
火星遥感制图技术回顾与展望
2018-02-28 00:42:36邸凯昌刘斌刘召芹
航天器工程 2018年1期
邸凯昌 刘斌 刘召芹
(中国科学院遥感与数字地球研究所,遥感科学国家重点实验室,北京 100101)
火星是太阳系中最类似地球的行星,对火星的探测不仅能大大深化人类对行星起源和演化的科学认识,更是人类寻找宇宙生命的第一步。自1960年开始,以美国、苏联和欧盟为主,对火星进行多种探测,到目前为止,全世界共发射了44颗火星探测器,成功率不到一半。成功的探测任务获取了火星表面大量遥感影像,目前部分任务仍然在运行并获取数据。这些获取的遥感数据在任务期间和任务结束以后广泛应用于火星科学研究,取得了重要的工程进展和大量科研成果。美国国家航空航天局(NASA)在2015年召开新闻发布会,宣布了火星存在液态水的间接证据[1],再次激发了人们对火星探测的期待和热情。
目前,火星探测的方式均为无人探测,尚未实现载人登陆探测。无人探测主要有轨道器的飞越和环绕,以及软着陆下的着陆器和巡视器(火星车)两大类探测方式。轨道器环绕火星运行,所搭载的光学相机、光谱仪和激光高度计等科学仪器对火星进行宏观的大区域和全球性探测。在选定的具有科学意义和工程安全性的有限区域内进行着陆和巡视探测,获取更精细的就位探测结果,并为轨道器数据标定和验证提供参考。
火星遥感制图是火星科学研究和探测工程任务不可或缺的基础性工作,是获取火星形貌和构造信息的基本手段,对于研究火星的形貌特征、地质构造及其演化历史具有重要的科学意义。同时,探测工程任务和科学目标的制定、着陆区选择、着陆后探测目标的选择及高效安全探测等都有赖于遥感制图,特别是高精度三维制图的成果及技术支撑。由于受火星轨道器的轨道和姿态测量精度低、难以获得控制点、无卫星导航定位设施、表面环境荒芜等条件限制,火星遥感制图与对地观测制图相比,具有更大的挑战和难度。
本文对国际火星探测任务中的火星遥感制图技术及制图成果进行综述,并对其发展趋势和重要研究方向进行探讨。但所综述的遥感制图聚焦在测绘制图技术及其产品,包括影像拼图、正射影像图、数字高程模型、坡度坡向等专题产品,不涉及地质填图、地貌图制作等内容。
1 火星探测概述
1.1 火星探测任务统计
1960年至今,全世界已开展了44次火星探测工程任务,其中18次成功,3次部分成功[2]。火星探测任务中,环绕探测所占比重最大,共23次,成功10次,巡视探测所占比重最少,共6次,成功4次。这是由于相对早期的飞越探测,环绕探测所能获取的科学价值更大;而巡视探测能获得更精细的科学价值,但是工程难度却最大。从任务成功率来看,飞越探测、环绕探测、着陆探测和巡视探测成功率逐步增加,虽然这些探测的工程难度是逐步增大的,但是飞越探测主要发生在火星探测早期(20世纪60-70年代),受限于当时的技术水平及对外太空环境的了解程度,工程成功率很低;而着陆探测和巡视探测大多发生在20世纪90年代以后,技术水平和对外太空环境的认识都有较大提升,因此工程成功率也逐步提高。
从任务时间维度划分,可以将火星探测分为20世纪90年代前的探测与20世纪90年代以后的探测。由图1可见[3],20世纪90年代前的探测主要发生在1960-1975年间,分别由美国和苏联实施。这部分探测以工程尝试探索为主,探测方式主要为飞越、环绕和少部分小型的着陆,总体上探测失败率非常高;而20世纪90年代以后,火星探测出现了一个新的高潮,探测则逐渐以科学研究为导向,这期间发射成功了大量卓有成效的探测器。这些探测主要以环绕和着陆探测为主,特别是21世纪出现了多次非常成功的着陆巡视探测,为人类认识火星提供了珍贵的就位探测资料。随着任务的科学导向,工程难度也逐步增加,然而由于科技水平和对外太空环境认知水平的提高,任务的成功率也在提升,这种提升在21世纪尤为明显。
我国于2016年1月11日对火星探测任务批准立项,计划于2020年对火星一步实现绕、落、巡探测。2018年NASA将执行洞察号(Insight)和火星立方体一号(Mars Cube One)两个火星探测任务,分别进行着陆和飞越探测。在2020年的发射窗口,除中国外,NASA、欧洲航天局(EAS)也将发射火星着陆巡视器,阿拉伯联合酋长国将发射火星轨道器。届时,将会有多个轨道器和着陆巡视器同时探测火星,火星探测将迎来一个新的高潮。一些商业公司,如Space X公司近年来也关注火星探测,并计划在几年内登陆火星。
下文以20世纪90年代为界,对前后两个时期主要的探测任务进行介绍。
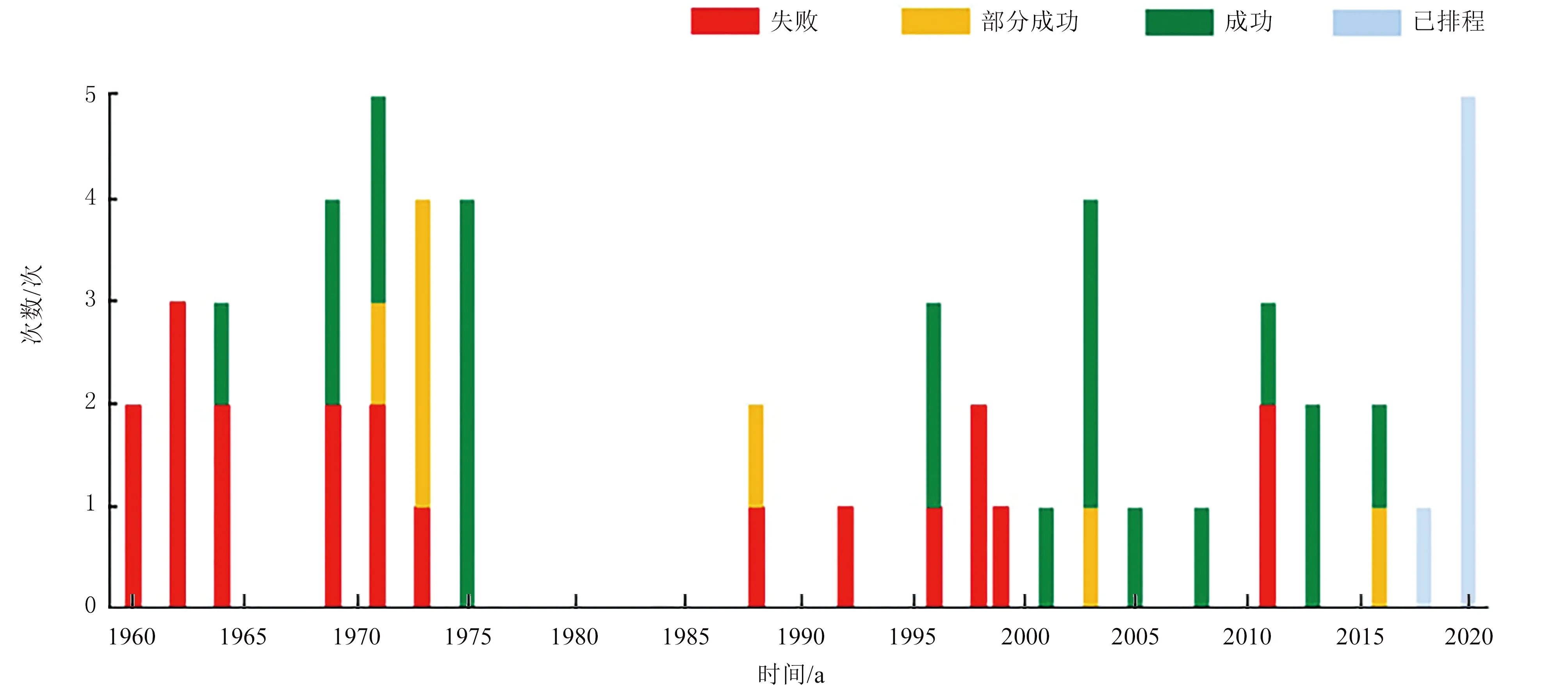
图1 火星任务年度统计Fig.1 Yearly statistics of Mars missions
1.2 20世纪90年代以前的火星探测
20世纪90年代以前的火星探测,主要集中在1960-1975年间,1975年到1988年间没有火星任务。这期间的火星任务中,美国的海盗号(Viking)任务是获取数据最多,科学价值最大的任务。海盗号包括海盗1号(Viking-1)与海盗2号(Viking-2)两个探测器,均包括轨道器与着陆器,主要科学任务是获取火星表面高分辨率影像、探测火星大气结构及组成和探索火星上是否存在生命迹象[4-6]。Viking-1于1975年8月20日发射,1976年6月19日进入火星轨道,其着陆器在1976年7月20日在火星克里斯平原(Chryse Planitia)着陆,首次从火星表面获取大量图像和探测数据。Viking-2于1975年9月9日发射,1976年8月7日进入火星轨道,其着陆器在1976年9月3日在火星乌托邦平原(Utopia Planitia)着陆。Viking任务的轨道器搭载的主要科学仪器有:两个光导摄像管相机,合称为可见光成像子系统(VIS)、红外光谱仪、红外辐射热量制图仪;着陆器搭载的主要科学仪器有:生物学仪、气相色谱/质谱仪、X射线荧光光谱仪、地震仪、气象仪、立体彩色相机、土壤分析仪、火星大气成分分析仪[6]。从1976至1982年,Viking-1和Viking-2轨道器共获取了5万多幅VIS影像,覆盖火星全球,分辨率为7~1400 m,超过一半的图像分辨率优于100 m。
1.3 20世纪90年代后的火星探测
20世纪90年代后的火星探测技术逐渐走向成熟,工程成功率稳步提升的同时,科学价值也有显著地增加。如NASA的火星全球勘探者(Mars Global Surveyor,MGS)轨道器,执行一个任务所获取的影像数据便多于以前所有任务所获取数据的总和。下文以时间顺序介绍20世纪90年代后较为重要的火星探测任务。
(1)火星全球勘探者(MGS)号轨道器于1996年11月发射,1997年9月成功进入火星轨道[7]。该轨道器的主要科学任务是:研究火星表面特征及地质过程;确定表面矿物和岩石的成分、分布和物理特性,确定火星全球地形、形状和重力场;研究火星全球磁场,探测火星天气和大气层热结构;研究火星表面与大气的交互作用。它搭载的主要科学仪器有:火星轨道器相机(MOC)、火星轨道器激光高度计(MOLA)、热辐射光谱仪(TES)、磁力仪与电子反射仪、无线电科学实验超稳定振荡器等。MGS一直在轨运行至2006年11月,在9年多的探测过程中,获取了海量中高分辨率影像、光谱和地形数据。MOC宽角相机影像(分辨率240~7500 m)多次重复覆盖火星全球,窄角相机影像分辨率为1.5 ~ 12 m,覆盖火星表面5.45%的面积[8]。MOLA测距分辨率为37.5 cm,垂直精度优于1 m,激光点间距沿轨道方向300 m,跨轨方向4 000 m,由MOLA数据生成的火星全球地形模型被广泛应用[9-10]。
(2)NASA的火星探路者(Mars Pathfinder, MPF)号着陆器于1996年12月4日发射,1997年7月4日登陆火星Chryse Planitia的阿瑞斯谷(Ares Vallis)地区[11]。该着陆器的主要科学任务是:调查火星大气、地表矿物与地质,描绘火星地表特征,分析着陆点的岩石和土壤成分,监测火星大气变化。它携带的索杰纳号巡视器(Sojourner Rover)是人类送往火星的第一部火星车。探路者号着陆器上安装的主要科学仪器有:立体相机、大气结构与气象探测仪等,巡视器上的科学仪器有:3台导航相机(两台安置在前部、一台安置在后部)和α质子X射线光谱仪。
(3)火星奥德赛(Mars Odyssey, MO)号是NASA于2001年4月7日发射的轨道器,2001年10月24日进入火星轨道[12]。其主要科学任务是:确定火星表面化学元素丰度和矿物组成与分布,获取表面矿物的高空间分辨率与高光谱影像,获取火星表面形态信息,表征火星附近的空间辐射环境与辐射诱发的人类探索风险。它所搭载的科学仪器有:热辐射成像系统(THEMIS),伽马射线光谱仪(GRS),火星环境辐射探测仪。GRS是一套三个仪器:伽玛子系统、中子谱仪和高能量中子探测器。THEMIS影像可见光为5个波段、分辨率为18 m,红外10个波段,分辨率为100 m[13]。
(4)火星快车(Mars Express, MEX)是ESA研制的第一个火星探测器,于2003年6月2日发射,2003年12月25日进入火星轨道[14]。它包括一个轨道器与一个着陆器,其中着陆器任务失败。该探测器的主要科学任务是:获取火星全球彩色及立体高分辨率影像,并以超高分辨率对特定区域进行拍照;研究火星全球矿物分布;探测火星浅层地下构造;测定大气环流与大气成分;研究大气与火星表面和星际介质的相互作用;推断火星大气、电离层、表面和内部结构信息。轨道器上搭载的科学仪器有:高分辨率立体相机(HRSC),光学与红外矿物光谱仪(OMEGA),紫外与红外大气光谱仪,地下探测雷达高度仪,行星傅立叶光谱仪,太空等离子与高能原子分析仪,火星无线电科学实验仪。HRSC影像分辨率达10 m,其超分辨率通道分辨率达2 m,获取了火星表面可见光和近红外9个波段的影像数据;高光谱探测仪OMEGA获取了火星表面352个波段的光谱信息,是研究火星表面成分特征的重要数据源。
(5)火星探测车(Mars Exploration Rover, MER)任务是NASA于2003实施的火星着陆和巡视探测任务,包括勇气号(Spirit)和机遇号(Opportunity)两辆相同的火星车;勇气号于2003年6月10日发射,2004年1月3日登陆火星表面古谢夫撞击坑(Gusev Crater);机遇号于2003年7月7日发射,2004年1月25日登陆火星表面位于子午高原(Meridiani Planum)的老鹰撞击坑(Eagle Crater)[15-17]。火星车的主要科学任务是:①搜索保存过去水活动迹象的岩石和土壤样品,特别是那些与水相关的过程产生的沉积矿物;②探测着陆区周围的矿物组分与分布;③探测形成着陆区当地地形地貌和化学成分的地质活动;④验证火星轨道器对火星表面观测的准确度与精度;⑤搜寻含铁矿物,识别并定量分析特定的含水或水成矿物的相对含量;⑥刻画岩石和土壤的矿物成分和描述纹理特征以确定其成因;⑦寻找液态水存在的环境条件及其地质线索,评估这些环境能否有利于支持生命的存在。其搭载的主要仪器有:全景相机(Pancam)、导航相机(Navcam)、避障相机(Hazcam)、α粒子X射线光谱仪(APXS)、穆斯堡尔光谱仪(MB)、岩石打磨工具(RAT)、微型热辐射光谱仪(Mini-TES)、显微成像仪(MI)。其中,Pancam和Navcam立体影像广泛应用于火星车行驶路径上的地形制图和火星车导航定位[16-19]。
(6)凤凰号(Phoenix)着陆器由NASA于2007年8月4日发射,2008年5月25日登陆火星北极附近的绿谷地区(Green Valley),主要科学任务是:研究火星北极地区水的历史,寻找适合微生物生命生存的环境[20]。其上搭载的主要科学仪器有:机械臂(RA)、机械臂相机(RAC)、表面立体成像仪(SSI)、热量和逸出气体分析仪(TEGA)、火星降落成像仪(MARDI)、显微镜电化学与传导性分析仪(MECA)、气象站(MS)。
(7)火星勘测轨道器(Mars Reconnaissance Orbiter,MRO)是NASA于2005年8月12日发射的火星探测器,2006年3月10日进入火星轨道。其主要科学任务是:获取火星表面高分辨率影像为未来着陆任务选址,研究火星气候、地质特征,探索极地冰盖中是否有液态水存在提供数据参考[21]。其搭载的主要仪器有:高分辨率成像科学实验相机(HiRISE),背景相机(CTX),火星彩色相机(MARCI),紧凑型火星侦察成像光谱仪(CRISM),火星气候探测器(MCS),浅地层雷达(SHARAD)。HiRISE影像的分辨率高达0.25 m,CRISM则提供了544个波段分辨率为18 m的高光谱数据,它们为研究火星表面形貌、矿物成分、气候变迁、火山活动、水的存在形式等提供了必备的数据。
(8)好奇号(Curiosity)火星车是NASA“火星科学实验室”(Mars Science Laboratory,MSL)任务的主要组成部分,于2011年11月26日发射,2012年8月6日成功登陆火星盖尔撞击坑(Gale Crater)。科学任务包括:①确定火星表面有机碳化合物的性质和类别;②调查火星表面构成生命基础的元素(碳,氢,氮,氧,磷和硫);③识别可能代表了受生物过程影响的土壤和大气特征;④调查火星表面的化学成分、同位素和矿物组成的近地表物质,解释成岩成土过程;⑤评估4亿年来火星大气的演化过程;⑥确定水和二氧化碳目前的状态、分布和循环过程;⑦研究火星表面辐射特性,包括银河系的辐射、宇宙辐射、太阳质子事件和次级中子[22]。其搭载的主要科学仪器有:桅杆相机(MastCam)、化学相机(ChemCam)、导航相机、避障相机、降落相机(MARDI)、APXS、化学和矿物学分析仪(CheMin)、火星样本分析设备(SAM)、中子反照率动态探测器(DAN)、火星手持成像仪(MAHLI)、巡视器环境监测站(REMS)、除尘工具(DRT)、辐射评估探测器(RAD)。
(9)火星大气和挥发演化(Mars Atmospheric and Volatile EvolutioN,MAVEN)任务是第一个直接测量火星大气的轨道器任务。NASA于2013年11月18日发射,2014年9月22日进入轨道,MAVEN携带了8种科学仪器:磁力仪(Magnetometer)、中性气体和离子质谱仪(NGIMS)、朗缪尔探针和波探测仪器(LPW)、紫外成像光谱仪(IUS)、太阳风电子分析仪(SWEA)、太阳风离子分析仪(SWIA)、太阳能量粒子探测仪(SEP)、超热和热离子组成分析仪(STATIC)。它们正在对火星上的大气层进行测量。MAVEN可以降落到离火星约129 km的高空,采样火星上的整个大气层的样本,还能为火星上的着陆器和巡视器提供通信支持。
(10)ESA的“生物火星”(ExoMars)探测器计划是一系列任务,用来认识和探测火星曾经或现在是否存在生命。其中第一个任务是气体探测轨道器(Trace Gas Orbiter,TGO),于2016年3月14日发射,2016年10月19日入轨。该任务主要为探测火星大气层中甲烷及其他可能存的小浓度气体。该任务还有一个进入大气层、下降和着陆(EDL)模块,但是在进入火星大气层后,预期着陆前TGO与ESA失去了联系,着陆失败。
2 火星遥感制图技术
2.1 火星坐标系统建立
火星的全球坐标系分为惯性坐标系和星固坐标系两类,惯性坐标系用于确定探测器的位置和姿态,星固坐标系用于对火星表面特征进行定位和制图,星固坐标系又分星固直角坐标系和星固大地坐标系。
J2000火星星心惯性坐标系,又称J2000火星星心平地球赤道坐标系,以火星质心为原点,X、Y、Z三轴指向分别平行于J2000地心惯性坐标系X、Y、Z三轴指向的右手直角坐标系。
火星星固直角坐标系(简称火星星固坐标系)以火星质心为原点,火星赤道面为基本平面,X轴在基本平面内指向本初子午线与基本平面的交点,Z轴垂直于基本平面指向北极,Y轴与X轴和Z轴组成右手直角坐标系。火星的本初子午线定义为过艾里-0(Airy-0)撞击坑(直径约500 m)中心的经线[23]。J2000火星星心惯性坐标系与火星星固直角坐标系关系如图2所示。
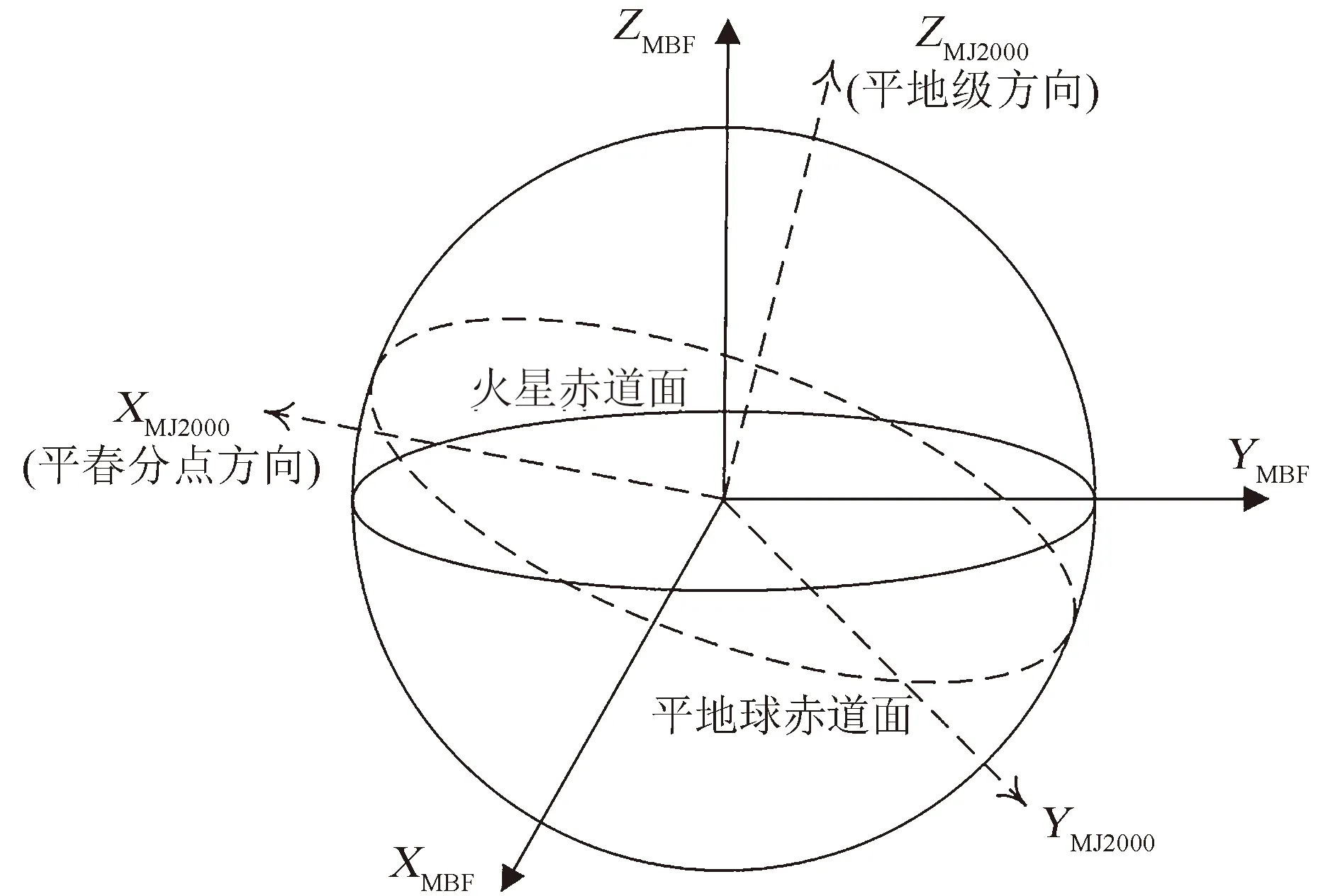
注:图中XMBF、YMBF、ZMBF分别为火星星固坐标系3个坐标轴的指向,X MJ2000、YMJ2000、ZMJ2000为火星星心惯性坐标系3个坐标轴的指向。 图2 火星坐标系统示意图Fig.2 Mars coordinates systems
火星星固大地坐标系(又称火星大地坐标系)以火星质心为原点,火星赤道面为基本平面,用大地经度、大地纬度和大地高表示火星表面点位置的坐标系。常用的火星参考椭球有旋转椭球体和正球体,旋转椭球体的赤道半径为3 396.19 km、极半径为3 376.20 km,正球体的半径为3 389.50 km[24-25]。与两种参考椭球体相对应,火星大地坐标系分为两种:一是采用地理纬度和向西为正的经度的椭球体大地坐标系;二是采用球心(火星质心)纬度和向东为正的经度的球体大地坐标系。以往的火星制图常用前一种大地坐标系;随着MOLA数据采用球心纬度和向东为正的经度,并且由于MOLA数据作为目前精度最高的全球高程控制数据的广泛应用,火星球体大地坐标系开始得到更普遍的使用。大地高定义为火星表面点沿法线方向到参考椭球面的距离,当参考椭球面为正球体表面时,火星表面点半径减去火星正球体半径即得到大地高。
2.2 全球控制网建立
火星全球控制网即分布在火星全球表面的具有精确三维坐标的控制点集,它们是火星探测中定位和制图的控制基准。目前,国际上通用的火星全球控制网是美国地质调查局(USGS)建立的火星MIDIM 2.1控制网,它是在早期火星控制网的基础上[26-27],升级改进得到的一个基于摄影测量区域网平差的火星全球控制网,包含了1054幅美国水手9号(Mariner-9)和5317幅Viking轨道器影像,选择了37 652个影像控制点,见图3(a),它们至火星质心的半径值通过MOLA数据内插得到,并在控制网迭代解算过程中,根据MOLA先验精度加以限制;另外还选取了1232个MOLA控制点,见图3(b),它们的平面位置在迭代解算过程中固定不变,控制网解算的精度(残差均方根误差)为Viking影像1.3像素、火星表面280 m[28]。MIDIM 2.1火星全球控制网的输入输出及解算过程文件可以从USGS的网站上下载[29]。
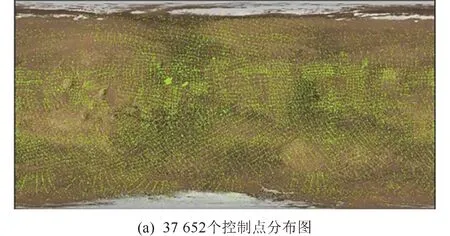
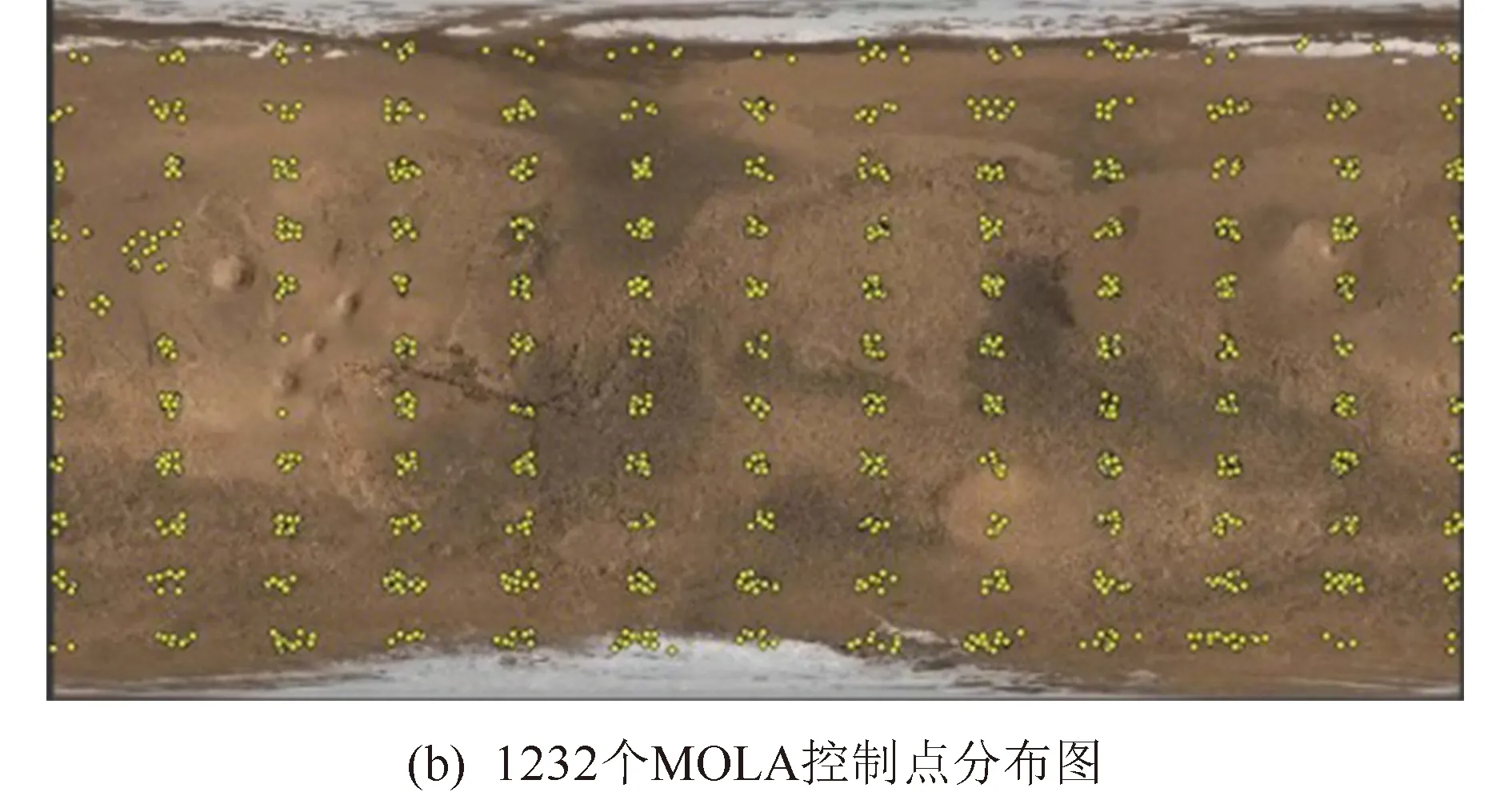
图3 MDIM2.1火星全球控制点分布图Fig.3 Distribution of control points of MDIM 2.1
2.3 轨道器遥感影像的摄影测量处理技术
火星遥感影像制图技术中,轨道器影像的摄影测量几何处理技术尤为关键,包括成像几何模型的建立、影像匹配与链接点选取、光束法平差、生成数字高程模型(DEM)和数字正射影像图(DOM)等技术环节。USGS的Kirk等人[30]对MOC窄角影像进行了光束法平差,制作了勇气号、机遇号火星车着陆区及部分候选着陆区的高分辨率DEM和DOM[30-31]。HRSC团队对HRSC影像数据进行了一系列摄影测量处理,分别生成标定后影像数据Level-2、地图投影影像数据Level-3、DEM 3D数据Level-4、DOM影像数据Level-4等[32]。柏林工业大学的Albertz等人对HRSC影像建立了光束法平差模型,对外方位元素进行常差改正,并将MOLA数据加入到平差之中,将物方的不一致性从水平方向的10~18 m、高程方向的35~39 m降低到水平方向的4~7 m、高程方向的11~15 m[33]。USGS使用自己研发的ISIS软件,对HiRISE影像进行辐射校正、几何投影(包括去除卫星姿态颤振的影响),并将多个CCD影像拼接成一幅影像,转入摄影测量软件SOCET SET中进行处理,SOCET SET对HiRISE拼接影像进行光束法平差、匹配、DEM生成和编辑等处理[34]。Kim等人以光束法平差处理后生成的HRSC正射影像作为地面控制基准,对MOC窄角影像进行了非严格的几何建模并进行了校正[35],并用一种基于非严格传感器模型对HiRISE影像进行处理,利用HRSC立体影像派生出的地面控制数据为基准,生成了高分辨率DEM[36],进一步地以MOLA数据生成的DEM为基准,对HRSC、CTX、HiRISE三种数据立体影像各自生成的DEM进行面匹配,从而实现了对火星多个拟着陆区地形数据的配准融合[37]。NASA的Ames实验室团队使用Ames Stereo Pipeline软件对多个区域的HiRISE CCD影像进行光束法和影像匹配,生成DEM和正射影像[38-39]。俄亥俄州立大学的Li等人[40]以单个CCD为处理单元建立了严格几何模型,在立体影像间以及单个CCD之间的重叠区间自动选取连接点,通过光束法平差,将像方误差由4.4个像素降低到0.85个像素,并生成了勇气号火星车着陆区的高分辨率无缝DEM和正射影像。我国解放军信息工程大学[41-42]、香港理工大学[43]、中国科学院遥感与数字地球研究所[44-46]等团队也对火星制图中遥感数据制图技术进行了研究。
2.4 着陆器与巡视器影像的摄影测量处理技术
火星着陆与巡视器摄影测量处理技术,主要集中体现在火星探路者号(MPF)和勇气号与机遇号火星车(MER)任务中,好奇号火星车影像的摄影测量处理基本上沿用了MER影像处理的方法。针对MPF任务数据,Kirk等人[47]开发了基于相机与光谱仪数据处理集成软件ISIS和摄影测量软件SOCET SET相结合的MPF着陆器立体全景影像摄影测量处理流程,包括立体相机相对定向、全景影像网平差、三维地形制图等过程;Di等人[48]提出了一种基于连接地面影像(着陆器影像和巡视器影像)的影像网平差方法,实现了着陆区的制图与巡视器的定位。在MER火星车探测任务中,火星车所携带的导航、全景和避障立体相机展现了对火星表面环境及科学目标精细制图的能力,NASA的喷气推进实验室(Jet Propulsion Laboratory, JPL)开发了以火星车站点为单元的摄影测量处理流水线,自动生成了多种类型和规格的地形制图产品,如DEM、DOM、坡度图、深度图、表面法向量图、表面粗糙度图等[49];俄亥俄州立大学制图与地理信息系统实验室开发了基于火星车影像光束法平差的一系列摄影测量技术,将火星车行驶路径上不同站点获取的影像连接起来用于大区域的高精度地形制图和火星车全程定位[50-53],在MER任务实施过程中,这些制图产品与火星车定位信息一起直接用于火星车的路径规划,也广泛用于对探测区域和目标的科学研究。Olson和Abi-Rached[54]研究了面向地形测图的长基线立体视觉方法;Di和Peng[55]研究了火星车长基线测图的理论精度,并开发了长基线三维测图的方法。
值得一提的是,勇气号和机遇号火星车上的显微图像也被应用于立体地形制作[56],这些显微图像广泛应用于研究火星土壤和岩石的颗粒与精细结构,产生显著的科学价值,值得我国未来月球车和火星车借鉴参考。
3 火星遥感制图产品
3.1 火星全球制图产品
1)全球影像制图产品
美国地质调查局利用4600余幅Viking图像在摄影测量平差的基础上,制作了火星全球数字影像拼图(MDIM),分辨率为256像素/(°)(赤道上相当于约230 m/像素),其最新版本是2005年发布的MDIM-2.1[28]。MOC相机的研制者马林空间科学系统公司(MSSS)利用MOC宽角影像制作了分辨率为256 像素/(°)的火星全球影像拼图[57-58]。火星奥德赛[12]所搭载的热辐射成像系统(THEMIS)影像可见光有5个波段,分辨率18 m,红外10个波段,分辨率100 m[13],NASA分别在2006年与2010年发布了256像素/(°)与593像素/(°)(赤道上相当于约100 m/像素)的白天和晚上THEMIS热红外波段(12.57 μm)全火星影像镶嵌图,供火星研究者下载使用[59]。
2)全球地形制图产品
NASA戈达德航天中心(Goddard Space Flight Center, GSFC)及相关团队利用MOLA,从1999年至2001年获取的6亿多个激光测高点经过了轨道交叉点平差[10,60],制作了分辨率为128像素/(°)(赤道上相当于463 m/像素)的火星全球DEM(如图4所示),MOLA DEM在火星科学研究中被广泛应用,并常用作影像制图的控制基准。

图4 MOLA数据全球DEM产品Fig.4 Global DEM product from MOLA data
ESA火星快车探测器上搭载的高分辨率立体相机(HRSC)已获取了超过12 334轨数据,其中平均分辨率18.3 m的覆盖区超过火星全球表面的95.4%,而分辨率在54 m以内的覆盖度达到99%[61],由于相机的多线阵推扫式的设计[62],使得该数据能通过立体摄影测量处理,获取火星表面的三维地形信息。HRSC仪器科学团队正拟使用该数据生成火星全球50 m 数字地形模型(DTM)和12.5 m的DOM,根据该团队最新报告,已生产出MC-11-E区(USGS将火星分为30个投影区,MC-11-E为第11区的一部分,分区详细情况参见文献[63]的高分辨率DTM与DOM[64]。
3.2 火星局部高分辨率制图产品
1)轨道器影像局部高分辨率制图产品
多个探测任务团队及相关科研团队已经利用轨道器影像制作了大量的局部区域高分辨率DEM和DOM,主要包括火星候选着陆区以及有显著科学价值的区域,所采用的高分辨率图像有MOC窄角相机影像(分辨率1.5~3 m)、HRSC影像(分辨率10 m和2 m)、CTX影像(分辨率10 m)和HIRISE影像(分辨率0.25 m)。
在火星探测及科学研究任务过程中,从着陆点的选择到着陆点定位及地形地貌定量分析均离不开高精度的地形信息,特别是高分辨率DEM的支持。Kirk等人利用MOC窄角相机影像生成预选着陆区的高精度数字高程模型用于着陆区的选择,提供地形及坡度信息用于火星探测任务着陆安全性评估,MOC立体像对生成DEM的平面分辨率达到3个像素(10 m/pixel),高程精度达到0.22像素匹配误差,坡度误差1°~3°[30-31]。
另外,USGS和俄亥俄州立大学制图与地理信息系统实验室,利用HiRISE立体影像生成了勇气号着陆区的正射影像及数字高程模型,用于着陆点的定位和制图。图5为勇气号着陆区一对HiRISE立体影像,分辨率为0.26 m和0.27 m,立体交会角为19.8°;图6为利用立体影像生成的DEM三维渲染图;图7为正射影像叠加到DEM上的三维渲染图(高程夸大系数为2)[40]。
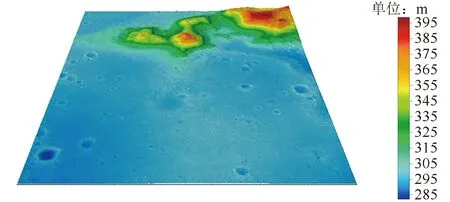
注:图中不同颜色代表不同高程。图6 HiRISE立体影像生成的勇气号着陆区DEMFig.6 DEM of the Spirit rover landing site generated from HiRISE stereo images
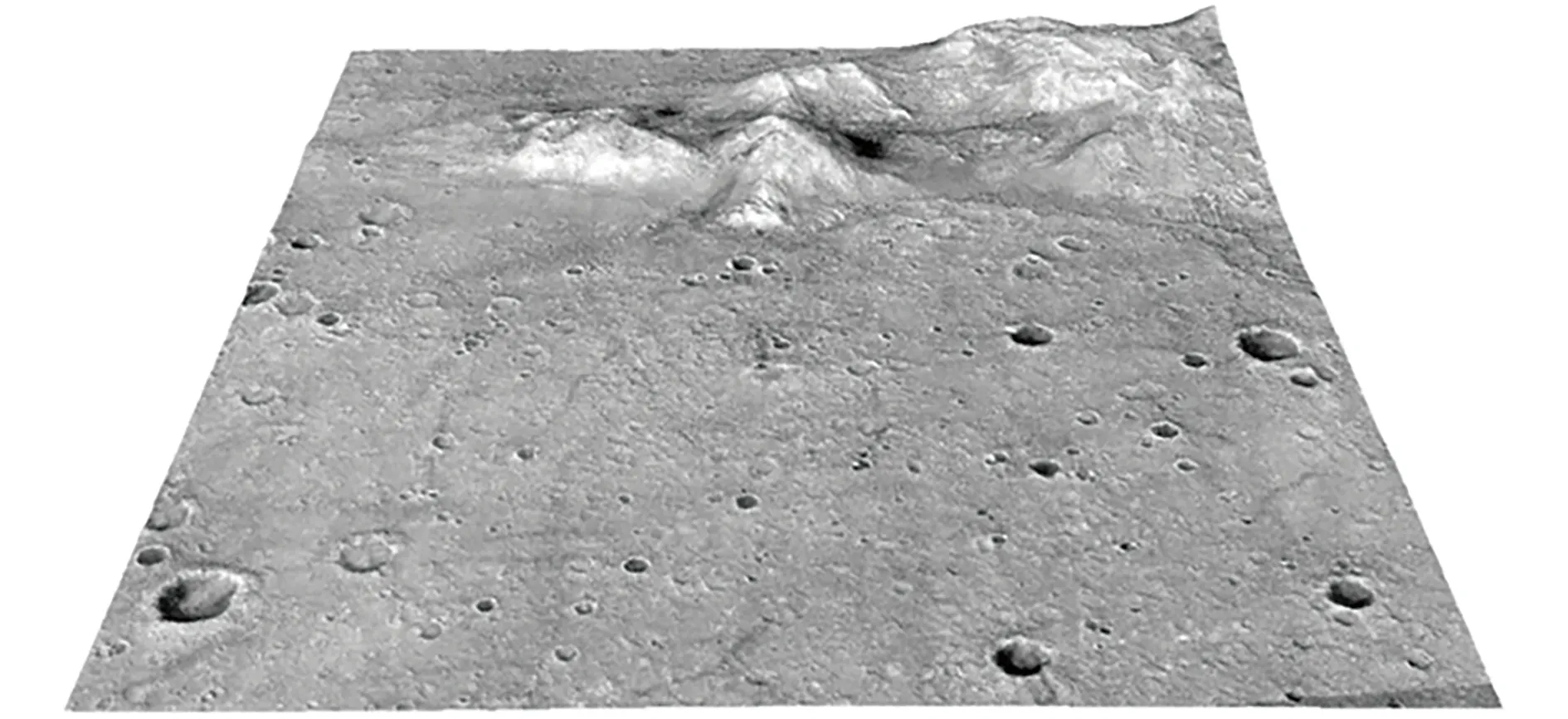
图7 HiRISE立体影像生成的勇气号着陆区DOM叠加在DEM上显示 Fig.7 HiRISE DOM the Spirit rover landing site draped on the corresponding DEM
目前,分辨率最高的火星轨道器影像是HiRISE影像,迄今为止,美国亚利桑那大学的HiRISE团队陆续生产和发布了400多个局部区域的DTM产品及相对应的DOM产品,DTM分辨率高达1 m,DOM分辨率高达0.25 m,可在HiRISE官方网站下载[65]。
2)着陆与巡视器制图产品
火星车导航定位和制图的业务化运行过程可以用空间数据处理的周期来描述,一个周期即一个火星日(称为sol,比24 h的地球日长约40 min)。首先,火星车根据上传的工作计划行驶到感兴趣的区域或目标,获取图像及其它数据,并传输到地球的深空网;JPL的多任务图像处理实验室(MIPL)对接收的数据进行预处理,生成一系列的制图和定位产品供火星车遥操作操作团队使用[49],并将数据和处理结果分发到有关的大学和研究中心,进行进一步的多种科学和工程分析。
MIPL火星车数据预处理产品包括多级数据产品,火星车原始数据经无线电下传后由MIPL快速解码生成0级数据产品(EDRs),由EDRs进一步生成的系列产品称为简化数据记录产品(RDRs)。RDRs又分为三类:单影像派生产品、立体影像派生产品、多影像产品[49]。图8展示了典型的立体影像派生产品。图8(a)为XYZ(X—红,Y—绿,Z—蓝)影像产品,等高线为0.1 m间隔;图8(b)为距离图,等高线为0.1 m间隔;图8(c)为表面法向量产品图;图8(d)为可通达图;图8(e)为坡度图,蓝色表示平坦,红色表示陡峭;图8(f)为太阳能量图,蓝色表示多,红色表示少[49]。
俄亥俄州立大学制图与地理信息系统实验室在光束法平差的基础上,进一步生成单站点或多站点拼接的DEM、DOM、坡度图、坡向图、等高线图及三维渲染图等,用于火星车探测的科学和工程任务。图9为勇气号火星车着陆区的Methuselah岩石露头的DEM三维显示,图10为对应的DOM,它们由勇气号火星车全景相机影像生成[18]。
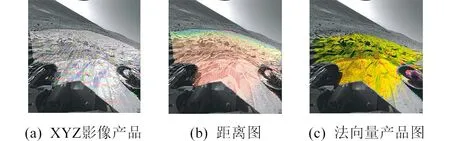
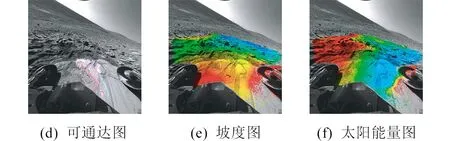
图8 叠加到避障相机影像上的制图产品Fig.8 Mapping products overlaid on Hazcam image
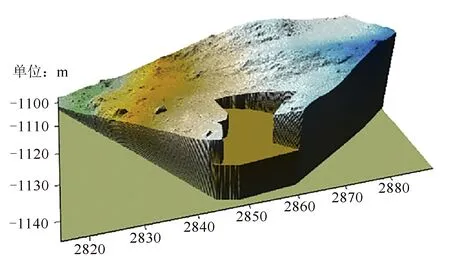
图9 勇气号着陆区Methuselah岩石露头DEMFig.9 3D view of the DEM of Methuselah outcrop at the Spirit landing site
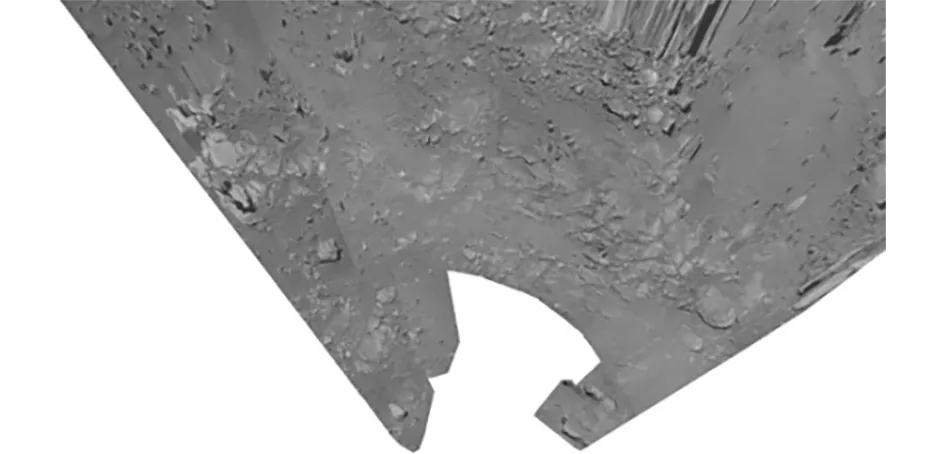
图10 勇气号着陆区Methuselah岩石露头DOMFig.10 DOM of Methuselah outcrop at the Spirit landing site
图11为Endurance陨石坑DEM的三维显示[53],图12为其等高线图[53]。图9、11、12的坐标均为着陆区局部坐标。由于该陨石坑直径为156 m,用一个摄站的Pancam全景立体图像无法精确测绘距离远的一侧坡上的地形。为解决这一问题,应用了4个摄站的影像数据集成测图(图11中标有摄站位置),一是在西部边缘所拍摄的Pancam全景立体图像,二是在东南部边缘所拍摄的Pancam全景立体图像,另外两组数据是在陨石坑底部两个位置拍摄的Pancam全景单幅图像,它们构成长基线立体像对进行三维测图。多摄站集成测图的关键是对所有有关图像进行光束法平差,以提高测图精度和一致性。如此生成的Endurance陨石坑DEM在选择火星车进坑、坑内行驶和出坑路径以及在对该陨石坑详尽的科学研究中都发挥了重要的作用[53]。
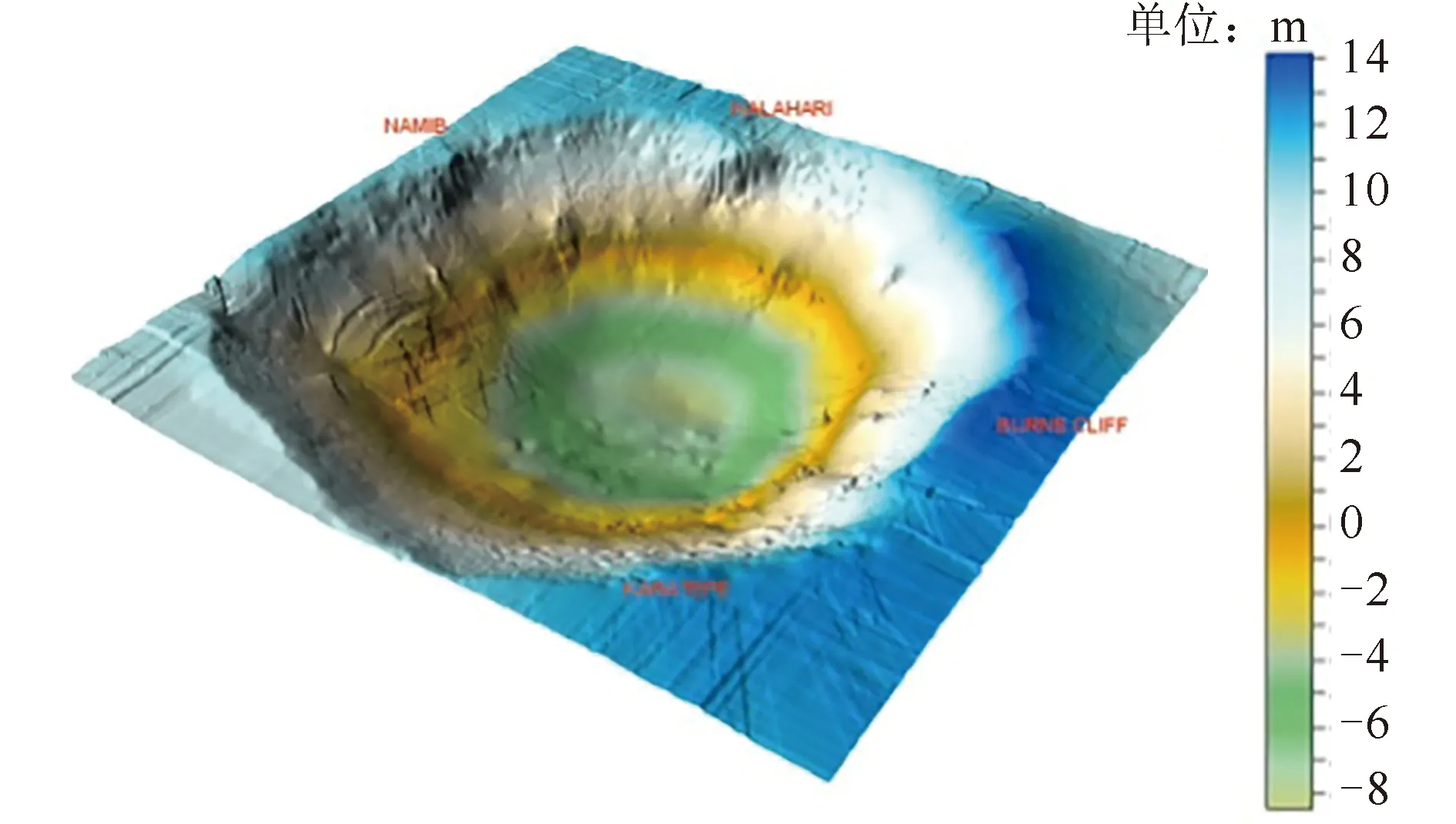
图11 Endurance陨石坑DEM三维透视图Fig.11 3D view of the DEM of Endurance crater
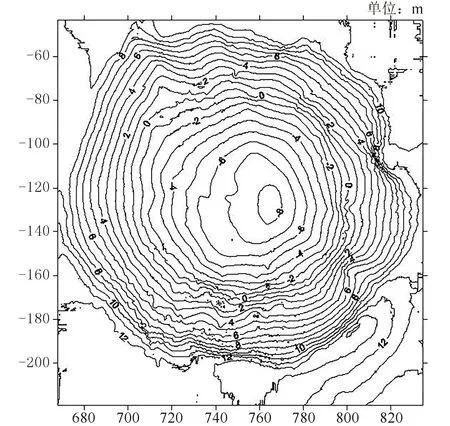
图12 Endurance 陨石坑等高线图Fig.12 Contour map of Endurance crater
图13是Husband山顶DEM、等高线和火星车路径的三维显示,上面叠加等高线及行驶路线[18]。此DEM是从第576到609个火星日,由勇气号火星车用Navcam和Pancam在多个摄站拍摄的全景立体图像,经平差后综合处理而成,覆盖230 m×180 m的范围,DEM地面分辨率为0.5 m[18]。该DEM和派生出的等高线图和坡度图在规划到山顶和内盆地的路径时发挥了重要作用。
为使勇气号火星车在当地冬天时能够得到充分的太阳照射而保持足够的电能,专门制作了向北坡度图来表征在南北方向上的坡度。图14是在Husband山顶、内盆地和“本垒”(Home Plate)地区的向北坡度图[66],其中背景图是用轨道器图像生成的向北坡度图,中心的小图由火星车图像生成。由于勇气号和机遇号火星车在赤道以南,朝北的坡即为向阳坡。向北坡度图与一般坡度图相结合选取从Husband 山顶经过内盆地到“本垒”的路径,既保证了勇气号行驶在安全的坡度上不致翻车,又保证行驶在向阳的坡度上获取足够的太阳能度过冬天。
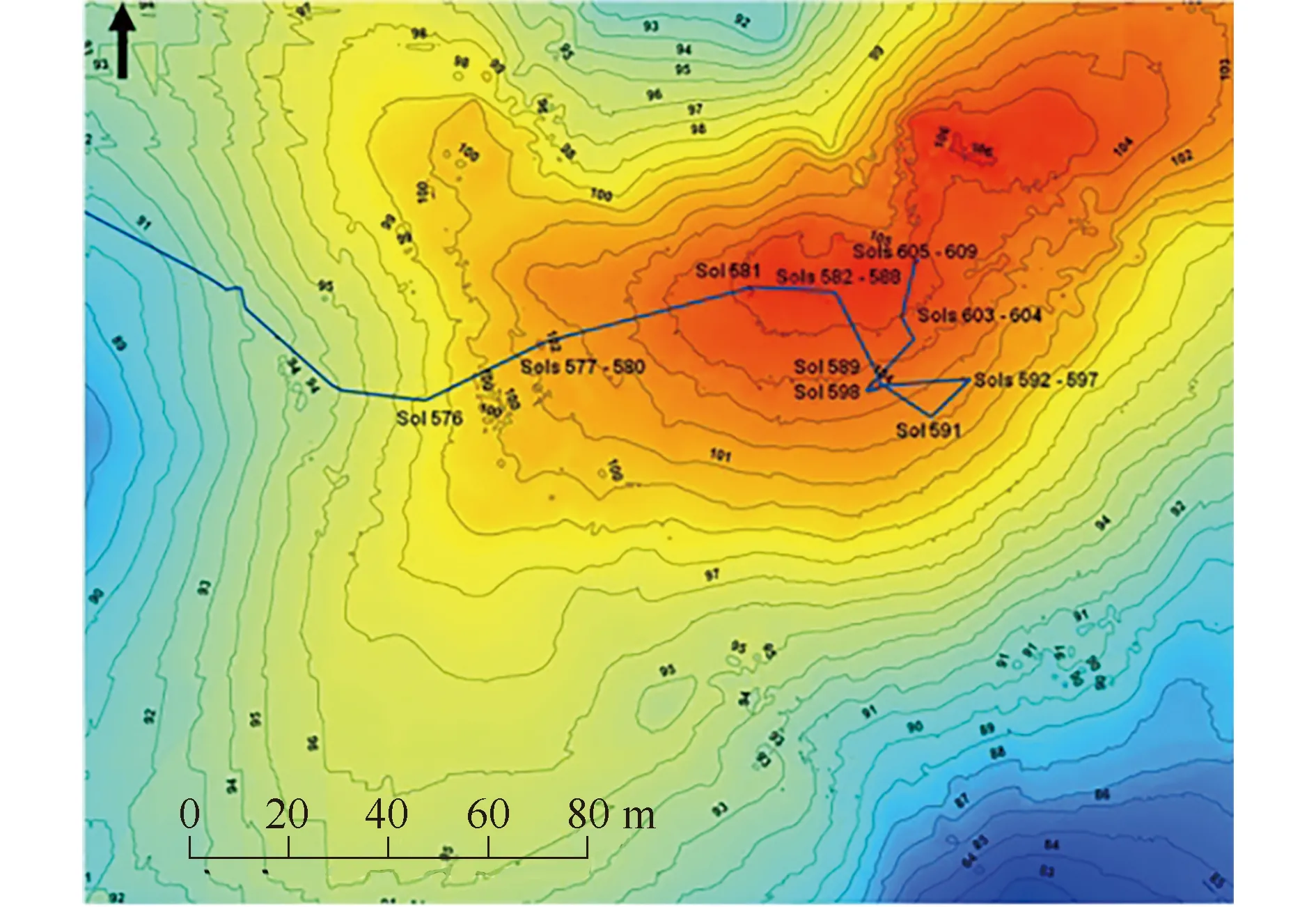
图13 Husband山多站DEM拼接图Fig.13 DEM generated from multiple panoramas taken in the Husband Hill summit area
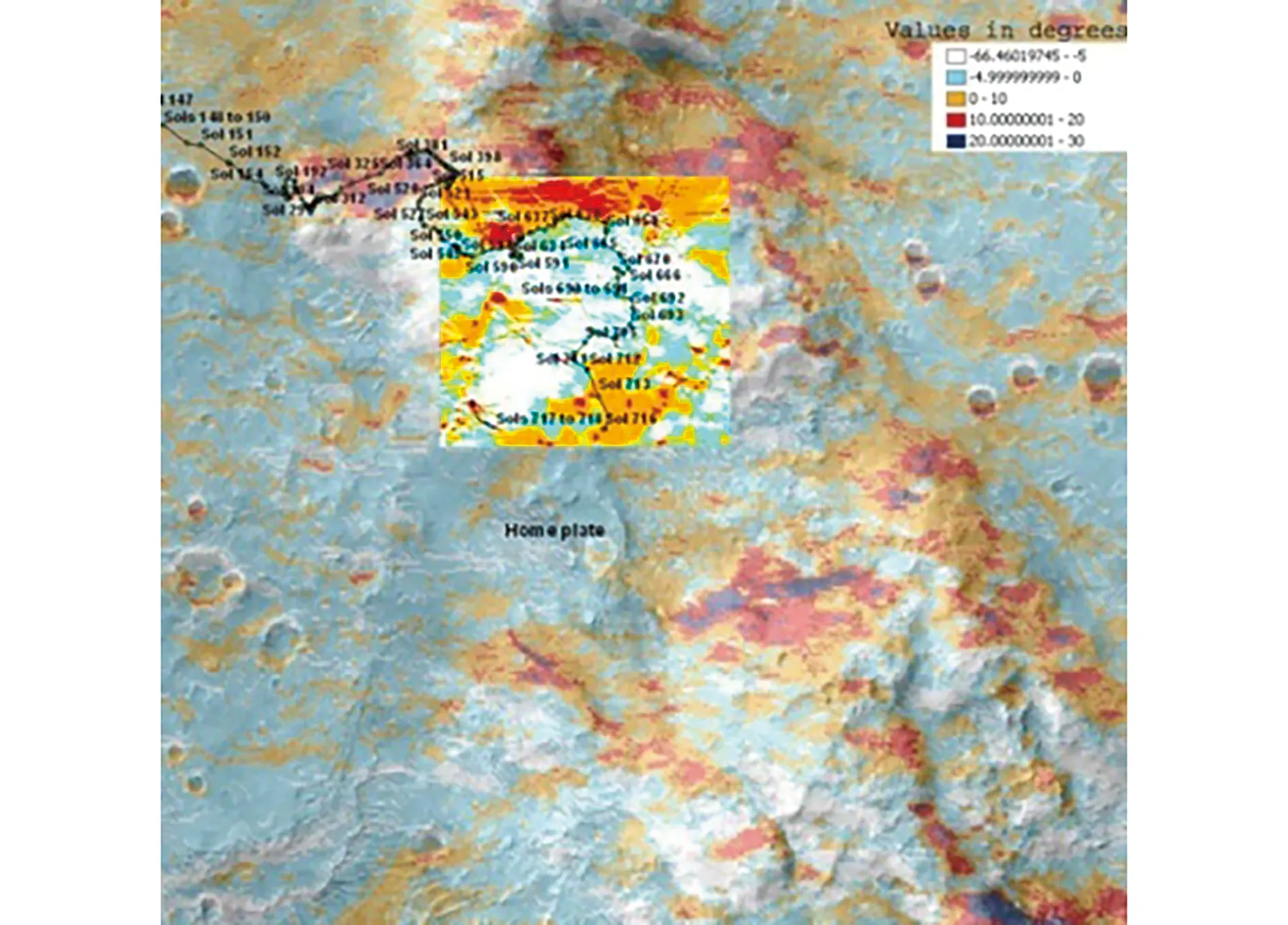
图14 在Husband山顶、内盆地和“本垒”地区的向北坡度图Fig.14 North-facing slope map of Husband Hill summit, inner basin, and Home Plate
图15为全景和导航相机融合后的面片图[67],图16为地形面片显示屏幕快照[49]。地形面片图也用于规划者规划火星车的行驶路线及火星车上仪器设备的操作[67]。通过XYZ点云影像获取三维坐标构建三角网而生成,很多情况下,需要将导航立体相机、全景立体相机和避障立体相机独立生成的面片图合成一个统一的多分辨率的地形面片图以便于更大范围的规划应用。
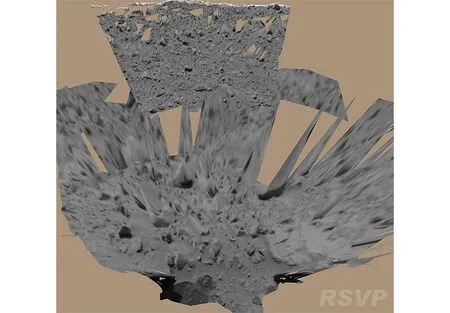
图15 全景和导航相机融合后的面片图Fig.15 Merged PanCam and NavCam mesh
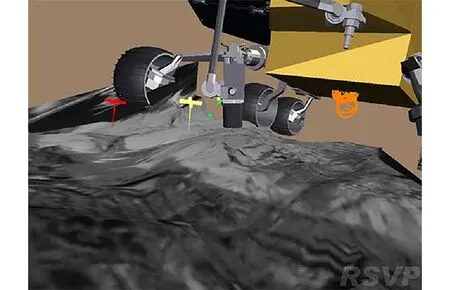
图16 地形面片显示屏幕快照Fig.16 Screen shot showing terrain mesh being used for arm targeting
全景影像镶嵌图是将多个影像无缝拼接成一幅视角更大的图像,镶嵌图根据投影方式的不同有圆柱投影镶嵌图、极坐标投影镶嵌图。如图17为勇气号火星车424火星日获取的圆柱投影镶嵌图,其中(a)为左相机全色影像镶嵌图,(b)为左右相机影像形成的红蓝立体影像镶嵌图[49]。
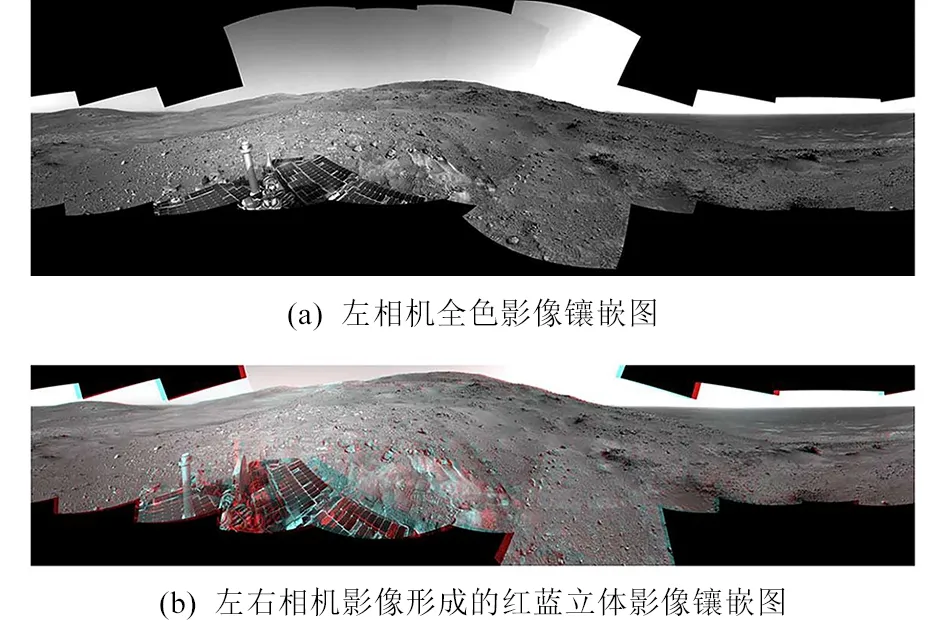
图17 全景影像镶嵌图Fig.17 Panoramic image mosaics
4 火星遥感制图技术发展展望
1)火星多源多重覆盖遥感数据全球制图
火星全球的数字制图产品分辨率均在百米量级,已不能很好地满足各种火星探测工程任务及全球尺度更高精度科学研究的需求。随着覆盖全火星的更高分辨率遥感立体数据的陆续获取,研究制作更高精度、更精细的火星全球制图产品已势在必行,其科学和工程应用意义重大;而目前利用多源、多重覆盖遥感数据进行火星全球制图的摄影测量处理技术还不够完善,特别在多源火星影像高精度几何模型构建与精化、火星特定环境的多源数据匹配、多源多重覆盖择优构网方法技术等方面上还鲜有研究。在已有火星高精度几何处理技术基础上,借鉴对地观测中大区域遥感影像几何处理的相关经验,针对火星全球定位制图中数据的特有问题,进行多源多重覆盖下摄影测量定位制图精度与可靠性方面的理论研究,并对多源多重覆盖下最优影像组合的选择、多源数据的模型构建与精化、多源多尺度数据的匹配、大区域数据平差方法等关键技术攻关,将是火星遥感制图领域的重要研究方向。
2)火星全球控制网的改进
国际上对火星遥感制图常用的是火星MIDIM 2.1控制网。21世纪新获取的轨道器影像的分辨率、定轨定姿精度、激光测高精度和密度相比于构建MIDIM 2.1控制网的数据源都有显著提高,但MIDIM 2.1控制网精度较低,已不能很好地满足新获取轨道器数据制图对控制基准的要求。因此有必要研究基于多探测任务遥感数据改进火星全球控制网的方法,消除和减小不同探测任务数据空间位置的不一致,更好地综合利用各国探测任务获取的最新火星探测数据进行火星科学研究。改进火星全球控制网涉及到多项关键技术,如多源轨道器影像几何模型构建、多源影像匹配与全球影像网构建、全球影像网与激光测高数据的联合平差等,需要在现有技术基础上改进或研发。
3)海量火星遥感数据的自动处理与信息挖掘
目前,多个探测任务获取的火星遥感数据量激增,已经远远超出了人工处理的能力,大量的数据获取后存档,没有及时处理和充分利用。因此开发海量火星遥感数据自动处理和信息挖掘技术,构建基于标准化处理流程的生产线,将是火星遥感制图领域的重要研究方向。例如,可以建立影像几何校正的标准流程,对于新获取的图像,根据相应的轨道位置和传感器姿态信息自动建立成像几何模型,将原始图像自动校正成带地图投影的影像地图;可以建立立体影像三维制图的标准流程,对于新获取的图像,自动搜索同一地区可构成立体像对的图像,进而自动进行图像匹配和平差,然后自动生成DEM和DOM;可以建立火星表面变化检测标准流程,通过同一区域不同时间获取的图像的自动配准、特征提取和变换检测,发现火星表面的变化特征。建立了这些标准化处理生产线,就可大大提高数据处理的效率,自动生成相应的信息产品,而不必人工逐一处理。除了火星遥感制图技术自身的发展外,近年来兴起的云计算、大数据和深度学习技术将为该方向的发展起到有力的推动作用。
4)火星车实时长距离导航定位与制图
目前,火星车的探测方式普遍采用的是火星表面数据获取、数据回传至地球控制中心、地面数据处理、指令上传的运行方式,每个行驶单元(几米至几十米)都要依赖于地面的数据处理与规划,包括定位制图的处理。这种运行方式自身的限制加之火星与地球间通信延时较长,因而火星车探测效率较低,没有充分发挥火星车的行驶能力和数据获取能力。未来火星车探测方式,必然要向自动化和智能化方向发展,火星车实时长距离导航定位与制图是其中的一项关键技术,在此基础上实现长距离自主避障,再加上行驶过程中的信息挖掘和科学目标识别,就可显著提升火星车的探测能力。对于未来智能化的火星车,科学家在遥感制图产品或火星车图像指定了几百米甚至更远的科学目标,火星车就可以自主地锁定目标、避开障碍、安全地行驶到指定的科学目标前进行就位探测,在行驶过程中,火星车还有能力自主发现一些有兴趣的目标进行数据获取。
5)数据共享与国际合作
为了更好地综合利用各国的探测数据进行遥感制图和科学研究,十分有必要通过有效的国际合作,建立和完善国际火星制图标准,包括坐标系、控制网、制图系列比例尺的确定、地图投影、地物的分类与表达、数据格式与编码等。在遵循共同标准的前提下,火星探测数据和遥感制图产品的及时发布与共享,是各国共同促进火星科学研究和推动技术进步的应有选择,这有赖于各国相关业务主管部门的政策支持,以及国际组织和科学工作者的共同努力。
5 结束语
本文对国际火星探测任务、火星遥感制图技术与产品的发展进行了综述,并对火星遥感制图技术的发展进行了展望,期望为我国从事火星探测和火星遥感制图研究和业务的同行们提供一些参考信息。目前火星全球影像制图产品分辨率在百米量级,全球DEM分辨率约460 m;轨道器数据制作的局部区域DEM和DOM分辨率为几十米至米级;着陆区和巡视器数据制作的局部DEM和DOM分辨率为厘米级。面对多任务获取的具有不同成像特性和不同定位定姿精度的海量火星遥感数据,遥感制图的方法技术有待进一步深化和突破,其重点是提高遥感制图的精度、可靠性和自动化水平,以支持更多的科学发现和新的工程任务的实施。
References)
[1] Ojha L, Wilhelm M B, Murchie S L, et al. Spectral evidence for hydrated salts in recurring slope lineae on Mars[J]. Nature Geoscience, 2015,8(11): 1-5
[2] JPL. Mars exploration historical log[EB/OL]. [2017-12-22]. https://mars.jpl.nasa.gov/programmissions /missions/log/
[3] Wikipedia. Exploration of Mars[EB/OL]. [2017-12-22]. https://en.wikipedia.org/wiki/Exploration_of_ Mars
[4] Mutch T A, Binder A B, Huck F O, et al. The surface of Mars: The view from the Viking 1 Lander[J]. Science, 1976,193: 791-801
[5] Mutch T, Grenander S, Jones K, et al. The surface of Mars: The view from the Viking 2 lander[J]. Science, 1976,194: 1277-1283
[6] Soffen G A. The Viking project[J]. J Geophys Res, 1977,82: 3959-3970
[7] Albee A L, Arvidson R E, Palluconi F, et al. Overview of the Mars global surveyor mission[J]. J Geophys Res, 2001,106: 23291-23316
[8] Malin M C, Edgett K S, Cantor B A, et al. An overview of the 1985-2006 Mars orbiter camera science investigation[J]. Mars, 2010, 5: 1-60
[9] Smith D E, Zuber M T, Solomon S C, et al. The global topography of Mars and implications for surface evolution[J]. Science, 1999,284(5419): 1495-1503
[10] Smith D E, Zuber M T, Frey H V, et al. Mars obiter laser altimeter: experiment summary after the first year of global mapping of Mars[J]. J Geophys Res, 2001,106(E10): 23689-23722
[11] Golombek M, Anderson R, Barnes J R, et al. Overview of the Mars pathfinder mission: launch through landing, surface operations, data sets, and science results[J]. J Geophys Res, 1999,104: 8523-8553
[12] Saunders R S, Arvidson R E, Badhwar G D, et al. 2001 Mars Odyssey mission summary[J]. Space Sci Rev, 2004,110: 1-36
[13] Christensen P R, Jakosky B, Kieffer H H, et al. The Thermal Emission Imaging System (THEMIS) for the Mars 2001 Odyssey mission[J]. Space Science Reviews, 2004,110(1-2): 85-130
[14] Chicarro A, Martin P, Trautner R. The Mars express mission: an overview[J]. Noordwijk, Netherlands: European Space Agency Publication Division, 2004, 1240:3-13
[15] Golombek M, Grant J, Parker T, et al. Selection of the Mars Exploration Rover landing sites[J]. Journal of Geophysical Research: Planets, 2003,108(E12): 1-48
[16] Li R, Archinal B A, Arvidson R E, et al. Spirit rover localization and topographic mapping at the landing site of Gusev Crater, Mars[J]. Journal of Geophysical Research: Planets, 2006,111(E2): 1-13
[17] Li R, Di K, Matthies L H, et al. Rover localization and landing site mapping technology for 2003 Mars exploration rover mission[J]. Photogrammetric Engineering and Remote Sensing, 2004,70(1): 77-90
[18] Di K, Xu F, Wang J, et al. Photogrammetric processing of rover imagery of the 2003 Mars exploration rover mission[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2008,63: 181-201
[19] Di K, Wang J, He S, et al, Toward autonomous Mars rover localization: Operations in MER 2003 mission and new development for future missions[C]//The XXI Congress of the International Society for Photogrammetry and Remote Sensing. Beijing:ISPRS, China, 2008
[20] Shotwell R. Phoenix—The first Mars scout mission[J]. Acta Astronautica, 2005,57: 121-134
[21] Zurek R W, Smrekar S E. An overview of the Mars Reconnaissance Orbiter (MRO) science mission[J]. J Geophys Res, 2007,112(E5): 1:22
[22] Grotzinger J P, Crisp J, Vasavada A R, et al. Mars science laboratory mission and science investigation[J]. Space Sci Rev, 2012,170: 5-56
[23] Vaucouleurs G d, Davies M E, Sturms F M Jr. Mariner 9 Areographic Coordinate System[J]. Journal of Geophysical Research, 1973, 78(20):4395-4404
[24] Duxbury T C, Kirk R L, Archinal B A, et al. Mars geodesy/cartography working group recommendations on mars cartographic constants and coordinate systems[C]// Proceeding of the ISPRS Commission IV Symposium "Geospatial Theory, Processing and applications". Ottawa:ISPRS Comission IV, 2002
[25] Archinal B A, A’Hearn M F, Bowell E, et al. Report of the IAU working group on cartographic coordinates and rotational elements:2009[J]. Celestial Mechanics and Dynamical Astronomy, 2011,109(2): 101-135
[26] Davies M E, Arthur D W G. Martian surface coordinates[J]. Journal of Geophysics Research, 1973,78: 4355-4395
[27] Davies M E, Katayama F Y. The 1982 control network of Mars[J]. Journal of Geophysics Research, 1983,88 (B9): 7503-7504
[28] Archinal B A, Lee E M, Kirk R L, et al. A new Mars Digital Image Model (MDIM 2.1) control network[C]//XXth Congress of the International Society of Photogrammetry and Remote Sensing,Istanbul:ISPRS, 2004
[29] U.S. Geological Survey. Mars Control Networks[EB/OL]. [2017-12-22]. http://astrogeology.usgs.gov/maps/control-networks/mars
[30] Kirk R L, Howington-Kraus E, Redding B, et al. High resolution topomapping of candidate MER landing sites with Mars orbiter camera narrow-angle images[J]. Journal of Geophysical Research, 2003,108(E12): 8088
[31] Kirk R L, Soderblom L A, Howington-Kraus E,et al. USGS high resolution topomapping of Mars with Mars orbiter camera narrow-angle images. International achieves of the photogrammetry, remote sensing and spatial information sciences[C]//Proceeding of the ISPRS Commission IV Symposium "Geospatial Theory, Processing and applications". Ottawa:ISPRS Commission IV, 2002,34(4): 713-722
[32] Scholten F, Gwinner K, Roatsch, T, et al. Mars Express HRSC data processing-methods and operational aspects[J]. Photogrammetric Engineering & Remote Sensing, 2005,71(10): 1143-1152
[33] Albertz J, Attwenger M, Barrett J, et al. HRSC on Mars Express-photogrammetric and cartographic research[J]. Photogrammetric Engineering & Remote Sensing, 2005,71(10): 1153-1166
[34] Kirk R L, Howington-Kraus E, Rosiek M R, et al. Ultrahigh resolution topographic mapping of Mars with MRO HiRISE stereo images: Meter-scale slopes of candidate Phoenix landing sites[J]. Journal of Geophysical Research Planets, 2008,113: 5578-5579
[35] Kim J R, Muller J P, Blame M, et al. Geometric ground control of very high resolution imagery using HRSC intersection points and a Non-rigorous camera model[C]//Lunar and Planetary Institute Science Conference. Houston:LPI, 2007,38: 1811
[36] Kim J R, Muller J-P. Multi-resolution topographic data extraction from Martian stereo imagery[J]. Planetary Space Science, 2009,57: 2095-2112
[37] Kim J R, Lin S Y, Muller J P, et al. Multi-resolution digital terrain models and their potential for Mars landing site assessments[J]. Planetary and Space Science, 2013,85: 89-105
[38] Broxton M J,Edwards, L J. The ames stereo pipeline: Automated 3-D surface reconstruction from orbital imagery[C]//The 39th Lunar Planetary Science Conference. League City:LPI, 2008
[39] Moratto Z M, Broxton M J, Beyer, R A, et al. Ames stereo pipeline, NASA’s open source automated stereogrammetry software[C]//The 41th Lunar Planetary Science Conference. Woodlands:LPI, 2010
[40] Li R, Hwangbo J, Chen Y, et al. Rigorous photogrammetric processing of HiRISE stereo imagery for mars topographic mapping[C]// IEEE Transactions on Geoscience and Remote Sensing. New York:IEEE,2011: 2558-2572
[41] 耿迅, 徐青, 蓝朝桢, 等.火星快车HRSC影像三维地形重建[C]//第九届深空探测学术会议论文集. 北京:中国宇航学会, 2012
Geng Xun, Xu Qing, Lan Chaozhen, et al. 3-D topographic reconstruction with Mars Express HRSC images[C]//The 9th Proceedings of the Academic Conference on Deep Space Exploration.Beijing:Chinese Society of Astronautics, 2012
[42] 徐青, 耿迅, 蓝朝桢, 等.火星地形测绘研究综述[J]. 深空探测学报, 2014,1(1):28-35
Xu Qing, Geng Xun, Lan Chaozhen, et al. Review of Mars topographic mapping[J]. Journal of Deep Space Exploration, 2014, 1(1):28-35 (in Chinese)
[43] Wang Y R, Wu B. Investigation of boresight offsets and co-registration of HiRISE and CTX imagery for precision Mars topographic mapping[J]. Planetary and Space Science, 2017,139:18-30
[44] Liu B, Di K, Xu B. Investigation on rational function models for multiple lunar and Mars orbital images[C]//ISPRS Workshop Commission IV/8 “Planetary Mapping and Spatial Databases”. Berlin:ISPRS WG IV/8,2015
[45] 刘一良. 行星轨道器影像高精度制图方法研究[D]. 北京:中国科学院遥感与数字地球研究所,2014
Liu Yiliang. Research on high precision topographic mapping from planetary oribter images[D]. Beijing:Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, 2014 (in Chinese)
[46] 孙义威, 刘斌, 邸凯昌, 等.基于参考图像的行星遥感图像自动几何精纠正[J].国土资源遥感, 2014,27(1):23-28
Sun Yiwei, Liu Bin, Di Kaichang, et al. Automatic accurate geo-rectification of planetary remote sensing image based on reference image[J]. Remote Sensing for Land & Resources, 2014, 27(1): 23-28 (in Chinese)
[47] Kirk R L, Howington-Kraus E, Hare T, et al. Digital photogrammetric analysis of the IMP camera images: mapping the Mars pathfinder landing site in three dimensions[J]. Journal of Geophysical Research Planets, 1999,104(E4):8869-8887
[48] Di K, Xu F, Li R, Matthies L H, et al. High precision landing site mapping and rover localization by integrated bundle adjustment of MPF surface images[C]//International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences. Ottawa:ISPRS Commission IV, 2002,34(4): 733-737
[49] Alexander D A, Deen R G, Andres P M, et al. Processing of Mars exploration rover imagery for science and operations planning[J]. Journal of Geophysical Research-Planets, 2006,111(E2): 1-21
[50] Di K, Li R. Topographic mapping capability analysis of Mars exploration rover 2003 mission imagery[C]//5th International Symposium on Mobile Technology. Padua:ISPRS WG I/5, 2007
[51] Li R, Squyres S W, Arvidson R E, et al. Initial results of rover localization and topographic mapping for the 2003 Mars exploration rover mission[J]. Photogrammetric Engineering and Remote Sensing, Special issue on Mapping Mars, 2005,71(10): 1129-1142
[52] Li R, Archinal B A, Arvidson R E, et al. Spirit rover localization and topographic mapping at the landing site of gusev crater, Mars[J]. Journal of Geophysical Research-Planets, Special issue on Spirit rover, 2006, 111(E2): 1-13
[53] Li R, Arvidson R E, Di K, et al. Opportunity rover localization and topographic mapping at the landing site of meridiani planum, Mars[J]. Journal of Geophysical Research-Planets, Special Issue on Opportunity Rover, 2007,112(E2): 1-12
[54] Olson C F, Abi-Rached H. Wide-baseline stereo vision for terrain mapping[J]. Machine Vision and Applications, 2010,21(5):713-725
[55] Di K, Peng M. Wide baseline mapping for Mars rovers[J].Photogrammetric Engineering and Remote Sen ̄sing, 2011,77(6): 609-618
[56] Herkenhoff K E, Squyres S W, Anderson R, et al. Overview of the microscopic imager investigation during spirit's first 450 sols in Gusev crater[J]. Journal of Geophysical Research Planets, 2006,111(E2): 1:30
[57] MSSS (Malin Space Science Systems). Mars global surveyor Mars orbiter camera geodesy campaign mosaic[EB/OL]. [2017-12-22].http://www.msss.com/mgcwg/mgm/,2002
[58] Caplinger M A. Mars orbiter camera global mosaic[C]//33rd Lunar and Planetary Science Conference. Houston:LPI, 2002
[59] ASU. Mars Global Data Sets[EB/OL]. [2017-12-22].http://www.mars.asu.edu/data/
[60] Neumann G A, Rowlands D D, Lemoine F G, et al. Crossover analysis of Mars orbiter laser altimeter data[J]. Journal of Geophysical Reseach-Planets, 2001,106(E10): 23753-23768
[61] Gwinner K, Jaumann R, Bostelmann J, et al. The first quadrangle of the Mars Express HRSC Multi-Orbit DataProducts (MC-11-E) [C]//ISPRS Workshop Commission IV/8 “Planetary Mapping and Spatial Databases”. Berlin:ISPRS WG IV/8, 2015
[62] Gwinner K, Scholten F, Preusker F, et al. Topography of Mars from global mapping by HRSC high-resolution digital terrain models and orthoimages: Characteristics and performance[J]. Earth & Planetary Science Letters, 2010,294(3/4):506-519
[63] Wikipedia. List of quadrangles on Mars [EB/OL].[2017-12-22].https://en.wikipedia.org/wiki/List_of_quadrangles_on_Mars
[64] Gwinner K, Jaumann R, Hauber E, et al. The High Resolution Stereo Camera (HRSC) of Mars Express and its approach to science analysis and mapping for Mars and its satellites[J]. Planetary and Space Science, 2016, 126: 93-138
[65] HiRISE Operations Center. Digital terrain models[EB/OL].[2017-12-22]. https://www.uahirise.org//dtm/
[66] Di K, Wang J, Agarwal S, et al. New photogrammetric techniques used in the 2003 Mars exploration rover mission [C]// ASPRS 2006 Annual Conference. Reno:ASPRS, 2006
[67] Wright J, Trebi-Ollennu A, Hartman F, et al. Terrain modelling for in-situ activity planning and rehearsal for the mars exploration rovers[C]//Systems, Man and Cybernetics,2005 IEEE International Conference. New York:IEEE,2005: 1372-1377
猜你喜欢
军事文摘(2023年2期)2023-02-17 09:20:46
红领巾·探索(2022年11期)2023-01-06 09:19:16
海外文摘(2021年7期)2021-08-31 21:33:44
农村青少年科学探究(2021年11期)2021-02-24 09:53:18
小哥白尼(神奇星球)(2020年12期)2021-01-18 05:36:16
军事文摘(2020年18期)2020-10-27 01:54:22
大科技·百科新说(2020年10期)2020-03-01 05:25:19
华东师范大学学报(自然科学版)(2017年1期)2017-02-27 13:41:14
中国教育技术装备(2015年10期)2015-03-01 02:41:03
河南科技(2014年3期)2014-02-27 14:06:14
