
基于ABAQUS的EPS蜗杆副有限元分析
2022-11-02 08:52胡志锋
汽车实用技术 2022年20期
胡志锋,张 平
(长安大学 汽车学院,陕西 西安 710064)
汽车电动助力转向系统(Electric Power Steer- ing System, EPS)因克服了其它转向系统燃油消耗高、高速时转向“发飘”等缺点而被广泛采用,并成为汽车转向系统的发展趋势。渐开线蜗杆副作为EPS减速器的重要部件,具备结构紧凑、传动平稳等优点,但是其啮合性能较一般齿轮副更差,影响了其传动效率和使用寿命。所以,为了优化其啮合性能,提高其传动效率,有必要对蜗杆副啮合传动时的齿面受力情况以及传动效率进行分析。
关于渐开线蜗杆副的研究主要集中在三维实体建模方法研究和齿面接触应力分析两个方面。文献[1]利用Marc软件对蜗杆副的啮合齿面接触应力分布进行了分析,并从理论上探讨了降低摩擦系数,提高蜗杆副传动效率的方法;文献[2]利用UG进行二次开发,建立EPS用蜗杆副的自动建模系统,并基于建立的模型通过有限元法进行齿面接触应力分析;文献[3]根据蜗轮齿面方程,通过Matlab算出蜗轮齿面上的一系列插值点,然后通过CATIA拟合出蜗轮的齿面,从而建立蜗轮的精确模型,并在此基础上通过ANSYS-DYNA分析了蜗杆副在蜗轮转动一个齿过程中齿面接触应力、齿面变形及啮合运动规律;文献[4]利用KISSsoft建立三头蜗轮蜗杆三维模型,并运用Workbench对蜗轮蜗杆进行强度校核;文献[5]基于CATIA对电动助力转向器蜗轮蜗杆进行精确的参数化建模,并利用ANSYS软件对所建立的模型进行强度校核;文献[6]通过蜗轮齿面方程在Matlab中进行齿廓绘图,然后将齿廓导入SolidWorks完成蜗轮的实体建模,再通过软件ANSYS对蜗轮蜗杆进行了动态接触分析。关于基于ABAQUS的齿轮传动静力学分析,文献[7]在运用ABAQUS模仿齿轮转动的情况下对其不同位置进行静力学分析。综上所述,目前关于渐开线蜗杆副三维实体建模的方法主要是基于蜗杆副的齿面方程或者加工原理,然后通过SolidWorks、CATIA以及UG等三维建模软件进行实体模型的建立和二次开发,其缺点是建模过程复杂,专业知识要求较高;另一方面,目前关于通过有限元法对EPS用蜗杆副传动效率研究的论文较少,因此,本文以某EPS蜗杆副为研究对象,利用软件KISSsoft,直接输入蜗杆副参数完成其三维实体模型的建立,然后基于ABAQUS软件对其进行有限元接触分析和强度校核,并计算了不同齿面摩擦系数下蜗杆副的传动效率,为蜗杆副优化设计提供理论参考,具有一定的工程意义。
1 蜗杆副三维实体模型的建立
在KISSsoft的蜗轮蜗杆模块将蜗杆副参数按要求填入,其界面和对应基本参数如图1所示。
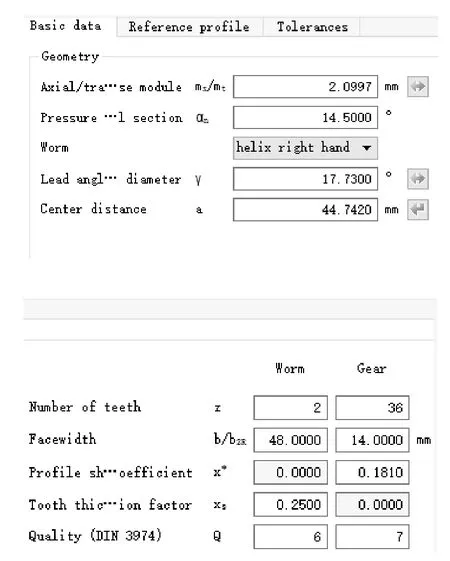
图1 蜗杆副基本参数输入界面
自动生成的三维实体模型如图2所示。将模型导入SolidWorks装配模块中进行干涉和间隙的检查,模型无干涉,蜗杆副啮合部位的最大间隙值为0.04 mm,所以模型满足要求。

图2 蜗杆副三维实体模型
2 蜗杆副有限元分析
2.1 有限元网格模型的建立
为了兼顾有限元分析的准确度和计算效率,只留下蜗轮和蜗杆中啮合部分的齿进行网格划分。由于蜗杆副齿面比较复杂,所以选择四面体单元进行网格划分,单元大小为0.6 mm,建好的网格模型如图3所示,单元总数为218 732。
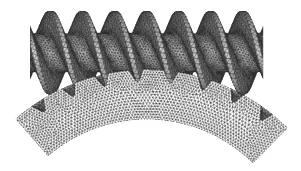
图3 蜗杆副网格模型
2.2 有限元分析的前期设置
为了让接触分析更易于收敛,在做接触分析时,设置了两个分析步;其中分析步1(step1)是为了让蜗轮和蜗杆接触上,分析步2(step2)模拟蜗杆副转动,并进行静力学分析。在对蜗杆副设置边界条件时,所施加位移和载荷约束是通过参考点施加的,本模型分别设置三个参考点RP1、RP2和RP3,其中RP1、RP2分别为蜗杆左右两端面中心,并各自与端面耦合,RP3为蜗轮分度圆中心,并与蜗轮耦合。Step1中设置RP3的“UR3(绕蜗轮轴转动)”为-0.002 rad,固定其它自由度;Step2中设置RP1的“UR1(绕蜗杆轴转动)”为3.14 rad,RP2放开“UR1”自由度,RP3 放开“UR3”自由度,固定其它自由度;除此之外,在Step2中,还得对RP3施加转矩载荷约束,即设置“CM3(绕蜗轮轴扭矩)”为-80 000 N.mm。蜗杆副材料特性按表1设置。

表1 蜗杆副性能参数
2.3 有限元分析结果
为了展示齿面应力随蜗杆副转动的变化规律,取转动过程中的三个位置进行研究,结果如图4—图6所示。
蜗轮材料的屈服强度为97 MPa,由图4—图6可知,蜗轮齿面啮合部位的最大Mises应力小于97 MPa,所以满足强度要求;还可以看出,在啮合部分,随着轮齿的啮入程度增加,齿面接触印迹往齿根方向下移,且较大应力值主要集中在蜗轮的一侧。
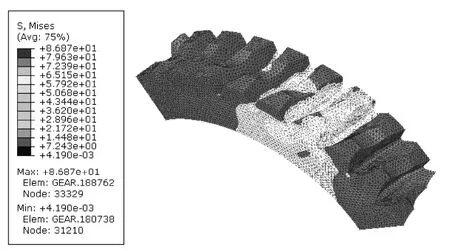
图4 蜗轮位置1
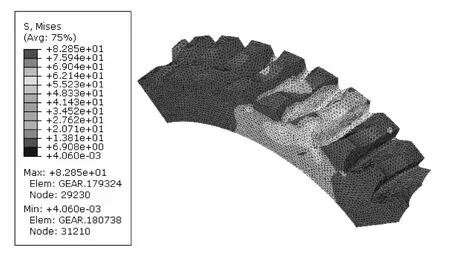
图5 蜗轮位置2
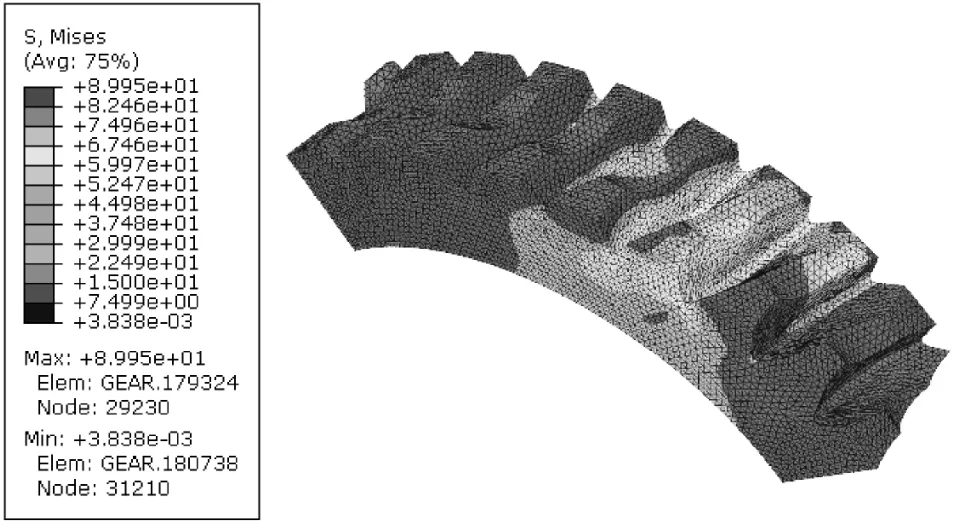
图6 蜗轮位置3
图7—图9分别对应三个位置蜗杆的Mises应力分布云图,由于蜗杆材料的屈服强度为785 MPa,所以从图中可以看出,蜗杆啮合时的Mises应力(未超过400 MPa)满足强度要求,并且可以看出,蜗杆齿面上的较大应力值主要分布在齿根处。
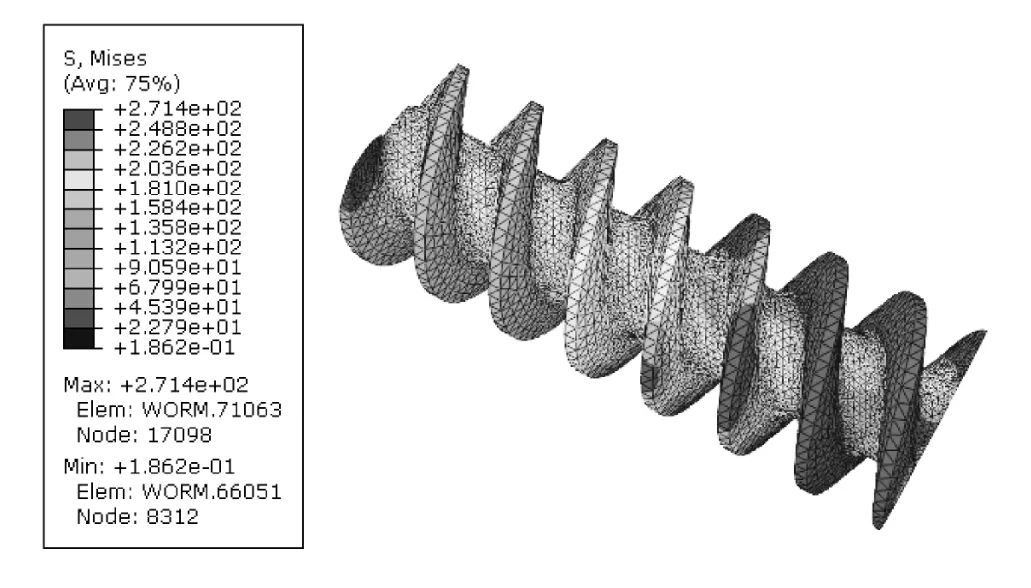
图7 蜗杆位置1
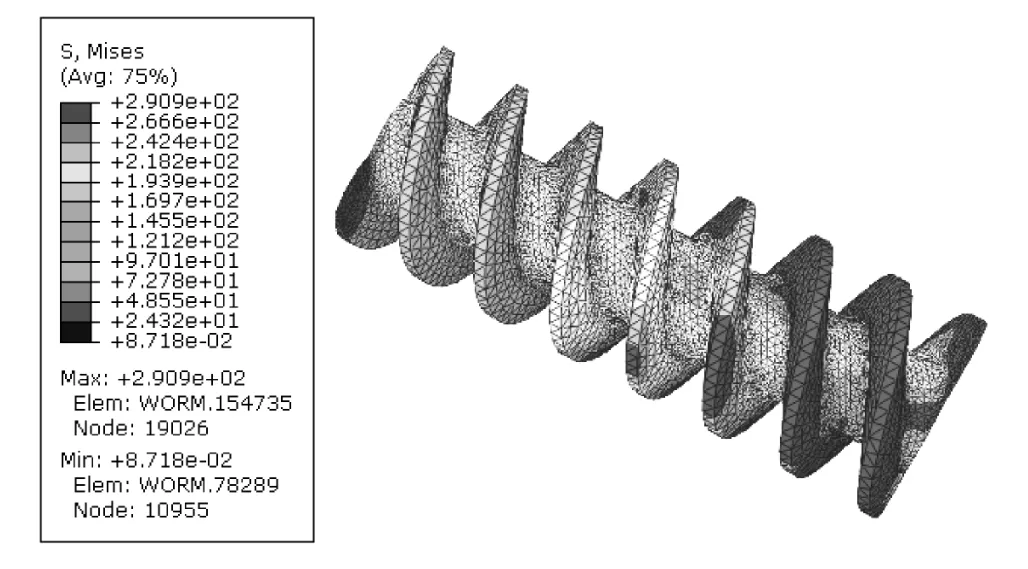
图9 蜗杆位置3
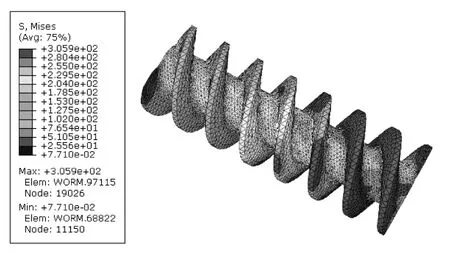
图8 蜗杆位置2
利用2.2节中设置的与蜗杆左端面耦合的参考点RP1理论上所受的支反力矩和实际所受支反力矩′的比值可以计算蜗杆副的传动效率,计算式为
式中,′可以在ABAQUS的“OBD field output”中通过读取参考点RP1的输出变量“RM(支反力矩)”获得,而可以由施加给蜗轮的转矩除以蜗杆副传动比求出。改变蜗杆副齿面的摩擦系数,得到不同摩擦系数下的传动效率如表2所示。

表2 不同摩擦系数下的蜗杆副传动效率
由表2数据可以看出,随着摩擦系数的增加,传动效率逐渐下降,并且下降幅度较大。所以,为了提高蜗杆副的传动效率,需使摩擦系数保持在较小值。
3 结论
本文通过KISSsoft软件对EPS蜗杆副进行实体建模,并利用ABAQUS软件对其进行了静力学接触分析,其主要研究内容和结论如下:
(1)利用KISSsoft软件对EPS蜗杆副进行三维实体建模,并通过有限元仿真分析验证了其啮合符合实际情况,满足强度要求,模型可用于有限元分析。
(2)通过ABAQUS软件模拟了蜗杆副的转动,对EPS用渐开线蜗杆副进行有限元接触分析,研究了转动过程中蜗杆副啮合齿面的接触应力分布规律,为优化蜗杆副性能提供了理论参考。
(3)在利用ABAQUS进行有限元接触分析的基础上,计算并分析了蜗杆副传动效率随啮合齿面摩擦系数的变化规律。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
高教学刊(2022年13期)2022-05-24
中国应急管理科学(2022年2期)2022-05-23
汽车实用技术(2022年5期)2022-04-02
课程教育研究(2021年10期)2021-04-13
中学生数理化·八年级物理人教版(2020年3期)2020-10-29
中国建筑金属结构(2018年12期)2018-12-22
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
农业与技术(2017年5期)2017-04-11
