动得到有效控制,本文基于压电双晶片的致动与传感一体化特性,通过采用自校正PID 控制方法与基于Neigler-Nicholes参数整定法的普通PID控制方法,得到智能悬臂梁主动控制的数值仿真与实验结果,再对此2种控制方法的控制结果进行对比,得出了自校正PID控制的效果更为显著和更为有效的结论。
1 智能悬臂梁系统
1.1 压电双晶片
如图1 所示为压电双晶片实物图,压电双晶片的构造层为三层,其中,中间层为电极片,上下层均为压电晶片,电极片和压电晶片之间通过胶粘方式联接[13]。
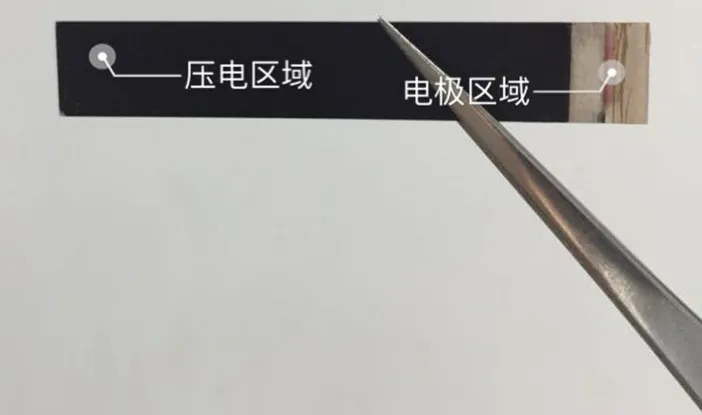
图1 压电双晶片实物图
如图2 所示为压电双晶片结构简图,左侧为固定端,右侧为自由端,当上层为驱动层,下层为传感层时,对驱动层施加一电压,它的自由端可弯曲产生位移,位移的幅度和方向与施加的压电具有函数关系;此时下层会因为上层的驱动力而发生纵向变形,即传感层会输出传感电压。
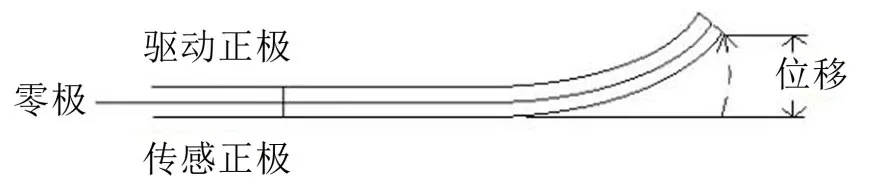
图2 压电双晶片简图
压电双晶片相对于其他压电材料的优势在于它输出位移大,反应速度快,适合惯性冲击精密驱动场合;并且将传感与致动两个功能结合在一起,从而减少了元件的数量。
1.2 智能悬臂梁结构
根据前人[14]的研究,对于1 阶模态振动,当压电片的位置越靠近固定端,振动衰减速度越快;对于2阶模态振动,当压电双晶片处于距悬臂梁中部某一位置时,具有较好的综合控制性能,若同时考虑1、2阶模态的控制时,压电片位于悬臂梁固定端或中部某一位置时,具有相近且较好的控制性能,通过实验亦可验证:当压电片处于智能悬臂梁中间偏左处时控制效果更好。如图3 所示为智能悬臂梁结构图,当智能悬臂梁右侧的自由端受到外部扰动时,利用压电双晶片的驱动特性控制悬臂梁自由振动,同时利用压电双晶片的传感特性获取相应位置的输出位移,从而实现智能悬臂梁振动控制闭环回路。

图3 智能悬臂梁
2 智能系统的动态模型
2.1 智能悬臂梁动力学模型
本文所研究的对象为理想的均匀悬臂梁,沿梁长度x方向变化的抗弯刚度为EI(x) ,梁的质量密度为ρ,单位长度质量为m(x) ,作用在梁上的横向荷载为P(x,t),梁的横向位移(挠度)w(x,t)为随坐标x和时间t连续变换的函数。
本智能悬臂梁系统的方程[15]如下

式中:CP为压电片电容,单位法拉;
EP为压电传感器的弹性模量;
b为悬臂梁的宽度;
tb为悬臂梁的厚度;
e31为压电系数;
w为柔性臂的挠度(臂的横向位移)。
但是此系统致动方程为1 阶偏微分形式,被控制量w(挠度)既是时间的函数,同时又是空间的函数,对此,采用正交模态变换,将偏微分方程形式转换成一组2阶微分方程形式,从而便于设计控制器。
对于单自由度智能悬臂梁系统而言

式中:w(x,t)是体系的几何位移坐标;
ϕ(x)是第n阶振型的振型函数;
q(x)是第n阶振型的广义坐标,也称振型坐标。
传感方程的模态变换如下,将式(2)代入压电传感方程式可得


致动方程的模态变换如下,当取ϕ(x)为正则振型,Mi=1,所以,梁的振动微分方程为

本小节对粘贴有压电双晶片的智能悬臂梁建模问题进行了研究,采用模态分析方法,利用模态振型正交性,将系统的偏微分方程形式转换为一组2 阶微分方程形式。动力学模型是控制系统的对象,所建模型为之后的控制器的设计奠定了基础。
2.2 智能悬臂梁的状态空间描述
状态空间描述,是现代控制理论的基本出发点。将式(4)描述的压电双晶片智能悬臂梁用矩阵的形式表示为

式中:ψ11=ϕ'1(x2)-ϕ'1(x1)
取此系统状态为

输入为

则整个闭环系统的描述为

即

取60

3 控制器的设计
3.1 自校正PID控制器设计
3.1.1 系统参数辨识
最小二乘法由于具有原理简明、收敛较快、易于理解、易于编程实现等特点,在系统参数估计中应用广泛。本文采用递推最小二乘法[16]解决对象参数在线实时估计的问题。

已知:na、nb和d。
(2)采样当前输出y(k)和输入u(k);
(4)k →k+1,返回第2步,继续循环。
由递推最小二乘法系统参数辨识,获取自校正PID控制器所需的参数a和b。
3.1.2 自校正PID控制器设计
本文采用自校正PID控制抑制智能悬臂梁的自由振动。其主要思想是寻求一个反馈控制率,使得闭环传递函数的极点位于期望的位置上。图4所示为间接自校正PID 控制的系统结构,通过在线实时辨识得到系统参数,再根据自校正PID 控制的参数变化来实现期望的输出,以提高系统的稳定性、响应速度和控制精度。
以下为自校正PID控制器[16]的设计过程。

设被控对象为

式中:u(k)和y(k)表示系统的输入和输出,e(k)为外部扰动,d⩾1为纯延时,且

对式(13)所示系统采用PID控制,为消除常值干扰,控制器必须有积分作用,此时,对应的PID 控制器可表示为

式中

且

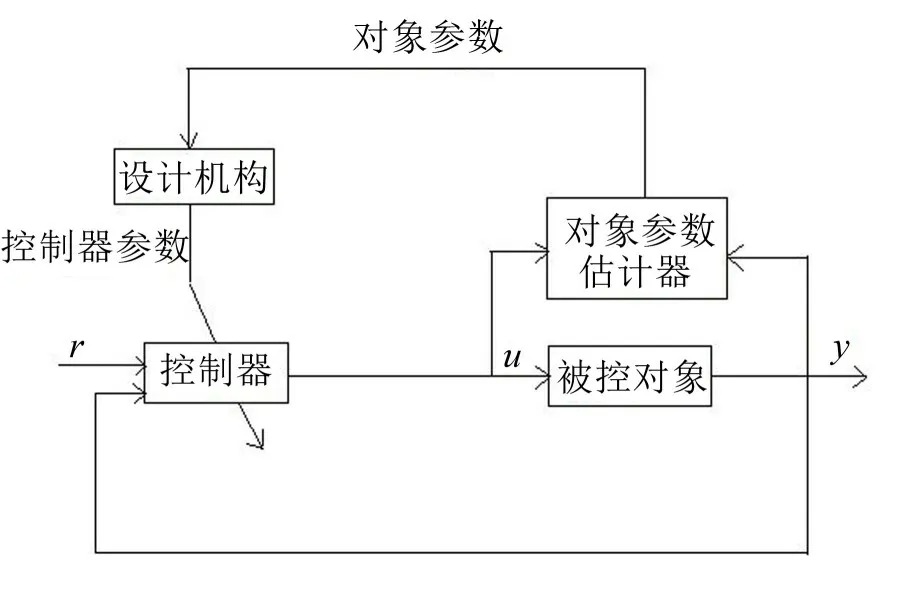
图4 间接自校正PID控制
将式(14)代入式(13)得闭环系统输出为

令闭环特征多项式为期望传递函数分母多项式,即
式中:对于Am的选择仍需满足极点配置控制(PPC)中相应的相容性条件。
结合式(15),上式又可表示成

为保证式(18)有唯一解,令ΔAF和z-dBG的阶次相同(已知degΔA=3、degG=2),且等式右边阶次小于左边阶次,即各多项式的阶次需满足下列关系:

则Diophantine 方程式(18)中多项式F、G 可用MATLAB函数diophantine.m进行求解。
3.2 普通PID控制器设计
为了与自校正PID 控制效果对比,本文还采用了Ziegler-Nichols参数整定方法[17]确定比例增益KP、积分时间TI、微分时间TD这3 个参数,以实现普通PID控制器的设计。
通过实验方法,根据阶跃响应信号可近似确定参数K(静态放大系数)、L(容量滞后时间)和T(时间常数),然后再根据表1 确定普通PID 控制器的有关参数。

表1 齐格勒-尼柯尔斯调整法则
4 仿真和实验验证
4.1 仿真验证
基于自校正PID 控制和普通PID 控制理论,本文应用MATLAB/SIMULINK 对智能悬臂梁实现振动控制的理论仿真与分析。
图5所示为普通PID控制框图:基于智能悬臂梁动力学模型,应用Ziegler-Nichols 参数整定方法,得出了普通PID 控制器参数,其中包含比例增益KP=20.00,积分时间TI=2×10-6,微分时间TD=5×10-7。

图5 普通PID控制之SIMULINK控制模块图
图6为自校正PID控制框图:针对智能悬臂梁动力学模型,应用MATLAB/simulink 的function 模块编程功能,采用自校正PID控制方法,实现智能悬臂梁的振动控制研究。

图6 自校正PID控制之SIMULINK控制模块图
图7(a)为仿真中普通PID控制下的控制电压随时间变化的结果图,图7(b)为该控制下系统的输出位移与未控制下的自由振动位移随时间变化的结果对比图。由图可知,其仿真中控制效果并不明显。
图8(a)为仿真中自校正PID控制下的控制电压随时间变化的结果图,图8(b)为该控制下系统的输出位移与未控制下的自由振动位移随时间变化的结果对比图。仿真中的控制效果较明显,与普通PID控制的仿真结果相比,自校正PID 控制能够更明显且更有效地控制智能悬臂梁。
4.2 实验验证
合编程软件环境下的自校正PID 控制器或普通PID控制器进行处理,把得到的0~10 V 控制电压传输到数据采集卡,之后通过HPV系列压电陶瓷驱动电源放大15倍后产生相应的抑制力,加载到压电双晶片,实现对悬臂梁的振动抑制。
首先,为了减少实验误差,在进行实物实验之前,对实验设备进行检查和调试,即检查设备是否可以正常运行,调试各个设备输出与输入的情况,观察是否可达到实验所要求的标准。其次,运行由labVIEW和MATLAB混合编程软件;然后给智能悬臂梁施加一组干扰并观察其相关曲线的运行轨迹;最后收集实验数据,并对数据进行处理和分析,得出结论。
图10(a)为实验中普通PID 控制下的控制电压随时间变化的结果图,图10(b)为该控制下系统的输出电压与控制前自由振动的输出电压的结果对比图,实验结果表明其控制效果并不明显;图11(a)为实验中自校正PID控制下的控制电压随时间变化的结果图,图11(b)为该控制下系统的输出电压与控制前的自由振动的输出电压的对比图,结果表明,在系统运行初期,系统需要一定时间进行估计参数,故存在较大幅度的振荡;一段时间之后,该系统具有较好的控制效果,在0.8 s 后,输出电压的幅值均减小到较小值,与无控制的自由振动相比,实验中的控制效果较明显,由此可知自校正PID 控制方法具有较好的输入跟踪能力和自适应能力,与普通PID 控制相比,自校正PID控制在抑制自由振动方面更为有效。
图9 所示为智能悬臂梁振动控制系统实验平台,由HPV 系列压电陶瓷驱动电源、MCC-USB 1808X 以及装有labVIEW 和MATLAB 的电脑组成。利用labVIEW、MATLAB 混合编程技术,采用MATLAB语言编写相应的控制程序,构成实验软件系统。labVIEW所搭配的控制器用于实现对振动信号的分析和处理。HPV系列压电陶瓷驱动电源是一种为压电陶瓷致动器设计开发的高品质驱动电源,能够为压电陶瓷提供高稳定性、高分辨率的电压,并且有优良的频率响应和极低的静态纹波。信号的传输与转换采用数据采集卡,MCC-USB 1808X数据采集器提供18位高分辨率同步模拟输入通道,同时具有数字I/O和计数器功能,其体积小,缩减了实物实验空间;本身便捷的USB 连接方式,使操作便捷且高速,削减了成本,缩短了时间,提高了实验效率;同时自身的高速传输与转换速度较快的特性保证了振动信号处理的及时性。
当悬臂梁的自由端受到干扰后,压电双晶片采集应变,传感信号经MCC-USB 1808X 数据采集卡转换处理后,传至电脑,由labVIEW 和MATLAB 混
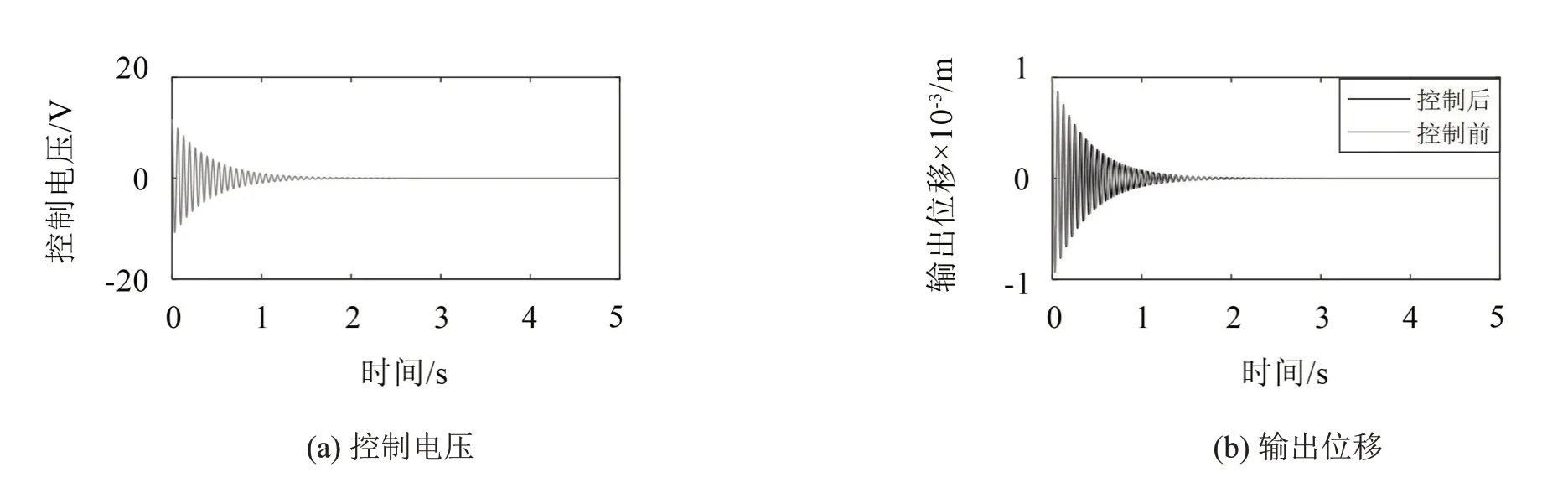
图7 普通PID控制之控制电压和控制后与控制前输出位移对比(仿真)

图8 自校正PID控制之控制电压和控制后与控制前输出位移对比(仿真)

图9 实验平台
5 结语
本文通过应用假设模态法和Hamilton原理构建智能悬臂梁的动力学模型;再基于智能悬臂梁的动力学模型,采用自校正PID控制和普通PID控制,实现了智能悬臂梁的自由振动控制理论仿真与实验验证。然后通过SIMULINK 和实验平台,分别得到了采用压电双晶片的智能悬臂梁主动控制的数值仿真与实验结果,再对此两种控制方法的控制结果进行对比,得出了自校正PID 控制的效果更为显著的结论。这为基于自校正PID 的控制方法,采用压电双晶片对智能结构吸振减振提供了理论与实验研究的基础。

图10 普通PID控制之控制电压和控制后与控制前输出位移对比(实验)
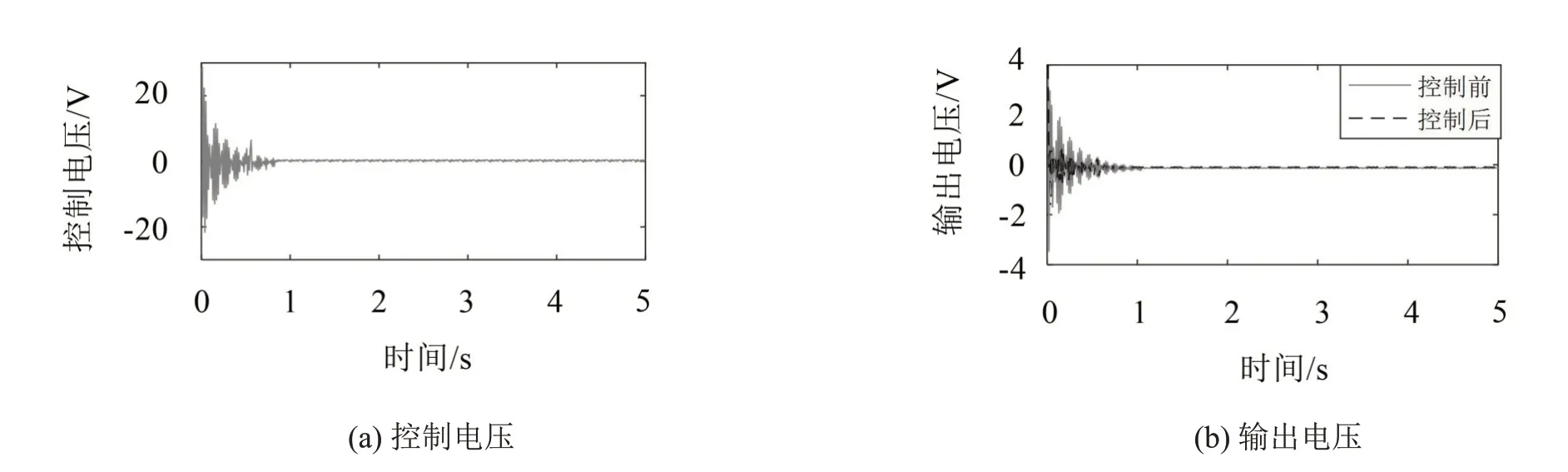
图11 自校正PID控制之控制电压和控制后与控制前输出位移对比(实验)
猜你喜欢
仪表技术与传感器(2022年4期)2022-05-31
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2021年3期)2021-07-22
陶瓷学报(2020年6期)2021-01-26
国学(2020年1期)2020-06-29
海洋工程装备与技术(2020年6期)2020-03-09
中国医学影像学杂志(2018年9期)2018-10-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
航天器环境工程(2011年4期)2011-06-08