探月工程管理创新与专项试验验证技术实践
2018-02-28 00:42孙为钢王博孟林智赵立军
航天器工程 2018年1期
孙为钢 王博 孟林智 赵立军
(1 中国航天科技集团有限公司,北京 100048)(2 北京空间飞行器总体设计部,北京 100094)
月球是距离地球最近的天体,它蕴藏着丰富的自然资源和能源,一直是各国开展深空探测的起点和基础,也是目前人类认识最为深入的地外天体。在20世纪50年代末60年代初,苏联和美国相继发射了月球探测器,特别是美国在1969年阿波罗11号飞船实现了人类的首次载人登月,显示了人类的智慧和能力。
中国的航天活动开始于20世纪60年代,1970年4月24日成功发射第一颗人造地球卫星。2000年11月22日,国务院发表了《中国的航天》白皮书,明确提出了开展以月球探测为主的深空探测发展目标。2002年起,原国防科工委组织建立了全国大协作的工程体系框架,结合国际月球探测的主要特点,充分考虑我国的技术水平、综合国力和整体发展规划,提出了我国实施月球探测的发展思路:坚持“循序渐进、分步实施、不断跨越”的原则,逐步积累技术和经验,及时提高运载能力以适应深空探测的发展需求,于2020年前完成我国的探月工程,即嫦娥工程[1]。探月工程分三个阶段实施:绕月探测,月球软着陆和自动巡视勘察,自动采样返回,简称“绕、落、回”。目前,探月一期(嫦娥一号)、二期(嫦娥三号)已圆满完成,三期(嫦娥五号)正在实施。其中,嫦娥二号、四号、六号分别为一号、三号和五号任务的备份,进行改造后执行新的任务。
我国正在开展未来深空探测任务的论证工作,通过探月工程实施所形成管理和技术创新研究成果将对未来深空探测任务的实施具有重要的借鉴和应用价值。尤其是探月工程三期月面采样返回探测任务具有长征五号火箭首次正式任务发射、探测器四器组合系统复杂、任务实施关键环节多、关键技术难度大等特点,对地面试验验证的要求极高,其所牵引发展的新型专项地面验证试验技术和设施具有代表性,可应用于后续深空探测工程研制中。因此,本文在简要描述探月工程主要进展、管理和技术创新等方面情况的基础上,重点总结分析了探月工程三期所牵引发展的探测器和运载火箭系统7项典型大型地面专项试验验证技术的主要目的、实施和应用等情况。
1 探月工程成就与创新
1.1 主要成就
1.1.1 探月一期
2004年,探月一期工程正式获批立项,揭开了我国开展月球及深空探测活动的序幕。经过3年多的研制,2007年10月24日,我国发射了第一个月球探测器——嫦娥一号卫星,实现了继人造地球卫星、载人航天之后我国航天活动的第三个里程碑,初步构建了完整的探月工程体系,使我国跨入世界上具有深空探测能力国家的行列[2]。嫦娥一号卫星在轨运行495天后,于2009年3月1日受控撞击于月球的丰富海区域(东经52.36°、南纬1.5°),为探月一期工程画上圆满的句号[1]。嫦娥一号成功后,嫦娥二号调整为探月二期的技术先导星。嫦娥二号卫星于2010年10月1日成功发射,2011年4月1日圆满实现既定六大工程目标,完成了规定的技术验证项目,并获取了以7 m分辨率全月球图像为代表的一大批科学成果。之后,通过创新设计,充分利用卫星剩余资源,设计了多阶段拓展任务,通过一次发射任务完成了月球、日-地L2点、图塔蒂斯小行星的多目标探测,使嫦娥二号卫星成为我国首颗飞入行星际的探测器,突破了多项关键技术,取得了“低成本、高质量、高回报”的突出实效,将中国深空探测事业推进到一个新的高度[3]。
1.1.2 探月二期
2008年,探月二期工程立项并进入工程实施阶段。其主要目标是实现月面软着陆,开展月面就位探测与巡视勘察。2013年12月2日,中国成功发射嫦娥三号探测器,于12月14日自主软着陆于月球“虹湾”区域,释放玉兔号月球车至月球表面,实现了月面软着陆和巡视探测。嫦娥三号探测器是一个全新的航天器,是我国第一次在地球以外的天体上进行就位和巡视探测[4]。通过大量的设计分析、关键技术攻关和地面验证试验,突破了月球软着陆和月面巡视的核心关键技术。嫦娥三号成功后,其备份星嫦娥四号赋予了新的任务使命,将实施人类首次月球背面软着陆,开展就位与巡视探测,并通过中继星将探测数据传输回地球。嫦娥四号计划于2018年左右发射,着陆区初步选择于月球背面南极艾特肯盆地上[5]。
1.1.3 探月三期
2011年,探月三期工程立项,任务目标是实现月面无人采样返回,同时进一步完善基础设施建设,为深空探测夯实技术研究、试验验证、质量体系保障、人才队伍培养等基础。探月三期工程采用新研制的长征五号运载火箭,在新建的海南发射场,发射全新的嫦娥五号探测器。整个任务流程将近1个月。在这个方案中,要在嫦娥三号月面软着陆的基础上,突破月面表取采样、钻取采样、月球样品封装、月面起飞技术、月球轨道交会对接、样品转移等技术,工程中还要实现多次分离,以及高精度的轨道测量和控制。为降低工程风险,探月三期工程于2014年10月成功进行了绕月返回地球并实现一次跳跃式再入大气层的飞行试验,验证了半弹道跳跃式再入的气动、热防护、再入GNC等技术[6],获取了有效的试验数据。
1.2 主要创新
1.2.1 管理创新
作为航天领域的国家重大科技工程,探月工程在管理方面,按照国家重大科技专项管理有关要求,结合航天型号系统工程管理、民用航天工程管理、项目管理等的优点,形成特有的管理模式和方法。
探月工程成立重大专项领导小组,负责研究决策工程研制过程中的重大事项;专门设立工程大总体,负责工程计划、质量、经费、保障条件等全要素管理和大总体协调工作;运载火箭、探测器、发射场、测控、地面应用系统各负其责,分头开展各系统研制建设工作;实施工程两总负责制和分级管理制度,任命工程总指挥、总师、副总指挥、副总师,五大系统任命型号总指挥、总师、副总指挥、副总师,分层落实责任制;研制过程中实行重大专项领导小组会、工程总师例会、月度研制调度会等机制。各级责任制的落实和行之有效机制的实施确保了工程研制顺利进行。
深空探测任务相对于地球轨道卫星任务,具有任务规模复杂、探测器构形特殊、环境极端恶劣、飞行距离远、飞行程序关键环节多、关键技术难度大、地面验证难等特点,中国航天科技集团有限公司实施重大技术独立评估,大力开展飞行事件保证链分析,有效识别和控制工程研制过程中的风险,确保了各项任务圆满成功。
1)重大技术独立评估
重大技术独立评估是针对中国航天科技集团有限公司、甚至中国航天领域首次遇到的、影响任务成败的重大技术,聘请独立于探月工程研制队伍以外的、国内(含公司以外的)相关专业技术领域权威或知名专家,从第三方角度,对重大技术方案的正确性、地面验证的充分性、技术风险控制的有效性等方面开展评估,并给出意见和建议,为探月工程研制队伍提供支撑和参考。在组织方式上,成立独立评估委员会,根据重大技术涉及的专业技术方向,下设几个专题评估组,遵循独立、专业、客观、深入的工作原则,通过听取汇报、查阅资料、实物考证、交流质询、分析研究、复核复算、试验验证等方式开展评价工作。
2012年,重大技术独立评估的措施和方法首次在嫦娥三号任务中得以应用,成果作用显著。评估委员会成立总体技术、安全着陆、巡视探测、推进技术四个专题评估组,共提出406项评估意见和待办事项,探测器系统针对专家意见进行了复查和改进,确保问题全部闭环,为嫦娥三号探测器技术风险可控、任务圆满成功提供了有力的保障。重大技术独立评估在嫦娥三号任务中的成功应用,为其它重大航天器管理工作提供了经验和借鉴,并在后续的探月三期探测器系统半弹道高速跳跃式再入返回试验、嫦娥五号月面采样返回、嫦娥四号月球背面软着陆和巡视勘察等任务中加以应用,充分发挥外部专家力量,为重大工程顺利实施保驾护航。
2)飞行事件保证链分析
飞行事件保证链分析是指探测器和运载火箭系统总体、分系统和单机承研单位对相应各级飞行事件的输入条件、输出结果、执行时间以及与其它事件的关联进行梳理分析,对飞行事件的关键动作进行清理,确定重点保证工作项目,明确各飞行事件的责任制和工作要求,落实责任人,制定地面测试、飞行遥测数据的分析准则,并以此来判定工作程序中每一事件执行是否成功,提出确保各飞行事件成功、系统或单机的功能稳定实现的措施,形成与飞行事件链相对应的保证链。
飞行事件保证链分析方法在探月工程运载火箭系统和探测器系统研制中得到大力推行和应用。特别是长征五号运载火箭专项立项后,在方案、初样、试样等不同研制阶段针对飞行事件开展了深入的保证链研究和迭代分析,并据此完善了地面验证试验矩阵、故障预案等技术和质量管理工作,为探月三期任务的研制提供了有力的保障。
1.2.2 技术创新
通过探月工程的实施,我国已经突破了月球环绕、软着陆、就位和巡视、采样返回等一系列深空探测关键技术,具备对月球进行科学探测的基本能力[1]。主要关键技术创新包括:
(1)运载火箭窄窗口多弹道发射技术,包括火箭发射与飞行技术、确保火箭运载能力的措施与技术、发射场技术等;
(2)探测器地月转移和环月飞行轨道设计技术,包括地月直接转移轨道优化设计、环月飞行轨道优化、着陆/上升轨道设计、月面轨道调整优化等[3];
(3)深空制导、导航与控制技术,包括三体指向控制新技术、高精度自主变轨控制技术、控制系统体系结构技术、系统容错-重构技术等[3];
(4)深空远距离测控通信技术,包括测控通信体制研究、多探测器通信与相对定位技术、多元数据处理技术、集成化综合电子系统、星载测控通信设备等[5];
(5)月面软着陆技术,包括软着陆导航与控制、轻型桁架式主承力结构、软着陆缓冲机构、可调推力式推进等技术[7];
(6)月面巡视与控制技术,包括月面移动、环境感知、路径规划与控制等技术[4];
(7)月夜生存技术,包括先进热控技术、同位素能源技术、机构的润滑、密封技术和重复展开技术、元器件的月面生存低温耐受技术等[4];
(8)月面自动采样与封装技术,包括采样封装综合设计技术、样品采集与定型技术、样品封装与稳固技术、样品长期存储技术等;
(9)月面起飞上升技术,包括基于着陆平台的月面起飞技术,月面起飞上升制导、导航与控制技术,月面起飞地面试验验证技术等;
(10)月球轨道交会对接技术,包括交会对接总体设计与验证技术、交会对接GNC技术、弱撞击式对接机构技术等;
(11)接近第二宇宙速度返回地球高速跳跃式再入大气技术,包括高速再入制导与控制技术、气动分析与试验技术、防热结构技术、回收着陆技术等[6];
(12)深空新型科学载荷技术,包括高分辨率CCD立体相机、微波探测仪、激光高度计、伽玛谱仪、X射线谱仪、γ/X射线谱仪、太阳风高能粒子探测器、太阳离子探测器、月基光学望远镜、紫外相机、双通道超宽带时域脉冲雷达等[8]。
以上关键技术的突破进一步提升中国航天技术水平,形成了月球探测工程基本技术体系,为未来火星、小行星、木星系乃至太阳系外科学探测奠定了坚实的基础。
关键技术的突破离不开地面试验验证,探月工程针对各项深空探测关键技术的需求,牵引支持开展专项地面试验验证技术研究,已经初步形成了深空探测地面试验验证体系,确保了探月工程研制工作的顺利进行,也为未来深空探测任务的实施奠定了坚实的基础。
2 探月工程三期地面试验验证技术
月球及深空任务探测器发射后一旦出现故障几乎不可能维修,为了提高探测器可靠度,降低任务风险,发射前进行充分的地面环境试验十分必要。月球及深空探测器与地球轨道航天器在考虑环境适应性和环境试验方面有许多相似之处,但也有不同之处,特别是环绕、着陆、采样返回探测任务中的空间环境、进入环境、着陆环境及天体表面环境的特殊性,需要解决地面环境模拟试验的一系列具体的技术难题,同时需要建造和完善相关的环境试验设施,通过充分的试验发现产品方案或制造质量方面各种潜在的问题和缺陷。
月球及深空探测任务遇到的环境有自然环境和诱导环境两大类,前者是客观存在的,后者是探测器和运载火箭产生的[9]。环境对探测器的影响涉及机械、电、热、磁、光学、辐射等各个专业技术领域,环境对探测器产品产生的环境效应可在材料、元器件、组件、分系统、系统等各种装配级别上表现出来。环境试验验证工作贯穿于整个型号的研制计划中,不同的研制阶段需要进行不同的环境试验来达到不同的试验目的。
针对全任务周期内经受的环境,在综合考虑效益、进度、可行性的前提下,需尽可能地在地面针对各个环境进行验证,以验证产品的设计方案、工艺方案的正确性和合理性,暴露产品制造质量、材料、工艺方面的缺陷,排除早期失效,提高工作寿命期间的使用可靠性。
针对探月工程这些高度复杂的工程任务,在规划系统级地面验证试验时应遵循以下基本原则:
(1)能够对试验对象进行充分验证。
(2)试验边界条件不能低于真实的环境经历,能够对试验对象起到加严考核的目的。
(3)在满足试验目的的基础上,试验方法尽量简单、安全、可靠。
(4)试验工况在覆盖在轨工作工况的前提下尽可能的少。
以探月三期工程为例,其任务面临的技术挑战是前所未有的,新技术更多,试验验证更难。长征五号运载火箭和嫦娥五号探测器应用了大量的新技术和新产品,均需在地面进行充分的试验验证。基于上述原则,除了进行比常规任务更为复杂的力学试验、热试验、电性能综合试验和大系统对接试验等地面试验外,工程任务还开展了交会对接与样品转移专项试验、着陆起飞综合验证试验、采样封装专项试验、全尺寸羽流导流试验、样品转移联合验证试验、高超再入及风洞试验等20余项地面专项试验。
下面结合探月三期工程任务实施中的7个有代表性的专项验证试验,介绍其地面试验技术和基础设施的带动性。
2.1 全箭模态专项试验
全箭模态专项试验的目的是获取高精度的全箭振动特性参数,为箭上控制系统参数设计提供依据。
探月三期工程研制中,针对该验证需求建造了火箭振动试验塔,用于新一代大型运载火箭全箭及部段模态试验,如图1所示。该试验可满足起飞质量小于1500 t的大型火箭全箭动特性试验需求,提升了运载火箭系统的地面试验验证能力。

图1 全箭模态专项试验Fig.1 Overall modal test of launch vehicle
嫦娥五号探测器和运载火箭联合开展了模态试验,取得了高精度全箭振动特性参数,修正了相应模型,为箭上控制系统参数设计提供了依据,为长征五号首飞成功奠定了基础。
2.2 着陆起飞综合验证试验
软着陆前,探测器一般通过轨控发动机进行动力下降段减速。由于动力下降过程中涉及到测距、测速、地形识别、导航敏感器的自主导航控制、控制和推进系统的协调工作等复杂过程,需要在地面对动力下降段过程进行试验验证[9]。但是若在地面验证整个动力下降过程,在现有的技术条件下几乎是不可能的,也是没有必要的。动力下降段着陆器需完成减速、地形识别、避障、悬停及关机等关键动作,而悬停段、避障段、缓速下降段中着陆器也包含这些关键动作,综合考虑经费、研制进度和地面模拟方法的局限性,采用悬停段、避障段、缓速下降段地面试验验证整个动力下降过程是充分必要的。
月面稳定、可靠起飞是上升器月面上升、入轨的前提,上升器月面起飞瞬间过程包含复杂的瞬态动力学问题,需要研究起飞平台倾角、支撑状态、连接解锁特性、发动机推力特性等综合因素对月面上升动力稳定性影响,建立耦合动力学模型,在理论分析的基础上,需要进行月面起飞的地面综合试验,以对理论模型进行验证,并通过月面起飞的地面综合试验对月面上升关键参数的关联性进行分析、验证。
参考探月二期工程研制经验,结合月面着陆和上升验证需求,工程任务中设计了着陆起飞综合验证试验。着陆起飞综合验证试验的目的是考核起飞稳定性及控制系统交接条件满足性,考核探测器系统的控制能力,验证上升器对不同起飞初始条件的适应能力,综合演练起飞工作过程,验证起飞程序设计的正确性。
试验系统主要包括验证器和试验场系统,其中,验证器一般包括涉及起飞上升过程的着陆器和上升器,试验场系统一般包括试验架、模拟月表、地面测量、指挥控制和试验保障子系统等组成部分。
探月三期工程研制中,针对该验证需求建设了大型月球着陆起飞综合试验场,研制了跨度约100 m、高约110 m的着陆起飞试验塔架等试验设施。该设施在高度方向上提供了约70 m的运动空间,可提供全物理仿真条件模拟软着陆和起飞过程,在充分接近真实情况下考核方案,验证控制、推进等分系统间工作的匹配性、可靠性,如图2所示。
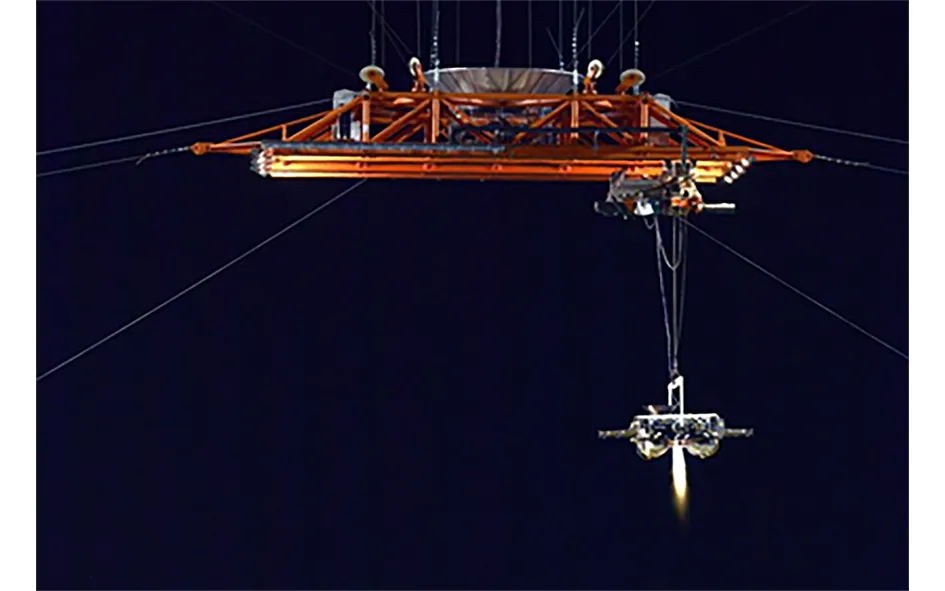
图2 着陆起飞综合验证试验Fig.2 Landing and flying-off comprehensive test
利用建成的大型月球着陆起飞综合试验场,开展了着陆稳定性试验和着陆起飞综合验证试验。其中,着陆稳定性试验验证了月球重力场下着陆面地形地貌和着陆面力学参数对着陆稳定性的影响;进行了着陆冲击试验,获取了器上主要部位的冲击响应,并对单机力学环境条件的正确性进行了确认。着陆起飞综合验证试验,主要包括不点火试验和点火试验两个阶段。重点验证了软着陆过程中安全区域的识别能力及避障控制性能、综合控制能力、月面起飞过程的稳定性以及月面软着陆及起飞程序设计的正确性。同时也摸索、掌握了一系列针对软着陆的地面验证试验方案和试验方法。
2.3 采样封装专项试验
探月三期工程嫦娥五号采用钻取机构获取月表以下、最大深度约2 m的样品;采用机械臂加末端采样器的方式实现月表采样。通常为了确保样品保持在目标天体表面的特性不受后续飞行过程的影响,一般均要采取必要的密封手段,即将样品进行初级封装或整形的样品包装密封保存,并将密封的样品转移到返回舱。在设计样品采集、封装和转移方案时,特别是设计相应的机构时,除了考虑飞行过程经历的力学、温度、真空、辐照等环境条件,还要考虑目标天体表面的粉尘、重力、光照、地形和天体表面的地质特性等环境因素对机构设计的影响,确保相应的机构能够适应所经历的环境以及过程中的不确定因素;需在地面开展充分的采样封装专项试验验证。
采样封装专项试验的目的是验证任务实施中采样及封装过程主要设备的功能、性能与接口匹配性,以及采样程序的正确性和合理性。
探月三期工程研制中,针对该验证需求建设了地外天体采样封装任务试验场。该试验场具备模拟地外天体低重力、复杂土壤特性、光照环境、探测器着陆状态等条件能力,可满足月球及后续深空探测器采样与封装试验需求,如图3所示。

图3 采样封装专项试验Fig.3 Sample collection and packaging test
嫦娥五号开展了采样封装专项试验,根据具体试验目的和工况,试验项目主要包括标称采样封装、倾斜姿态采样封装、极端模拟月壤采样封装、采样封装排故演练等多类试验。重点验证了采样封装过程主要设备的功能、性能与接口匹配性以及采样程序的正确性和合理性;达到了程序验证、控制方案验证、设备验证等目标,积累了地外天体采样过程真实模拟试验的数据和经验,有力支撑了采样封装的系统设计。
2.4 全尺寸羽流导流专项试验
探测器完成月面探测及采样任务后,需要利用发动机将上升器从月面推入环月轨道。由于上升器与着陆器或上升器发射平台距离较近,因此两级分离期间将在着陆器或上升器发射平台的顶板和上升器的底部产生很高的压力和热流,直至两器之间充分分离,即发动机羽流能自由扩散,没有来自着陆器或上升器发射平台的羽流反射。这种在两级之间有限区域内由发动机点火产生的热效应,需要开展上升器起飞羽流影响试验验证。
全尺寸羽流导流专项试验的目的是验证上升器起飞发动机与羽流导流装置的相容性,验证典型工况条件下起飞发动机羽流对上升器、着陆器的综合力、热效应,考核羽流热防护材料性能及防护效果。
全尺寸羽流导流试验系统由验证器和试验场组成。试验中上升验证器与着陆验证器安装于高模台真空舱内,其中上升验证器通过转接装置固定垂直安装在承力架上,着陆验证器被安装于位姿调整装置上,并可与其一起运动。针对该验证需求建设了全尺寸羽流导流试验场,主要用于完成3000 N以下推力发动机的羽流试验、空间飞行器及其部组件高真空环境试验、推进剂高真空蒸发试验等项目,如图4所示。

图4 全尺寸羽流导流专项试验Fig.4 Full size conduction test
通过开展全尺寸羽流导流专项试验,获取了发动机羽流对上升器、着陆器的综合力和热效应数据,验证了发动机与羽流导流装置的相容性。同时也提升了羽流扰动力测量、真空压力场测量、发动机燃气流激波测量及低温下测量设备温度控制等方面的技术水平。
2.5 交会对接与样品转移专项试验
交会对接过程的重点难点是导航、制导与控制技术。交会对接过程中,一般情况下导航、制导与控制的主要任务是完成上升器和轨道器的轨道和姿态控制、实现远程交会和近程控制,包括捕获、跟踪与测量、近程引导直至轨道器接近上升器并满足对接条件。近程引导与控制一般要完全依靠上升器和轨道器自主完成,除了控制计算机的自主能力提高、制导控制方法的精度要求需满足后续对接等任务需求,最重要的技术难点就是相对测量,即通过上升器和轨道器携带的敏感器测量两个飞行器之间的运动参数。目前主要的相对测量技术主要有微波测距测速、激光测距测速和光学成像测距测速等,这些测量手段的作用距离、测量精度和对环境的适应性等存在差异,需根据任务需要配置一种或多种敏感器,共同完成近距离的相对测量,进而实现近程自主交会控制。
交会对接与样品转移专项试验的目的是验证交会对接过程中探测器系统的控制性能,验证控制系统、对接/样品转移机构的匹配性,验证交会对接飞行程序设计的正确性。
交会对接与样品转移专项试验系统主要包括验证器和试验场系统,其中,验证器一般为模拟的轨道器、返回器和上升器,由交会对接端面、器上产品及其模拟件、器上仿真控制系统等组成,试验场系统一般包括大型超平支撑气浮平台及其控制系统、高精度基准、可视化演示、地面总控和现场监视等组成部分。
交会对接与样品转移专项试验采用在大型超平支撑平台上的2台六自由度气浮台(分别模拟轨道器和上升器),模拟微重力环境下轨道器和上升器的相对位置与姿态运动。大型超平支撑平台由200块大理石组成,每块大理石都可以调整,构成平面度优于0.63 mm的30 m×40 m(1200 m2)的平面,是六自由度气浮台平面运动的基准平面和承载平面,平台负载能力可达10 000 kg,具备了调平到水平度角秒量级、台阶差微米量级的水平。为此,探月三期工程研制中,针对该验证需求建造了交会对接全物理试验平台,采用六自由度气浮台等设施实现了嫦娥五号探测器交会对接与样品转移过程的全物理仿真验证,如图5所示。
通过开展交会对接与样品转移专项试验,主要针对近程交会接近段控制、对接抓捕、撤离控制和交会对接全过程开展了地面验证,包含正常及拉偏条件模拟工况,重点验证了控制系统、对接机构与样品转移机构在整个交会对接和样品转移任务中的时序协调性和设计正确性,为控制系统、飞行时序等设计提供了依据。

图5 交会对接与样品转移专项试验Fig.5 Rendezvous-docking and sample transfer test
2.6 样品转移联合验证专项试验
当两个飞行器间的相对关系满足对接或样品转移初始条件后,需通过对接机构将两个飞行器可靠连接在一起,通过样品转移机构将样品和容器从一个飞行器转移到另外一个飞行器中。
样品转移联合验证试验的目的是验证样品转移任务相关产品之间接口的正确性、匹配性、协调性。
样品转移联合验证试验系统主要由对接与样品转移机构整机特性测试台、对接与样品转移机构主动件、被动件、密封封装装置、样品舱、对接与样品转移综合管理单元和综合测试设备等组成。
样品转移联合验证试验利用对接与样品转移机构整机特性测试台,进行垂直方向上的样品转移试验。为此,探月三期工程研制中,针对该验证需求建设了轻小型对接与样品转移机构的地面验证系统,采用等效接口验证方法,模拟三器间相对12自由度的位置姿态、在轨转移时样品容器的失重状态和高低温环境。
样品转移联合验证试验共进行了正常、位置拉偏、载荷拉偏及故障条件下等多个工况验证。通过样品转移联合验证试验,验证了正常情况下主动件中心与样品舱中心位置偏差、负载条件下的样品转移能力,验证了拉偏情况下主动件中心与样品舱中心位置拉偏、负载条件下的样品转移能力;模拟了各产品在轨可能出现的故障情况,对各类故障进行了演练;突破了地面条件下多维、多应力、高精度的对接和样品转移综合验证技术;解决了失重模拟、高精度运动与空间环境耦合下的验证难题。同时建立了对接与样品转移的多学科协同工作平台,为转移机构设计和性能验证提供完整全面的仿真分析手段。
2.7 高超再入地面风洞专项试验
探月三期作为我国首个地外天体采样返回的任务,工程采用了跳跃式再入方式,具有再入速度高、再入航程长、峰值热流密度高、总加热时间长和总加热量大等特点,需要同时解决以近第二宇宙速度进入大气层、跃出大气层及二次再入、长航程精确返回预定落区等问题,对我国再入返回技术提出了新的挑战[6]。
探测器高速再入地球时,气动外形减速是降低进入速度的主要手段。气动减速过程中需要兼顾气动热、气动力、落点散布等约束。为了获取返回器在再入大气过程中的气动力特性数据以及热环境数据,并验证烧蚀材料的烧蚀特性,需要开展大量的气动、烧蚀试验工作,确保研究采用的方法以及模型的正确性,具体包括风洞测力试验、风洞测压试验、风洞测热试验、弹道打靶、自由飞试验、风洞烧蚀试验等。
针对探月三期工程高速再入返回气动设计与验证需求,新建了高频感应加热风洞、高焓激波风洞、低密度风洞系统,开展了多个风洞专项试验。通过飞行试验器在轨飞行,验证、突破了高速再入返回气动设计与验证技术;探索出一套适用于第二宇宙速度再入返回器研制的气动分析与验证途径方法;牵引发展的抗冲刷热流传感器制作工艺、高精度测力试验技术等。该系统可应用于其它复杂外形高超声速飞行器测力、测热试验中。
通过高超再入地面风洞专项试验,获取了第二宇宙速度跳跃式再入气动环境参数,提升了预测方法的精度以及速域、空域的适用范围。
3 结束语
探月工程的实施,用有限的探测次数、较少的投入,实现了中国航天从地球走向深空的跨越,实现了中华民族的千年奔月梦想。月球环绕和着陆巡视探测的任务目标已经圆满完成,月面采样返回的关键技术已经突破,大幅度地提升了中国空间科学的研究水平和技术能力;带动了大型运载火箭、深空测控网的建造,提升了地面高水平专项验证设施研制的能力;拓展了航天技术认知的深度和广度,提升了基础理论水平的发展,取得了技术成果和专利;积累了一套完整的航天重大工程组织管理的经验和方法,为后续深空探测的发展奠定了良好的基础。
本文面向未来深空探测任务发展前景,重点总结分析了探月工程三期牵引发展的运载火箭和探测器系统7项典型大型地面试验验证技术建设和应用情况。所形成的技术和设施成果可针对深空探测任务特别是环绕、着陆、采样返回等任务实施全周期内的各种环境要求开展地面验证试验工作,可验证产品设计方案、工艺方案的正确性和合理性,提前暴露产品在制造质量、材料、工艺方面存在的缺陷,提高火箭发射和探测器在轨工作的可靠性,确保探测任务取得圆满成功、获得第一手有效科学探测数据。
References)
[1] 叶培建, 黄江川, 孙泽洲, 等. 中国月球探测器发展历程和经验初探[J]. 中国科学: 技术科学, 2014, 44(6): 543-558
Ye Peijian, Huang Jiangchuan, Sun Zhezhou, et al. The process and experienced in the development of Chinese lunar probe[J]. Scientia Sinica Technologica, 2014, 44(6): 543-558 (in Chinese)
[2] 叶培建, 孙泽洲, 饶炜. 嫦娥一号月球探测卫星研制综述[J]. 航天器工程, 2007, 16(6): 9-10
Ye Peijian, Sun Zhezhou, Rao Wei. Research and deve-lopment of Chang’e-1[J]. Spacecraft Engineering, 2007, 16(6): 9-10 (in Chinese)
[3] 叶培建, 黄江川, 张廷新,等. 嫦娥二号卫星技术成就与中国深空探测展望[J]. 中国科学: 技术科学, 2013, 43(5): 467-477
Ye Peijian, Huang Jiangchuan, Zhang Tingxin, et al. Technological achievements of Chang’e-2 and consideration for China’s deep space exploration[J]. Scientia Sinica Technologica, 2013, 43(5): 467-477 (in Chinese)
[4] 孙泽洲, 张廷新, 张熇, 等.嫦娥三号探测器的技术设计与成就[J]. 中国科学: 技术科学, 2014, 44(4): 331-343
Sun Zhezhou, Zhang Tingxin, Zhang He, et al. The technical design and achievements of Chang’e-3 probe[J]. Scientia Sinica Technologica, 2014, 44(4): 331-343 (in Chinese)
[5] Ye P J, Sun Z Z, Zhang H, et al. An overview of the mission and technical characteristics of Change’4 lunar probe[J]. Science China Technological Sciences, 2017, 60: 658-667
[6] 杨孟飞, 张高, 张伍, 等. 探月三期月地高速再入返回飞行器技术设计与实现[J]. 中国科学: 技术科学, 2015, 45(2): 111-123
Yang Mengfei, Zhang Gao, Zhang Wu, et al. Technological advancement and promotion roles of Chang’e-3 lunar probe mission[J]. Scientia Sinica Technologica, 2015, 45(2): 111-123 (in Chinese)
[7] 吴伟仁, 于登云. 深空探测发展与未来关键技术[J]. 深空探测学报,2014,1(1):5-17
Wu Weiren, Yu Dengyun. Development of deep space exploration and its future key technologies[J]. Journal of Deep Space Exploration, 2014,1(1):5-17 (in Chinese)
[8] 于登云,林益明,孙泽洲,等. 月球软着陆探测器技术[M]. 北京:国防工业出版社,2016
Yu Dengyun,Lin Yiming,Sun Zezhou, et al. Technology of lunar soft lander[M]. Beijing: National Defense Industry Press, 2016 (in Chinese)
[9] 褚桂柏, 张熇. 月球探测器技术[M]. 北京:中国科学技术出版社,2007
Chu Guibai, Zhang He. Lunar probe technology[M]. Beijing: China Science and Technology Press, 2007 (in Chinese)
猜你喜欢
学与玩(2022年6期)2022-10-28
军事文摘(2022年12期)2022-07-13
飞碟探索(2022年1期)2022-03-12
军事文摘(2021年18期)2021-12-02
金桥(2021年1期)2021-05-21
初中生世界·七年级(2021年3期)2021-05-14
学苑创造·A版(2020年10期)2020-11-06
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
英语文摘(2019年4期)2019-06-24