国外编队飞行干涉SAR卫星系统发展综述
2018-02-28 00:44尹建凤张庆君刘杰张润宁赵良波张弛刘久利
航天器工程 2018年1期
尹建凤 张庆君 刘杰 张润宁 赵良波 张弛 刘久利
(北京空间飞行器总体设计部,北京 100094)
从20世纪90年代中后期,合成孔径雷达干涉测量技术逐渐成熟,应用领域不断扩展,成为SAR应用研究的热点之一。星载合成孔径雷达干涉测量系统以卫星或航天飞机为遥感平台,可广泛应用于地形测量(高精度的数字高程模型获取)、地壳形变(地震位移、地面沉降)测量、土地利用和洋流监测、运动目标指示等。利用星载干涉SAR技术进行地形高程测绘主要有3种方式:重复轨道干涉SAR、单航过双天线干涉SAR和编队飞行干涉SAR,这3种星载干涉SAR测量方式分别在不同的时间段成为了研究热点。在2000年NASA利用航天飞机实现单航过双天线干涉SAR卫星系统后,随着小卫星技术的发展,利用编队卫星技术进行干涉测量成为星载干涉SAR的研究热点,欧洲多个研究团队在该方向开展了深入研究,典型的方案有法日合作的“干涉车轮”(Cartwheel)计划[1-2]和德国的X频段陆地合成孔径雷达-附加数字高程测量(TanDEM-X)[3-5]系统,其中成功的典型代表是已经过在轨验证并成功应用的TanDEM-X系统[5-6]。国内针对这类系统的分析主要针对相对测高性能、数据处理等方面展开,对关键技术实现情况和最新应用的进展报道较少。
本文针对编队飞行干涉SAR系统现状进行调研分析,主要围绕系统性能指标、关键技术实现途径以及TanDEM-X的在轨应用情况几方面进行介绍,再对已成功应用的TanDEM-X系统的设计进行总结,得到启示,以供其他同类型卫星系统设计参考。
1 编队飞行干涉SAR系统及应用发展现状
1.1 法国Cartwheel计划
Cartwheel计划利用3颗小卫星进行编队(图1),每颗小卫星只用作接收,用一个传统在轨大卫星SAR发射信号,3颗小卫星的编队使得在任何时候都有一个垂直航向的基线和一个沿航向的基线,该系统有几种应用方向:利用其垂直航向基线可以获取数字地形高程图,利用沿航向基线测洋流和动目标,利用一发多收系统实现距离和方位超分辨等[1]。法国国家空间研究中心(French Space Agency,CNES)的研究人员分析,在考虑各种误差的情况下,Cartwheel联合ASAR微波雷达传感器得出的测高精度优于4 m。在2001年Cartwheel干涉SAR系统提出之初[1],提出了用3个偏心率相同、近地点不同的小卫星与大卫星组网的编队构型,小卫星间的相对运动为椭圆,同时考虑了用作发射源的大卫星包括“先进陆地观测卫星”(Advanced Land Observing Satellite,ALOS)和“环境卫星”(Environmental Satellite,Envisat)。2009年,又有学者对Cartwheel计划进行研究,发射源卫星增加了陆地合成孔径雷达-X频段(TerraSAR-X),并讨论了交轨钟摆、顺轨干涉车轮和干涉车轮-钟摆相结合的编队构型,认为如果只有2个接收小卫星的情况,交轨钟摆式编队构型较好,可提供周期性变化的交轨基线长度和稳定的顺轨基线;如果可有3个接收小卫星,则干涉车轮-钟摆相结合的编队构型更具有灵活性,能提供可变的顺轨、垂直基线和包络稳定的交轨基线[2]。2010年后关于Cartwheel计划的报道非常少,目前该计划仍停留在方案阶段,因此本文不对Cartwheel计划做深入论述。
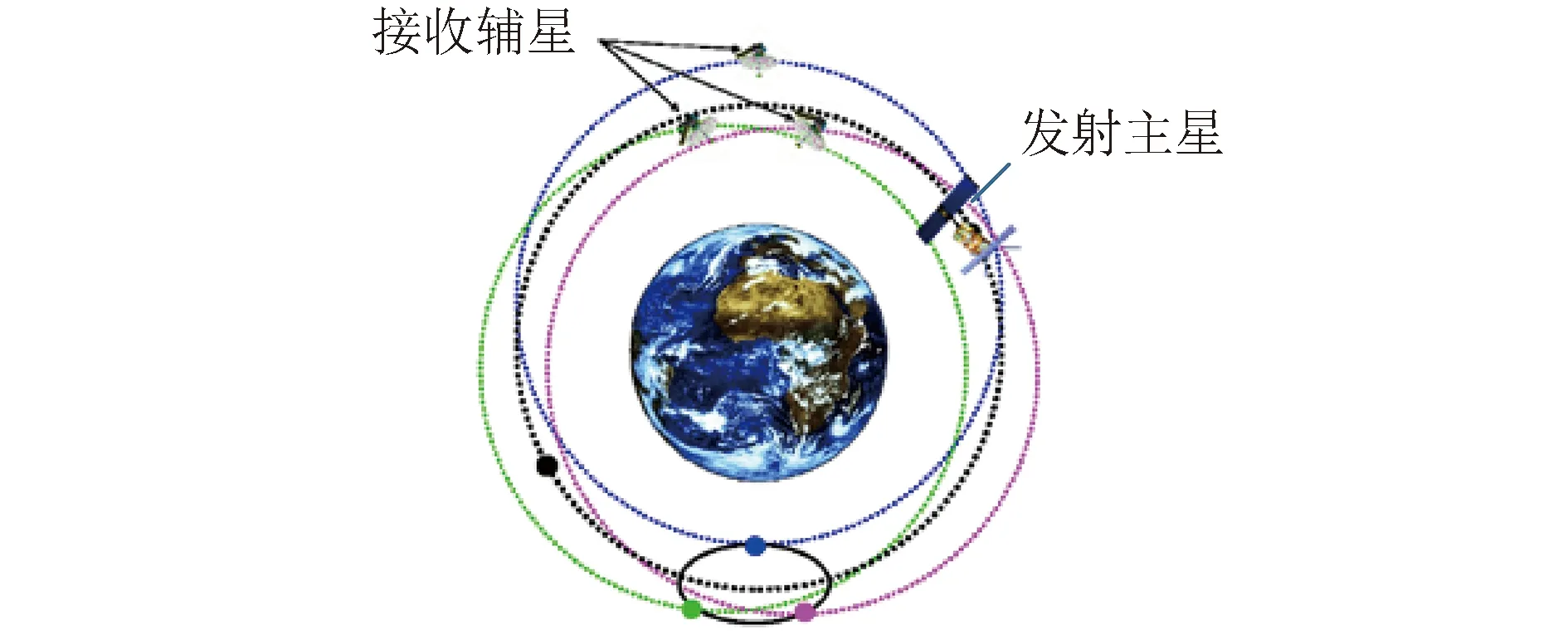
图1 Cartwheel干涉SAR卫星轨道构型示意Fig.1 Orbit formation of Cartwheel interferometric SAR satellites
1.2 德国TanDEM-X系统任务情况
1)TanDEM-X系统任务要求
TanDEM-X卫星是欧洲宇航防务集团(EADS)的Astrium公司和德国航天局联合研制的一颗卫星,2010年6月21日在拜科努尔发射场成功发射,它和2007年6月15日发射的TerraSAR-X卫星形成近距离编队飞行。TerraSAR-X是一颗用于科学研究和商业运营的X频段高分辨率SAR卫星,由德国教育科技部和德国航天局以及Astrium GmbH公司3家单位合作研制,至今仍在轨工作[3]。
为了便于编队飞行干涉SAR系统协同工作和保持高相干性,TanDEM-X仅相对TerraSAR-X做了非常小的改动,除此之外的平台和载荷完全相同,与干涉测绘任务相关的改动包括以下2点:
(1)为了实现自主编队飞行控制,TanDEM-X增加了用于接收TerraSAR-X的S频段遥测信号的接收机和解码器设备,以获取TerraSAR-X的位置、速度、姿态和工作模式等信息,为编队飞行机动控制指令的执行提供输入。
(2)TanDEM-X上增加了冷气推进系统,用于执行相对于TerraSAR-X的相对位置和姿态机动控制指令。
该系统的首要任务是完成对全球陆地高程的干涉测绘(通过几百米的典型交轨基线编队构型实现),其次是获取本土地区更高精度的数字高程模型(DEM)(通过增长空间基线长度实现),此外,还可以利用其顺轨基线在运动目标检测、地面交通管制和洋流监测方面有所应用[4-5]。
TanDEM-X系统编队构型如图2所示,任务性能要求如表1所示。
2)TanDEM-X系统工作模式、数据获取及应用情况[6-7]
利用TanDEM-X系统进行干涉SAR数据获取有3种模式,追赶式单站模式、标准双站模式和交替式双站模式,其收发波束示意图如图3所示。3种模式中,采用标准双站模式完成标准DEM数据产品的获取,其他模式将用于系统标校、确认和验证等试验数据的获取。
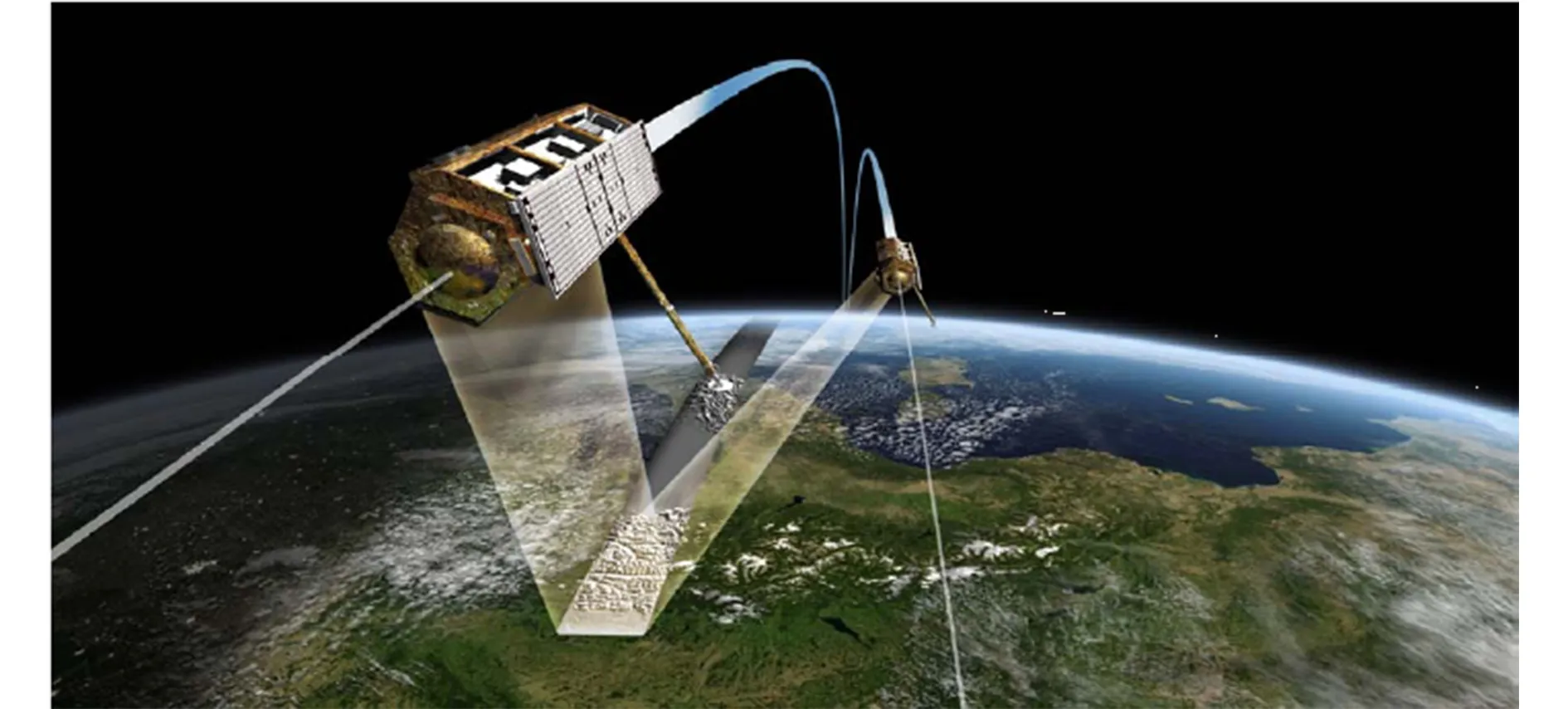
图2 TanDEM-X系统在轨飞行示意图Fig.2 TanDEM-X system on-orbit flying sketch map
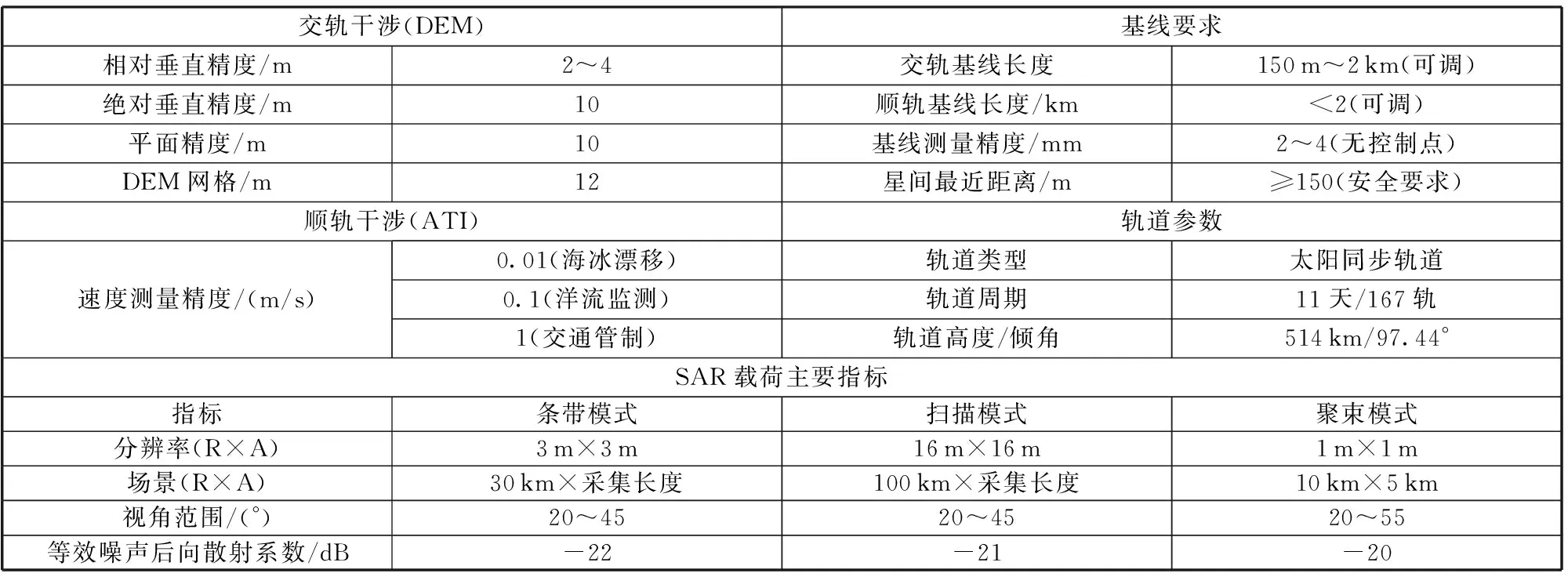
交轨干涉(DEM)基线要求相对垂直精度/m2~4交轨基线长度150m~2km(可调)绝对垂直精度/m10顺轨基线长度/km<2(可调)平面精度/m10基线测量精度/mm2~4(无控制点)DEM网格/m12星间最近距离/m≥150(安全要求)顺轨干涉(ATI)轨道参数速度测量精度/(m/s)0.01(海冰漂移)轨道类型太阳同步轨道0.1(洋流监测)轨道周期11天/167轨1(交通管制)轨道高度/倾角514km/97.44°SAR载荷主要指标指标条带模式扫描模式聚束模式分辨率(R×A)3m×3m16m×16m1m×1m场景(R×A)30km×采集长度100km×采集长度10km×5km视角范围/(°)20~4520~4520~55等效噪声后向散射系数/dB-22-21-20
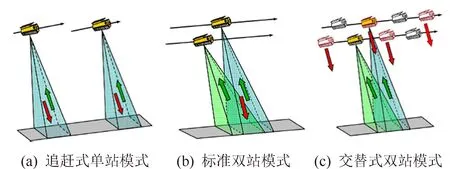
图3 TanDEM-X系统工作模式Fig.3 TanDEM-X dataacquisition mode
在TanDEM-X发射后至2010年10月14日,完成了双星编队构型调整和测试,双星间顺轨基线约为20 km,开始以单站追赶式模式工作,以验证TanDEM-X的系统性能和产品质量,确保与TerraSAR-X的成像质量相当。之后开始双站模式的试运行,主要任务是确认双站模式的信号链路完整可用。双站模式的难点是系统同步和干涉基线的测量与校准,经过足够的测试后,已于2010年12月采用标准式双站模式开始进行正常测绘作业,最优基线在150~500 m范围内。
截至目前,对照任务要求,TanDEM-X系统超出预期的完成了任务。从2010年12月开始,至2014年夏天已经完成了2次全球覆盖(包括南极洲)、两次对测图困难区的补充覆盖。目前,数据获取任务主要用于科学研究的需求。第一次全球覆盖在2012年3月完成,模糊高度为50 m,第二次全球覆盖在2013年3月完成,模糊高度选为35 m,两次模糊高度的选择经过合理优化,利于陡峭地区的相位解缠。2013年4月到2014年7月主要用于实现对测图困难地区的补充测绘,如陡峭崎岖地区、沙漠和森林地带。根据对数据的处理和评估结果,绝对高程精度优于10 m(99.73%),优于1.13 m的样本占90%,相对高程精度约为0.8 m,远远优于其设计指标。从2014年10月开始,TanDEM-X系统开始进行试验和科学应用,包括追赶式单站干涉、长交轨基线双站干涉、顺轨干涉、极化干涉、超分辨和数字波束形成[6-8]。
2 TanDEM-X系统关键技术突破情况分析
2.1 高精度星间基线测量技术
为了满足TanDEM-X系统的2 m相对高程测量精度要求,其空间基线估计精度需达到1 mm,为了实现这一目标,两颗卫星上都安装了跟踪、掩星和测距设备(TOR),包括高精度双频GPS接收机(集成的GPS掩星接收机,IGOR)和激光角反射器[9-10]。其中,大地测量应用的双频GPS接收机是决定空间基线测量精度的重要设备。通过地面上利用GPS信号模拟器的广泛验证,IGOR可达到的具有代表性的伪码和载波相位对应的精度分别为0.1 m和1 mm。另外,作为备份,每个卫星还都安装了L1载波单频GPS接收机,单载频接收机2008年在TerraSAR-X上的三维定轨精度达到了0.5~1 m,目前基于单频GPS的定轨精度可达到20 cm左右。
利用IGOR的伪距和载波相位测量值进行轨道确定,卫星的绝对位置确定精度可达到厘米级。TerraSAR-X早期的验证已表明利用激光测距可使轨道测量精度(rms)达到约3 cm。对TanDEM-X编队构型,由于星间距离较近,且采用的定轨方法有相似之处,所以两星的路径延迟和算法引起的定轨误差分量相近,将定轨结果差分可以消除两星的大部分公共误差分量,两星定轨结果差分即得到干涉基线矢量,因此利用差分双频GPS技术可进一步提高相对定位精度。在实际应用中,采用差分载波相位测量法获得两星的相对位置,一方面能够消除两星大部分共有的定轨误差,同时将载波相位和伪距数据融合解算GPS整周模糊度,这种方法的基线测量精度主要受载波相位测量噪声的影响,再通过算法优化和对更细节因素的补偿,星间基线测量精度可达1 mm以内。这种基于双频差分GPS技术的基线测量方法已经在“重力场反演与天气试验”(GRACE)卫星的A星和B星上进行过验证,当基线220 km时,基线测量精度达到0.7 mm,经过了Ka频段雷达的检验[11-12]。在TanDEM-X和TerraSAR-X上,由于没有其他设备作为检验手段,用2个不同研究机构的软件计算结果进行对照,得到的基线测量精度为[0.48,0.74,0.63] mm[13]。为了获得上述的高精度相对定位结果,TanDEM-X双星编队系统在精密定轨方面增加了以下工作:①对TanDEM-X的机动需要建立相应的轨道扰动模型,并消除这种机动对基线测量的影响;②星间时间同步,需要将TerraSAR-X和TanDEM-X的原始定轨数据同步到相同的GPS历元,以消除时钟误差的影响;③考虑并消除太阳光压的影响,对如此精确的相对轨道确定,即使是LEO轨道仍需要消除太阳光压的影响。
2.2 高精度星间同步技术
编队飞行干涉SAR的星间同步包括3个方面:时间同步,空间同步和频率同步。时间和空间同步是为了确保两颗星的主波束在同时覆盖地面同一区域、两星接收回波信号的时间窗口同步,频率同步(也称相位同步)是为了使两星各自频率漂移导致的干涉相位误差足够小,对干涉相位的影响可忽略[7,14]。
1)时间同步
TanDEM-X和TerraSAR-X每次开机成像时采用GPS秒脉冲触发产生雷达定时脉冲信号,后续定时脉冲信号由载荷内部晶振产生,由于两星载荷晶振的不一致将会导致SAR载荷的快时间产生不同的漂移,为避免对距离采样窗产生影响,需要调整采样脉冲重复间隔(PRI),这需要知道两个载荷的频率差,通过两星间的频率同步脉冲可以准确获知两个载荷的频率差,TanDEM-X的星间同步精度可达1 μs。
2)频率同步
为实现星间的时间和频率同步,采取两星对发频率同步脉冲的策略,为了保证近实时全方位的频率同步脉冲接收,在每个卫星上都安装6个同步喇叭天线以提供准全向波束覆盖。
星间频率同步的时序图如图4所示。为获取高信噪比同步信号,采用CHIRP信号作为同步脉冲。双站模式SAR数据获取将会被周期性地中断,此时同步脉冲将从卫星1的SAR主天线上发射至卫星2专用于同步的喇叭天线,卫星2记录该脉冲后再回传一短同步脉冲给卫星1,图4中τp为同步脉冲宽度,τ12为同步脉冲信号从卫星1到达卫星2的时间,τ21为信号从卫星2到卫星1的时间,τsys为从卫星1开始发射同步脉冲到卫星2开始返回第一个同步脉冲的时延。基本思路是通过对交换的同步脉冲信号处理获得两星上频率源引起的相位差异,以用其对双站干涉图进行相位补偿。另外,同步脉冲信号获取时可认为两频率源的频率是常数,因此还可从同步信号相位差的线性部分提取出其频率差,进而完成时间同步。
经过TanDEM-X系统在轨验证,当同步信号链的信噪比大于30 dB,且同步脉冲频率大于5 Hz时,可满足9.65 GHz的中心频率上,频率源相位误差不大于1°的双站干涉要求。当采用标准双站干涉模式时,两星距离几百米,同步信号的信噪比可以达到50 dB以上[15]。
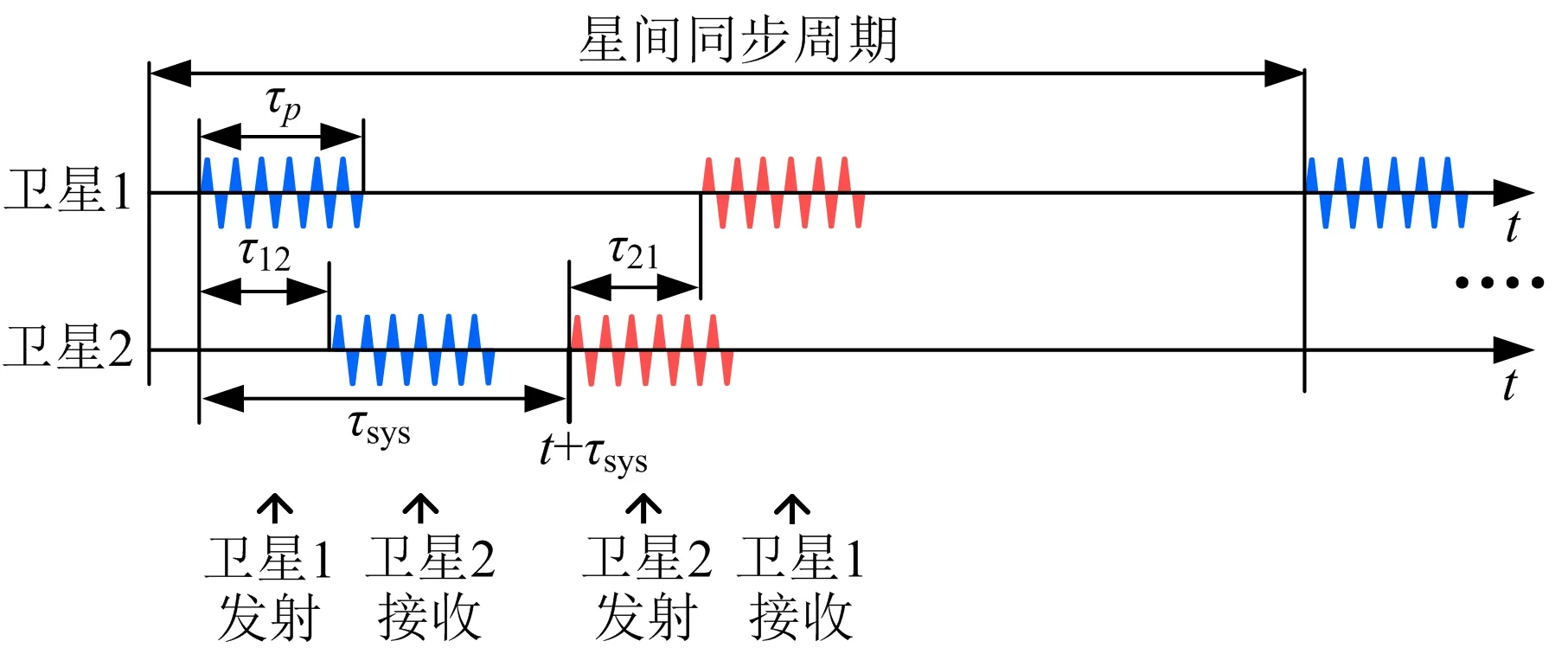
图4 星间同步脉冲时序图Fig.4 Timing diagram for exchange of synchronization pulses
3)空间同步
空间同步是为了使两星在成像时尽可能覆盖相同的地面成像区域,一般会认为采取主星天线正侧视指向成像区域、辅星天线以小角度斜视指向成像区域的方法会保证最好的观测区域重叠,但这会导致多普勒去相干增加。经过对上述波束导引策略和两星天线各自按正侧视进行波束导引两种方法比较,后者能达到的两星波束指向误差约为3%波束宽度,同时保持较好的多普勒相干性,会损失较小的增益(一般不大于0.5 dB),在系统增益较大的情况下,影响可忽略,因此TanDEM-X选择了后者。
2.3 编队飞行控制技术
TanDEM-X和TerraSAR-X选用HELIX编队构形,该构形通过对另一颗卫星设定不同的升交点赤经来获得轨道面外(水平方向)的星间距,通过设置不同的偏心率(e)和平近点角来获得轨道面内的星间距(垂直方向)[16]。如果两颗卫星都按标称轨道运行,则不会有碰撞的机会。然而,实际中,由于轨道初始设置误差的存在和各种扰动因素,两颗卫星将逐渐偏离其设计轨道,星间基线构型也将改变,其中最严重的就是Δe的顺时针方向漂移容易导致相对偏心率矢量与相对倾角矢量垂直,这就增加了编队卫星的碰撞概率。因此,必须进行编队构形保持。
经过多种构形保持策略的对比,选用了自主编队飞行控制(TAFF)策略,这种控制方法的精度比采用全部基于地面站控制的绝对轨道控制精度高10倍,其中TerraSAR-X是编队构形的主导者,TanDEM-X通过S频段星间链路接收TerraSAR-X的遥测信号,从遥测信号获取TerraSAR-X的轨道和姿态等信息,进而通过主动控制自己与TerraSAR-X的相对位置来保持该构形。TerraSAR-X的绝对轨道位置由地面控制,以使其接近标称轨道。为了保持编队构形不变,TanDEM-X需首先复制TerraSAR-X执行绝对轨道维持的指令,再进行小范围的轨道机动来校正自然轨道漂移和其他扰动导致的相对轨道参数变化。为了由TanDEM-X完成星间构形保持任务,除了在两颗卫星上都安装了用于绝对轨道维持的肼推进系统(两组4个1 N推力器)外,还专门在TanDEM-X上安装了高压氮气推进系统(两组4个40 mN推力器),这种冷气推进系统的推力比肼推进系统小得多,主要用于TanDEM-X的编队构形控制。根据分析,以两星定轨和定姿结果为输入实现相对导航,TanDEM-X的TAFF自主控制子系统的相对轨道控制精度为(相对TerraSAR-X卫星):径向方向2 m(沿半长轴方向),交轨方向10 m(1σ),其控制策略框图如图5所示。
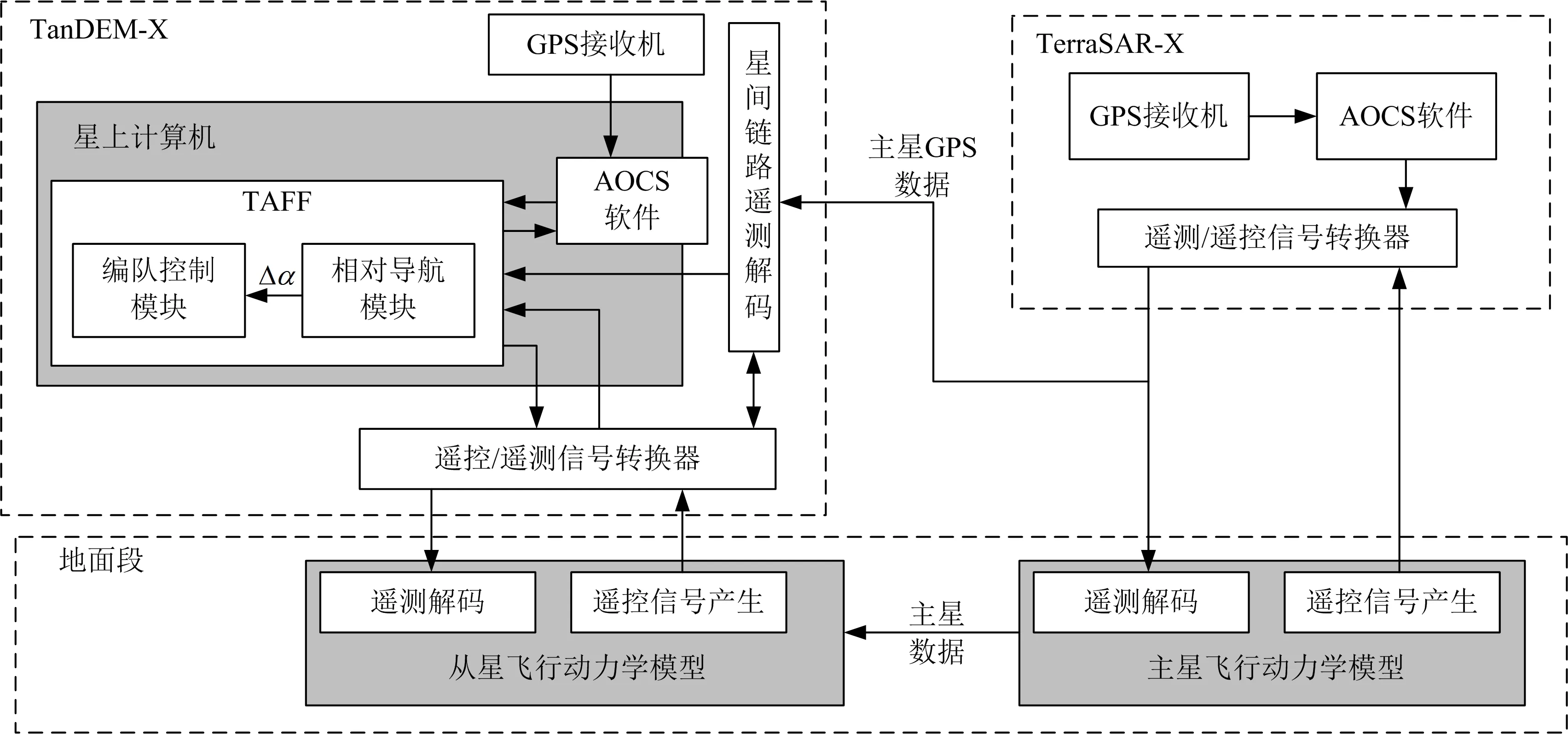
图5 编队构形控制策略框图Fig.5 Schematic functional view of autonomous formation flying
3 对其他类似系统研制的启示
3.1 系统总体设计启示
(1)从分布式干涉SAR的体制上讲,类似于TanDEM-X的双星编队系统的技术复杂度要低于类似于Cartwheel的一主多辅收发分置系统,因为后者主星与辅星距离较远,双站SAR特性明显,覆盖区域、分辨率等系统性能会随一发多收的编队构型发生变化使系统性能实现和控制相对困难,TanDEM-X编队构型主从两星间距离较近且相对稳定,基本等效于单站SAR,系统性能实现相对容易。
(2)TanDEM-X以相对简易的系统达到了目前全球陆地测绘的最高标准,主要取决于其在系统与任务层面的优化设计,如为了解决陡峭地区测绘问题,TanDEM-X系统以大小不同的两次模糊高度获取全球数据[6],针对沙漠地区后向散射系数小的问题,采取小入射角进行观测;TanDEM-X轨道构型在不同纬度的有效基线不同,可通过调整入射角维持相同的模糊高度,提高不同纬度地区的高程测量精度一致性。
(3)遥感卫星系统设计,应首先梳理最为关注的顶层系统指标,以这些顶层系统指标优化为目标,以影响顶层系统性能的各要素(关键技术/分系统/单机等)之间的逻辑关系为依据,实现整个系统的优化设计,而不是单独追求某个影响因素的极限指标,比如两颗卫星的偏航导引采用各自偏航导引的策略,虽然在覆盖重叠度和收发合成天线方向系数方面略有损失,但对相干性的保持有利;此外,应重视和提前预估数据处理在整个链路中的作用,避免过度提高某一段性能指标导致实现难度的大幅增加。
3.2 关键技术途径启示
1)波束对准策略
干涉SAR要求主副天线波束尽可能对准,以实现空间同步保证足够的重叠覆盖区域和收发合成天线增益。如2.2节所述,TanDEM-X系统没有采用辅星接收波束指向主星照射区域的策略,而是采取两颗SAR卫星都工作于正侧视模式,分别进行偏航导引的策略,即通过两颗卫星各自的姿态测量与控制和天线波束指向精度实现波束对准,在顺轨基线适当的条件下,能够在保证相干性的同时满足波束对准的要求,相比第1种策略,降低了实现难度。
2)时间同步策略
TanDEM-X系统时间同步采用的是在每次成像开始时以GPS秒脉冲触发,利用星间同步链路获得两载荷时间差的方法。我们在进行类似系统的设计时,可以依据当前的新技术,采取每秒利用GPS秒脉冲对SAR载荷授时的策略,两载荷的时间精度与GPS秒脉冲精度一致,这将减轻星间同步链路数据处理的工作量。
3)基线测量精度实现的启示
星间基线测量是编队飞行干涉SAR系统的技术难点,TanDEM-X采用差分GPS实现,硬件相对成熟简单,针对LEO亚毫米级的相对定位精度要求的特殊应用场景,主要从模型、算法方面进行补偿和修正,对辅星机动对轨道的干扰、两星时间同步和太阳光压对定轨的影响都进行了考虑和补偿。这为国内采取类似相对定位系统需要考虑的校正因素提供了参考。
4 结束语
从对目前关注度较高的两种体制的编队飞行干涉SAR系统,尤其是已在轨成功应用的TanDEM-X系统的调研分析,星地一体全链路的系统优化设计是实现卫星系统高效费比的关键,尤其需要重视数据处理的作用,应通过仿真试验等手段提前摸索、合理分解各部分的指标要求;TanDEM-X系统的星间基线测量、空间同步和频率同步以及编队飞行控制技术的解决途径可达到较好的性能,其时间同步方法可基于当前技术进行适当的改进,以减小实现的复杂度,以上结论可为类似系统的研究和研制提供参考。
References)
[1] Massonnet D. Capabilities and limitations of the interferometric Cartwheel[J]. IEEE Transactions on Geoscience and Remote Sensing, 2001,39(3): 506-520
[2] Erica H Peterson, Georgia Fotopoulos, Robert E Zee. A feasibility assessment for low-cost InSAR formation-flying microsatellites[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(8): 2847-2858
[3] Stefan Ochs, Eads Astrium Gmbh, Wolfgang Pitz, et al. The TerraSAR-X and TanDEM-X satellites[C]// 2007 3rd International Conference on Recent Advances in Space Technologies. Turkey: RAST,2007:294-298
[4] Alberto Moreira, Gerhard Krieger, Irena Hajnsek,et al. TanDEM-X: A TerraSAR-X add-on satellite for single-pass SAR interferometry[C]// 2004 IEEE Interenatial Geoscience and Remote Sensing Symposium. New York:IEEE, 2004: 1000-1003
[5] M Zink, Michael Bartusch, David Miller. TanDEM-X mission status[C]//2011 IEEE International Geoscience & Remote Sensing Symposium. New York: IEEE, 2011: 2290-2293
[6] Daniela Borla Tridon, Maria Donata Polimeni, Markus Bachmann,et al. TanDEM-X going for the DEM: acquisition, performance, and further activities[C]// 2015 IEEE 5thAsia-Pacific Conference on Synthetic Aperture Radar (APSAR). New York: IEEE, 2015: 163-168
[7] Gerhard Krieger, Hauke Fiedler, Irena Hajnsek. TanDEM-X:a satellite formation for high-resolution SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(11): 3317-3341
[8] DLR. Siesind hier: home[ED/OL]. [2016-09-30]. http://www.dlr.de/blogs/en/home/tandem-x.aspx
[9] Markus Rothacher, Byron D Tapley, Christoph Reigber, et al. The Tracking, Occultation and Ranging (TOR) instrument onboard TerraSAR-X and on TanDEM-X[C]// 2007 IEEE International Geoscience and Remote Sensing Symposium. Now York: IEEE, 2007: 4983-4986
[10] O Montenbruck, P W L Barneveld.GPS-based precision baseline reconstruction for the TanDEM-X SAR-formation[C]// 2007 19th International Symposium on Space Flight Dynamics.Annapolis USA:Coddard Space Flight Center, 2007: 1-13
[11] Kroes R, Montenbruck O, Bertiger W, et al. Precise GRACE baseline determination using GPS[J]. GPS Solutions, 2005(9): 21-31
[12] Gerardo Allende-Alba, Oliver Montenbruck. Robust and precise baseline determination of distributed spacecraft in LEO[J]. Advances in Space Research, 2016, 57: 46-63
[13] Moon Yongjin, Koenig Rolf, Wermuth Martin. Operational precise baseline determination for TanDEM-X DEM processing[C]// 2012 IEEE International Geoscience and Remote Sensing Symposium. New York: IEEE, 2012: 1633-1636
[14] R Klein, M Bachmann, G Krieger, et al. Performance prediction and verification for the synchronization link of TanDEM-X[C]// 2007 IEEE International Geoscience and Remote Sensing Symposium. New York: IEEE, 2007: 5206-5209
[15] Breit H Younis, M Balss U. Bistatic synchronization and processing of TanDEM-X data[C]// 2011 IEEE International Geoscience and Remote Sensing Symposium. New York: IEEE, 2011: 2424-2427
[16] J S Ardaens, S D Amico, B Kazeminejad. Spaceborne autonomous and ground based relative orbit control for the TerraSAR-X/TanDEM-X formation[C]// 2007 20th International Symposium on Space Flight Dynamics.Annapolis USA:Coddard Space Flight Center, 2007:1-13
猜你喜欢
航天器工程(2022年4期)2022-08-22
导航定位学报(2022年4期)2022-08-16
导航定位学报(2021年5期)2021-10-13
航天器工程(2021年1期)2021-03-03
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
航天器工程(2020年4期)2020-08-13
现代电子技术(2020年3期)2020-08-04
舰船科学技术(2020年3期)2020-04-22
导航定位学报(2019年2期)2019-06-06