
飞机方向舵故障建模与侧风着陆仿真
2016-12-21 02:24:13雒东超袁东刘超王文星
飞行力学 2016年6期
雒东超, 袁东, 刘超, 王文星
(中航工业飞行仿真航空科技重点实验室, 陕西 西安 710089)
飞机方向舵故障建模与侧风着陆仿真
雒东超, 袁东, 刘超, 王文星
(中航工业飞行仿真航空科技重点实验室, 陕西 西安 710089)
基于风洞试验数据和CFD数据,建立了某型飞机上、下两片方向舵在松浮、卡滞和脱落等故障的数学模型;针对方向舵脱落故障,在飞行模拟器上进行了人在环的侧风着陆仿真试验,验证了模型的准确性,得到了与实际侧风响应相吻合的故障模型;最后,基于此模型探讨了方向舵故障下的侧风着陆安全性与驾驶员负荷。
故障建模; 侧风着陆; 仿真; 驾驶员负荷
0 引言
在众多飞行事故中,由操纵面的结构性故障引起的事故占很大比例[1]。1983年5月1日,以色列一架F-15战斗机在适应性训练中右侧机翼折断,飞行员通过加大油门增加飞行速度的方法成功保持飞机以平稳速度降落。由此可见,研究飞机操纵面故障甚至脱落情况的飞机动力学建模和响应计算分析方法并掌握其处置措施是非常必要的。
在进行飞行动力学建模时,需要大量的气动数据,常常依赖于风洞试验数据,此方法成本较高。而进行故障建模需要的气动数据较少,若单独为此进行风洞试验得不偿失。造成这种局面的主要原因是故障种类繁多,理论分析困难,试验成本又相当高昂,所以很难得到具有较高逼真度的故障数学模型[2-3]。目前,几乎所有的故障模拟应用研究人员都是在已有故障数学模型的基础上或自己建立简化模型开展应用研究,这种研究的难度相对较小[1]。同样,本文采用CFD方法获得了必要的气动数据,在已有的飞行动力学模型上建立了较为精确的方向舵故障模型。通过对不同种类、不同程度故障下的飞机特性的分析[4-5],建立了某型飞机方向舵松浮、卡滞、脱落故障的动力学模型,并进行了侧风着陆仿真试验,验证了模型的准确性,在此基础上探讨了方向舵脱落状态下的侧风着陆安全性及驾驶员负荷。
1 方向舵故障分类与建模
本文主要研究了某型飞机上、下两片方向舵分别松浮、卡滞和脱落等9种故障。
方向舵脱落的飞机,其质量特性模型、飞行控制系统模型和起落架模型等均与原机差异不大,故均可采用原机相应的模型,而由于方向舵的缺失,横航向气动力损失较大,且航向操纵效能丧失,所以要重新建立故障飞机的空气动力学模型(见图1)。
气动力系数基本为飞机运动参数、飞行状态的线性函数[5]:
Ci=Ci0(α,β,Ma)+CiCS(α,β,Ma)+
CiM(Ma)+CiGE+CiCF+CiES
(1)
式中:Ci0(α,β,Ma)为全机气动系数基本项;CiCS(α,β,Ma)为操纵面偏转所引起的气动系数;CiM(Ma)为飞机运动引起的气动系数;CiGE为地效引起的气动系数;CiCF为构型变化所引起的气动系数;CiES为外挂物引起的气动系数。
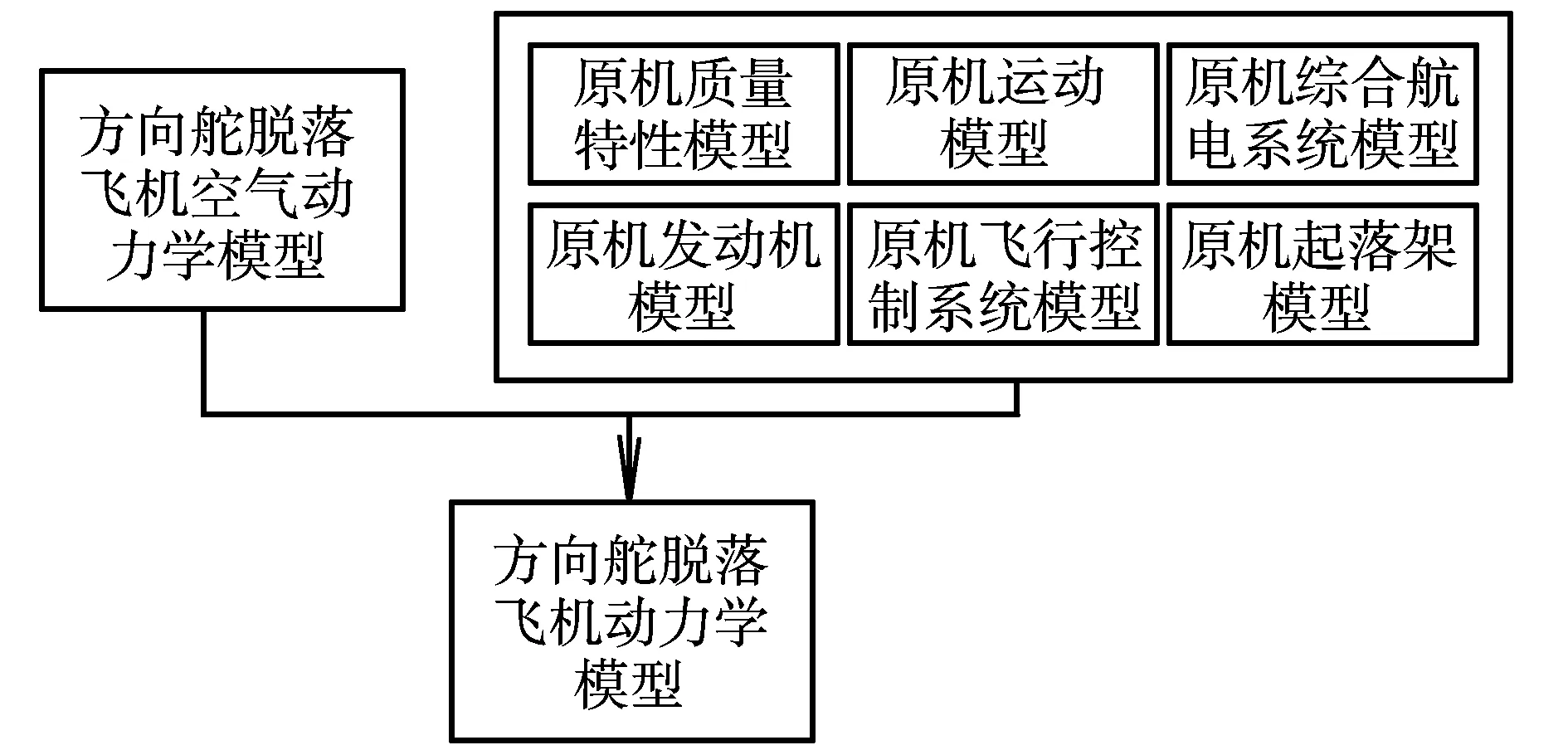
图1 方向舵故障飞机动力学模型建模思路Fig.1 Flight dynamics modeling methods of aircraft with the rudder fallen off
在整个飞行包线范围内,气动力和力矩通常采用非线性系数形式。系数包括升力系数、阻力系数和侧力系数,以及俯仰力矩系数、滚转力矩系数和偏航力矩系数。气动系数一般是飞行状态、迎角、侧滑角、操纵面偏转角的函数[1,5]。当某型飞机方向舵发生脱落故障时,气动系数基本项会产生一个增量ΔCi0(H,α,β,Ma),并且方向舵偏转引起的气动系数增量为零;当某型飞机的方向舵发生卡滞故障时,方向舵偏转引起的气动系数为一常值;当某型飞机方向舵发生松浮故障时,发生故障的方向舵偏转角近似为侧滑角[4]。气动系数的数学模型如下:
Ci=Ci0(α,β,Ma)+k1ΔCi0(H,α,β,Ma)+
k2Cir(α,δr)+CiGE+CiLG+CiOC
(2)
式中:k1为气动系数基本项影响因子;k2为方向舵偏转引起的气动系数的影响因子;δr为方向舵偏度;CiOC为除方向舵外其他操纵面偏转引起的气动系数。
2 气动数据的获取
2.1 静力系数
本文建立气动力模型所需的气动数据,大部分已通过风洞试验获得。方向舵脱落所引起的气动系数基本项增量,需通过CFD方法计算得到。将原机和方向舵脱落飞机的三维模型分别带入到CFD求解器中,计算得出气动力之差就是方向舵脱落前后的气动力损失。
利用ANSYS ICEM CFD网格划分软件,生成非结构网格,在机身表面进行加密处理。
求解方程为守恒形式的N-S方程:
(3)
式中:U,F,G,H和J均为列向量。有:
采用有限体积法离散控制方程,其空间离散网格采用四面体网格。定义来流为可压缩的理想气体,湍流模型采用k-ω模型。
(4)
飞机表面采用固壁无滑边界,来流马赫数和方向、静压根据飞机使用状态来确定,流场边界设置为压力远场。
2.2 方向舵脱落对偏航阻尼的影响
假设气流以正侧滑流过垂尾(βvt>0),同时受翼身融合体涡系的影响,将产生侧偏,用侧洗角σ表示,且当侧洗速度沿Oy轴正向时,σ为正值。垂尾处的侧滑角为:
βvt=(1-∂σ/∂β)β
(5)
作用在垂尾上的偏航力矩系数可以表示为:
(6)
式中:Avt=Svtlvt/(Sb)为垂尾静面矩系数。对β求导:
(7)
(8)
故偏航阻尼与垂尾的面积成正比,安定面占垂尾面积的百分比为λr≈0.773,即方向舵脱落飞机的偏航阻尼系数为原机的0.773倍。
3 人在环的侧风着陆仿真及驾驶员负荷分析
3.1 侧风着陆仿真
由于方向舵脱落,横向静稳定性降低,方向舵脱落后飞机在侧风下的响应要比原机剧烈[6]。在本文研究过程中,进行了多组人在环的侧风着陆试验,在不同侧风和操纵下,飞机响应大致相同[7-8]。
限于篇幅,本文选取某型飞机抗侧风极限30 kn作为研究对象,风向90°。在30 kn侧风下,由于风速较大,飞机航迹较难控制,因此在着陆过程中,通常使用侧滑-偏航结合法进行侧风着陆。为了方便比较和分析,原机在进行侧风着陆时同样采用侧滑-偏航结合法。由于风速较快,偏流角在10.6°以上。侧风响应曲线如图2~图4所示。
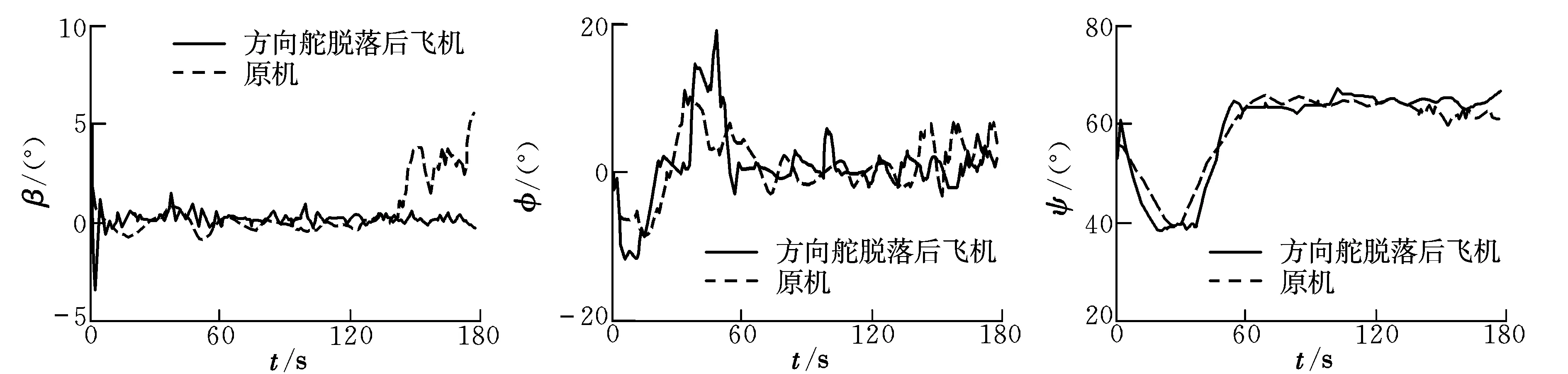
图2 横航向响应Fig.2 Lateral and directional responses
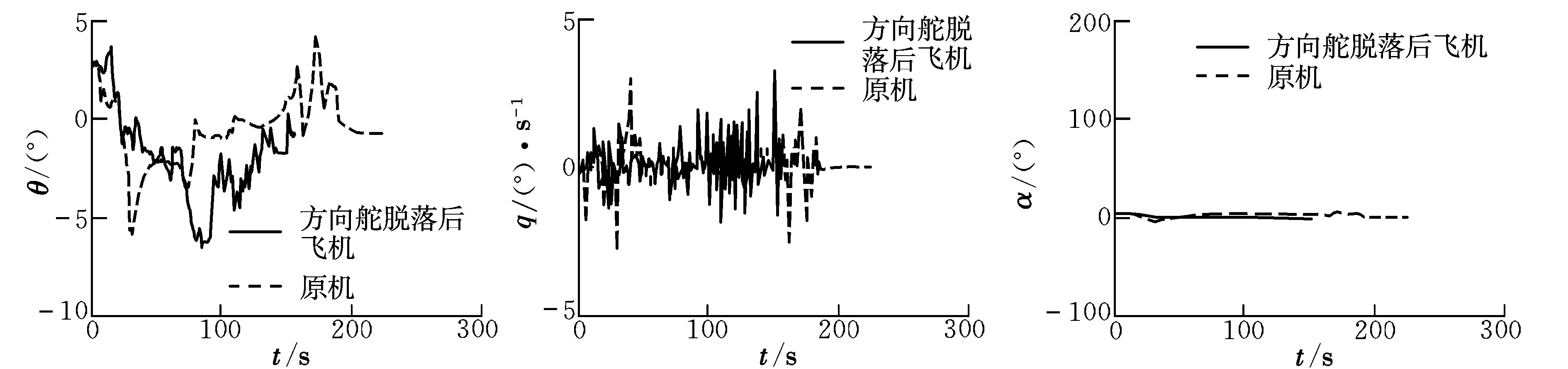
图3 纵向响应Fig.3 Longitudinal responses
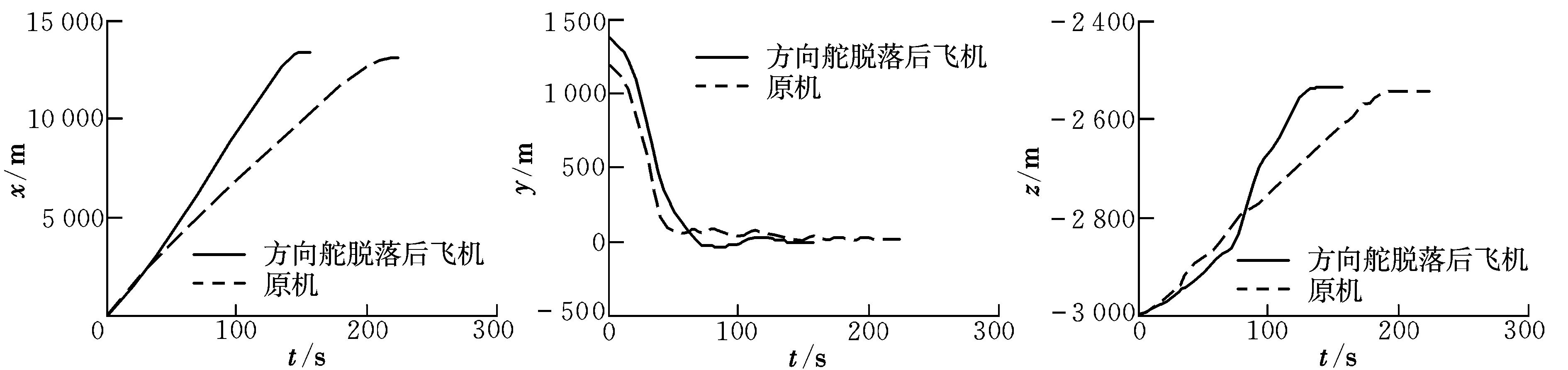
图4 下滑轨迹Fig.4 Gliding trajectories
3.2 驾驶员负荷分析
驾驶员的俯仰、滚转、偏航操纵功率谱密度如图5所示。由图可知,在30 kn侧风中,方向舵脱落后飞机未操纵脚蹬,而原机会采用脚蹬来修正航向,故原机负荷较大。俯仰操纵频率维持在0~0.2 Hz,操纵次数明显增多;滚转操纵的频率较原机增大,方向舵脱落后飞机的操纵速率加快,并且小幅滚转操作较多。
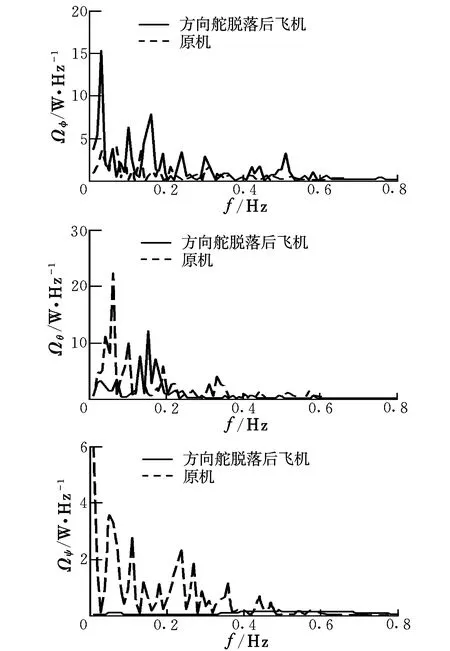
图5 驾驶员俯仰、滚转、偏航操纵功率谱密度Fig.5 Power spectral density of pilot’s longitudinal,lateral and directional control
4 结束语
本文以某型飞机为研究对象,建立了某型飞机方向舵卡滞、松浮及脱落故障的动力学模型,并在飞行模拟器上进行了速度30 kn、侧风90°下的着陆仿真试验,验证了该数学模型的准确性,并在此基础上研究了驾驶员的操纵负荷。
发生方向舵脱落故障的飞机侧风着陆驾驶方法总结如下:当飞机进入五边并开始下滑,先采用航向、法向、侧风来向压坡度转弯,使空速方向和机头方向同时改变。航向角的改变量要与偏流角一致,使飞机航迹保持预定方向;然后回盘回舵,使飞机不带侧滑和坡度,保持飞机航迹对准预定下降点下降。在着陆前的瞬间,如果操纵杆过量,会使飞机同时带有小量滚转,所以要协调杆和油门以控制飞机以平稳姿态下滑。
[1] Nguyen N,Krishnakumar K,Kaneshige J,et al.Dynamics and adaptive control for stability recovery of damaged asymmetric aircraft[R].AIAA-2006-6049,2006.
[2] Sun J,Joshi S.An indirect adaptive control scheme in the presence of actuator/sensor failures[R].AIAA-2009-5740,2009.
[3] Ahmed-Zaid F,Ioannou P A,Gousman K,et al.Accommodation of failures in the flight control system of the F-16 aircraft using adaptive control[J].IEEE Control Systems,1991,11(1):73-78.
[4] 张平,陈宗基.飞机操纵面故障研究及其补偿重构[J].飞行力学,1997,15(3):67-72.
[5] 袁东.先进战斗机地面飞行模拟器的建模与仿真[D].西安: 西北工业大学,2005.
[6] 周自全,张子彦.飞行品质与飞行安全[J].飞行力学,2009,27(2):1-6.
[7] 张立彬,苏胜昔.关于飞机侧风着陆问题的分析[J].飞行力学,2002,20(4):51-55.
[8] 杨一栋.飞机抗侧风着陆系统[J].航空学报,1988,9(7):393-397.
(编辑:方春玲)
Modeling of aircraft rudder faults and simulation of landing in crosswind
LUO Dong-chao, YUAN Dong, LIU Chao, WANG Wen-xing
(AVIC Aeronautical Science and Technology Key Laboratory of Flight Simulation, Xi’an 710089, China)
Based on the data of wind tunnel experiments and CFD, the model of some aircraft’s rudder faults is built, such as loosing, jamming and falling off of each rudder. By conducting pilot-in-loop simulation tests with the rudder falling off using a high-level flight simulator, this paper verifies the accuracy of the model. The fault models matching the crosswind response are also given. In the end, this paper discusses the safety of landing and pilot load in the crosswind with the rudder failed.
modeling of faults; landing in crosswind; simulation; pilot load
2016-03-15;
2016-08-11;
时间:2016-09-22 14:55
雒东超(1990-),男,辽宁朝阳人,硕士,研究方向为飞行动力学建模与飞行控制。
V212.1
A
1002-0853(2016)06-0082-04
猜你喜欢
装备环境工程(2022年7期)2022-08-10 10:22:50
内燃机与动力装置(2022年1期)2022-03-21 13:51:14
科学与财富(2021年35期)2021-05-10 22:24:50
民用飞机设计与研究(2021年1期)2021-04-06 13:09:54
装备制造技术(2020年3期)2020-12-25 05:22:12
机械设计与制造工程(2020年8期)2020-09-03 08:15:54
光明中医(2019年9期)2019-03-19 14:30:35
北京航空航天大学学报(2017年9期)2017-12-18 07:12:28
新疆农垦科技(2016年10期)2016-06-15 20:29:33
化工学报(2015年12期)2015-06-19 07:53:22
