
国外小天体探测器电源系统设计分析
2018-02-28 00:48:47朱立颖刘治钢张晓峰
航天器工程 2018年1期
朱立颖 刘治钢 张晓峰
(北京空间飞行器总体设计部,北京 100094)
从1958年美国发射第1个月球探测器先驱者0号开始,人类开展深空探测任务已经有60年的历史,共发射了200多个探测器,涵盖月球、各大行星、小行星、彗星及太阳等多个探测目标。行星、太阳和小天体的探测作为重要的发展方向,从20世纪90年代开始,以小天体为目标的探测活动日益增多,成为深空探测领域备受关注的热点,并获得了较为丰硕的成果。
国际上小天体(主要指小行星和彗星)探测已有30多年,美、欧、日先后完成了标志性的任务,如日本隼鸟号(Hayabusa)[1]、欧洲罗塞塔(Rosseta)[2]及美国黎明号(Dawn)[3]等。小天体探测任务也逐渐由“飞越探测”向“绕飞-附着-采样”直至“偏转-操控-利用”方向发展。随着探测任务的复杂、探测距离的增加,电源系统作为探测器的“心脏”,其电能供应的需求也大幅度的提高。小天体探测器多采用电推进作为主推进器。电推进负载具有功耗大、母线电压高及工作模式多样等特点,对电源系统的设计提出了新的需求和挑战。目前,电源系统常用的拓扑结构包括顺序开关分流调节器(S3R)、串联型顺序开关分流调节器(S4R)[4]、最大功率点跟踪(MPPT)[5]等。其中:S3R和S4R拓扑的电路形式简单可靠、效率高,技术相对成熟;MPPT拓扑串联了开关调节,能够实现对太阳电池发电功率的最大利用。
我国小天体探测器的电源系统研究工作起步较晚,可借鉴以美国、日本为代表的国外小天体探测器电源系统的设计、研制经验。本文对上述几个小天体探测器的电源系统设计进行了介绍和分析,结合我国电源系统的发展现状,提出我国小天体探测器电源系统设计的关键技术,给出了发展建议。
1 国外典型小天体探测器电源系统设计概况
1.1 隼鸟号探测器电源系统设计
隼鸟号探测器由日本宇宙航空研究开发机构(JAXA)宇宙科学研究本部(ISAS)研制,其任务是探测近地小行星25143 Itokawa并获取样本返回。其特点主要体现在轻小型化要求、空间环境及负载电压等方面。为了实现着陆-取样-返回任务,受火箭及着陆条件的限制,对隼鸟号探测器的轻小型化提出了极高的要求,也严格限制了各个分系统单机的质量。它距离地球的最远距离在1.6 AU以上,在从近地轨道飞往小行星的过程中,光照条件及温度变化较大,电源系统要适应光照条件和温度的变化,且电源系统的输出效率较高。隼鸟号探测器采用离子电推进作为主推进,整器的功率需求在2000 W以上,电推进的工作电压为0~120 V,平台负载的工作电压为(40±10)V,因此要求电源系统能满足电推进和平台负载的供电需求。
隼鸟号探测器电源系统原理框图见图1,主要参数见表1。电源系统采用不调节母线,设计时采用了新标准、新技术,具有如下特点。
(1)采用双母线拓扑,一条母线由太阳电池阵未经变换直接给电推进供电,另一条母线经降压变换器调压后供给平台其他负载。
(2)太阳电池阵为双翼结构,有效面积为11 m2,采用三结砷化镓电池,太阳电池片的转换效率为26%。
(3)采用全新的母线电压控制技术。母线电压控制没有采用分流控制方式,而是采用串联转换调压恒压(SSR-CV)控制方式。隼鸟号探测器与太阳间的距离变化幅度很大(0.86~1.69 AU),太阳电池片伏安特性曲线的变化也相当大。为了充分、有效地利用电能,电源系统采用SSR-CV母线电压控制(见图1)。SSR-CV母线拓扑结构中降压变换模块实现MPPT串联控制,即使在太阳电池阵伏安特性曲线变化很大的情况下,仍可根据需要进行调节(乃至到最大功率点),不需要进行分流及设置分流控制电路。
(4)为确保轻小型化且满足长达5年乃至更长时间在轨运行的需要,隼鸟号探测器采用锂离子(Li-ion)蓄电池,锂离子电池额定容量为13.2 A·h,由2个16串单体电池组成。
此外,隼鸟号探测器搭载了具有异常监视和自主判断能力、可进行自主诊断的智能卫星控制软件调节系统ISACS-DOC。该系统能够监测电源系统,保证管理与控制人员在故障发生之前了解可能出现的故障,并留有较充足的时间研讨应采取哪些对策。

参数指标产生电能(寿命末期)/W2575(距太阳1AU)太阳电池阵三结砷化镓,11m2蓄电池锂离子,13.2A·h母线电压/V50设计寿命/年5
1.2 罗塞塔探测器电源系统设计
罗塞塔探测器是首个彗星附着探测器,主要任务是检测彗核和彗发的成分,对彗核进行监测,研究彗星的起源、彗星与星际物质之间的关系、太阳系的起源。罗塞塔探测器要追赶彗星飞行10年以上,在任务期间,与太阳距离跨度大(0.90~5.25 AU),温度变化范围大(-130~+50 ℃),工作模式多样。因此对电源系统提出了更高的要求:太阳电池阵既能满足近日点的功率需求,也要满足远日点的功率需求;在不同的工作模式下,能提供稳定的母线电压。
罗塞塔探测器电源系统原理框图见图2,设计方案的主要特点如下。
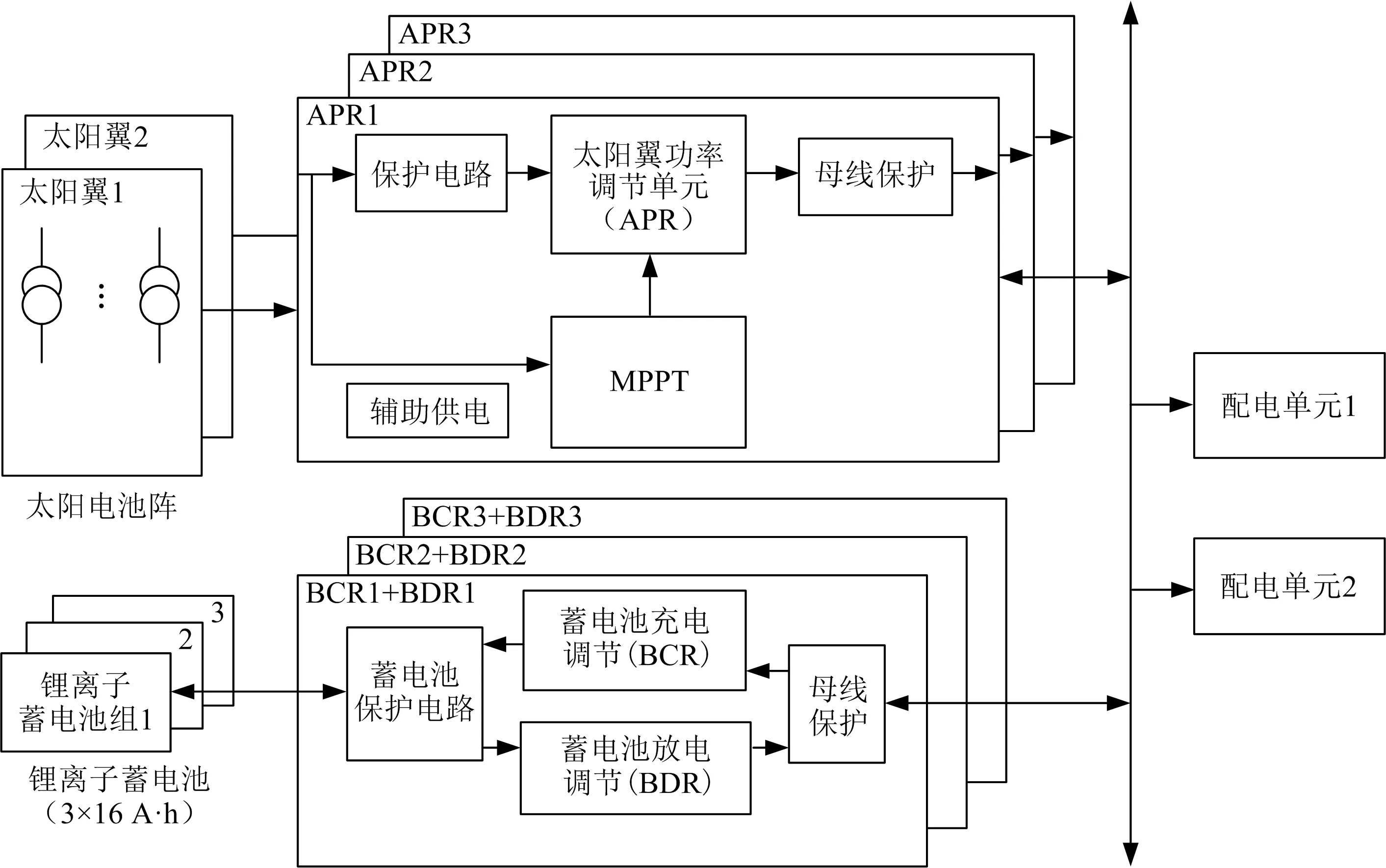
图2 罗塞塔探测器电源系统原理框图Fig.2 Rosseta power system functional block diagram
(1)电源系统采用全调节功率母线,母线电压范围为(28.0±0.1)V。
(2)太阳电池阵为双翼结构,每个翼包含5个单板,单板尺寸为2.25 m×2.736 m,太阳电池阵总面积约为61.5 m2。太阳电池阵采用硅太阳电池片,每个单板的布局为25串91并。太阳电池阵的最大输出功率为7.125 kW(寿命初期,1 AU,+50 ℃),在距太阳的距离为5.25 AU(+130 ℃)时仅为400 W。
(3)电源控制器中包含6个APR,每个翼的功率输出并联连接到3个APR。2个APR模块中配置3个热备份的APR单元,跟踪太阳电池阵的电压特性,直到与最大功率点输出一致。APR在MPPT模式下进行调节,从而控制在该级的太阳电池阵输出功率。
(4)电源系统具有2个独立的配电单元(PDU),其中包含电子锁存限流器(LCL)、限制反流器(FCL)、火工品控制器、切割器和专用加热器控制开关。这些开关为探测器提供输出接口和必要的线路保护,以限制负载故障的传播。
(5)锂离子蓄电池包括3个独立的模块,每个模块包含11串6并的Sony 18650HC锂离子电池。3个模块锂离子电池的总容量为35 A·h,比能量为104 W·h/kg。
1.3 黎明号探测器电源系统设计
黎明号探测器的任务目标是测量谷神星和灶神星小行星的质量、形状、体积和自旋状态,考察2颗小行星的内部结构并进行对比研究,在此基础上研究太阳系形成后早期的状态,了解太阳系的起源与演化。其任务需求特点包括:探测距离达到3 AU以远;采用离子推进技术,且推进器的使用时间长,可适应的母线电压范围为80~140 V;工作模式多,功率需求大,在巡航模式时(1.0~2.9 AU)功率需求大于3000 W,在对谷神星(2.2~2.5 AU)和灶神星(2.8~2.9 AU)探测时功率需求大于600 W。
根据黎明号探测器的任务特点,对电源系统具体要求包括:为电推进提供高压母线,要求电源系统能够适应电推进系统大功率工作和增加或减小负载的需求;为平台提供低压母线;在1 AU时的功率需求为10 700 W,其探测任务的最远距离达到3 AU以远,电源系统在远距离时须提供足够的功率,同时在近地时也可满足负载需求。因此,电源系统在设计时应充分考虑远距离小行星探测任务在低温低光照条件下对电源系统的影响。
黎明号探测器电源系统的原理框图如图3所示,其设计方案主要特点如下。
(1)采用不调节母线体制,电源系统为电推进提供80~140 V的高压母线,为平台其他负载提供22~35 V母线。
(2)太阳电池阵为双翼结构,每个翼由5块单板组成,总面积约为36.5 m2。它采用三结砷化镓电池,电池转换效率大于27.5%。太阳电池的选择考虑了电池低强度/低温(LILT)的性能,通过试验筛选得到适用于LILT环境的太阳电池片。在1.0 AU(寿命终止)时,太阳电池阵可产生超过10 700 W的功率;在3.0 AU时,太阳电池阵输出功率约为1100 W。
(3)电源控制器为电推进负载和其他负载分别提供80~140 V高压母线和22~35 V低压母线。高压母线由太阳电池阵未经变换直接提供给电推进和加热器。其他负载的供电由太阳电池阵部分功率经高压降压变换器(HVDC)提供。HVDC是降压拓扑型DC/DC变换器,主要以2种模式运行:①太阳电池阵电压调节(跟踪峰值功率点);②电池充电限制(包括电流限制和电压/温度限制)。
(4)太阳电池阵功率调节是通过调节HVDC实现基于MPPT的功率控制技术,并没有专门设置MPPT控制模块。
(5)采用氢镍蓄电池组储能。蓄电池额定容量为35 A·h,包含11个单体单元,满足阴影期所有载荷的供电需求,同时保证在发射异常的最坏情况下蓄电池仍有约10%的容量余量。氢镍蓄电池组充放电控制采用过压控制、电压/温度(V/T)控制和压力控制。其中:过压控制用于监测蓄电池是否过压;V/T控制即温度补偿电压控制,采用8档设计,当蓄电池处于某一温度条件时,蓄电池组容量是蓄电池组充电电压的函数这一特性实现充电控制;压力控制是利用氢镍蓄电池可以通过内部压力指示电池荷电状态的特性实现充电控制,即充电时电池内部压力随容量的增加而升高。充电控制的电流分为大电流控制和涓流控制2种。其中:大电流控制有2档,充电倍率分别为C/2和C/10(C为蓄电池额定容量);涓流控制有4档,分别为C/50,C/100,C/200,C/400。
(6)电源系统的PDU单元配置了电源模块、遥测模块、遥控模块及继电器模块,能实现总线通信和配电功能。
(7)电能匹配由飞行软件自主实现。当太阳电池阵可用功率不能满足离子推进器和其他负载需求时,自动降低电推进系统的电源处理单元(PPU)输入功率和推力水平(电推进系统的PPU可用功率为太阳电池阵功率减去非PPU负载功率,再减去电池充电功率)。
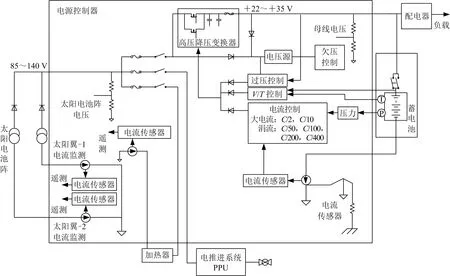
图3 黎明号探测器电源系统原理框图Fig.3 Dawn power system functional block diagram
1.4 小天体探测器电源系统设计特点
小天体探测任务特点可归纳如下。
(1)轨道特点。对于近地小天体,其轨道在地球附近,近日点距离小于1.3 AU。近地小天体自转周期一般较短,为4 min~2 h,体积较小,大多数直径在100~2000 m的范围内(如Itokawa小行星,尺寸约为500 m×300 m),仅有少数特殊的近地小天体直径在2~10 km。对于主带小天体,其分布于火星和木星之间,距太阳约2~4 AU,主带小天体直径多大于近地小天体,太阳系中目前发现最大的小天体是位于主带的谷神星,直径约946 km,其次是智神星和灶神星,平均直径都超过400 km。
(2)光照条件。近地小天体轨道距离约为1 AU,其光照条件与地球静止轨道(GEO)光照条件相近。对于主带小天体,如灶神星,距离地球约3.5 AU,其光照度较近地小天体大幅度减弱,近似与距离的平方成反比。
(3)负载特点。除常规载荷外,电推进负载成为小天体探测器的重要用电负载之一。如隼鸟号和黎明号探测器均采用了电推进技术。电推进负载具有功耗大、母线电压高及工作模式多样等特点。
综上所述,小天体探测的探测距离远、光照条件变化剧烈、负载功耗大等,对探测器电源系统的设计提出了新的需求和挑战。结合对典型小天体探测器电源系统的方案总结分析,可得其设计特点如下。
(1)电推进负载由太阳电池阵直接供电。这样具有极低的输入阻抗,能最大限度地满足电推进负载分段开机的供电需求。隼鸟号和黎明号探测器都采用了这种方式。不过,太阳电池阵电压因光强和温度等的变化造成较大的电压变化范围,要求电推进系统可以适应这个变化范围,增加了电推进系统PPU的电源变换复杂性。
(2)太阳电池阵均使用MPPT功率调节方式。对太阳电池阵输出的电能,有分流调节和MPPT控制2种调节方式。对于太阳电池阵光照调节和工作温度多变的任务,使用MPPT控制方式可以有效地减小太阳电池阵面积,进而减小质量和降低研制成本;另外,使用MPPT控制方式可以有效地利用太阳电池阵,使蓄电池的充电时间更短,可有效地响应突发的任务,降低电源系统对任务的约束。
(3)为平台配置全调节母线或半调节母线。平台设备多为稳定的负载,需要较高品质的母线实现高效、精确的探测器控制,因此,上述的小天体探测器配置了全调节母线或半调节母线。由太阳电池阵输出的电能经DC/DC变换后输出供给母线;配置了一套蓄电池,实现了太阳电池阵和蓄电池组的高效率用;而且,在远距离深空探测中,太阳电池阵输出功率逐渐减小直至电推进不工作时,仍能满足为平台提供电能的需求。
2 电源系统关键技术
2.1 MPPT拓扑
MPPT拓扑能够随时跟踪太阳电池阵的最大功率输出点,实现对太阳电池发电功率的最大利用,因此特别适用于太阳光照条件变化剧烈的情况。MPPT拓扑可以使电源系统在相同的太阳电池和蓄电池配置条件下,输出更多的电量,从而减少整个探测器的体积和质量。MPPT拓扑已在多个航天器中应用,如火星快车、金星快车、罗塞塔、信使号等。MPPT拓扑对比如表2所示。
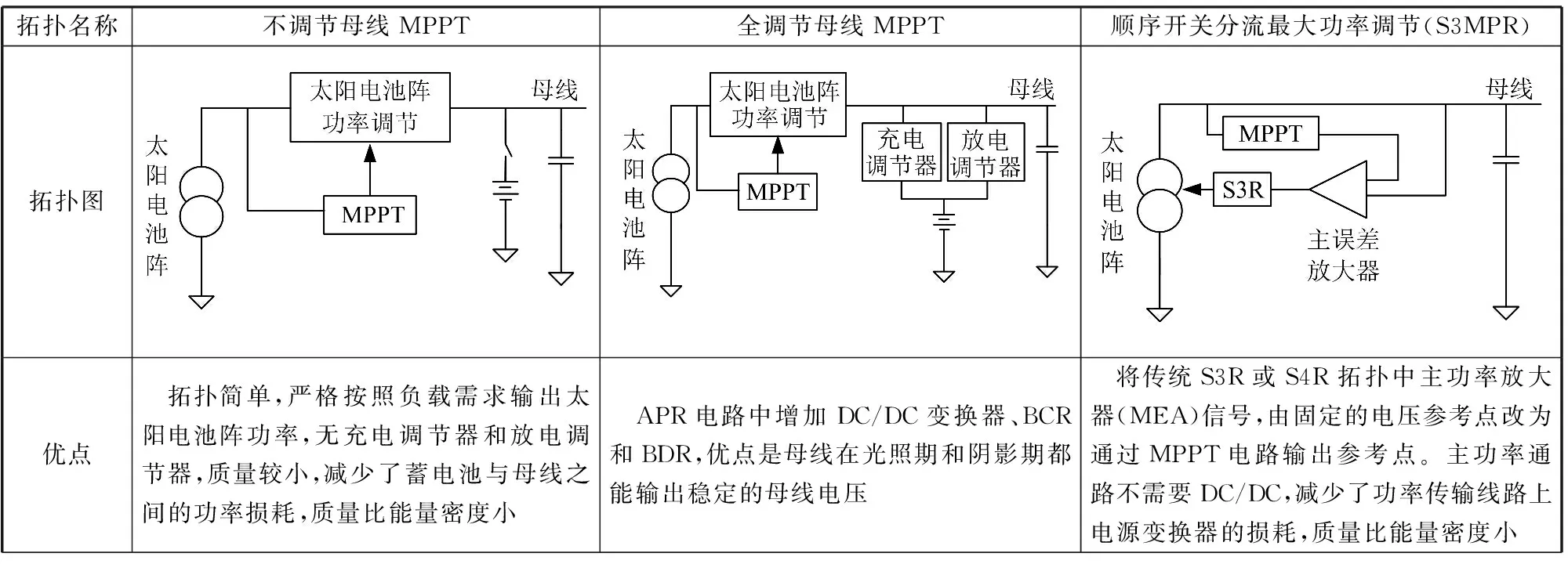
表2 MPPT多拓扑比较
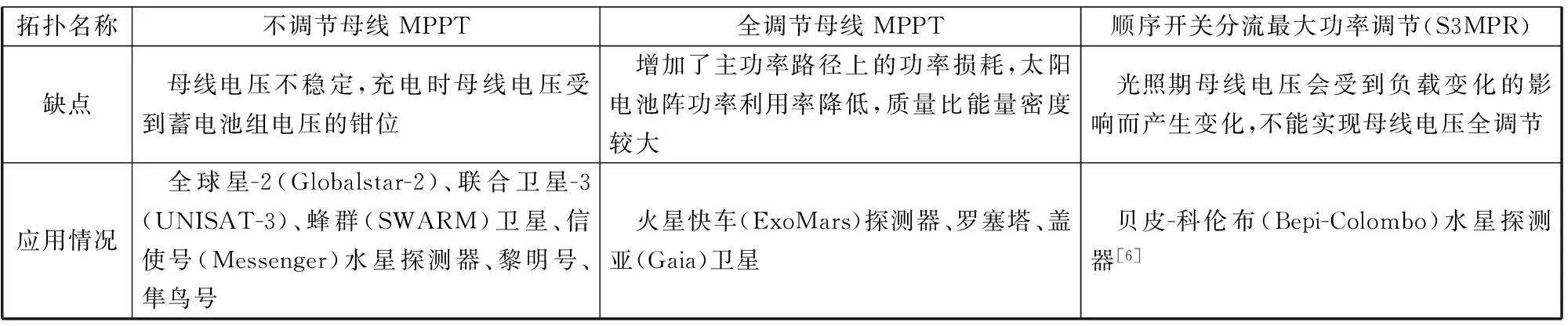
续 表
MPPT拓扑结构的选择主要依据负载特性要求、质量功耗限制综合考虑,以达到系统最优。
2.2 电能自主运行和管理
从地球到小天体,若探测距离达到3 AU以远,单程的通信时间最长可达23 min,地面测控站及地面应用站无法实时与探测器建立联系,无法实现对探测器的实时控制。因此,小天体探测器,尤其是远距离的小天体探测器,应具备较强的自主运行和管理能力。其中,电能自主运行和管理应至少体现在以下几个方面。
(1)电能的监测和调节。电源系统应能自主监测太阳电池阵、蓄电池等电能供给和存储设备的功率水平,并可对功率进行统一调节,自主实现太阳电池阵供电、分流,蓄电池充放电等功能;电源系统还应具备功率调节模块状态监测、自主主备切换等能力。
(2)电能的分配。电能分配应按级分配,按负载优先级管理,依据电能的供给自主调节,实现无人干预时电能的分配与供给匹配。
(3)电能的保护。电能保护应至少具备防蓄电池过充、过放保护,以及欠压保护等能力,具备紧急模式的最小电能供给及系统故障诊断、隔离、恢复能力,具备电源系统故障模式下的重构能力。
(4)电能自洽。电源系统在应对多种复杂模式下的供电需求时,比如小天体探测的附着采样阶段,在负载功率需求增加、采用联合供电模式仍然供电能力不足时,能通过自身电能平衡的预分析判断电能供给时间,进行附着采样工作任务的调节,实现电能的自洽。
3 启示与建议
本文对小天体探测器电源系统的需求特点及解决方案进行了分析和总结,结合我国小天体探测器电源系统的发展情况,提出如下建议。
1)优化MPPT功率调节方式
MPPT技术使太阳电池阵工作在最大功率点,可最大限度地利用太阳电池阵的输出功率。对于小天体探测器,其太阳光照变化剧烈,因此优选MPPT调节方式。MPPT有多种调节方式,其中不调节MPPT和S3MPR方式拓扑简单,缺点是不能提供稳定的母线电压;全调节MPPT可提供稳定的母线电压,但结构复杂。隼鸟号与黎明号探测器都利用了MPPT技术。但是,对于电推进负载,并没有直接使用串联或者并联型的MPPT,而是直接由太阳电池阵为电推进负载供电,这种方式既能减小系统的质量,又能通过调节负载实现MPPT控制的功能。我国小天体探测器若采用电推进系统,可优选太阳电池阵直接为电推进供电,并通过调节平台供电的变换器实现MPPT控制功能。
2)重视电能自主运行和管理研究
深远距离的小天体探测探测器应具备较强的自主运行能力,能应对复杂的多模式探测任务及远距离通信带来的时延。电能自主运行和管理应至少具备电能的监测和调节、电能的分配、电能的保护、电能自洽。目前,我国探测器的电能自主管理主要由综合电子系统完成,在任务分解和电能平衡分析方面还存在一定的问题,例如:多系统接口复杂,管理困难,主要体现在综合电子系统、电源系统、载荷接口多,控制时相互迭代困难,电能流管理复杂;器载控制器资源浪费,电源控制器与综合电子系统都具备控制能力,但电源控制器主控机利用率低;电能平衡分析仍然由地面计算实现。对于小天体探测器,尤其是一次实现伴飞、着陆及采样等任务,因小天体表面特性、自转周期、对探测器遮挡情况都不能确定,因此为了实现电能自分析及电源系统自主运行和管理,采用粒子群算法、神经网络、模糊控制等控制算法,结合健康管理传感器网络和鲁棒特征故障提取方法、分层类聚智能故障诊断算法、基于数据驱动与失效物理结合的故障预测算法,实现电能自洽,减少与其他分系统与单机控制接口。为了实现电能自主运行和管理,应尽早开展上述算法的研究,优化算法设计。
3)深入开展电源系统的轻小型化设计
对于深空探测任务,尤其是小天体探测任务,由于距地球距离远,受运载能力限制,探测器的质量要求限制严格,这也对电源系统的轻小型化设计提出了更高要求。电源系统的轻小型化设计,除考虑高比功率电源系统拓扑、高比功率蓄电池及高性能太阳电池阵之外,应优选集成化设计方式。目前,我国已经应用功率调节与配电单元(PCDU),且大幅提高了电源系统的比功率。我国的小天体探测器电源系统也可优先采用PCDU。同时,片上系统(SoC)和系统级封装(SIP)技术的发展迅速,芯片电源逐渐成熟,电源系统可考虑采用封装技术实现更高的集成化设计,MPPT控制模块采用集成技术,同时采用总线化设计,实现系统的轻小型化。
References)
[1] Takashi Kubota, Tatsuaki Hashimoto, Shujiro Sawai,et al.An autonomous navigation and guidance system for MUSES-C asteroid landing [J]. Acta Astronautica, 2003,52(2/3/4/5/6):125-131
[2] A Accomazzo, P Ferri, S Lodiot, et al. Rosetta operations at the comet [J]. Acta Astronautica, 2015, 115: 434-441
[3] Greg Cardell1, Antonio Ulloa-Severino, Michael Gross. The design and operation of the Dawn power system [C]//Proceedings of the 10th annual International Energy Conversion Engineering Conference. Washington D.C.:AIAA,2012:414-420
[4] 马鑫,张东来,徐殿国.S3R&S4R控制策略分析及仿真[J].测控技术,2007,26(6):45-50
Ma Xin, Zhang Donglai, Xu Dianguo. S3R & S4R control strategy analysis and simulation [J]. Measurement & Control Technology, 2007, 26(6): 45-50 (in Chinese)
[5] 刘治钢,蔡晓东,陈琦,等.采用MPPT技术的国外深空探测器电源系统综述[J].航天器工程,2011,20(5):105-110
Liu Zhigang, Cai Xiaodong, Chen Qi, et al. Overview of space power system design using MPPT for deep space spacecraft [J]. Spacecraft Engineering, 2011, 20(5): 105-110 (in Chinese)
[6] 曾毅,崔波.一种新的航天器电源系统拓扑[J].航天器工程,2009,18(5):95-99
Zeng Yi, Cui Bo. A novel topology of spacecraft electric power system [J]. Spacecraft Engineering, 2009, 18(5): 95-99 (in Chinese)
猜你喜欢
太空探索(2020年10期)2020-10-22 03:59:40
百科探秘·航空航天(2019年4期)2019-06-11 05:43:07
百科探秘·航空航天(2019年5期)2019-06-06 01:38:54
汽车维修与保养(2017年1期)2017-05-15 02:40:16
汽车维修与保养(2016年1期)2016-09-07 08:33:04
汽车维修与保养(2016年12期)2016-03-14 06:37:10
汽车维修与保养(2016年11期)2016-02-21 08:04:06
云南师范大学学报(自然科学版)(2015年5期)2015-12-26 12:46:14
电源技术(2015年5期)2015-08-22 11:18:12
电源技术(2015年7期)2015-08-22 08:49:00
