
三轴车悬架动力学参数的匹配
2018-05-09 12:39孙艺珊吴志成
江苏大学学报(自然科学版) 2018年3期
孙艺珊, 吴志成
(北京理工大学 机械与车辆学院, 北京 100081)
多轴车辆是比小型汽车更为复杂的多质量振动系统.多轴车辆在行驶时,车身振动,会影响驾驶员的舒适感,不利于提高工作效能.而且多轴车辆自身载质量大,随着多轴车辆车速的不断提高,振动很大时,车辆的动载荷增大,缩短了多轴车辆的使用寿命,同时也加大了对路面的破坏.多轴车辆的工作条件恶劣,行驶道路坡路弯道多、转弯半径小,长期处于振动与冲击载荷下工作,驾驶员易疲劳,容易发生交通事故.此外,多轴车辆行驶平顺性对车辆的油耗与车体损伤也有重要影响.所以提高多轴车行驶平顺性具有十分重要的现实意义.
文献[1]分析了三轴车辆、二轴车辆和四轴军车的行驶平顺性与轮胎动载荷,发现四轴车具有较好的行驶平顺性和较小的轮胎动载荷.文献[2]建立6×6整车 18 自由度的模型,并利用Matlab/Simulink分析了该车在时域和频域的操纵特性和驱动特性.文献[3]应用 ADAMS 软件在频域内分析了8×4重型卡车的平顺性,并优化了悬架刚度和阻尼.文献[4]以提高行驶平顺性为目的确立目标函数,应用遗传算法对各轴间的悬架刚度和阻尼进行匹配优化.
文中以三轴车为例,提出3种不同的悬架刚度匹配方案和3种阻尼系数匹配方案,根据车辆参数计算方案具体动力学参数取值,并组合出9种悬架动力学参数匹配方案.分别在随机路面输入和脉冲路面输入下[5],对9种方案进行仿真分析,得到不同路面输入以及不同组合的匹配方案对车辆平顺性所选4个指标的影响.提出在不同的路面输入和具体设计目的下,采用不同的悬架动力学参数匹配方案,以获得所需指标最优性能的设计方法.
1 三轴车9自由度整车模型建立
三轴车9自由度整车模型的9个自由度为车身垂直运动位移zb、车身俯仰角φ、车身侧倾角θ以及6个车轮的垂直运动位移zf1l,zf1r,zf2l,zf2r,zf3l,zf3r[6].为了简化研究,在建模过程中做如下假设: ① 路面对于同一轴左轮和右轮的输入相同; ② 同一轴左悬架和右悬架刚度相同、阻尼系数相同; ③ 三轴6个车轮轮胎刚度均相同; ④ 车身质心在第1轴和第2轴之间[7].9自由度整车模型如图1所示.
根据车轮和车身的受力情况,可得到如下动力学方程:
车身的垂直、俯仰、侧倾方程组为
(1)
式中:mb为簧上质量;Iy为俯仰转动惯量;Ix为侧倾转动惯量;l1,l2,l3分别为第1轴、第2轴、第3轴与车身的质心距离;F1l,F1r分别为第1轴左右悬架的作用力;F2l,F2r分别为第2轴左右悬架的作用力;F3l,F3r分别为第3轴左右悬架的作用力;B为车轮轮距.
(2)
式中:k1,k2,k3分别为第1轴、第2轴、第3轴的悬架初定刚度;c1,c2,c3分别为第1轴、第2轴、第3轴的悬架初定阻尼;zfil,zfir分别为第i轴左右车轮位移;zil,zir分别为第i轴左右簧载质量位移.
假设车身左倾,根据几何关系有
(3)
(4)
车轮的动力学方程为
(5)
式中:mf为簧下质量;kt为轮胎的刚度;qi为路面输入.

图1 三轴车9自由度整车模型
整车实际参数:mb为3 500 kg;mf为72.5 kg;Iy为17 300 kg·m2;Ix为4 720 kg·m2;l1为1.2 m;l2为0.15 m;l3为0.9 m;B为2.07 m;kt为500 000 N·m-1;k1,k2,k3均为53 500 N·m-1;c1,c2,c3均为5 793 N·s·m-1;m1为第1轴等效簧上质量,1 270.78 kg;m2为第2轴等效簧上质量,641.82 kg;m3为第3轴等效簧上质量,1 587.40 kg.各轴荷计算方法参考文献[8-9].
2 三轴车9自由度整车Simulink模型
2.1 路面输入
1) 随机路面输入.单位白噪声为输入时,路面不平度的微分方程[10]为
(6)
式中:n0为路面空间截止频率0.011 m-1;q(t)为路面不平度;u为车速;Gq(n0)为在空间频率为n0时的路面功率谱密度,称为路面不平度系数;ω(t)为均值为0的高斯白噪声.
2) 脉冲路面输入.采用底面长为40 cm,高为40 mm的等腰三角形凸块作为脉冲输入[11].
2.2 在Matlab/Simulink中搭建数学模型
模型输出量为车身垂直振动加速度、悬架动行程、车轮动载荷以及车身俯仰角加速度.采用这4个输出量作为多轴车行驶平顺性的指标[12].
3 三轴车动力学参数的匹配方案
3.1 三轴悬架刚度的匹配
匹配时,各轴悬架的阻尼系数保持不变,为了使原底盘的固有频率变化较小,故以原始设计参数的1.1倍和0.9倍作为设计变量的上下限.以该车现设计参数作为初始值,即各轴悬架刚度的变化范围为
0.9×53 500≤ki≤1.1×53 500,
i=1,2,3.
(7)
为保证车辆的整体参数变化较小,增加保证总刚度不变的约束,即
k1+k2+k3=160 500 N·m-1.
(8)
提出3种悬架刚度匹配方案: ① 各轴悬架刚度均相同(均为初定值); ② 各轴悬架偏频相同; ③ 中间轴刚度较大.
三轴偏频相同时,可得
(9)
根据式(9)和车辆参数可得
1.2k1=0.15k2+0.9k3.
(10)
悬架刚度匹配方案②选取参数为k1=50 083 N·m-1;k2=52 366 N·m-1;k3=58 050 N·m-1.
悬架刚度匹配方案③ 选取参数为k1=k3=51 225 N·m-1;k2=58 050 N·m-1.
3.2 三轴悬架阻尼的匹配
为保证车辆的整体参数变化不至于过大,此处增加保证总阻尼系数不变的约束,即
c1+c2+c3=17 379 N·s·m-1.
(11)
提出以下3种悬架阻尼匹配方案: ① 各轴悬架阻尼系数相同(均为初定值); ② 各轴阻尼比相同; ③ 中间轴阻尼系数较大.
阻尼比为

(12)
在各轴阻尼比相同时,对应悬架刚度的3种匹配方案,计算得到如下结果:
对应悬架刚度匹配方案①选取参数为
c1=6 143 N·s·m-1;c2=4 367 N·s·m-1;c3=6 869 N·s·m-1.
对应悬架刚度匹配方案②选取参数为
c1=5 931 N·s·m-1;c2=4 311 N·s·m-1;c3=7 137 N·s·m-1.
对应悬架刚度匹配方案③ 选取参数为
c1=6 037 N·s·m-1;c2=4 573 N·s·m-1;c3=6 769 N·s·m-1.
悬架阻尼匹配方案③选取参数为
c1=c3=0.95c=0.95×5 793=5 503.35 N·s·m-1;c2=1.1c=6 372.3 N·s·m-1.
4 不同匹配方案对平顺性指标的影响
对悬架刚度匹配方案和阻尼系数匹配方案进行两两组合,可得到9种不同的匹配方案.对这9种方案进行仿真分析,以刚度匹配方案为横坐标,以阻尼匹配方案为纵坐标,得到在不同组合方案下车辆平顺性指标的变化图.
4.1 随机路面输入及脉冲路面输入
随机路面输入,不同悬架参数匹配方案下,车辆平顺性指标的对比如图2所示,a为车身加速度均方根值;sh为悬架动行程均方根值总和;Fh为车轮动载荷均方根值总和;bh为车身俯仰角加速度均方根值.
脉冲路面输入,不同悬架参数匹配方案下,车辆平顺性指标的对比如图3所示,amax为车身加速度最大值;shmax为悬架动行程总和最大值;Fhmax为车轮动载荷总和最大值;bhmax为车身俯仰角加速度最大值.

图2 随机路面输入,不同悬架参数匹配下,车辆平顺性指标对比
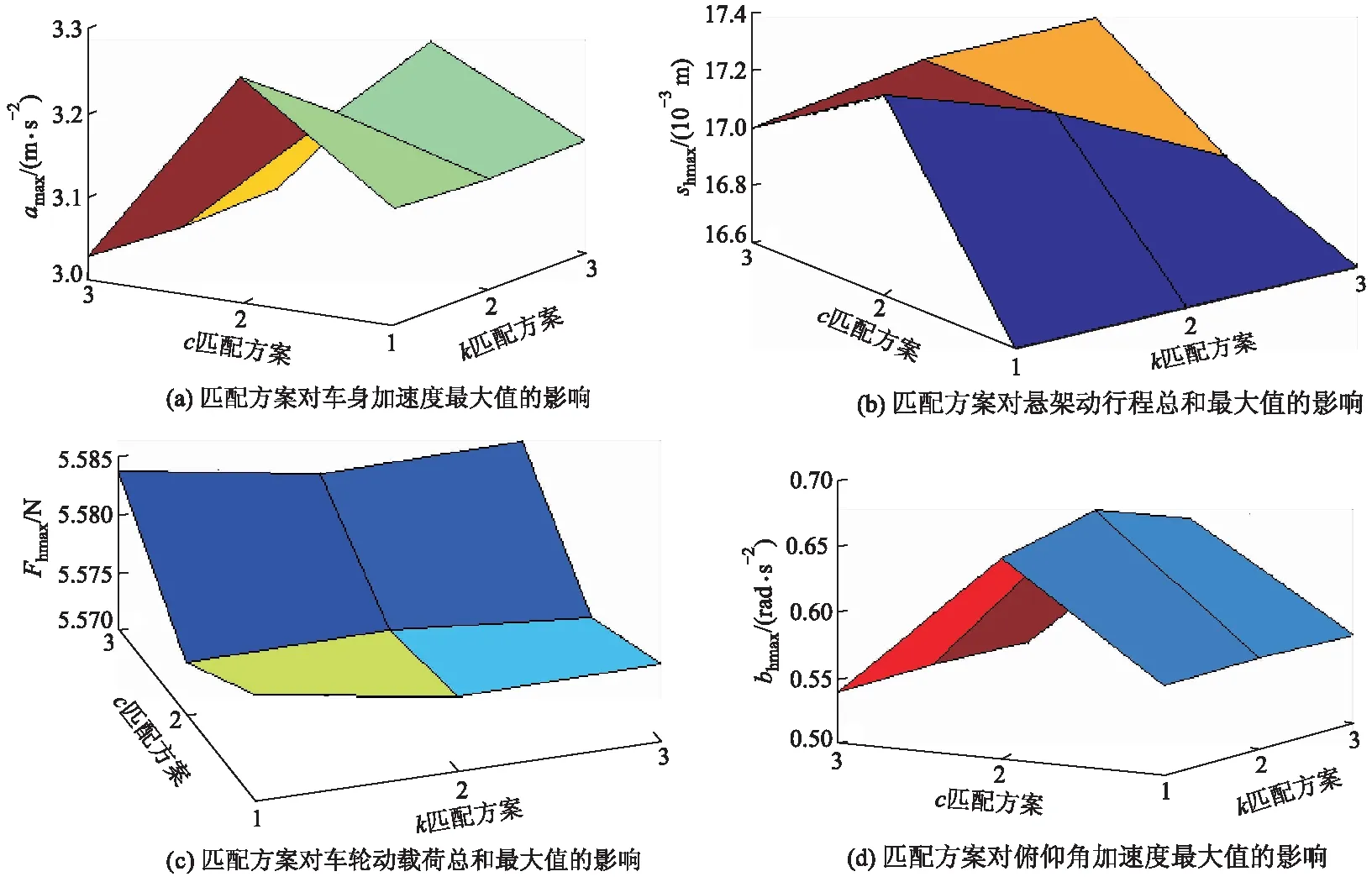
图3 脉冲路面输入,不同悬架参数匹配下,车辆平顺性指标对比
4.2 仿真结果分析
在实际设计中,可根据路面输入的实际情况和对平顺性某一具体指标的需求,选择对应指标最优的悬架动力学参数匹配方案.由图2,3可知,不同路面和不同平顺性指标下,对应采用的悬架动力学参数匹配方案如表1所示.

表1 动力学参数匹配方案
5 结 论
1) 如要获得最小车身加速度,随机路面下应采用偏频相同、阻尼比相同方案;脉冲路面下采用偏频相同、阻尼中间轴较大方案.
2) 如要获得最小悬架动行程,随机路面下脉冲路面下均应采用偏频相同、三轴阻尼相等方案.
3) 如要获得最小最小车轮动载荷, 随机路面下应采用偏频相同、三轴阻尼相等方案;脉冲路面下应采用刚度中间轴较大、阻尼比相同方案.
4) 如要获得最小车身俯仰角加速度,随机路面下应采用刚度三轴相同、阻尼中间轴较大;脉冲路面下应采用中间轴刚度、阻尼均较大方案.
参考文献(References)
[ 1 ] EL-DEMERDASH S M,RABEIH E M A.Ride perfor-mance analysis of multi-axle combat vehicles[C]∥SAE Technical Paper Series. USA: SAE Publication Group, Paper Number:2004-01-2079.
[ 2 ] HUH K, KIM J, HONG J. Handling and driving cha-racteristics for six-wheeled vehicles[J].Proceedings of the Institution of Mechanical Engineers,Part D: Journal of Automobile Engineering,2000,214 (2): 159-170.
[ 3 ] PANG H,LI H Y,FANG Z D,et al.Ride comfort optimization and test research on an 8×4 heavy truck[J].Noise & Vibration Worldwide,2010,41 (10): 65-71.
[ 4 ] 董明明,杨猛. 多轴越野车辆轴间刚度和阻尼的最优匹配[J].车辆与动力技术,2014 (4):40-44,49.
DONG M M,YANG M.Axial stiffness and damping optimal matching of multi-axle off-road vehicles[J].Vehicle & Power Technology,2014 (4):40-44,49. (in Chinese)
[ 5 ] 陈欣,祁涛,李栓成,等. 高机动性车辆越野平顺性分析方法研究[J]. 汽车工程,2008,30(9):736-741.
CHEN X,QI T,LI S C,et al.A study on the analysis method of the off-road ride comfort of high mobility vehicle[J].Automotive Engineering,2008,30(9):736-741. (in Chinese)
[ 6 ] 陈聪,汪盛,吴志成. 采用轮毂电机的轻型汽车悬架系统动力学参数匹配研究[C]∥2016中国汽车工程学会年会论文集. 北京:中国汽车工程学会,2016:884-888.
[ 7 ] 陈聪,汪盛,吴志成. 采用轮毂电机的轻型汽车振动特性对比研究[C]∥第二十七届全国振动与噪声应用学术会议论文集.北京:中国振动工程学会振动与噪声控制专业委员会,2016:192-198.
[ 8 ] 杨凌云,牛志刚,毛俊明,等. 某三轴载货车轴荷的优化设计[J]. 汽车实用技术,2015(1):78-81.
YANG L Y, NIU Z G, MAO J M,et al. Optimization design of a three axle truck axle load [J]. Automobile Applied Techonology,2015(1):78-81. (in Chinese)
[ 9 ] 王玉鑫,王青春,牛浩龙,等. 多轴汽车轴荷计算方法的研究[J].计算机仿真,2012,29(9):356-359,391.
WANG Y X,WANG Q C,NIU H L,et al. Research about axle load distribution[J].Computer Simulation,2012,29(9):356-359,391. (in Chinese)
[10] 余志生.汽车理论[M]. 北京:机械工业出版社,2000.
[11] 汪盛,陈聪,吴志成. 一种多轴连通油气悬架1/4车模型及仿真[C]∥2016中国汽车工程学会年会论文集.北京:中国汽车工程学会,2016:889-891.
[12] 高树新,宫镇. 汽车脉冲输入平顺性评价指标限值的研究[J]. 汽车技术,1996 (9):1-3,7.
GAO S X, GONG Z.Study on the limit value of vehicle impulse input smoothness evaluation index [J].Automobile Technology,1996(9):1-3,7. (in Chinese)
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
装备制造技术(2020年2期)2020-12-14
今日农业(2019年12期)2019-08-15
北方工业大学学报(2019年5期)2019-03-30
北京汽车(2016年6期)2016-10-13
汽车实用技术(2015年8期)2015-12-26
汽车维护与修理(2014年10期)2014-02-28
