针对旋转手爪的结构设计与分析
2019-01-03 02:30钱瀚翔
电子制作 2018年24期
钱瀚翔
(南京市第十三中学,江苏南京,210008)
1 旋转手爪概述
旋转手爪在接收到抓取工件信号后,按指定的路径抓取物体,并要求在规定时间内完成相应动作[1]。旋转手爪在抓取物体过程中,为了确保能够准确的抓住物体,这就要求旋转手爪在开合时的张角应尽可能的大,以提高旋转手爪抓取物体的准确性;此外,为保证旋转手爪在抓取时不会因为手爪的不协调而导致被抓取的物体脱离,手爪也需具备同步性。旋转手爪在结构上具有一定的稳定性,所选材料应具备韧性和一定的硬度,以确保在运输途中不会因为旋转手爪结构的不稳定与材料的损坏导致物体的脱落。另外,手爪在抓取到物体或物体因各种原因错误脱落之后,应通过传感设备向控制中心反馈,从而继续或者是终止后续的步骤。
1.1 应用场景分析
旋转手爪在许多高新产业中应用广泛,尤其是在机器人和仿真领域,旋转手爪就显得必不可少。旋转手爪虽然不像人手那样灵活,但它具有能不断重复工作和劳动,得到了较为广泛的运用[2]。旋转手爪在实现机器人各项功能中起到至关重要的作用,不仅提高了机器人的工作效率和工作质量,而且还使机器人外观与功能逐渐接近人类,所能完成的任务也越来越多。通过旋转手爪我们不仅可以完成一些简单的抓取任务,就连工业上一些危险的抓取任务,细小零件的精准拾取,也可以通过旋转手爪来实现。
1.2 类型形式
随着机器人应用范围的日益扩大,旋转手爪也日益朝着智能化,类人化的方向发展。首先,在医疗方面,事故中断手的残疾人日益增多,因此对更加灵活,性能优越的旋转手爪的需求便逐渐增多。其次,近年来国内许多地区都出现了用工短缺和劳动成本上升的问题,所以旋转手爪必须承担起建筑材料的运输,各种建筑必需品的搬运等最基础的任务;旋转手爪在工业上的作用也不可小觑,小到物品的运输,大到零件的加工与生产,都可以交给旋转手爪实现。因此,旋转手爪的使用范围十分广泛。
1.3 应用前景
我国工业机器人从80年开始起步,在国家的支持下,顺利通过“七五”“八五”的科技革新,掌握了大部分机器人生产技术,但由于我国起步较晚,整体实力依然和外国有一定差距。就拿旋转手爪来说,国内生产的旋转手爪精度不高,价格普遍较贵,因此旋转手爪大都依靠外国进口。更重要的是,我国至今仍未形成专门的机器人产业,技术还未成熟,缺少专业的人才,所以从整体上来看,我国机器人技术依然有很大的提升空间,仍然需要不断地刻苦钻研与国内外的机器人研究行业的顶尖人才的不懈努力[3]。
旋转手爪在发展中,首先需要的就是精确性的提高。众所周知,旋转手爪工作时会产生一定的误差,如何有效的减小和预测误差便是未来手爪的发展趋势。随着微电子技术和现代控制技术的发展,旋转手爪的精度也会越来越高,那么它的应用范围也将更加广泛,如医疗设备的运输,核工业,军事工业等。不仅如此,随着电子元件的发展,机电一体化也即将广泛运用,如果旋转手爪具有一定的感应功能,在未成功抓取时通过旋转手爪内部的敏感元件来做出反馈调节,重新调整手爪的位置以成功抓取物体,并通过手爪前部的压力敏感元件控制力的大小,达到自动控制的目的。总之,随着科技的不断进步,旋转手爪配合作业的能力也将大大提升,运用范围也将不断扩大。
2 机构方案设计
旋转手爪可以看作一个模块化的机械产品,因为具有一般机械共有的三部分,即动力源、传动机构和执行端。对于旋转手爪而言,其执行端是手爪末端的夹爪,用来实现物料的抓取,动力源是电机,需要进行选型和安装设计,而传动部分为旋转手爪机构设计的主体部分,选用的传动形式决定着手爪的性能和工作效率。
2.1 手爪的功能及需求分析
在实际生活中,旋转手爪大多都应用在手术室巡检机器人、环境监测和实时监控、护士车的自主搬运等方面。就拿对护士车的抓取来说,现在可以想到的有两种形式:背负式和牵引式。背负式是指机器人钻进负载底下,启动自身的抬升装置,从而将负载抬起从而实现搬运的一种运输方法。但背负式有一个很大的缺陷,就是在机器人启动自身的抬升装置时,只要抬升的高度有一点点细微的差距,便会破坏整个搬运物体的平衡性,使被搬运物体产生一定的倾斜,十分不稳定。而对于手术室巡检机器人,这样的运输方式显然是不可取的,因为被搬运的大多都是医疗器械,既危险又容易破碎。但是牵引式就不同,牵引式只是给物体一个水平向前的拉力,并不会使之倾斜,所以我们对于护士车的搬运是采用牵引式。
对护士车的抓取这个过程中只涉及手爪的抓取与松脱,所以我们只需要一个单自由度的夹爪即可。单自由度的夹爪可分为两类,移动式和旋转式。移动式指的是手爪的一端在直线上移动从而带动手爪的张开与闭合,手爪活动的范围大大受到直线总长的影响,但是机器人伸出去的手爪并不能做得太宽,所以移动式有些不符合要求。旋转式指的是手爪绕着两个定点旋转,通过齿轮的转动带动手爪的开合。相比之下,当旋转式和移动式抓取几率相等时,旋转式所手爪占的体积较小,更适合小型的机器人。此外,智能机器人都有定位偏差,这个偏差在1cm左右浮动,是现在技术所不能避免的,更何况我们在实现抓取时出于种种原因导致手爪没有对准的情况是很常见的,所以我们需要一个容错率较高的手爪。旋转式手爪在抓取时手爪张开的角度比较大,故抓住的几率也大大提高,虽然偏差避免不了,但是通过增大手爪抓住的几率,也相当于变相减少了误差,因此选用容错率较高的旋转手爪。
考虑到机器人是在医院的走道中,穿越人群运输医疗用品,它的总体尺寸不能过于庞大,以免导致医院里的交通堵塞,给医院增添负担。其次,从布局上看,旋转手爪是安置在机器人的尾部的小凹槽中的,所以它的体积也不能过大,我们设定手爪的外形尺寸约为100×70×40mm。此外,抓取物体之后,如果要实现对护士车的抓取和正常运输,夹爪的末端的保持力便必不可少。经过实际的测量,我发现夹爪末端的保持力需在6N,才能保持稳定的运输。对于物体的夹取,由于没有时间上的限制,所以我们对转速要求并不高。
2.2 不同机构形式比较
考虑到机器人在医院走廊这个交通比较拥挤的场所,所以整体尺寸应较小,能够尽量减少交通拥堵,同时也要具备一定的灵活性,能避让行人。由此可见,机器人留给旋转手爪的空间自然就很少,故不采用链传动或带传动等规模较大传动形式。其次,为了防止旋转手爪在抓取时不会因为手爪的不协调而导致被抓取的物体脱离或由于一部分手爪的未闭合而导致手爪的错位,所以两边的手爪应该要有完全同步性。根据以上几点,我们筛选出了两种既不占用体积,又使得两边手爪具有完全同步性的传动方式:齿轮传动或蜗轮蜗杆传动。齿轮传动顾名思义,就是通过中心齿轮的转动带动小齿轮的转动,从而使两端的手爪完成指定的运动。至于蜗杆传动,实际上是两个轴线相互垂直的蜗轮和蜗杆之间的传输。电机带动蜗杆旋转,蜗杆又带动蜗轮旋转,从而使手爪转动,完成闭合。然而通过3D建模,我发现齿轮轮传动的确实现了两个手爪的同步转动,但两者方向相同,只能绕着同一个方向旋转,所以不能实现开合。而蜗轮蜗杆传动,既可以使得两侧夹爪具有完全同步性,同时又具有一定的自锁性,在断电时依然可以保持抓取的动作,这便是不选齿轮的第一点原因。不仅如此,就传动比而言,根据公式可知,齿轮传动的传动比为齿轮的反比,因此若要在现实中实现1:5的传动比,则需要满足大齿轮直径是小齿轮的5倍,这样却会使得齿轮体积过大,与实际需求的较小的尺寸相冲突,而蜗轮蜗杆传动比为头数和轮齿数的比,因此传动比大且机构整体体积也很小。
蜗轮蜗杆传动具有自锁性,当蜗杆的导程角小于啮合齿轮的摩擦角时,只能通过蜗杆带动蜗轮转动[4]。在医疗搬运机器人拖拉小推车的过程中,即使突然断电,电机停止工作,旋转手爪也不会因此而将物体松开,而是依靠蜗轮蜗杆机构保持抓取状态。其次,蜗杆的反向自锁性也可以起到安全保护作用,防止手爪被扳开,如图1所示为蜗轮蜗杆实物图。

图1 蜗轮蜗杆实物图
涡轮蜗杆传动中,蜗杆转一圈时,蜗轮才转过一个啮齿的度数,大大提高了输出扭矩,因此自身也可以充当一个减速器,为其余元件的安装省下空间,也减小了旋转手爪的整体体积,更加适合体型较小的机器人。除此之外,蜗杆还具有结构紧凑,承载力高、传动平稳,噪音很小等特点,适合在医院这种安静的场合下工作。
蜗轮蜗杆机构也存在一些缺点,其传动效率很低,理论上只能达到60-70%。一些自锁性较强的蜗杆效率更低,在实际操作时效率低于50%。相比之下,齿轮传动便具有效率上的优势,传动效率能达到90%,大大节省了能源的消耗。另外,涡轮蜗杆间相对滑动速度大会使得啮齿之间磨损严重,发热严重,既降低了机械效率,又要求用一些价格较昂贵的耐摩擦且耐热的金属与相应的润滑设备,因而成本较高[5],而齿轮使用更为普遍,且价格低廉。
综合考虑,虽然蜗轮蜗杆成本较高,机械效率偏低,但其具有较好的自锁性、且占据体积小、能提供较大的扭矩,因此选择蜗轮蜗杆传动形式。
3 结构设计与分析
经过对旋转手爪的机构方案设计,选定了蜗轮蜗杆的机构传动形式,对手爪进行结构设计,首先需要对电机进行选型及安装设计,其次对主传动机构进行设计和建模分析,并对其他部件进行结构设计。
3.1 电机的选型
考虑到使用电机的类型,由于尺寸小、需要的扭矩较低,因此选用直流电机。在电机选型时,需要考虑其整体尺寸和能够提供的力矩,以及工作时的转速要求。
3.2 蜗轮蜗杆设计分析
蜗轮蜗杆传动会造成一定的磨损,其失效形式主要是齿面胶合、点蚀和磨损。蜗轮与蜗杆间的相对滑动很大,故齿面间的摩擦与摩擦产生的热量很大。齿面胶合,是指当齿轮持续运转时,由于两齿轮的相对滑动,在齿轮表面撕成沟纹。点蚀又称为孔蚀,是一种集中于金属表面很小的范围并深入到金属内部的腐蚀形态,一般直径很小但是深度深。机械磨损是指两相互接触产生相对运动的摩擦表面之间的摩擦将产生组织机件运动的摩擦阻力,引起机械能量的消耗并转化而放出热量,使机械产生磨损[6]。这三种失效形式通常发生在轮齿上,久而久之,会使得蜗轮啮齿发生断裂,引起机械故障。因此在设计过程中,通常选用既耐高温又耐磨损且具有一定惰性的材料。对于微观材料而言,其物理特性决定了其所能承受的力是有一定的限度的,选用的轮齿材料时也是如此。考虑到齿轮的承载力有限,所以根据蜗轮齿面接触疲劳强度条件,计算蜗杆传动的承载能力,以防止蜗轮因受力过大而大大加快侵蚀或者崩裂等造成的不必要的损坏。
3.3 其他结构细化设计
前述对电机和蜗轮蜗杆进行了选型和结构分析,接下来需要对实际零件的固定与组装进行分析。手爪的结构模型如图2所示。首先是电机与涡轮蜗杆的固定,可以使用联轴器进行固定。考虑到整体尺寸大小及降低成本,可以通过结构设计将电机输出轴直接与蜗杆连接。蜗杆两端需要进行轴承的选型和安装设计,其中轴承外圈固定在手爪外壳上,内圈同转轴一起旋转。固定涡轮的转轴上连接手爪末端夹爪,其通过轴上定位零件带动与蜗轮实现同步转动。为了对手爪进行限位和定位,需要采用限位光电传感器,并选用编码器对电机的转动进行精确控制和反馈。
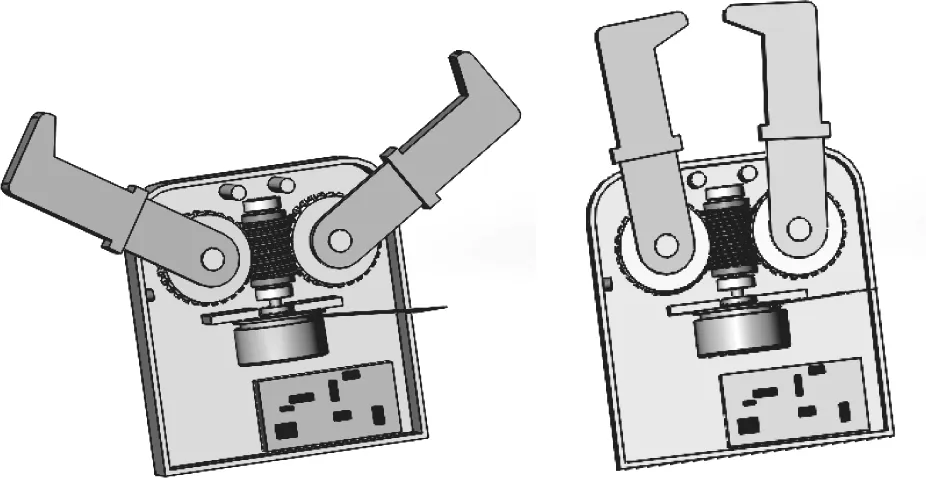
图2 旋转手爪的结构模型
4 结论
通过对旋转手爪的结构设计与分析,可得到以下结论:
(1)手爪需要实现单自由度的开合功能,选用旋转形式的手爪具有容错率高的特点,大大提高其工作稳定性;
(2)蜗轮蜗杆能提供大扭矩,具备自锁性,可实现两侧夹爪的运动同步性,并且所占空间较小,噪声较小;
(3)由电压、转速、扭矩及空间尺寸等因素进行电机的选型,可通过编码器实现对电机的准确控制;需采用限位传感器实现手爪极限位置的标定;
(4)手爪结构设计时需考虑中心距、传动比、安装方式等多重因素,实现空间的合理布置和零部件的完整固定。
猜你喜欢
汽车实用技术(2022年20期)2022-11-02
物流技术与应用(2022年8期)2022-08-26
汽车实用技术(2022年14期)2022-07-30
汽车工程师(2021年7期)2021-08-05
航天制造技术(2021年2期)2021-05-10
科技与创新(2020年7期)2020-04-26
科技信息·中旬刊(2018年9期)2018-10-21
汽车实用技术(2015年8期)2015-12-26
汽车实用技术(2015年8期)2015-12-26
速读·下旬(2015年12期)2015-10-21