利用姿态调整规避地气光的GSO空间碎片观测方法
2018-02-28 00:43朱永生胡海鹰雷广智郑珍珍陈起行
航天器工程 2018年1期
朱永生 胡海鹰 雷广智 郑珍珍 陈起行
(1 上海微小卫星工程中心,上海 201203)(2 中国科学院西安光学精密机械研究所,西安 710119)
地气光主要来源于地球表面和云层对太阳光的反射,以及大气对太阳光的散射,其分布与强度随季节和轨道位置变化[1],是空间暗弱目标观测的主要干扰因素之一。因此,地气光规避技术是天基空间碎片观测面临的一项关键技术,也是一大技术难点。
对于卫星遥感器,传统的地气光规避方法主要是利用光阑、内/外遮光罩、挡光环等消光措施,对进入光瞳内的杂光进行抑制。哈勃空间望远镜的地气光抑制措施,主要包括外遮光罩、主镜内遮光罩、次镜遮光罩及内部挡光环设计等[2-3]。美国空间中段试验卫星(MSX/SBV)[4-5]和加拿大“蓝宝石”卫星(Sapphire)[6-7]的杂光抑制,主要是采用立轴光学系统、降低主次镜表面散射、遮光罩特殊设计等。詹姆斯-韦伯空间望远镜主要采用挡光屏挡光方式规避地气光[8-9]。上述方法能够提高卫星遥感器对地气光的抑制能力,但对遮光罩的设计、挡光环“刃口”的处理和材质选择、消光漆性能等方面要求极高,尤其是针对暗弱空间碎片探测的遥感器,代价高、技术难度大。本文在文献[10-11]中介绍的自然交会、定点凝视和区域凝视等观测模式的基础上,结合地气光影响特性,提出一种利用姿态调整(偏航、滚动联动)的观测方法,可实现对地气光的有效规避和地球同步轨道(GSO)空间碎片的高效能观测。
1 规避地气光的空间碎片观测方法
1.1 规避地气光的观测方法流程
GSO空间碎片天基光学观测,是指利用低轨卫星遥感器对GSO空间碎片进行观测,获取空间碎片的光学测角数据,实现对空间碎片的定位和定轨。卫星遥感器的观测区域主要与观测弧段和姿态导引律相关,即这两者确定之后,观测空域便唯一确定。地气光对不同的观测弧段影响不同,且随季节不断变化。本文观测方法的流程可描述为:首先,建立卫星的运动学模型,确定地气光的来源区域;然后,建立地气光影响模型,计算地气光的影响弧段,规划出合理的观测弧段;最后,建立观测模型,在STK和MATLAB软件中利用穷举法仿真得出合理的姿态机动导引律。具体流程如图1所示。
目前,低轨遥感卫星的运动学模型比较成熟,可用高精度的高斯行星摄动方程来描述[12]。因此,在本文方法中,关注的重点为地气光影响计算和姿态导引律设计。其中,姿态导引律设计不仅受到卫星本身姿态机动能力的约束,还受到地气光、空间碎片相对运动速率和观测效能等多重因素约束。

图1 观测方法流程Fig.1 Flow for observation method
1.2 地气光影响建模
地气光不同于太阳、目标、星体等点目标,不能简单通过常规的点源透过率(PST)来衡量,它属于面目标,需要对其所有来源进行区域划分,再对各个区域的贡献累加求和,综合评估其影响。地气光来源(见图2)可分为光照区地气光和阴影区地气光。光照区地气光源于地球几何光照区,主要由地球表面和云层反射太阳光产生,也包含部分大气散射;阴影区地气光源于地球几何阴影区,主要由晨昏太阳光经大气散射产生。在可见光和近红外波段,地气光以地球表面及云层反照太阳光为主[1]。
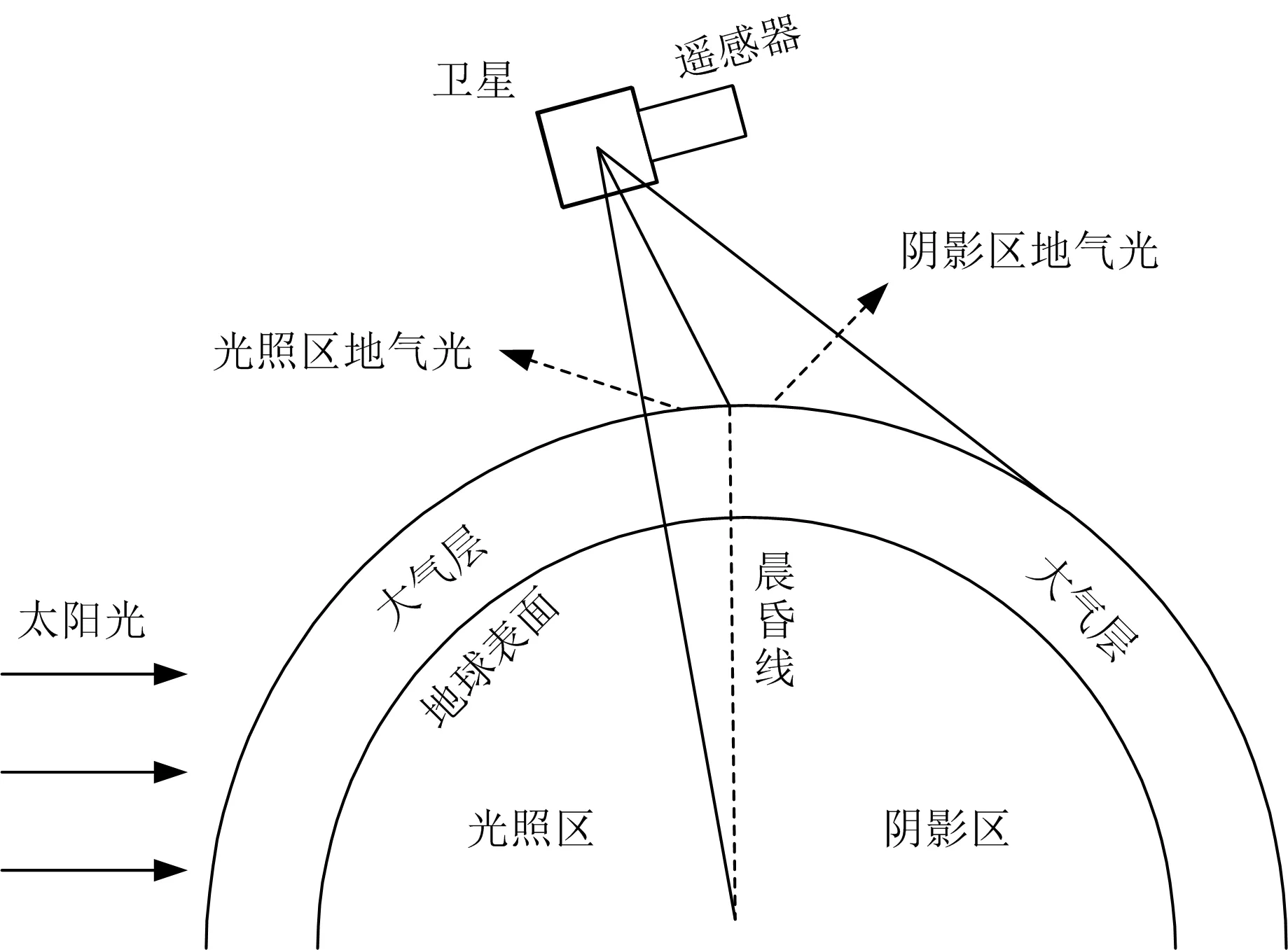
图2 地气光来源分布示意Fig.2 Source of earth-atmosphere radiation
光照区地球表面和云层反射太阳光产生的地气光,是天基光学观测的主要地气光来源(占比约为95%),因此本文的地气光建模只针对这些地气光;同时,假设地球表面云层均一分布,不考虑云层散射,只考虑云层反射。地表特征由WGS84椭球体表征,地球是理想的朗伯体,无向上散射。
地气光对卫星遥感器的影响计算,是根据杂光源区域进行小面元ds划分,计算每个面元的辐亮度和杂光贡献量,积分求得像面杂光照度。
面元ds的辐亮度dL、杂光入瞳处照度贡献量dE和杂光贡献量dECCD分别为
(1)
(2)
(3)
式中:ρ为大气云层顶端反射率;Es为卫星遥感器工作谱段内的辐照度;θs为面元太阳光照角;θp为面元杂光反射角;R为面元与卫星遥感器的距离;θsp为面元杂光与卫星遥感器光轴的夹角;P(θsp)为卫星遥感器CCD上辐照度与进光口θsp角方向的辐照比,是已知量,由试验测得。
像面杂光照度为

(4)
1.3 空间碎片观测建模
利用低轨卫星遥感器探测GSO空间碎片时,卫星通过在滚动和偏航方向上的姿态调整实现对观测区空间碎片的观测,观测几何模型见图3。
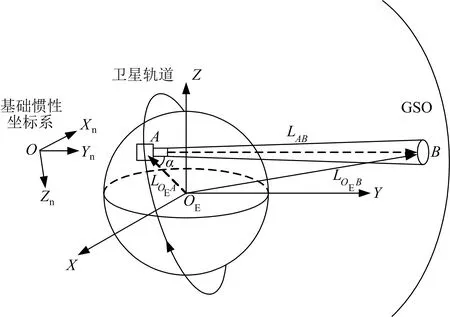
图3 空间碎片观测几何模型Fig.3 Geometric model of space debris observation
图3中,OE为地心,A为卫星质心,B为遥感器视场中心与GSO的交点。遥感器光轴指向表示为LAB,地心OE到卫星质心A的位置矢量表示为LOEA,地心OE到B点的位置矢量表示为LOEB,观测区范围以纬度带和经度带区域来表征。基于此,建立J2000坐标系、基础准惯性坐标系和地固坐标系,分别表示为OEXYZ,OXnYnZn(Xn轴由升交点指向降交点,Yn轴垂直于卫星轨道面法向,Zn轴根据右手定则确定),OEXeYeZe。建模的目的是把矢量LOEB在J2000坐标系的3个分量转换到地固坐标系(球坐标形式),涉及到的坐标系转换包括基础准惯性坐标系到J2000坐标系,J2000坐标系到地固坐标系,第1个转换矩阵为Mn,第2个转换矩阵为Me。
[PXePYePZe]T=
(5)
因此,卫星遥感器扫过的GSO经度和纬度分别为
(6)
(7)
转换矩阵Mn和Me的表达式分别见式(8)和式(9)。
(8)
式中:SG为格林尼治时角。
(9)
有一点需要注意,Me是一个不考虑地球章动、岁差、极移等影响的简化坐标转换矩阵。
2 仿真验证
2.1 观测弧段规划
假设观测时间为2017年,卫星轨道为500 km高的太阳同步晨昏轨道,姿态机动范围偏航、滚动均为±90°;遥感器视场为4°×4°,采用同轴光学系统,其遮光罩设计参考某遥感卫星,采用分段式超长遮光罩,挡光环数量为21个,遮光罩表面采用喷漆Z306处理。观测要求为:①1天内实现GSO纬度±2°遍历;②空间碎片在遥感器像面上的相对运动速率不超过0.02 (°)/s。仿真得到1年中的地气光影响弧段如图4所示。



注:横、纵坐标表示卫星轨道在地固坐标系中的投影。红色曲线表示受地气光影响的弧段,黑色曲线表示不受地气光影响的弧段。图4 全年受地气光影响的观测弧段分布Fig.4 Influence arc section of earth-atmosphere radiation in a year
卫星在500 km轨道上的运行周期约为94.7 min,根据地气光影响仿真结果,不同季节的地气光影响弧长和分布不一样。2017年4-9月,主要影响北半球观测,影响时间为41~51 min;2017年11月-2018年1月,主要影响南半球观测,影响时间为51~56 min;2018年2月和3月,主要影响西半球观测,影响时间约为45 min;在2017年10月,主要影响东半球观测,影响时间约为57 min。因此,观测弧段选为:2017年4-9月,在南半球观测,每轨观测时长40 min;2017年11月-2018年1月,在北半球观测,每轨观测时长38 min;2018年2月和3月,在东半球观测,每轨观测时长49 min;2017年10月,在西半球观测,每轨观测时长37 min。
2.2 北半球观测

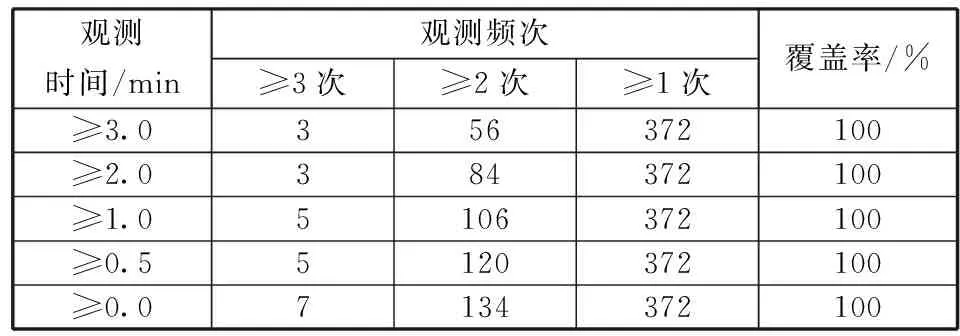
由图5可知,利用区域凝视在北半球进行0°的GSO凝视观测,卫星姿态在滚动和偏航方向进行机动,每轨可扫描±2°纬度带、30.6°经度带(每轨扫过的区域用不同的颜色表示,图9和图13相同),1天内对±2°纬度带遍历扫描。由表1可知,1天内可实现其内372个空间碎片的全覆盖,且观测弧长均超过3 min。由图8可知,卫星姿态滚动方向最大机动角约为16.41°,最小机动角约为10.25°,偏航方向从+11.4°开始按照0.01 (°)/s速率匀速机动到-11.4°。遥感器每轨的观测弧段超过3 min,空间碎片在像面两轴的运动速率均小于0.016 (°)/s。因此,2017年11月-2018年1月,在区域凝视基础上增加姿态偏航方向机动,每轨在北半球进行38 min观测,可满足观测需求。
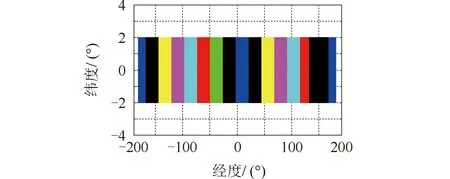
图5 GSO区域覆盖(北半球)Fig.5 Graph of covering GSO area (Northern Hemisphere)
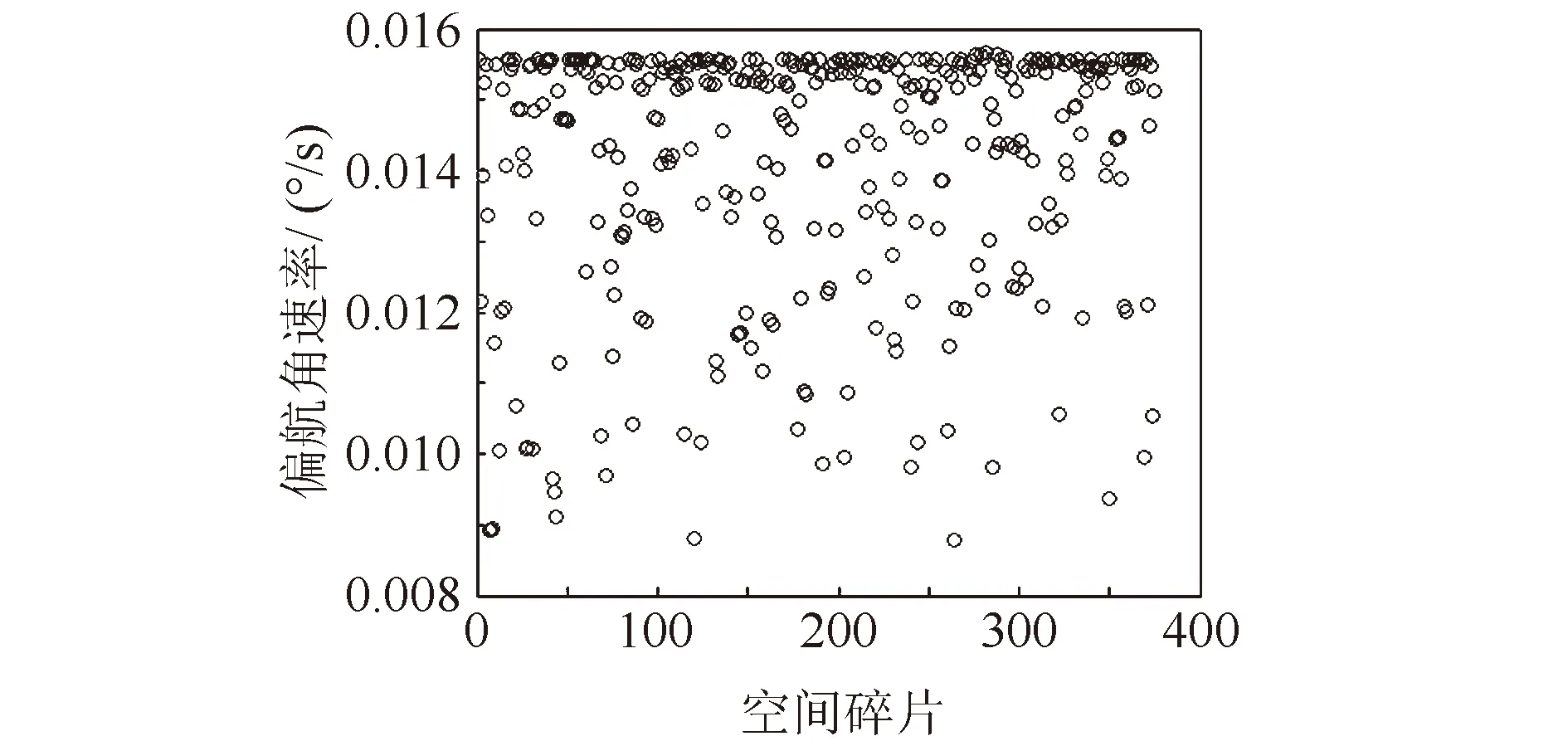
图6 相对偏航角速率变化示意(北半球)Fig.6 Graph of relative yaw angle rate change(Northern Hemisphere)
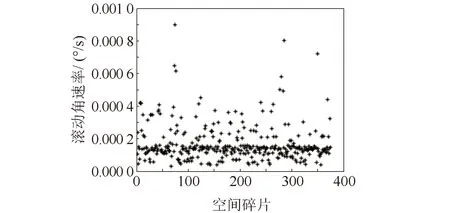
图7 相对滚动角速率变化示意(北半球)Fig.7 Graph of relative roll angle rate change(Northern Hemisphere)
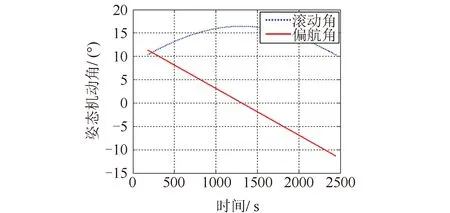
图8 姿态角变化情况(北半球)Fig.8 Graph of attitude angle change(Northern Hemisphere)
观测时间/min观测频次≥3次≥2次≥1次覆盖率/%≥3.011142372100≥2.014165372100≥1.014179372100≥0.515184372100≥0.015190372100
观测效能主要与卫星运动、轨道面进动、GSO空间碎片运动和卫星姿态机动相关。根据理论计算,卫星一轨运动引起的经度漂移为18.78°,轨道面进动引起的经度漂移约为0.032°,GSO空间碎片运动引起的经度漂移约为11.87°,卫星姿态机动引起的经度漂移约为21.74°,则卫星一轨的观测效能约为29.42°,GSO空间碎片相对像面的运动速率约为0.013 (°)/s,与仿真值每轨扫描经度带区域30.6°和相对运动速率低于0.016(°)/s较一致。仿真和理论计算的误差主要在于:理论计算考虑的是二体模型和标准地球静止轨道,而仿真采用以高精度的高斯摄动运动方程,并且选用的GSO空间碎片是依据Space-Track网站公布的实际在轨空间碎片,这些空间碎片轨道高度、倾角均有差异。
2.3 西半球观测
在2017年10月,地气光主要影响东半球,此时的空间碎片观测弧段只能选择在西半球进行,即在卫星过升交点前后共计37 min弧段。与北半球观测类似,卫星在升轨由南半球进入北半球后,要通过姿态偏航机动增加对GSO的扫描范围。利用穷举法可得,卫星在北半球的偏航机动角速率为0.015 (°)/s,总计机动16.2°。在此观测策略下,仿真得到GSO覆盖区域、空间碎片相对运动速率和姿态机动情况,分别如图9~12所示。卫星1天的观测效能见表2。
由图9和表2可知,选择在西半球每轨观测37 min,卫星姿态在滚动和偏航方向机动,每轨可扫描±2°纬度带、25.77°经度带,1天内对±2°纬度带遍历扫描,对其内372个空间碎片实现全覆盖,观测弧段超过3 min,空间碎片在像面两轴的运动速率不超过0.02 (°)/s。卫星姿态滚动方向最大机动角约为15.81°,最小机动角约为-1.54°,偏航方向从过升交点开始以0.015 (°)/s速率机动16.2°。在2017年10月,在区域凝视基础上增加姿态偏航方向机动,每轨在西半球进行37 min观测,可满足观测需求。
按照上述观测策略,理论计算卫星一轨的观测效能为24.24°,GSO空间碎片在像面的最大运动速率约为0.019 2 (°)/s。对比理论计算结果和仿真结果,观测效能和相对运动速率均比较接近。
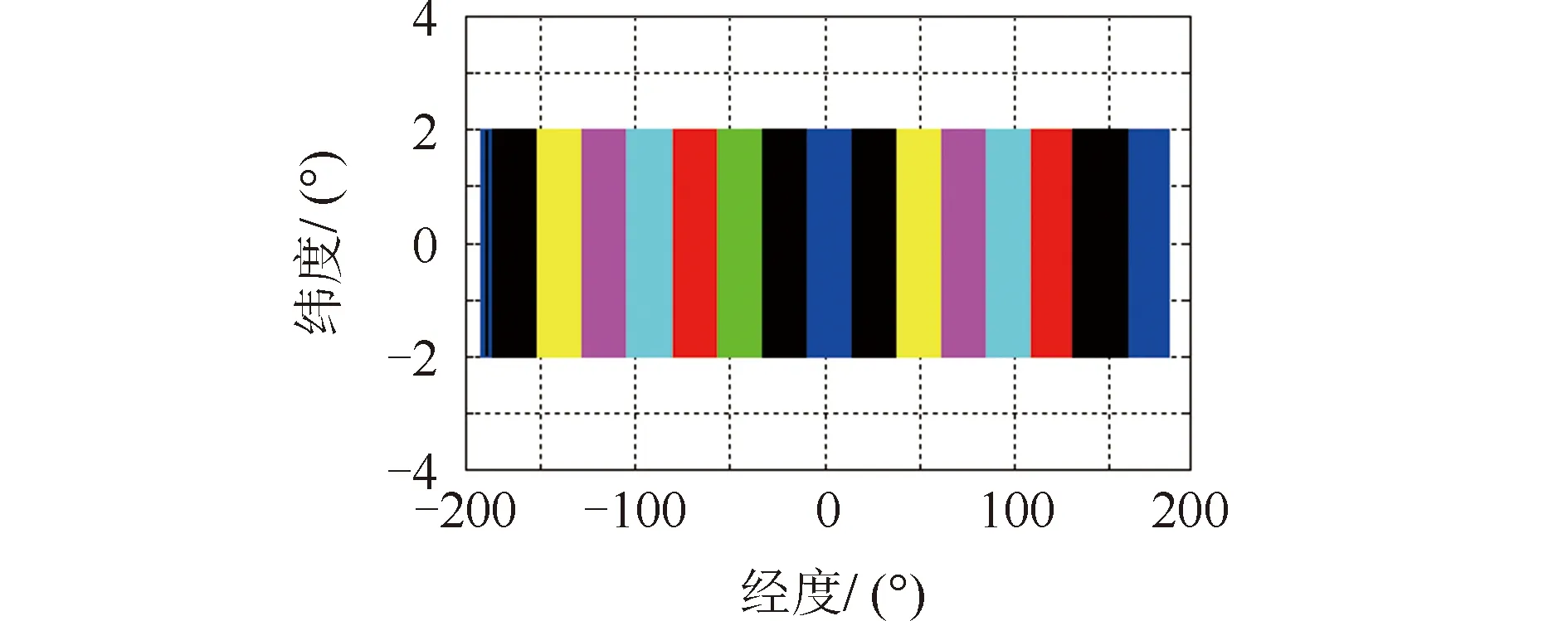
图9 GSO区域覆盖(西半球)Fig.9 Graph of covering GSO area(Western Hemisphere)
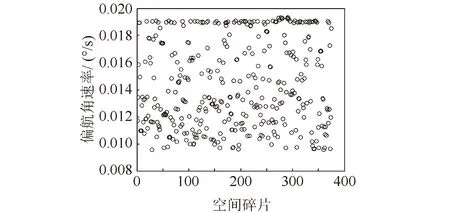
图10 相对偏航角速率变化示意(西半球)Fig.10 Graph of relative yaw angle rate change(Western Hemisphere)
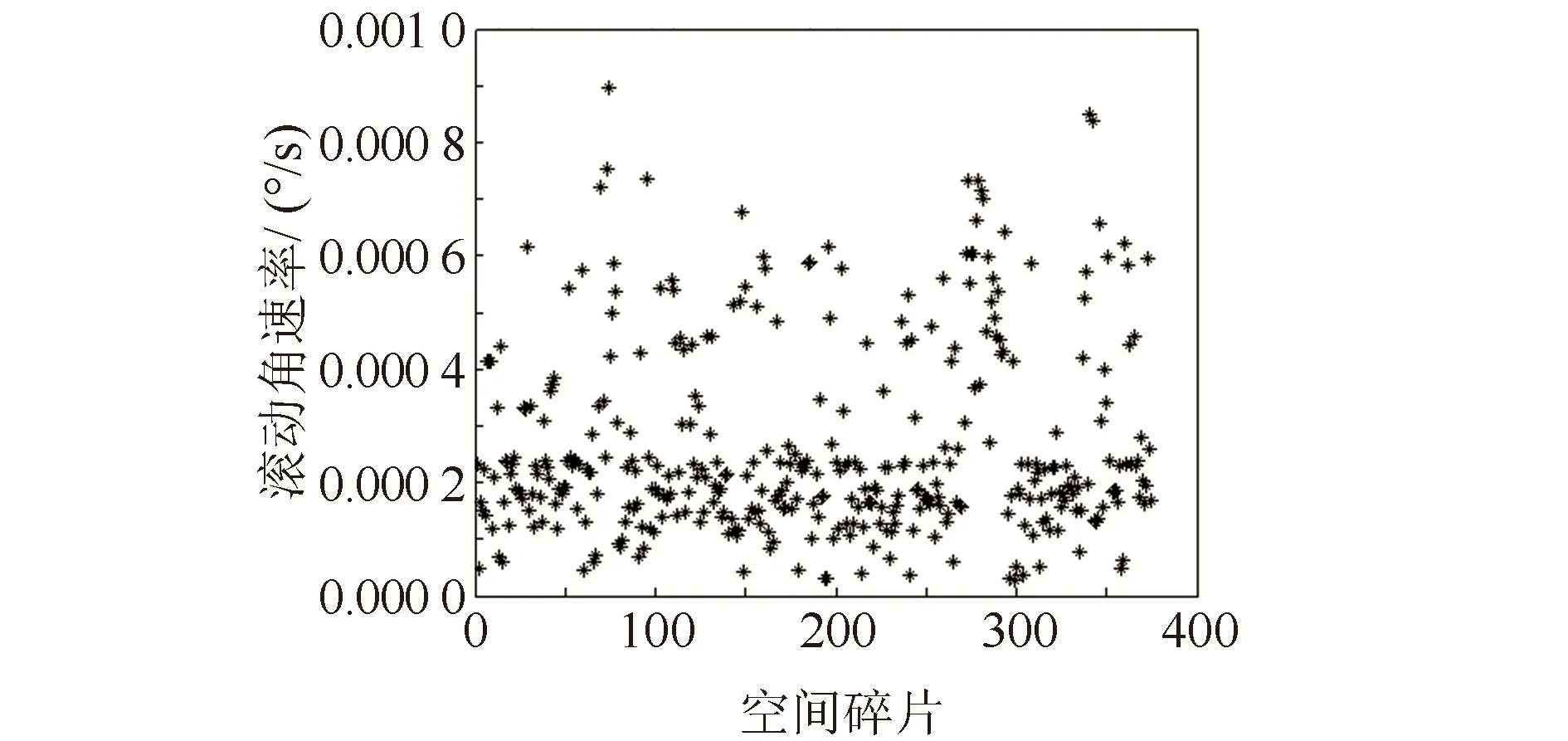
图11 相对滚动角速率变化示意(西半球)Fig.11 Graph of relative angle roll rate change(Western Hemisphere)
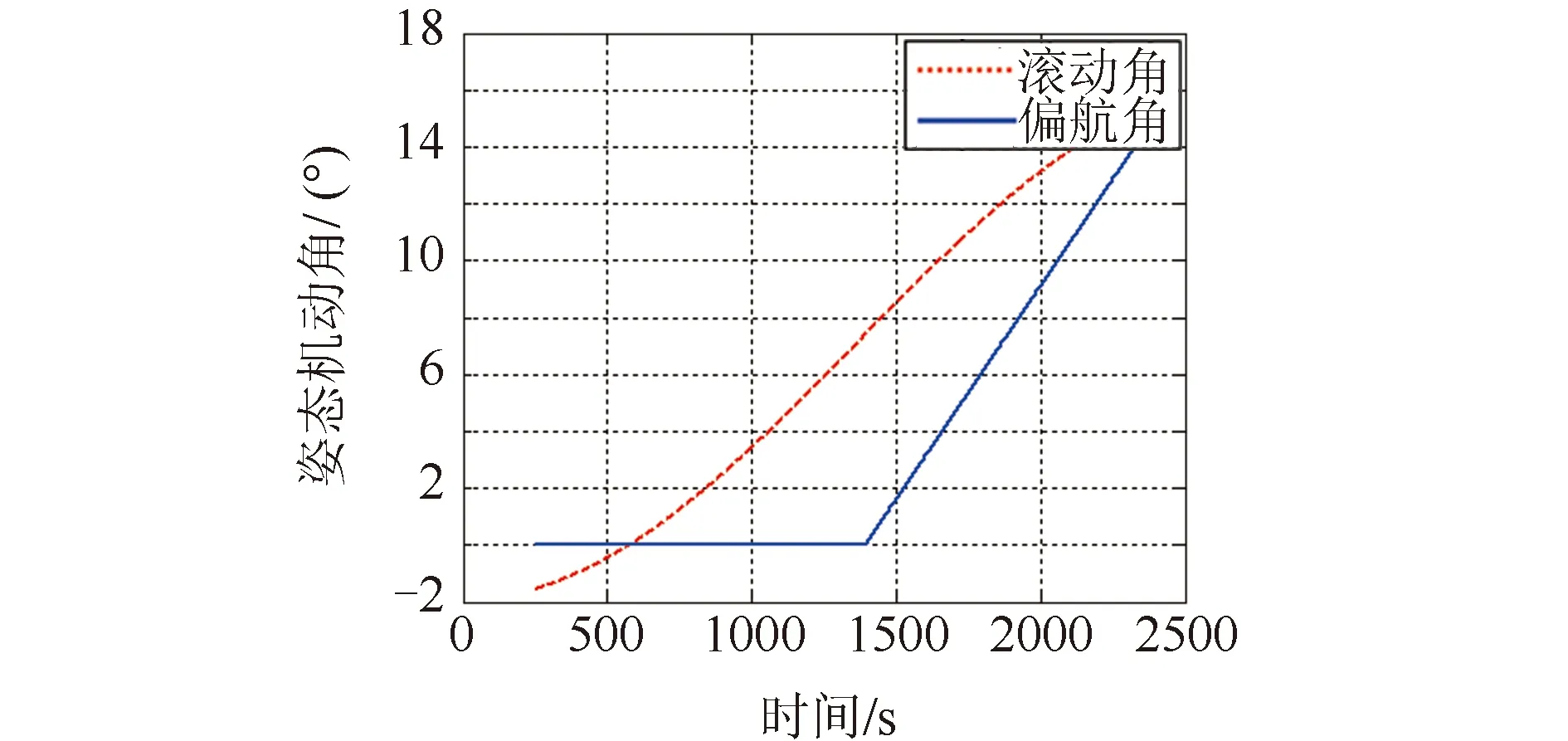
图12 姿态角变化情况(西半球)Fig.12 Graph of attitude angle change(Western Hemisphere)
观测时间/min观测频次≥3次≥2次≥1次覆盖率/%≥3.0356372100≥2.0384372100≥1.05106372100≥0.55120372100≥0.07134372100
2.4 东半球观测
同理,在2018年2、3月,卫星的观测弧段为东半球,即在过降交点前后49 min。卫星在降轨通过降交点之前,要在姿态偏航方向机动,以增加对GSO的扫描范围。利用穷举法可得,卫星的偏航机动角速率为0.015 (°)/s。在此观测策略下,仿真得到GSO区域覆盖、空间碎片相对运动速率和姿态机动情况,分别如图13~16所示。卫星1天的观测效能见表3。
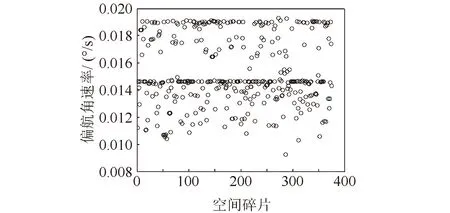
图14 相对偏航角速率变化示意(东半球)Fig.14 Graph of relative yaw angle rate change(Eastern Hemisphere)
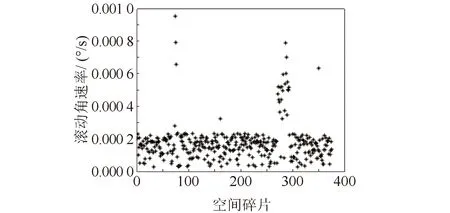
图15 相对滚动角速率变化示意(东半球)Fig.15 Graph of relative roll angle rate change(Eastern Hemisphere)
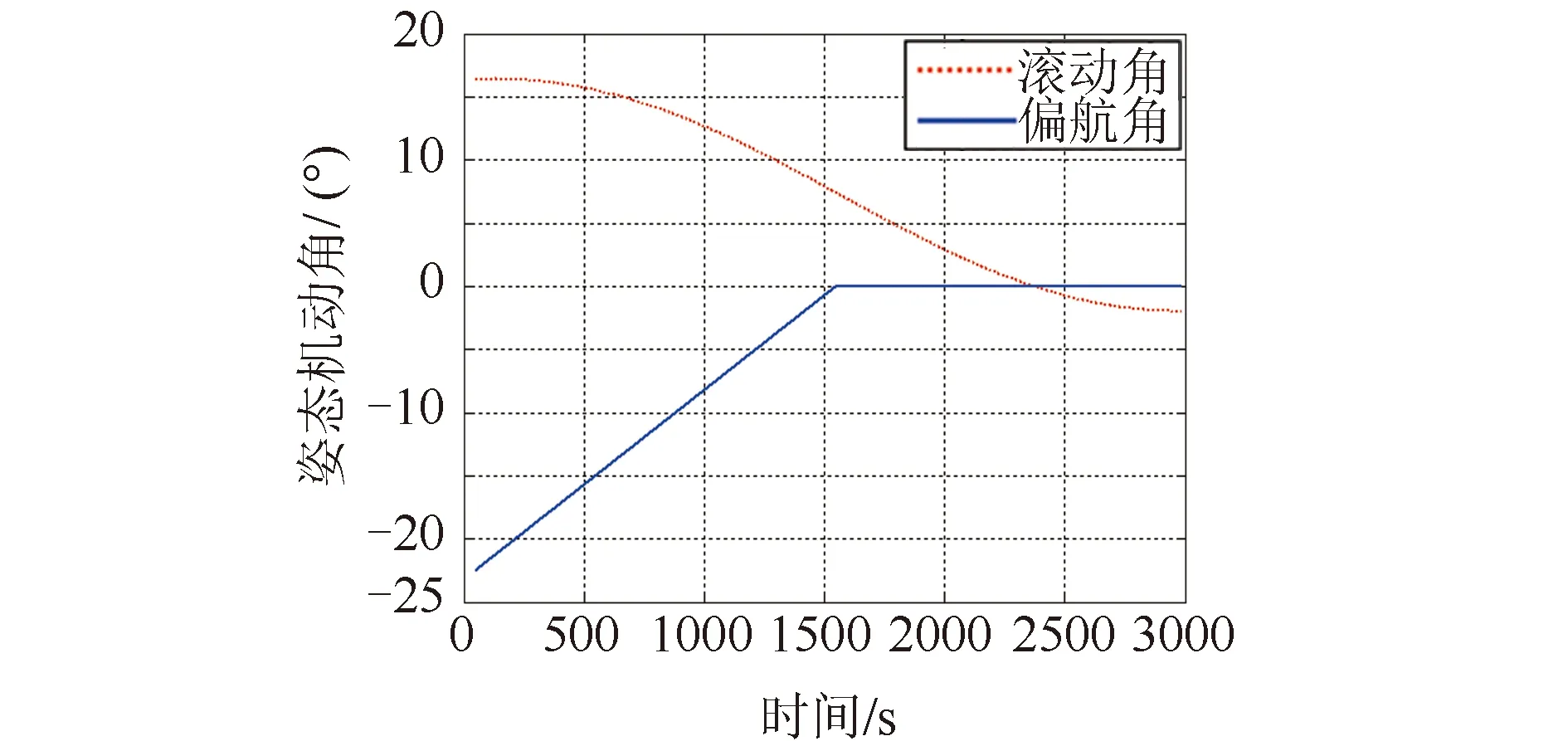
图16 姿态角变化情况(东半球)Fig.16 Graph of attitude angle change(Eastern Hemisphere)
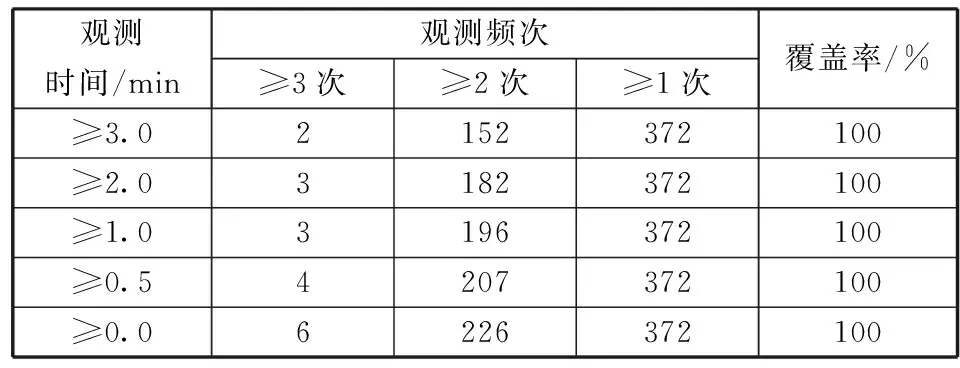
观测时间/min观测频次≥3次≥2次≥1次覆盖率/%≥3.02152372100≥2.03182372100≥1.03196372100≥0.54207372100≥0.06226372100
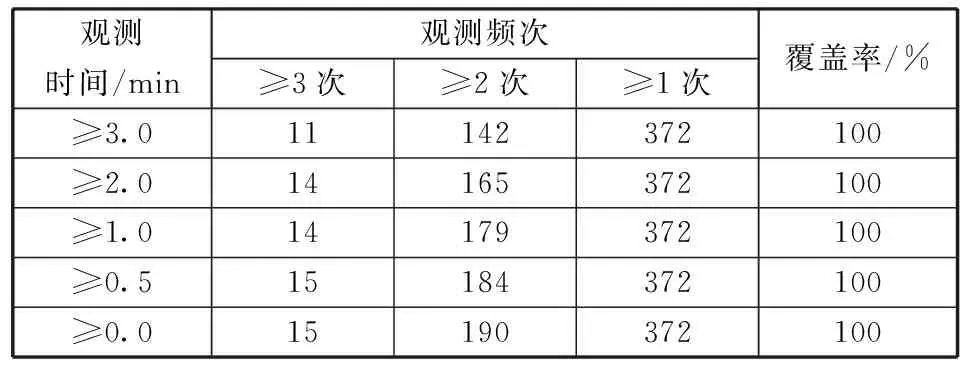
由图13和表3可知,选择在东半球每轨观测49 min,卫星姿态在滚动和偏航方向进行机动,每轨可扫描±2°纬度带、33.99°经度带,1天内对±2°纬度带遍历扫描,对其内372个空间碎片实现全覆盖,观测弧段超过3 min,空间碎片在像面两轴的运动速率均小于0.019 5 (°)/s。由图16可知,卫星姿态滚动方向最大机动角约为16.41°,最小机动角约为-1.98°;在过降交点之前,偏航方向从22.5°开始,按照0.015 (°)/s的速率机动到0°,之后偏航方向不作机动。因此,在2018年2月和3月,在区域凝视基础上增加姿态偏航方向机动,每轨在东半球进行49 min观测,可满足观测需求。
按照上述观测策略,理论计算卫星一轨的观测效能为34.35°,GSO空间碎片在像面的最大运动速率约为0.019 2 (°)/s。对比理论计算结果和仿真结果,观测效能和相对运动速率均比较接近。
2.5 对比分析
地气光影响随季节变化而变化,本文利用传统卫星光学遥感器的杂光抑制设计,结合所设计的姿态机动,实现了卫星全年对GSO空间碎片1天1次遍历观测,并且姿态机动量均控制在20°以内,不会影响卫星上电能供给环境。采用传统光学遥感器的杂光抑制技术,结合具有最高观测效率的区域凝视模式[11],与本文方法的观测效能对比,见表4。
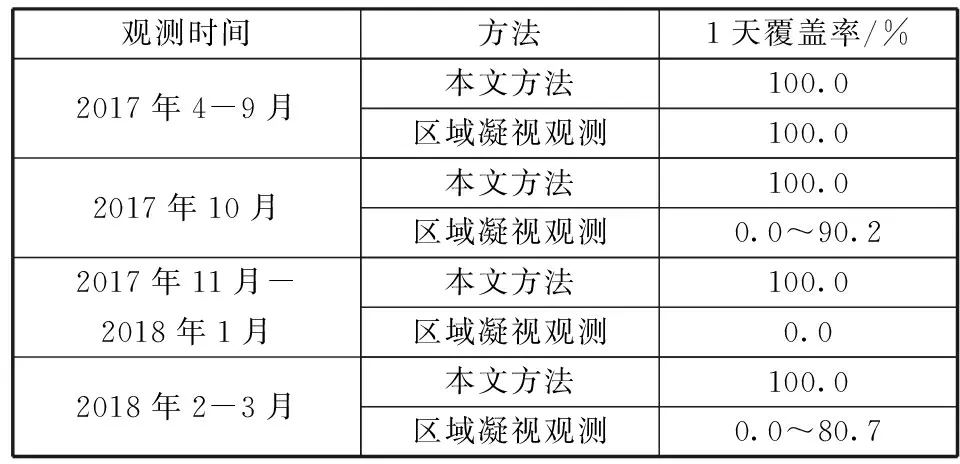
表4 两种方法观测效能对比
采用区域凝视观测,由于地气光影响的约束,观测效能无法达到全年中每天都能遍历某纬度GSO空间碎片1次。想要遥感器在全年的观测效能都能达到要求,就要提升其地气光的抑制能力,使全年在南半球观测40 min不受地气光影响。不过,针对暗弱空间碎片观测遥感器的地气光抑制技术,一直是一个难点。本文在某卫星遥感器地气光抑制设计的基础上,通过增加遮光罩长度、优化挡光环数量、优化次镜遮光罩设计、改进遮光罩喷漆工艺等措施,仿真得到改进后的遥感器杂光抑制能力(即观测效能随时间的变化),如图17所示。
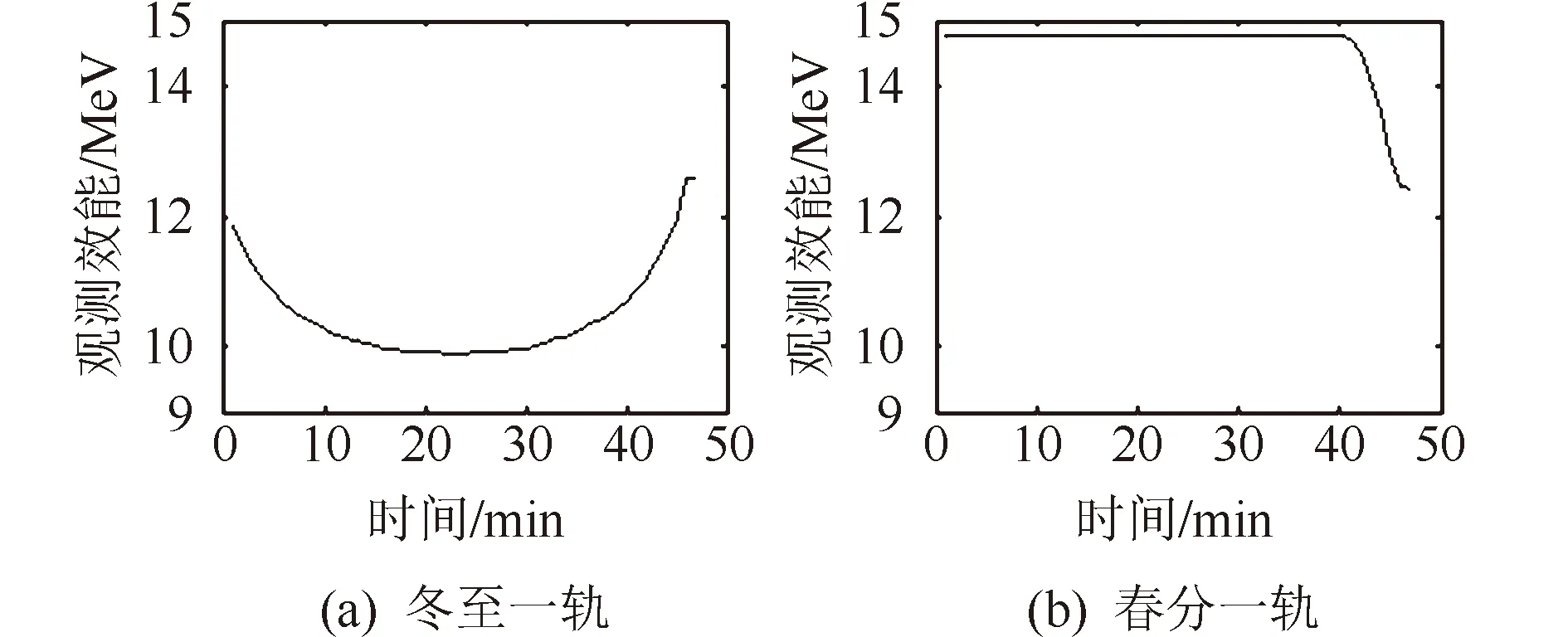
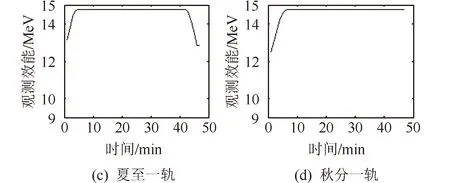
图17 遥感器观测效能的变化Fig.17 Graph of sensor observation effectiveness change
由图17的仿真结果可知,采用了上述措施,不仅增加了遥感器的质量、尺寸,还增加了遥感器的光学设计和工艺制造难度。即便如此,也很难在冬至前后使遥感器的杂光抑制能力满足14 MeV以上暗弱空间碎片的观测要求。因此,在GSO空间碎片观测中,采用传统被动规避地气光方法技术难度很大,代价也很高。而本文方法简单、有效,先计算出卫星不受地气光影响弧段,并以此作为遥感器的观测弧段,同时通过设计姿态机动弥补在北半球观测所损失的观测效能,最后在不影响观测效能的前提下很好地解决了地气光的影响问题。
最后需要说明的是,虽然仿真算例是针对±2°纬度带GSO空间碎片的观测,但是本文方法可适用于不同纬度的GSO空间碎片扫描观测。
3 结束语
本文针对天基光学空间碎片观测中的地气光规避问题,突破传统通过改善遥感器光学系统设计来提高地气光抑制能力的研究思路,提出一种利用卫星姿态调整规避地气光影响的方法,并给出了500 km太阳同步晨昏轨道卫星全年的观测策略以及观测效能。基于仿真结果,可以对实际空间碎片的观测效能提供仿真评估依据,对天基光学空间碎片观测中的地气光规避措施提供参考。本文在进行姿态导引律设计时,偏航方向设计为匀速运动。在实际任务中,可根据卫星的姿态机动能力,将偏航角速率设计成变化值,以提高遥感器的观测效能。
References)
[1] 原育凯,陈宏宇,吴会英.在轨航天器地气光环境分析[J].北京航空航天大学学报,2011,37(2):136-139
Yuan Yukai, Chen Hongyu, Wu Huiying. In-orbit spacecraft’s earth and atmosphere radiation environment analysis [J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(2): 136-139 (in Chinese)
[2] Endelman L L. Hubble space telescope: mission, design, problems, and solutions [J/OL]. [2017-10-12].https://www.spiedigtallibrary.org/conference-proceeedings-of-spie/2513/1/Hubble-space-telecope-mission-design-problems-and-solutions/10.1117/12.209584.full
[3] Vogel G. The clearest view: Hubble telescope to get an upgrade [J]. Science, 1997, 275(5300): 611-612
[4] Gaposchkin M E, Braun C, Sharma J. Space-based space surveillance with the space-based visible [J]. Journal of Guidance Control and Dynamics, 2000, 23(1): 148-152
[5] Harrison D C, Chow J C. The space-based visible sensor [J]. Johns Hopkins APL Technical Digest, 1996, 17(2): 226-236
[6] Leitch R, Hemphill I. Sapphire:a small satellite system for the surveillance of space [C]//Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites. Washington D.C.:AIAA, 2010: 1-13
[7] Morris K, Rice C, Little E. Relativecost and perfor ̄mance comparison of GEO space situational awareness architectures [C/OL]. [2017-10-12]. http://www.amostech.com/TechnicalPapers/2014/Poster/MORIS.pdf
[8] Lightsey P A, Wei Z Y. James Webb space telescope observatory stray light performance [J/OL]. [2017-10-12].https://www.spiedigtallibrary.org/conference-proceeedings-of-spie/6265/1/James-Webb-Space-Telescope-Observatory-stray-light-performance/10.1117/12.672102.full
[9] Skelton D L. Applying the tool: stray light cross-checks of the James Webb space telescope [J/OL].[2017-10-12].https://www.spiedigtallibrary.org/conference-proceeedings-of-spie/7731/1/Applying-the-tool-stray-light-cross-checks-of-the /10.1117/12.856722.full
[10] 余建慧,苏增立,谭谦.空间目标天基光学观测模式分析[J].量子电子学报,2006,23(6):772-776
Yu Jianhui,Su Zengli,Tan Qian.Analysis on the space-based optic observation mode for space object [J]. Chinese Journal of Quantum Electronics, 2006, 23(6): 772-776 (in Chinese)
[11] 周美江,朱振才,杨根庆,等.天基光学同步带目标监视跟踪模式[J].中国空间科学技术,2015,35(3): 35-43
Zhou Meijiang, Zhu Zhencai, Yang Genqing, et al. GEO objects surveillance and tracking mode of space-based optical system [J]. Chinese Space Science and Technology,2015,35(3): 35-43 (in Chinese)
[12] 章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,1998
Zhang Renwei. Satellite orbit and attitude dynamics and control [M]. Beijing: Beihang University Press, 1998 (in Chinese)
猜你喜欢
中学生数理化(高中版.高一使用)(2021年3期)2021-06-09
学生天地(2020年3期)2020-08-25
军事运筹与系统工程(2019年3期)2019-08-13
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
汽车观察(2018年9期)2018-10-23
中学化学(2016年10期)2017-01-07
诗选刊(2015年4期)2015-10-26
食品工业科技(2014年23期)2014-03-11
阅读(中年级)(2009年11期)2009-04-14