
自适应4点同心手爪机构研究设计
2014-12-23 06:44尚延伟
机械工程师 2014年12期
尚延伟
(连云港杰瑞自动化有限公司,江苏 连云港222006)
0 引言
在机械加工行业中,工件的抓取和搬运通常采用气缸驱动的4点式手爪,其抓取力度可调,可抓取工件的尺寸范围大,而且对空间要求小,不会与机床产生干涉,方便手爪出入机床。但传统的4点式手爪中的4个接触点很难保证4点同心,对零部件加工和装配精度要求极高,而自适应4点同心手爪增加了一个旋转关节,在旋转关节上的2个接触点可以自动适应工件的形状,手爪4点圆心的位置则由另外2个固定接触点确定。
1 自适应4点同心手爪的结构组成
如图1所示,自适应4点同心手爪由手爪臂、旋转关节、接触轮等组成。手爪臂上有2个限位点,可以限制旋转关节在给定的范围内活动。
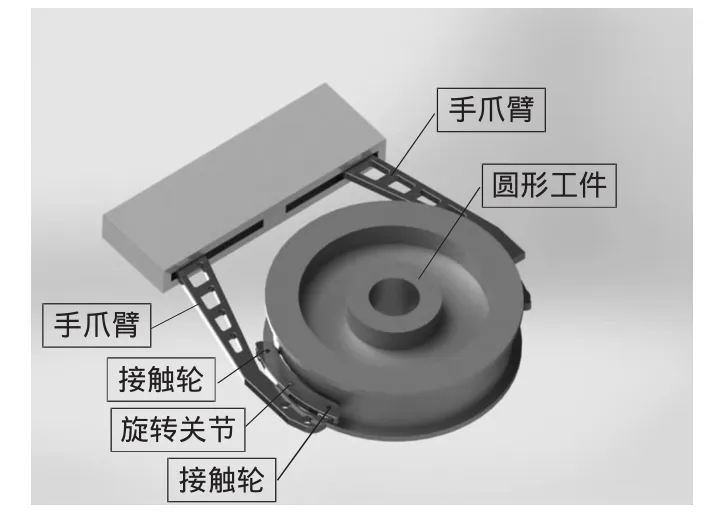
图1 自适应4点同心手爪结构组成
2 工作原理
在手爪抓取工件过程中,旋转关节上的一个接触点先与工件接触,在进一步夹紧的过程中,旋转关节会自动沿工件外形旋转,进而调整旋转关节上的另外一个接触点的位置,使4个接触点同心,保证手爪上的4个接触点与工件完全接触。
3 工件接触点处受力分析
分析工件在不同类型手爪、不同状态下4个接触点处的径向力和切向力,并作对比分析,计算其偏离率。
3.1 工件在理想情况下的受力分析
理想情况下接触点O处的径向力Fr0和切向力Fτ0计算公式:

式中:F0=F/2,sinα=L/(2R),F为手爪夹紧力。
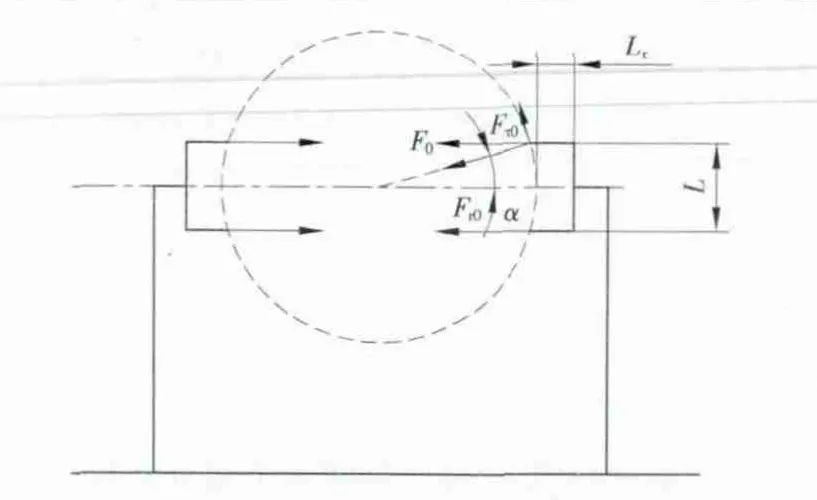
图2 理想情况下工件受力
理想情况下4个接触点和工件完全接触,工件在4个接触点处的受力相同。
3.2 传统4点固定式手爪实际受力分析
传统4点固定式手爪在实际使用过程中,由于零部件加工及装配精度,肯定存在偏差,其数值为ΔL,理论上有3点接触,但实际上由于手爪臂和工件受力变形,最终会有4个点接触,但4个接触点受力极不均匀,影响手爪抓取的位置精度及工件表面质量。
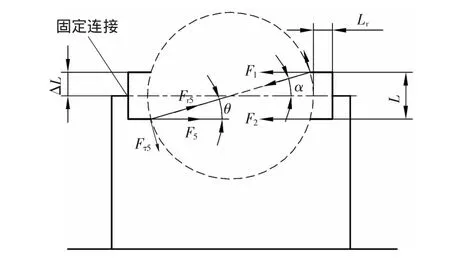
图3 传统4点固定式手爪工件受力
接触点处径向力Fr5和切向力Fτ5:
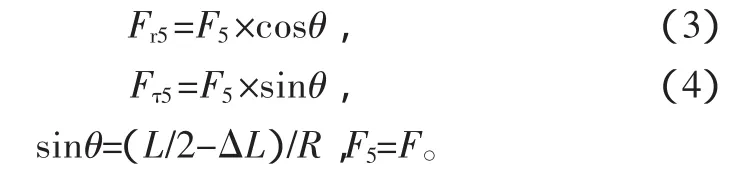
式中,ΔL为手爪旋转关节偏移量,R为工件半径,L为旋转关节上2接触点距离。
3.3 自适应4点同心手爪实际受力分析
当旋转中心点偏离ΔL时,图4中几何关系如下:

式中,Lr为旋转关节节点到工件外圆的距离,α为接触点偏移角。
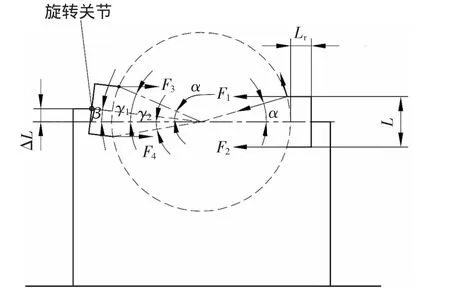
图4 自适应4点同心手爪几何关系
接触点3、4处水平方向受力F3、F4计算公式:

接触点3处的径向力Fr3和切向力Fτ3计算公式:

接触点4处的径向力Fr4和切向力Fτ4计算公式:

3.4 工件接触点处受力偏离率计算
受力偏离率是指接触点处的实际受力偏离理想情况的比率。为了保证工件表面加工质量,4个接触点处的受力要均匀,偏离率应控制在合理范围内。
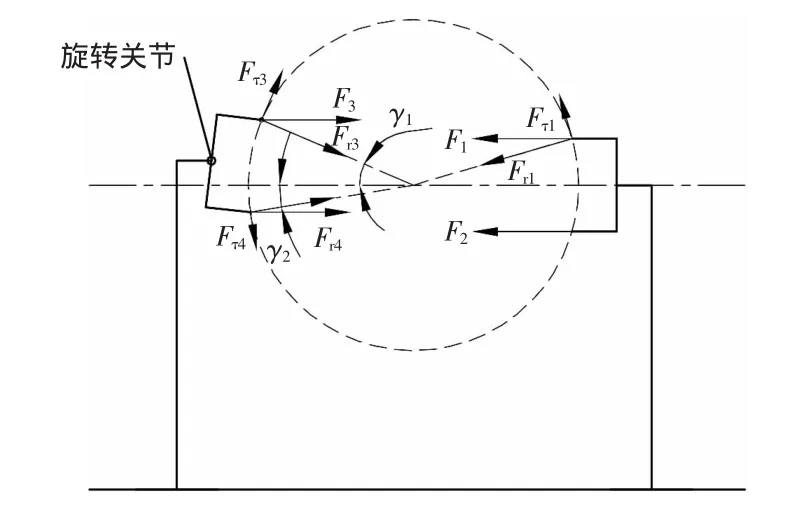
图5 自适应4点同心手爪工件受力
径向力偏离率计算公式为

切向力偏离率计算公式为

式中,Fτ为实际切向力,Fr为实际径向力,Fτ0为理想情况下的切向力,Fr0为理想情况下的径向力。
3.5 实际案例下的受力计算
实际案例下取 Lr=16 mm,L=200 mm,R=250 mm,ΔL=2 mm。
1)理想情况下工件接触点处径向力和切向力大小。
代入式(1)、式(2)经计算得:F0=;Fr0=F0×cosα=。
2)传统4点固定式手爪工件接触点处径向力和切向力大小。
代入式(3)、式(4) 经计算得:F5=F;Fr5=F5×cosθ=。
3)传统4点固定式手爪工件接触点处径向力和切向力偏离率。
代入式(9)、式(10),ΔFr5=×100%=100.8%;
×100%=96%。
4)自适应4点同心手爪工件接触点处径向力和切向力计算。
接触点3处的径向力和切向力大小:
代入式 (5)、式 (6),F3=F4=F/2,Fr3===0.203F。
接触点3处的径向力和切向力偏离率:
代入式(9)、式(10),ΔFr3=(Fr3-Fr0)/Fr0=-0.274%;Fτ3=(Fτ3-Fτ0)/Fτ0=1.5%。
接触点4处的径向力和切向力大小:
代入式(7)、式(8),Fr4=F×cos(α-β)/2=F×cos23.147°÷2=0.460F;Fτ4=F×sin(α-β)/2=F×sin23.147°÷2=0.197F。
接触点4处的径向力和切向力偏离率:
ΔFr4=(Fr4-Fr0)/Fr0=0.38%;ΔFτ4=(Fτ4-Fτ0)/Fτ0=-1.5%。
经过上述计算可知,当旋转中心点偏离2 mm时,传统4点固定式手爪接触点处工件径向力最大偏离率为100.8%,切向力最大偏离率为96%,而自适应4点同心手爪3、4点处径向力偏离率分别为-0.274%和0.38%,切向力偏离率分别为1.5%和-1.5%。由此可见自适应4点同心手爪4个接触点处的受力更加均匀。
4 实际应用
轮毂机加工厂自动化生产线上利用机器人进行机床上下料,与之配套使用的自适应4点同心手爪可以实现工件精准取放,减小了调试难度,并且提高了产品良品率。
自适应4点同心手爪同样可以抓取方型及不规则形状工件,可以广泛应用于上下料、装配、搬运、机加工、清洗等环境。
5 结语
本文对传统的4点固定式手爪结构进行了优化设计,提出了自适应4点同心手爪结构,降低了手爪零部件的加工和装配精度,而且可以提高手爪抓取的位置精度,并分析了4个接触点处的受力情况,经计算验证,其受力情况明显好于传统的4点固定式手爪,可以最大程度地减少手爪对工件表面质量的影响。
[1] 舒幼生.力学[M].北京:北京大学出版社,2005.
[2] 吴拓.现代机床夹具典型结构图册[M].北京:化学工业出版社,2011.
[3] 王建国.机械加工工艺[M].北京:电子工业出版社,2012.
[4] 濮良贵,纪名刚.机械设计[M].8版.北京:高等教育出版社,2006.
猜你喜欢
防爆电机(2022年4期)2022-08-17
福利中国(2022年3期)2022-07-20
音乐天地(音乐创作版)(2021年7期)2021-10-13
河北画报(2020年3期)2020-06-24
河北画报(2020年5期)2020-06-10
中国眼镜科技杂志(2019年9期)2019-11-11
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
荣誉杂志(2017年7期)2017-08-23
城市道桥与防洪(2014年5期)2014-02-27
