吊篮式移栽机构工作参数优化与试验
2018-05-09 12:39:22毛罕平李亚雄
江苏大学学报(自然科学版) 2018年3期
刘 洋, 毛罕平, 李亚雄, 李 斌, 王 涛
(1. 江苏大学 现代农业装备与技术教育部重点实验室, 江苏 镇江 212013; 2. 江苏大学 江苏省农业装备与智能化高技术研究重点实验室, 江苏 镇江 212013; 3. 新疆农垦科学院 机械装备研究所, 新疆 石河子 832000)
吊篮式移栽机可以满足作物铺膜移栽种植的要求,在新疆加工番茄移栽种植过程中得到了应用[1-2].吊篮式移栽机构上的辅助喂苗装置在向栽植器喂苗时,存在番茄穴盘苗不能可靠进入栽植器内部和苗钵质量损失较大的问题[3-4].一些学者已经对移栽时作物幼苗的投苗运动进行了研究,文献[5]将穴盘苗定义为一个质点,认为穴盘苗与导苗管碰撞后会沿着壁面下滑.文献[6]研究了水稻穴盘苗在导苗管中的下滑速度和距离之间的关系.文献[7]利用高速摄像观测穴盘苗在导苗管中的运动,得出穴盘苗一边沿壁面滑动,一边绕与壁面接触的点翻转至与壁面接触.文献[8]根据源盘和目标盘的位置规划取苗路径,将蔬菜穴盘苗从高密度穴盘移栽到低密度穴盘.文献[9]设计了一种门架摆杆式取苗机构,可以实现缓慢取苗,快速投苗,将苗投入固定的导苗装置中.这些研究都是将苗投落到固定不动的导苗装置或穴盘中.对于吊篮式移栽机,栽植器相对机架运动,穴盘苗在栽植器中的运动复杂.番茄穴盘苗的苗茎具有韧性[10],不能忽略苗茎与栽植器碰撞对运动速度的影响,而且番茄穴盘苗在被辅助喂苗装置投落时,下落的姿态具有随机性[11],会使番茄穴盘苗的不同部位与栽植器碰撞,导致碰撞后番茄穴盘苗的运动速度和姿态发生改变.这些现象都会影响移栽机构的喂苗准确率和苗钵质量的损失.
针对此问题,文中对番茄穴盘苗与栽植器的碰撞进行接触力学分析和高速摄像试验,找到影响喂苗准确率和苗钵质量损失的主要因素,通过正交试验和田间移栽试验优化工作参数,达到提高喂苗准确率和降低苗钵质量损失的目的.
1 接触力学分析
番茄穴盘苗被投苗杯投落后做自由落体运动,落入绕定轴匀速转动的栽植器中.在此过程中,番茄穴盘苗与栽植器发生碰撞,如图1所示.
碰撞前,番茄穴盘苗的角速度和水平方向速度都为0,在垂直方向的速度uY为
(1)
式中:H是垂直方向上处于投苗状态的投苗杯到栽
植器转动轴的距离;R是栽植器的转动半径;θ是处于接苗状态的栽植器转动半径与水平面之间的夹角,即接苗角.

图1 吊篮式移栽机构结构简图和碰撞运动示意图
栽植器做匀速圆周运动,其速度uE为
uE=ωR,
(2)
式中ω是栽植器的角速度.
因为碰撞时间很短,忽略苗钵与栽植器的摩擦力[12-13],苗钵与栽植器的碰撞方向垂直于栽植器壁面.碰撞方向的相对运动速度uN为

(3)
将苗钵与栽植器的碰撞瞬时定义为柔性球体与刚性平面的接触,由赫兹理论可知[14],接触方向上的力F为
(4)

由牛顿第二定理可得
(5)
式中:u1,u2为栽植器和番茄穴盘苗在碰撞方向的速度;M,m分别为栽植器和番茄穴盘苗的质量.
由式(5)可得
(6)
整理式(6)可得
(7)
由式(4)和(7)可得
(8)
对式(8)进行积分可得
(9)
(10)
将式(3)代入式(10),可以得到ω和θ与δmax的关系:
δmax=
对式(11)中的各参数赋值[15-16]:H为490 mm,R为240 mm,β为20°,E1为3.0×106Pa,E2为2.1×1011Pa,γ1为0.44,γ2为0.31,M为1 000 g,m为14.7 g,r为16.7 mm,可以得到角速度ω和接苗角θ对苗钵最大变形量δmax的影响曲面,如图2所示.在图中可以看到,当角速度ω取较小值时,最大变相量δmax随着接苗角θ的增大而减小,但是当角速度ω取较大值时,最大变相量δmax的变化相反;当接苗角θ固定在较小值时,随着ω的增加,最大变相量δmax变化很小;当接苗角θ固定在较大值时,最大变相量δmax随着ω的增加而增大.

图2 ω和θ对δmax的影响曲面
受劳动强度限制,人工投苗的频率为45~50株·min-1,移栽机构上一般安装5个栽植器(图1),此时栽植器转动的角速度ω为0.91~1.05 rad·s-1.计算可得,当ω为0.91 rad·s-1时,随着θ的增加,δmax从2.47 mm减小到1.53 mm;当ω为1.05 rad·s-1时,δmax从1.58 mm增大到2.41 mm.角速度ω和接苗角θ对δmax有影响,而δmax直接关系到苗钵的质量损失.因此,栽植器的角速度ω和接苗角θ是影响苗钵质量损失的主要因素.
2 碰撞运动分析
番茄穴盘苗与栽植器的碰撞运动复杂,进一步利用高速摄像观察番茄穴盘苗与栽植器的碰撞运动,找到影响苗钵质量损失和喂苗准确率的因素.
2.1 试验材料与方法
番茄穴盘苗用128孔穴盘育苗,育苗基质由草炭、蛭石和珍珠岩混合制成,1.2倍穴盘孔体积装盘[10].试验时苗龄45 d[17],株高12~20 cm,苗钵含水率50%~55%.
试验设备为吊篮式移栽机构试验台和高速摄像机(型号TS3-100L,美国FASTEC)如图3所示.试验台架上调速电机和齿轮箱通过链条驱动移栽机构转动,可以通过调整调速电机的转速来改变栽植器的转动速度,水平移动调位板可以改变栽植器的接苗角.试验时高速摄像机图片采集速度设定为500幅·s-1[18],移栽频率为50株·min-1,接苗角为40°.

图3 移栽机构试验台
2.2 试验结果与分析
为了全面地研究番茄穴盘苗与栽植器的碰撞运动,选择具有代表性的苗钵和苗茎与栽植器碰撞进行观察分析.
苗钵与栽植器内壁面的碰撞运动如图4所示.0.012 s时苗钵与栽植器碰撞,碰撞后番茄穴盘苗相对栽植器转动方向向前运动,0.024 s时可以看到苗钵上有育苗基质散落(红色圈中是散落的育苗基质),在0.036 s苗茎与栽植器接触后,番茄穴盘苗向下运动,0.060 s时下落到栽植器底部,番茄穴盘苗相对栽植器的运动停止.

图4 苗钵与栽植器落苗口边缘碰撞
苗茎与栽植器的碰撞运动如图5所示.在0.038 s时苗茎与栽植器碰撞,碰撞后番茄穴盘苗转动的同时向下运动,0.058 s时番茄穴盘苗下落到栽植底部,碰撞运动结束.
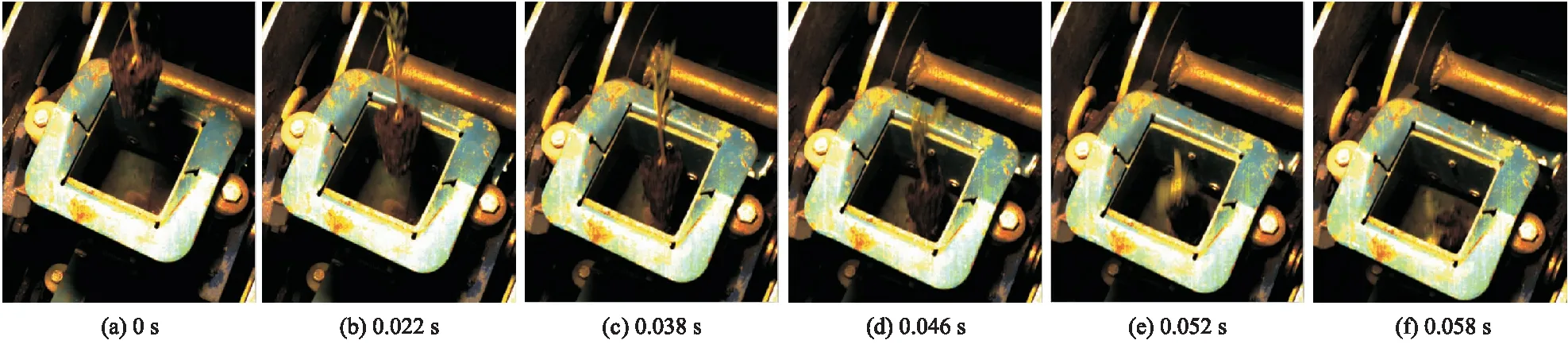
图5 苗茎与栽植器碰撞
苗钵与栽植器落苗口边缘的碰撞运动如图6所示.0.020 s时苗钵与栽植器落苗口边缘碰撞,碰撞后番茄穴盘苗以苗钵为转动中心向栽植器外侧转动,0.044 s时苗钵上有育苗基质散落(红色圈中是散落的育苗基质),到0.074 s时可以看到番茄穴盘苗已转动到栽植器外侧,喂苗失败.

图6 苗钵与栽植器落苗口边缘碰撞
通过观察番茄穴盘苗与栽植器的碰撞运动可以发现,苗钵与栽植器的碰撞是导致苗钵质量损失的主要原因,苗茎与栽植器碰撞可以避免苗钵质量发生损失.苗钵和苗茎与栽植器碰撞后,番茄穴盘苗的运动速度和姿态都发生改变.在前2种碰撞情况下,番茄穴盘苗与栽植器直接碰撞后,都发生了第2次碰撞.由接触力学分析可知,第2次碰撞时苗钵也会发生变形和质量损失.由第2种碰撞情况可以看出,碰撞点的位置会影响喂苗准确率.
在投苗杯内径一定的条件下,不同株高的番茄穴盘苗从投苗杯中下落时倾斜角不同,会使番茄穴盘苗的不同部位与栽植器发生碰撞.株高的变化会改变番茄穴盘苗质心的位置,这也会影响碰撞后番茄穴盘苗的运动速度和姿态.因此,番茄穴盘苗的株高也是影响喂苗准确率和苗钵质量损失的因素.
3 正交试验与工作参数优化
3.1 试验因素和水平的选择
通过接触力学分析和高速摄像试验可知,栽植器角速度、接苗角和番茄穴盘苗株高是影响喂苗准确率和苗钵质量损失的主要因素.为了得到最优工作参数,分别在移栽频率为45和50株·min-1时进行正交试验.
吊篮式移栽机构上,栽植器的接苗角θ的范围为0°≤θ≤90°,试验时接苗角取40°,60°和80°.加工番茄穴盘苗移栽时株高普遍为12~20 cm,试验时株高取12,16和20 cm.各试验因素的水平见表1,试验用番茄穴盘苗和移栽机构台架与第2节相同.

表1 试验因素与水平
3.2 试验结果与分析
选用正交表L9(34)安排试验,每组试验重复3次,每次试验喂苗200株.以喂苗准确率Q和苗钵破损率P为试验指标,计算公式为

(12)

(13)
式中:N是喂苗数量;S是没有进入栽植器内部的番茄穴盘苗数量;M1是每次试验前所有番茄穴盘苗的质量;M2是每次试验后所有番茄穴盘苗的质量.
试验时有2个指标需要评价,文中采用综合评分法来确定最优方案[19].对喂苗准确率和苗钵破损率进行量纲一化处理.
达到最大化的喂苗准确率量纲一化方程为
(14)
式中:Q*是各组试验喂苗准确率的量纲一化值;Qmax是各组试验中喂苗准确率的最大值;Qmin是各组试验中喂苗准确率的最小值;Q0是各组试验喂苗准确率的试验值.
达到最小化的苗钵破损率量纲一化方程为
(15)
式中:P*是各组试验苗钵破损率的量纲一化值;Pmax是各组试验中苗钵破损率的最大值;Pmin是各组试验中苗钵破损率的最小值;P0是各组试验苗钵破损率的试验值.
移栽时,需要在保证喂苗准确率的条件下,降低苗钵破损率,取它们的权重系数分别为0.65和0.35.综合评分值K为
K=(0.65Q*+0.35P*)×100.
(16)
正交试验结果如表2,3所示.

表2 移栽频率45株·min-1时试验结果

表3 移栽频率50株·min-1时试验结果
由表2可以看出,移栽频率为45株·min-1时,试验号为5,6和9的工作参数为较优组合.由表3可以看出,移栽频率为50株·min-1时,试验号为5,6和7的工作参数为较优组合.这时接苗角为60°和80°,番茄穴盘苗株高为12和16 cm.2种移栽频率下,各因素对2个试验指标敏感性由大到小为接苗角和番茄穴盘苗株高.
4 田间移栽试验
为了进一步验证综合评分优选得到的6组工作参数的实际工作效果,进行田间移栽试验.
4.1 试验装置和方案
试验用设备为吊篮式移栽机(图7a)[20],试验地点在新疆兵团第二师27团,育苗基质由草炭、蛭石和营养土组成,试验时苗龄48 d(图7b).试验前田间已铺设地膜,土壤干燥.
田间试验共进行6组,分别是移栽频率为45和50株·min-1时综合评分K值较高的3组工作参数.每组试验重复3次,每次试验移栽200株番茄穴盘苗.

图7 吊篮式移栽机与试验用番茄穴盘苗
4.2 试验结果
试验结果见表4,由表可以看出田间试验中各组试验的喂苗准确率都低于正交试验的结果,这是因为试验用地受整地质量的影响,一些区域耕层较浅,栽植器入土时接触到耕层下较硬的土壤,将移栽机构顶起发生振动,导致喂苗准确率降低.还可以看到,苗钵破损率小于正交试验的结果,这是因为苗钵中的水分使栽植器内壁面粘黏土壤[21],降低了苗钵与栽植器碰撞时的变形量.总体看来,田间试验与台架试验结果基本一致,田间移栽生产作业时,移栽频率并不是始终不变,会在45~50株·min-1之间变动,由田间试验的结果可以看出,接苗角取60°,番茄穴盘苗株高小于16 cm,有利于提高喂苗准确率和降低苗钵质量损失.

表4 田间移栽试验参数和结果
5 结 论
1) 用接触力学研究碰撞时苗钵最大变形量与栽植器工作参数之间的关系,并用高速摄像观察番茄穴盘苗与栽植器的碰撞运动,得出栽植器角速度、接苗角和番茄穴盘苗株高是影响喂苗准确率和苗钵质量损失的主要因素.
2) 在移栽频率为45和50株·min-1时,以接苗角和番茄穴盘苗株高为因素,进行正交试验,并用综合评分法对喂苗准确率和苗钵破损率进行评价,得出接苗角取60°和80°,番茄穴盘苗株高取12和16 cm时,综合评分的分值较高.
3) 用综合评分分值较高的6组试验进行田间移栽试验,试验结果与正交试验基本一致,得出移栽频率为45~50株·min-1时,接苗角取60°,番茄穴盘苗株高小于16 cm,有利于提高喂苗准确率和降低苗钵质量损失.
参考文献(References)
[ 1 ] LIU C A,LI F R,ZHOU L M,et al. Effects of water management with plastic film in a semi-arid agricultural system on available soil carbon fractions[J].European Journal of Soil Biology,2013,57:9-12.
[ 2 ] 张振国,吕全贵,陈青云,等. 盆栽花卉移栽机取苗机构的现状分析[J]. 江苏大学学报(自然科学版),2016,37(4):409-417.
ZHANG Z G,LYU Q G,CHEN Q Y,et al. Status analysis of picking seedling transplanting mechanism automa-tic mechanism for potted flower[J]. Journal of Jiangsu University(Natural Science Edition), 2016,37(4):409-417.(in Chinese)
[ 3 ] MAO H,HAN L,HU J,et al. Development of a pin-cette-type pick-up device for automatic transplanting of greenhouse seedlings[J]. Transactions of the ASABE,2014,30(4):547-556.
[ 4 ] CHOI W C,KIM D C,YUI K R,et al. Development of a seedling pick-up device for vegetable transplanters[J].Transaction of the ASAE,2002,45(1):13-19.
[ 5 ] 孙裕晶,马成林,左春柽. 组合振动式导苗机构试验研究[J]. 农业机械学报,2001,32(6):30-33.
SUN Y J, MA C L, ZUO C C. Experimental investigation on combined guiding device with vibration[J]. Transactions of the CSAM,2001,32(6):30-33. (in Chinese)
[ 6 ] 宋建农,王苹,王清旭. 导管式水稻分秧栽植机构的秧苗运动分析及参数优化[J]. 中国农业大学学报,2004,9(1):71-74.
SONG J N,WANG P,WANG Q X. Movement analysis of seedlings and parameter optimization of the set of distributing and transplanting seedlings with channel pipe[J]. Journal of China Agricultural University,2004,9(1):71-74. (in Chinese)
[ 7 ] 张国凤,赵匀,陈建能. 水稻钵苗在空中和导苗管上的运动特性分析[J]. 浙江大学学报(工学版),2009,43(3):529-534.
ZHANG G F,ZHAO Y,CHEN J N. Characteristic ana-lysis of rice plotted-seedlingps motion in air and on turbination-type guide-canal[J]. Journal of Zhejiang University(Engineering Science),2009,43(3):529-534. (in Chinese)
[ 8 ] RYU K H, KIM G,HAN J S. Development of a robotic transplanter for bedding plants[J]. J Agric Engng Res,2001,78(2):141-146.
[ 9 ] HAN L H,MAO H P,HU J P. Development of a doorframe-typed swinging seedling pick-up device for automatic field transplantation[J]. Spanish Journal of Agricultural Research,2015, 13(2):1-14.
[10] KUMI F, MAO H,LI Q,et al. Assessment of tomato seedling substrate-root quality using X-ray computed tomography and scanning electron microscopy[J]. Applied Engineering in Agriculture,2016,32(3):1-11.
[11] JIN X,PANG J,JI J T,et al. Experiment and simulation analysis on high-speed up-film transplanting mechanism[J]. International Agricultural Engineering Journal,2017,26(3):105-112.
[12] HIBBELER R C. Statics and Dynamics[M]. New Jersey,Amercia:Pearson Prentice Hall,2016.
[13] 腾振超,赵添佳. 十字形柱的力学性能分析[J].重庆理工大学学报(自然科学),2017,31(6):78-83.
TENG Z C,ZHAO T J. Analysis of mechanical properties of cross-shaped section columns[J]. Journal of Chongqing University of Technology(Natural Science),2017,31(6):78-83. (in Chinese)
[14] VALENTIN L P. Contact Mechanics and Fricion Physical Principles and Applicatin[M].Heidelberg:Springner Verlag,2010.
[15] JIN X,DU X U,JI J T,et al. Physical characteristics of plug seedling transplanted by the return-blank type transplanter[J]. International Agricultural Engineering Journal,2015,24(4):1-10.
[16] LIU J D,CAO W B,TIAN D Y,et al. Kinematic analysis and experiment of planetary five-bar planting mechanism for zero-speed transplanting on mulch film[J]. Int J Agric & Biol Eng,2016,9(4):84-91.
[17] 周静,李萍萍,王纪章,等. 立体栽培条件下光温环境对生菜生长和生理特征影响[J]. 江苏大学学报(自然科学版),2016,37(5):530-535.
ZHOU J,LI P P,WANG J Z,et al. Effects of lights and temperature on growth and development of lettuce in stereoscopic cultivation[J]. Journal of Jiangsu University(Natural Science Edition), 2016,37(5):530-535.(in Chinese)
[18] LI J H,XIA Y,WANG W,et al. Dipping process cha-racteristics based on image processing of pictures captured by high-speed cameras[J]. Nano-Micro Lett,2015,7(8):1-11.
[19] 陈立周. 机械优化设计方法[M]. 北京:冶金工业出版社,2003.
[20] 刘洋,李亚雄,李斌,等. 膜上移栽机关键部件的设计与试验研究[J]. 干旱地区农业研究,2013,31(1):231-235.
LIU Y,LI Y X,LI B,et al. Design and testing of key components in above-film transplanter[J]. Agricultural Research in the Arid Areas,2013,31(1):231-235. (in Chinese)
[21] 任露泉. 土壤粘附力学[M]. 北京:机械工业出版社,2011.
猜你喜欢
园艺与种苗(2023年7期)2023-08-11 04:52:24
当代水产(2023年2期)2023-05-19 08:22:28
当代水产(2023年2期)2023-05-19 08:22:18
中国农业大学学报(2021年9期)2021-11-09 10:47:50
当代水产(2021年4期)2021-07-20 08:10:46
运输经理世界(2021年2期)2021-03-06 11:56:53
当代水产(2020年4期)2020-06-16 03:22:44
山东林业科技(2019年2期)2019-06-03 10:11:08
四川水泥(2019年7期)2019-02-17 13:09:22
新疆农垦科技(2018年3期)2018-04-24 08:17:28