遥感卫星在轨可用性约束条件分析及对策
2018-02-28 00:42田志新李小娟杨易王宇飞王虎妹
航天器工程 2018年1期
田志新 李小娟 杨易 王宇飞 王虎妹
(北京空间飞行器总体设计部,北京 100094)
随着姿态机动能力的快速提升,遥感卫星支持多点目标成像、条带拼接成像、非沿迹成像、立体成像等多种敏捷成像模式,卫星成像模式、载荷组合模式、星上载荷数据处理模式、海量数据传输策略越来越复杂[1]。一方面,近15年来,我国遥感卫星的任务模板数增长了29倍,任务指令数增长100%[2],任务注入和星载设备的操控难度不断加大;另一方面,用户面临如何通过操控策略改进提升遥感卫星在轨使用效能的难题:以某在轨综合型遥感卫星为例,对147天在轨测试的运行数据统计分析,卫星能源使用效率不足50%、存储资源使用效率不足40%、数传弧段使用效率不足70%。因此,提升卫星可用性设计成为迫在眉睫的问题。
针对上述挑战,本文从系统工程的角度出发,以天地一体化视角,从任务注入、设备控制、信息获取、数据传输、能源平衡五个维度,分析了制约遥感卫星在轨可用性的主要环节。针对这五个环节,从三个方面提升遥感卫星的在轨可用性:采用面向任务的“宏指令”,提升任务注入效率,并降低卫星的操控难度;采用动态任务规划,提升卫星能源、存储资源和数据传输资源的在轨使用效率;采用星上指令序列优化,提升卫星数据获取和数据传输任务的执行效率。本文方案已应用于某领域遥感卫星,与传统在轨控制模式相比,卫星的任务测控效率提升了约5倍,用户操作接口复杂度降低了约94%,并显著提升了卫星存储资源使用效率和海量数据传输效率。本文方案对后继遥感卫星可用性设计具有借鉴意义。
1 遥感卫星在轨可用性约束分析
目前,遥感卫星通过“任务规划+指令生成”实现在轨控制。任务规划系统根据成像需求、卫星运行状态、星载资源最大包络使用约束、地面资源可用性等因素完成任务规划,通过观测区域、卫星资源、地面接收资源匹配优化,制定载荷工作方案和跟踪接收计划;接着,根据任务规划的结果生成载荷控制指令序列,经由测控系统上注给卫星,在预定时间获取成像数据和接收有效载荷数据[3]。用户完成一次任务操作,涉及的环节包括:任务注入、星上设备控制、信息获取和数据传输等,同时,卫星平台必须为任务操作提供必要的能源。
1.1 任务注入环节分析
与传统遥感卫星相比,遥感卫星姿态机动能力不断加强,每轨成像任务数显著增长。以轨道高度500 km的太阳同步成像卫星为例,传统模式下卫星每轨成像任务仅1~2个,而法国昴宿星(Pleiades)等敏捷成像卫星每轨的任务数增加到20个[4]。高分辨率对地观测卫星一般采用近90°倾角的太阳同步轨道,卫星每天过境窗口短,在轨仅5%~10%的时间可在境内执行测控任务[5],由于敏捷成像能力的提升,要求卫星每天注入的任务量由20~30个提升到100~120个左右,基于“指令模板”的传统运控体制不能满足使用要求。
1.2 设备控制环节分析
随着卫星功能性能快速提升,成像模式、数据处理模式、数据传输策略越来越复杂[6]。目前,遥感卫星一般支持以下工作模式:多载荷组合、多姿态机动策略下的成像记录;多载荷组合、多姿态机动策略下的境内实时观测;境外数据对地链路数据回放;基于中继链路的境外数据回放;多载荷组合策略下的境内准实时观测(又称为“边记边放”);多载荷组合策略下的境外准实时观测(又称为中继“边记边放”)等。鉴于指令使用不当引起任务失败、甚至导致星上设备损坏,地面操控人员的工作强度与风险越来越大。
1.3 信息获取环节分析
给定飞行轨道,卫星飞越成像目标i和成像目标j的时间间隔记做Ti,j。显然,Ti,j越小表明卫星获取信息的能力越强。随着姿态机动能力的增强,遥感卫星开始支持敏捷成像,包括同轨多目标成像,同轨多条带拼接成像,同轨多角度观测成像,非沿迹成像等。所有成像模式均可以简化为若干个快速点目标成像任务,该类成像模式对星上动作的实时性要求很高,如何缩短多次点目标成像任务的控制时序成为提升信息获取效率的核心环节。
1.4 数据传输环节分析
在相同幅宽下,遥感卫星载荷数据量与成像分辨率的平方成反比。遥感卫星成像分辨率快速提升,导致卫星载荷数据量快速增长。考虑到星载能源、频谱资源等约束,我国遥感卫星目前还是以对地数据传输为主。由于历史及地缘政治等原因,美国在全球设地面站,欧洲、俄罗斯在北极地区建立地面站,卫星每天可用数传弧段多,从而实现了高分辨率遥感卫星的海量图像数据下传。目前,我国遥感卫星主要依赖国内地面站接收遥感图像数据。我国国内地面站的分布特点导致卫星每天可用的数传弧段少,提升数传弧段的使用效率可以大幅度地提升卫星的在轨使用效能。
1.5 星载能源约束分析
为了提升姿态机动能力,新一代遥感卫星通过优化转动惯量和系统柔性提升敏捷成像能力。昴宿星(Pleiades)、轨道观测-5(OrbView-5)、艾克诺斯-2(Ikonos-2)等卫星对太阳翼展开方式进行优化,展开后太阳翼横向尺寸变大,通过降低整星转动惯量提升姿态机动速度;同时取消驱动机构等活动部件,通过提高太阳翼刚度降低整星柔性,减少姿态机动到位后的稳定时间。然而,上述设计导致星体在成像过程中对太阳翼形成遮挡,星载能源将制约卫星可承载的任务量。随着成像分辨率和姿态机动能力快速提升,载荷能源消耗水平快速增长和星载能源供给削减的矛盾愈发突出,卫星操控必须确保星载能源安全。
2 面向可用性的遥感卫星设计对策
针对制约遥感卫星易用性的各类要素,提出了一种遥感卫星运控模式,从3个方面提升遥感卫星的可用性:采用面向任务的“宏指令”取代“指令模板”,提升任务注入效率、简化星上设备控制难度;地面系统采用“动态约束规划”取代“静态约束规划”;星载计算机采用“自主指令序列优化”取代“被动执行上注指令”,提升卫星信息获取、数据传输、能源使用的效率。
2.1 面向任务的“宏指令”操控模式
面向任务的通用操控模式正在取代指令序列注入模式,成为一种极有前景的运控模式。采用面向任务的通用操控接口,地球观测-1(EO-1)卫星实现了对冰冻圈、洪水、火山等突发自然灾害的应急响应能力[7];火星探测车(Mars Exploration Rovers,MER)提升了航天器在复杂太空环境下的自主生存能力[8];Kucinskis等人[9]则从面向“任务”的载荷建模方法、星载自主管理软件架构、星地数据接口设计等方面给出了详细的设计方案。然而,文献[7-9]只能处理工作模式简单、载荷操控方式不多的遥感卫星,本文作者(田志新等)曾发表[10]将复杂遥感卫星各类工作模式下的载荷控制流分解成四类“基本指令序列”和相互之间的约束关系。将四类基本指令序列包含的全部指令依次映射为有向图的顶点,将全部指令时序关系映射为有向图的边,指令间的时间间隔映射为该边的“时间间隔”属性;将约束矩阵转化为有向图的边,边的指向代表指令的执行顺序约束,边的“执行时长”等于两条指令执行的时间间隔。于是,任务指令序列调度问题就对应从卫星有向图模型中挑选“基本指令序列”组合、根据任务信息修正有向图的顶点/边属性、并基于修正后的有向图子图进行顶点排序的数学问题。如图1所示的对地实时观测任务有向图模型, TCA1~TCA6是实时观测数据处理基本指令序列映射得到的6个顶点,TCB1~TCB4是有效载荷B数据产生指令序列映射得到的4个顶点,TCC1~TCC3是天线控制基本指令序列映射得到的3个顶点,TCD1是姿态控制基本指令序列映射得到的1个顶点。有向图边包括两类:一是基本指令序列内部指令时序约束映射的边,边的长度代表基本指令序列内部指令的时间间隔;另一类包括基本指令序列之间约束产生的边,包括TCD1→TCA3、TCYB2→TCA3、TCYC2→TCYB2、TCA4→TCYB3、TCYB3→TCYC3,分别表示姿态机动指令TCD1执行90 s后发出数据传输指令TCA3,有效载荷B数据输出指令TCYB2执行后发出数据传输指令TCA3,天线转动指令TCYC2执行140 s后发出有效载荷B数据输出指令TCYB2,数据传输停止指令TCA4执行后发出有效载荷B数据停止输出指令TCYB3,有效载荷B数据停止输出指令TCYB3执行后发出天线停止转动指令TCYC3。
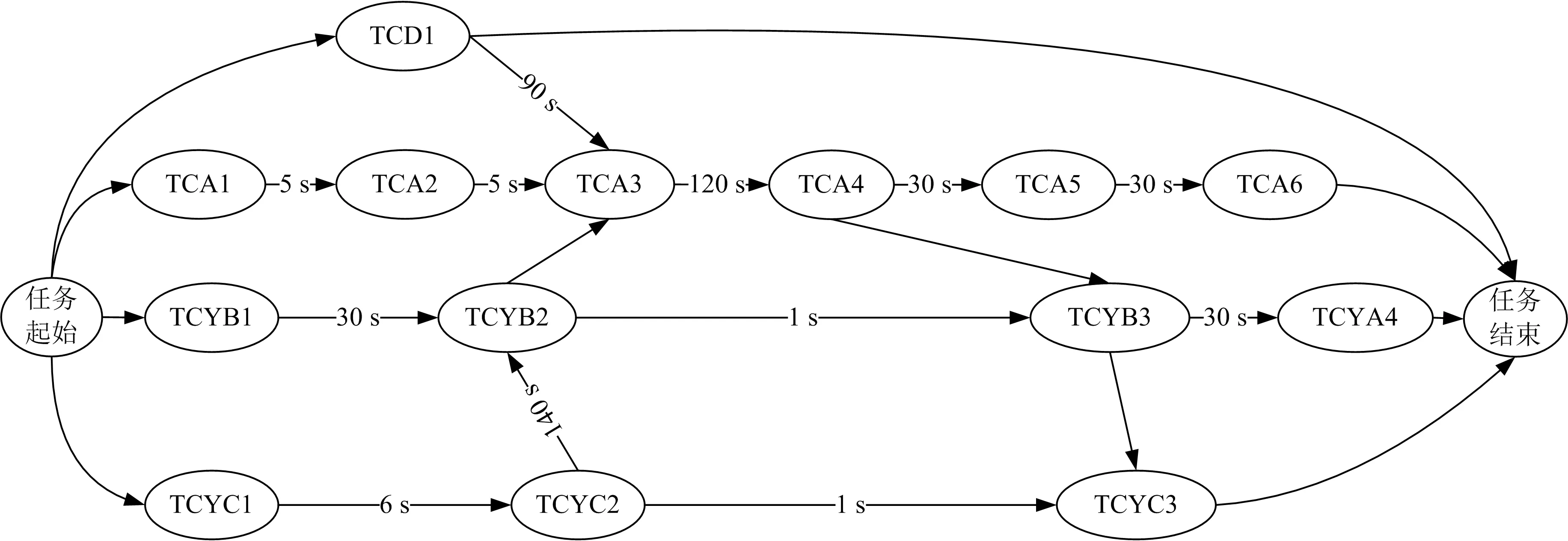
图1 对地实时观测任务有向图模型Fig.1 Digraph-model of real-time imaging and transmitting mission
新的运控模式只要定义三个“面向任务”的通用操控接口即可满足各型卫星使用。
(1)“成像记录任务”:包括成像记录工作模式字、任务代号、任务优先级、成像区域、成像开始时刻、成像时长等成像任务信息,以及成像参数设置信息。
(2)“数据回放任务”:包括数据回放工作模式字、任务代号、回放模式、地面站(中继星)标识、回放起始时刻、回放时长等数据传输任务信息。
(3)“边记边放任务”:包括边记边放工作模式字、任务代号、任务优先级、边记边放模式、成像区域、成像开始时刻、成像时长等成像任务信息,地面站(中继星)标识、回放起始时刻、回放时长等数据传输任务信息,以及成像参数设置信息。
2.2 动态约束条件下的卫星任务规划
1)遥感卫星数字化模型
用于在轨操控的遥感卫星数字化模型包括卫星行为模型和卫星约束模型,如图2所示。
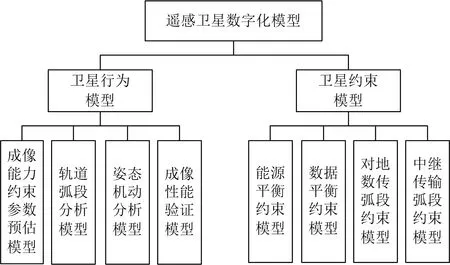
图2 遥感卫星数字化模型Fig.2 Digital model of remote sensing satellite
(1)成像能力约束参数预估模型:将空间分辨率、观测方向、信噪比等要求转化为成像过程起止姿态角、扫描地速等卫星工作状态约束参数,为轨道弧段分析和姿态机动分析提供依据。
(2)轨道弧段分析模型:基于任务目标参数和卫星工作状态约束参数,得到轨道弧段范围,为姿态机动分析提供轨道参数序列。
(3)姿态机动分析模型:基于轨道弧段范围、任务目标参数和卫星工作状态约束参数,对卫星成像过程姿态预置、姿态复位的姿态机动指向、角速度等参数进行计算,为成像性能验证和卫星约束模型提供姿态机动参数序列。
(4)成像性能验证模型:基于载荷功能模型和任务目标参数计算地面摄影点坐标、空间分辨率、观测高度角和方位角、信噪比等,验证卫星姿态机动过程能否满足成像性能要求。
(5)能源平衡约束模型:根据轨道与姿态动态参数,基于卫星三维动态模型、日-地-星空间关系模型等限制条件,计算能源供给功率和消耗功率,分析是否满足能源安全约束。
(6)数据平衡约束模型:根据载荷数据量/数据速率、星地数传/中继数传的数据量/数据速率,分析任务是否满足星上数据存储能力、数传能力等数据平衡约束条件。
(7)对地(中继)数传弧段约束模型:根据卫星轨道与姿态动态参数和地面站(中继星)位置,分析是否满足对地(中继)数传天线最大指向范围、最大转动角速度;基于卫星构型、太阳翼转动模型、对地(中继)数传天线构型和转动模型,分析是否满足可通视的约束条件;计算可用数传弧段,并给出对地(中继)数传天线预置时间和预置角。
2)动态任务规划过程
(1)初始任务队列求解。在不考虑星载能源约束和数传天线遮挡的条件下,采用传统的任务规划方法,制定载荷工作方案和跟踪接收计划,得到初始任务队列。
(2)基于对地数传弧段约束模型和中继数传弧段约束模型,计算数传弧段和天线预置时间。根据初始任务队列,综合考虑星体构型、卫星轨道、任务姿态等信息,仿真天线指向角度,以及天线、星体和地面站(中继星)之间的几何关系,分析卫星进(出)地面站(中继卫星)的天线遮挡情况,得到本批次任务可用的数传弧段;根据上次数传任务结束时刻的天线停止位置,计算本次数传天线的预置时长。
(3)基于数据平衡约束模型,实现成像任务-数据传输任务匹配优化。根据动态仿真得到的数传弧段,结合载荷数据量预估、成像任务优先级等,取消低优先级成像任务,实现数据平衡。
(4)基于能源平衡约束模型,实现能源供给预估。根据卫星轨道,星体滚动、俯仰、偏航的姿态参数变化,动态计算太阳翼的太阳光入射角和光强,并根据卫星真实三维结构模型计算太阳翼被卫星本体遮挡的面积,计算出太阳翼的发电功率。
(5)任务级能源优化和消耗仿真。根据任务的时间分布特性优化多次成像过程的载荷开关机状态,如果连续两次成像任务的时间间隔大于载荷的关机时间与开机时间之和,则在两次任务期间关闭载荷,以降低负载功耗;如果连续两次任务的时间间隔足够大,则将姿态回摆到纵轴对地。之后,计算卫星负载功率随时间的变化情况。
(6)基于能源平衡的任务优化。根据卫星能源的供给和消耗关系,得到蓄电池在轨运行过程中的放电深度,根据放电深度安全阈值、任务优先级等,调整成像任务和数据回放任务,使蓄电池容量满足安全运行的要求。
(7)在卫星能源比较充裕的时间段插入新的成像任务或数据回放任务,并对新的任务队列重复步骤(2)~(6),修正新的任务组合模式下的能源、数据传输约束条件。通过若干次迭代,形成最优的任务列表和相应的“动态约束参数”。
(8)将最终的“任务信息”和“动态约束参数”通过测控系统上注给卫星。
2.3 星载自主任务管理
遥感卫星接收到地面注入的“成像记录”、“数据回放”和“边记边放”高级任务信息,以及基于模型仿真的动态约束任务规划系统得到的特定任务组合下的“动态约束参数”,包括可传输的数传弧段,天线预置时长,成像姿态预置时长等,基于用户任务的时间分布特性,结合实时运行状态信息,优化有效载荷控制、数传控制、天线控制、姿态控制过程,提升卫星的信息获取效率和海量数据传输效率。
2.3.1 基于关键路径优化的信息获取效率提升设计
随着卫星姿态机动能力快速提升,前后相邻成像任务的载荷控制可能产生操作冲突。对于给定飞行轨道,卫星每天飞越两个侦照目标oi和oj的时间间隔是固定数值,记做Ti,j。显然,Ti,i+1越小,表明卫星获取情报的能力越强。对于两个连续目标,卫星必须在Ti,i+1时间内完成目标oi成像段、关机段的指令动作,以及目标oi+1开机段的指令动作。本文作者提出基于有向图拓扑优化的相邻任务最优控制算法[11]。将成像任务指令序列抽象成三个基础指令序列PL(p,q),DP(b,c,d,e)和AOCS(r,s),连续成像任务有向图模型如图3所示,每次任务包括顶点a,b,c,d,e,p,q,r,s及其之间的有向边,a代表任务开始,c代表对目标成像指令,d代表停止成像指令,b,p,r代表设备开机或姿态机动指令,q,e,s代表设备关机或姿态恢复指令,上标i表示第i次成像任务的相关变量。如果对第i/(i+1)个目标开始成像指令对应的有向图最长路径为ci→di→ei→ai+1→bi+1→ci+1,对两个目标成像的最短时间必须满足Ti,i+1≥tcd(i)+tde(i)+tea(i)+tab(i+1)+tbc(i+1) 。成像段时间tcd(i)取决于第i次任务需求,tde(i)+tea(i) 是第i次任务关机段时间;tab(i+1)+tbc(i+1) 是第i+1次任务开机段时间,均无法进行时序优化。通过取消第i次任务基础指令序列DP的关机段和第i+1次任务基础指令序列DP的开机段指令,连续成像任务有向图顶点的最长路径减小为ci→di→si→ai+1→ri+1→ci+1,连续对两个目标成像的最短时间满足Ti,i+1≥tcd(i)+tds(i)+tsa(i)+tar(i+1)+trc(i+1) 即可。通过对第i次成像任务关机段和第i+1次成像任务开机段时序优化,可以大幅度提升卫星的数据获取能力。
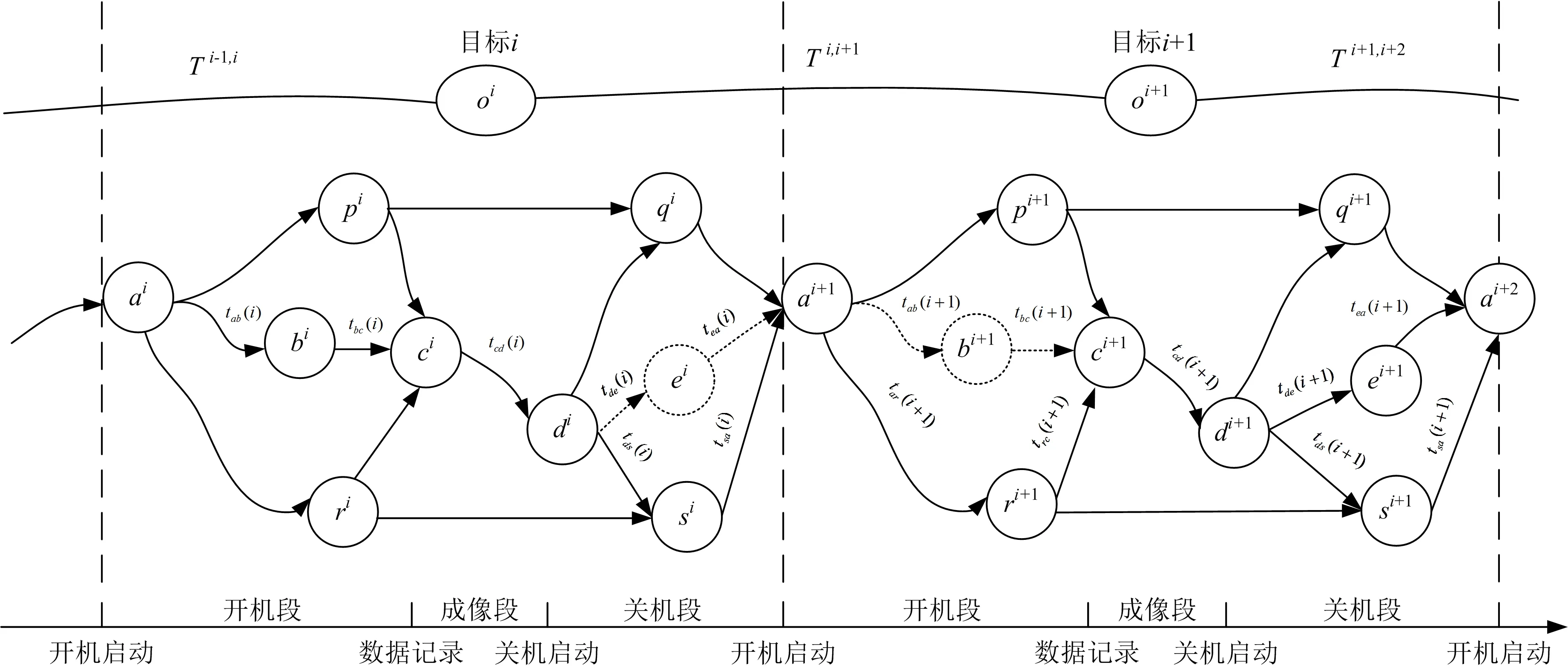
图3 连续成像任务的有向图模型优化Fig.3 Consecutive imaging mission optimization based on digraph model
2.3.2 基于提前预置、交叉使用的海量数据接力传输设计
高分辨遥感卫星采用二维机械扫描点波束天线传输海量遥感数据。对于轨道高度500 km的遥感卫星,以五个地面站(牡丹江、北京、喀什、昆明、三亚)为例,图4给出了二维点波束天线数据传输任务的时空分布特性图,五个圆圈是五个地面站的可用数传弧段,每个地面站对卫星的可视时间不足9 min,可传弧段平均时间约为7 min。多站接力时间约16 min,当卫星离开当前地面站接收范围并进入其它地面站接收范围时,需要天线快速转动并跟踪下一地面站。天线对地跟踪的角速度不超过0.6(°)/s,按照180°框架角估算,二维点波束天线的预置时间长达5 min,如果按照冷备份策略使用对地数传天线,天线预置时间将至少浪费31%的对地传输弧段。卫星运行一圈约90 min,陆地面积占30%,卫星在轨的空闲时间很长,对首个地面站传输前,有足够多的空闲时间段完成天线预置;考虑到地面站的使用效率,地面任务规划系统可确保卫星对每个地面站的传输时间约7 min左右,可以利用数据传输时间段完成下一次传输任务所用天线的预置动作。由高分辨率成像卫星的任务时空分布特性可知,利用卫星任务的时空分布特性,通过提前预置、交叉使用的点波束天线使用策略,可以避免天线预置时间占用宝贵的成像弧段和数传弧段。

图4 海量遥感数据接力传输优化Fig.4 Consecutive massive data transmitting mission optimization
2.4 新一代遥感卫星运控模式
综上所述,可用性导向的新一代遥感卫星运控模式转变如图5所示。
1)从专用操控模式向通用操控模式转变
传统运控下,每颗卫星都需要地面系统配置一套指令模板。随着在轨卫星数快速增长,开发、维护费用高。新模式下,只要定义3个面向业务的通用“宏指令”,即可满足各型卫星使用。“宏指令”简化了星地界面,具有4个优势:①卫星入轨后快速应用,提升了部署速度;②用户只要提供任务参数即可操控卫星,降低了操控难度,避免了操作失误的安全隐患;③注入一条指令即可完成数十条硬件指令的功能,提升了任务注入效率。④卫星具备了协同观测的能力:随着我国天基观测能力的逐渐增强,亟待通过高中低轨道天基资源协同观测,实现搜索、发现、识别、确认、跟踪等功能。采用传统的操控模式,每颗卫星需要彼此了解彼此的详细设计信息才能实现协同操控;采用“宏指令”,每颗卫星无需了解彼此设计细节即可实现互操作,从而降低了研发和在轨维护成本。
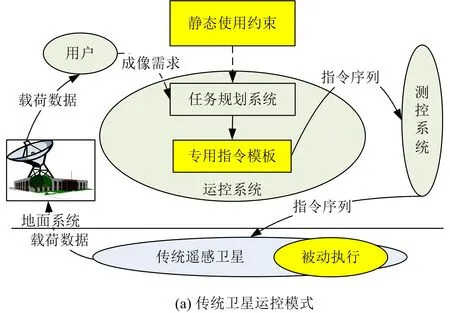
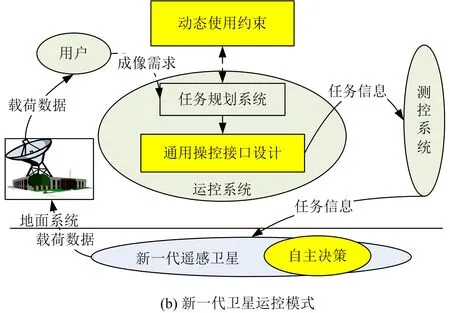
图5 面向可用性的遥感卫星运控模式升级Fig.5 Remote sensing satellite operation evolution for in-orbit usability
2)从静态任务规划向动态任务规划转变
卫星能源、存储资源和数传弧段资源将成为制约高分辨率敏捷卫星的短板。在新的运控模式下,首先在不考虑资源约束条件下,得到初始的任务规划队列;之后,地面任务规划系统根据卫星方提供的“数字化模型”,动态计算任务队列对应的真实蓄电池电量、可用星载存储资源容量、可传输数传弧段长度,天线预置时长,成像姿态预置时长等,修正约束条件;通过约束条件和任务队列之间的闭环迭代优化,避免传统运控模式过渡保守的资源约束制约卫星使用效能。
3)从星地开环管理向星地闭环管理转变
卫星除了回放载荷数据,还将运行过程的工程参数回放到地面系统,分析实际运行过程与地面“数字化卫星模型”的预测差异,定期修正能源模型、姿态机动模型等,实现应用策略与卫星特性的匹配性,实现卫星全生命周期的精细化运营管理。同时,卫星根据实时遥测信息自主优化成像过程和数据回放计划,并将星上自主调整的结果通知地面任务规划系统,地面任务规划系统根据卫星的运行状态优化后继用户任务。
3 应用效益分析
以某在轨综合型遥感卫星为例,仅从任务注入效率、用户操作复杂度、对我国实时监测效率的角度出发,分析本文运控模式相比传统运控模式的优势。该卫星采用太阳同步回归圆轨道,轨道高度490 km。卫星装载3台相机载荷,支持单相机载荷成像、相机载荷两两组合成像、3台相机联合成像共计7种载荷组合模式。支持每轨一次姿态机动成像或者连续两次姿态机动成像,共计2种成像姿态机动策略。卫星配置两副点波束数传天线和一副低速数传天线,支持总计3种数据传输模式,其中对地天线的转动范围为飞行方向-105°~+105°,垂直飞行方向-70°~+70°,转动速度1(°)/s,天线预置时间的最大包络为210 s。对于我国境内成像任务,采用高速实时传输、高速边记边放、低速边记边放模式;对于我国境外的成像任务,采用境外成像数据记录,境内高速回放或者低速回放模式,卫星在轨需要支持共计6种数据处理方法。采用“宏指令”,每个用户任务包含的信息不超过40字节,传统运控模式下每个上行注入任务数据块可以容纳6个任务,注入效率提升了5倍;采用3个面向用户业务的通用操控接口,就可以支持总计52种工作模式,包括7种载荷组合模式、2种姿态机动策略下的总计14种成像记录工作模式,7种载荷组合模式、2种数据传输策略下的总计14种对地实时传输工作模式,7种载荷组合模式、3种数据传输策略下的总计21种边记边放工作模式,以及3种数据回放模式,操控接口复杂度可以减少94%。采用STK软件对该卫星一个回归周期的成像任务进行仿真,采用传统运控体制时,卫星单轨成像的点目标数最大为6个,采用有向图关键路径优化技术后,卫星单轨成像的点目标数量最大提升到8个,卫星单轨最大信息获取效能提升了33.3%。采用北京、三亚两个地面站,多站接力传输可传弧段时间最长16 min,传统运控模式下,对地面站两次接力传输的切换时间为5 min,采用“提前预置、交叉使用”的数据传输策略,两次接力传输的切换时间为30 s,数传弧段的使用效率从69%提升到97%。该综合型遥感卫星的后继星采用动态约束条件代替传统的静态约束条件优化总体方案,采用能源按天平衡策略和星上动态存储管理策略,卫星载荷成像功率增长5.6倍,对地回放功率增长12.3倍,中继回放功率增长13.8倍,而蓄电池容量仅增长71.4%,太阳电池阵的供电能力则优化了22.4%;卫星有效载荷数据率增长了近20倍,而存储容量、对地传输数据率、中继传输数据率分别仅增长到3.0倍、2.3倍和2.0倍。采用STK对该后继星的在轨典型任务进行仿真,蓄电池的平均放电深度18%(当前在轨卫星平均放电深度13%),最大放电深度不超过30%(当前在轨卫星最大放电深度不超过20%);卫星存储平均使用率提高到优于90%(当前在轨卫星的固存使用效率平均低于40%),大幅度提升了星载能源和存储资源的使用效率。
4 结束语
综上所述,任务注入、设备控制、信息获取、数据传输、能源平衡是影响遥感卫星可用性的主要环节,本文提出一种全新的遥感卫星天地一体化在轨运控模式,采用面向任务的“宏指令”,提升了复杂卫星的任务注入效率,并简化了星上设备的控制难度;地面系统采用基于卫星数字化模型的“动态约束规划”,结合星载计算机的“自主指令序列优化”技术,提升了成像数据获取效率、海量数据传输效率、能源使用效率等。本文方案对后继遥感卫星运控模式研究具有借鉴意义。
References)
[1] Lemaitre M,Verfaillie G, Jouhaud F, et al. Selecting and scheduling observations of agile satellites[J]. Aerospace Science and Technology, 2002, 6(5): 367-381
[2] 田志新, 汤海涛, 王中果, 等. 基于星上动态指令调度的卫星使用效能提升技术[J]. 宇航学报, 2014, 35(1): 1105-1113
Tian Zhixin, Tang Haitao, Wang Zhongguo, et al. Satellite utility improvement technique based on dynamic on-board command scheduling[J]. Journal of Astronautics, 2014, 35(1): 1105-1113 (in Chinese)
[3] 贺仁杰, 李菊芳, 姚锋, 等. 成像卫星任务规划技术[M]. 北京:科学出版社,2011
HeRenjie, Li Jufang, Yao Feng. Earth observing satellite mission planning[M]. Beijing: Science Press, 2011(in Chinese)
[4] 徐伟, 朴永杰. 从Pleiades剖析新一代高性能小卫星技术发展[J]. 中国光学, 2013, 6(1) : 9-19
Xu Wei, Piao Yongjie. Analysis of new generation high-performance small satellite technology based on the Pleiades[J]. Chinese Journal of Optics, 2013, 6(1): 9-19 (in Chinese)
[5] 金光, 武小悦, 高卫斌. 卫星地面站资源配置仿真研究[J]. 系统仿真学报, 2004, 16(11): 2401-2403
Jin Guang, Wu Xiaoyue, Gao Weibin. Simulation-based study on resource deployment of satellite ground station[J]. Journal of System Simulation, 2004, 16(11): 2401-2403 (in Chinese)
[6] Tian Zhixin, Cui Xiaoting, Li Xiaojuan, et al. Digraph-model-based dynamic command scheduling: an emerging paradigm for smart satellite operation[C]// 6th Conference on Advanced Space Technology, Shanghai: Chinese Society of Astronautics & International Academy of Astronautics, 2015: 661-669
[7] Thompson D R, Bornstein B J,Chien S A, et al. Autonomous spectral discovery and mapping onboard the EO-1 spacecraft[J]. IEEE Trans. on Geoscience and Remote Sensing, 2013, 51(6): 3567-3579
[8] Grotzinger J P, Crisp J, Vasavada A R, et al. Mars science laboratory mission and science investigation[J]. Space Science Reviews, 2012, 170(1-4): 5-56
[9] Kucinskis F N, Ferreira M G V. Planning on-board satellites for the goal-based operations for space missions[J]. IEEE Latin America Trans., 2013, 11(4): 1110-1120
[10] 田志新,崔晓婷,郑国成, 等. 基于有向图模型的卫星任务指令生成算法[J]. 航天器工程, 2014,23(6):54-60
Tian Zhixin, Cui Xiaoting, Zheng Guocheng, et al. Remote sensing satellite autonomous command sequences generation based on digraph-model[J]. Spacecraft Engineering, 2014,23(6):54-60
[11] Tian Zhixin, Cui Xiaoting, Li Xiaojuan, et al. Remote sensing satellite mission operation based on dynamic coloring digraph-model[C]// 5th National Academic Conference for Space Data System. Nanjing, Nanjing University, 2017: 113-117
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
学生天地(2020年3期)2020-08-25
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
移动通信(2019年2期)2019-03-27
科技与创新(2019年2期)2019-02-14
汽车观察(2018年9期)2018-10-23
发明与创新·大科技(2018年2期)2018-03-17
CHIP新电脑(2016年7期)2016-07-18
诗选刊(2015年4期)2015-10-26