压铸机周边取件手的设计
2017-03-09 09:40:50王文博刘跃坤周黎明
时代农机 2017年12期
王文博,刘跃坤,周黎明
(商丘工学院,河南 商丘 476000)
1 蜗轮连杆机械的总体设计方案
此设计的机械手由电机和气缸来驱动。利用四杆机构原理实现手臂的旋进和旋出。当手臂旋进后,整体机身会有一个横行前进的位置。当整体机身横行前进到手爪能完全夹取产品的料柄时,手爪夹紧。夹取完后手臂旋出至后退限,手爪有一个90°的翻转过程,然后松开手爪将压铸件放至传送带。
2 蜗轮连杆机械手的组成和特点
蜗轮机械手是由底座、横行机构、取出机构组成。连接电机的减速箱固定安装在工作面板的下方作为一个整体套装在横行导杆上;取出机构的支撑杆安装在工作面板上并和手臂连接以起到支撑手臂的作用,主动杆与主动轴和手臂连接,带动手臂和支撑杆进行运动,取件机械手的取出机构各关节点均为转动副。
3 蜗轮连杆机械手的设计
蜗轮连杆机械手设计的原始数据如表1所示。

表1 蜗轮连杆取出机的设计基础参数
3.1 手臂和夹爪的设计方案
本机械手采用的是连杆式回转机构,用伺服电机进行驱动。根据要求最终尺寸确定如下:主动杆:443mm;副杆:550mm;主副杆间的连杆:219mm;手臂总长:1140mm;主动杆和副杆安装点的中心距:250mm;分量dx=112mm,dy=219mm,主动杆的回转角度为150°,副杆的回转角度为100.84°。
根据原始数据可设计其手爪所夹取的工件料柄直径范围为Ф50mm~Ф90mm,选取所夹取的料柄直径为Ф60mm。所夹取的工件重量选取4kg。驱动手爪夹紧和松开所用气缸的行程为20mm,手爪夹紧时所张开的角度为55.05°,手爪松开时张开角度为84.86°。
3.2 相关设计计算
首先需计算出手臂需要的转矩及功率,从而再确定出电机的功率、转速和型号等。经计算,可选取的电机型号为TCBP7112 0.37kW B3。
(1)横行气缸的设计。机身进行水平横行伸缩运动时,不仅要克服摩擦阻力(包括气缸与活塞之间的摩擦阻力、导向杆与轴承套之间的摩擦阻力等),还要克服启动、停止过程中的惯性力以及背压等几方面的阻力。计算后选择横行气缸型号SCA2-50-250。
(2)夹爪旋转气缸的设计计算。当手臂旋出至后退极限位置时,手爪需要一个将物料由水平方向转至竖直方向的翻转动作,然后夹手松开,放开物料,这样放置物料更方便,不会导致物料损坏。
①手爪驱动力的计算。图1为连杆杠杆式手爪结构,对其进行手爪受力分析。作用在治具缸接头1上的驱动力为F,两连杆2对治具缸接头的反作用力为F1、F2。
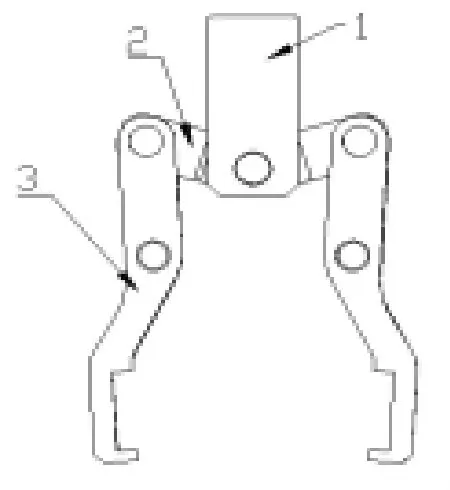
图1 连杆杠杆式手爪结构
手指对工件的夹紧力可按下式计算:

式中:K1为安全系数,取K1=6;K2为工作情况系数,K3为方位系数,根据《工业机械手设计》表2选取K2=5;G为被抓取工件所受重力(N),G=40N。由式(1)中的手爪结构的受力分析驱动力F,由连杆杠杆式结构的驱动力计算得:F计算=970.89N。取手指传力效率η=0.8;则:F实际=1088.61N。
③夹紧缸的结构尺寸计算。手爪的驱动方式为气动方式,即运用气缸驱动。所选用的气缸为单作用弹簧复位气缸,其工作压力为0.5MPa。选用气缸为SDA-63-20-B。
根据前面所所述及相关计算,得出部分结构设计参数如下:蜗杆减速器的模数2,减速比60,蜗杆分度圆直径25mm,蜗杆头数1,蜗轮齿数60;选用TCBP7112 0.37kW B3型号的电机;选用横行气缸的型号为SCA2-50-250;选用AD-2525型号的缓冲器;选用的夹爪旋转气缸型号为QGK-2RSD40T9 0-A2;选用SDA-63-20-B型号的夹紧缸。
3.3 机身设计
机身是直接支撑和驱动手臂的部件。一般实现臂部的升降、回转或俯仰等装置或传动件都安装在机身上,或者直接构成机身的躯干与底座相连。因此,臂部的运动越多,机身的结构和受力情况就越复杂。
臂部和机身的配置形式基本上反应了机械手的总体布局。机械手的机身设计成机座式,这种机械手是具有横行前进功能的,当然在某些情况下也可以撤销横行前进的功能,这要视具体的工作情况而定。此次所设计的机械手具有横行前进功能。
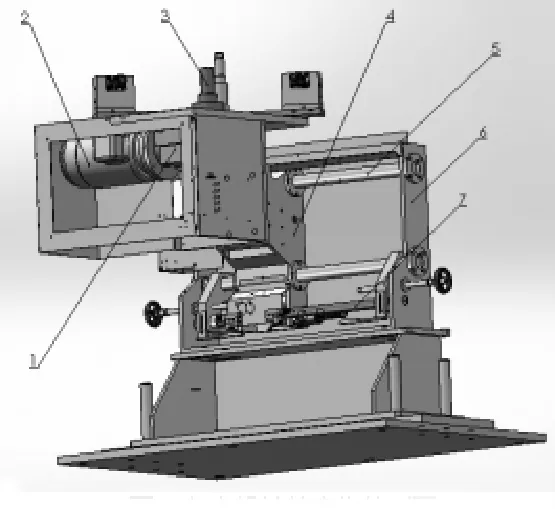
图2 机身设计的轴测实物视图
如图2所示为机身的轴测实物视图,地基板与底座相固定,地基板固定于底面上,而横行座固定在底座上面。轴承套通过固定在横行座上的两导杆而固定在横行座上,在横行坐的左面固定安装一气缸,气缸的活塞杆与轴承套相连接,而轴承套的正面与横行箱体通过螺栓相连接,刹车电机与涡轮减速箱相连接,两部分作为整体与横行箱体相连接,这样就可以将整个装置紧密的连接在一起。在给气缸通气后,气缸通过活塞杆将轴承套向前推动,这样轴承套就可以带动箱体整体一起运动,达到机身的横行前进。箱体的两极限位置是由安装在轴承套上的微动开关座上的两行程开关来控制控制箱体的开始位置以及停止位置。微动开关的开闭是通过固定在导杆和辅助导杆上的横行撞块上的微动开关撞块来实现的,当箱体运动到左边微动开关位置时,触碰微动开关闭合,这样控制系统将接受信息,控制气缸进气,这样横行箱体将停止在极限后退位置上,同理当箱体运动到右边触碰到右边的微动开关闭合时,控制系统接受信息,控制气缸进气,箱体将停止在前进极限位置上。两横行撞块的安装位置将影响整个箱体的开始位置和终止位置。手臂是通过安装在减速箱上的涡轮轴心和箱体上的副轴心来固定位置的,这样就可以带动整个手臂以及手爪运动。
4 结语
文章在得到取件机的大致结构尺寸及基本参数之后,对蜗轮连杆取件机械手的手臂和夹爪进行方案设计,并且对驱动电机、蜗轮减速箱、横行气缸、缓冲器等进行了计算和选型。
猜你喜欢
机械设计与制造工程(2021年3期)2021-04-16 14:48:46
中国特种设备安全(2019年8期)2019-10-14 00:32:34
电子制作(2018年24期)2019-01-03 02:30:30
雷达学报(2018年5期)2018-12-05 03:13:08
宇航计测技术(2018年3期)2018-09-08 02:21:26
荣誉杂志(2017年7期)2017-08-23 08:05:59
柴油机设计与制造(2015年3期)2015-12-05 06:29:31
邵阳学院学报(自然科学版)(2015年2期)2015-06-05 12:22:39
机械工程师(2015年10期)2015-02-02 01:13:42
机械工程师(2014年12期)2014-12-23 06:44:04