
民用飞机方向舵往复偏转仿真研究
2020-09-03 08:15:54阮文斌
机械设计与制造工程 2020年8期
阮文斌
(上海飞机设计研究院,上海 201210)
偏航机动是由方向舵快速大幅偏转引起的侧向机动,机动过程中方向舵、垂尾上产生较大气动载荷并传递到后机身。偏航机动是民用飞机载荷设计中非常重要的一种机动情况,是垂尾、后机身等部件的载荷严重情况之一。现行的偏航机动适航条款(包括CCAR25.351[1]、FAR25.351[2]和CS25.351[3])要求考核方向舵操纵器件(通常指脚蹬)突然移动至最大可用方向舵偏度,直到静平衡侧滑角时再操纵方向舵操纵器件突然回到中立位置的过程。整个过程驾驶员是单向蹬舵,不用考虑驾驶员来回往复蹬舵情况。
2001年11月12日美国东部时间9:16,一架A300B4-605R飞机(航班AA587)从纽约肯尼迪国际机场起飞不久后坠毁,事故调查表明[4]:为了纠正进入尾部紊流导致的飞机滚转,飞行员执行了5次近乎全行程的方向舵操纵(即4次反向输入),结果垂尾上产生了很大的气动载荷,导致垂尾安定面连接接头损坏,使垂尾从空中脱落。第五次方向舵输入后的载荷超过了飞机极限载荷承载能力,而这个承载能力却通过了当时适用的适航标准审查。方向舵的这种反向输入是规章允许的(注:或者说规章中没有条款不允许这种操作),对于大型运输机设计而言,一般认为这种操作是非常规的,但还有另外两起事件中驾驶员也执行了类似的方向舵往复操纵,以此纠正受到的扰动。
根据上述的事故调查及调研结果,航空规章制定咨询委员会(aviation rulemaking advisory committee,ARAC)重建了飞行操纵协调工作组(flight controls harmonization working group,FCHWG)以协助完成方向舵往复偏转条款的制定,同时欧洲航空安全局(European aviation safety agency,EASA)也参与了此项任务。根据FCHWG调查结果形成了方向舵脚蹬灵敏度/方向舵偏转问题建议报告[5],报告中FCHWG建议采用一个新条款(25.353)和一个相应的咨询通告,大多数FCHWG成员认为条款的变更是需要的,但是他们在具体要求上没有达成一致。推荐的新条款25.353是一个新的偏航机动条件(区别于现行25.351定义的偏航机动条件),这个条款增加了一个设计极限载荷要求,其由一个单次往复条件或由一个两次往复条件组成。
国内民机偏航机动一直以25.351条款为设计依据,对于FCHWG建议的新条款25.353——方向舵往复偏转的研究和分析很少。本文将以新条款25.353——方向舵往复偏转(两次往复条件)为基础进行仿真计算分析,并与现行的偏航机动条款25.351仿真计算结果进行对比。
1 适航条款的要求及理解
1.1 偏航机动
偏航机动情况是CCAR-25部[1]、FAR-25部[2]和CS-25部[3]25.351条款规定的一种侧向机动情况,计算的飞机响应过程包含了以下1)~4)规定的操作:
1)当飞机以零偏航角非加速飞行时,假定方向舵操纵器件突然移动使方向舵偏转到受下列条件限制的偏转量:
①操纵面止动器;
②驾驶员作用力的限制值,从VMC(最小可操作速度)到VA(设计机动速度)为1 330 N,从VC/MC(设计巡航速度)到VD/MD(设计俯冲速度)为890 N,在VA与VC/MC之间按线性变化。
2)当方向舵操纵器件偏转,以始终保持在1)中规定的限制值内可用的最大方向舵偏转时,假定飞机偏航到过漂侧滑角。
3)当飞机偏航到静平衡侧滑角时,假定方向舵操纵器件保持,以获得在1)中规定的限制值内最大可用方向舵偏转。
4)当飞机偏航到3)的静平衡侧滑角时,假定方向舵操纵器件突然回到中立位置。
偏航机动过程方向舵操纵器件操纵示意图如图1所示。
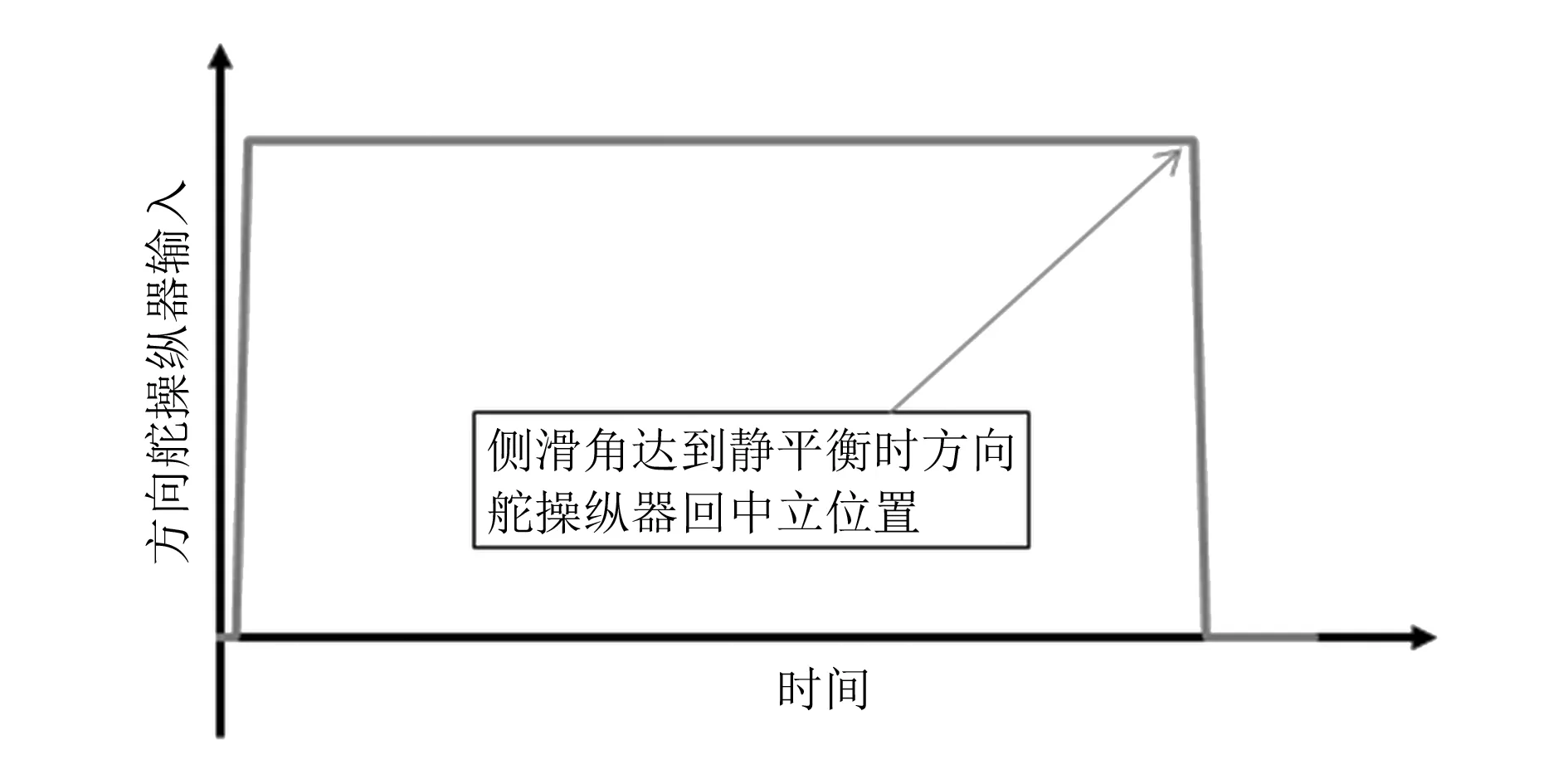
图1 偏航机动方向舵操纵器件操纵示意图
1.2 方向舵往复偏转
根据偏航机动条款25.351要求,偏航机动整个过程中驾驶员是单向蹬舵,没有考虑驾驶员来回往复蹬舵情况。而实际飞行中如果没有明确的飞行限制,驾驶员是可以来回往复蹬舵的,这就可能使垂尾上的实际载荷超过偏航机动要求的设计载荷,进而导致事故。因此,为保证飞机安全性,FCHWG建议采用一个新的条款25.353——方向舵往复偏转(两次往复条件)[5],以作为25.351条偏航机动的补充。
新条款25.353规定方向舵往复偏转两次时飞机必须按照以下1)~5)条要求的方向舵往复偏转载荷情况进行设计。
1)当飞机以零偏航角非加速飞行时,假定方向舵操纵器件突然移动使方向舵偏转到受下列条件限制的偏转量。
①操纵面止动器;
②驾驶员作用力的限制值,从VMC到VA为1 330 N,从VC/MC到VD/MD为890 N,在VA与VC/MC之间按线性变化。
2)当飞机偏航到最大过漂侧滑角时马上采取方向舵脚蹬满偏反向操作。
3)在反向偏转后,一旦飞机偏航到反向最大过漂侧滑角时马上采取方向舵脚蹬满偏反向操作。
4)当飞机偏航到随后的最大过漂侧滑角时马上采取方向舵脚蹬满偏反向操作。
5)在反向偏转之后,一旦飞机偏航到反向过漂侧滑角,驾驶舱方向舵脚蹬突然回到中立位置。
根据上述要求,方向舵往复偏转两次过程中方向舵操纵器件操纵示意图如图2所示。
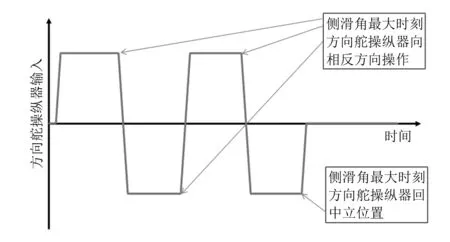
图2 方向舵往复偏转两次方向舵操纵器件操纵示意图
此外,新条款规定方向舵往复偏转产生的载荷情况应视为极限载荷,无须采用额外的安全系数。即使如此,任何由于这些极限载荷造成的永久性损伤也不能阻碍飞机的持续安全飞行和着陆。速度范围由零度侧滑角时可能到达方向舵最大偏度的最高空速或VMC之中取大者,至VC/MC。考虑计算工况时,只需考虑起落架和减速板(或扰流板作为减速板)处于收起状态;若因航路情况使用了副翼(或襟副翼及其他任何作为副翼的气动力装置)和缝翼,还需考虑副翼和缝翼放下的构型。
2 飞机运动方程
偏航机动是中国民用航空规章第25部(CCAR-25)条款25.351规定的重要设计情况。机动中因飞机产生侧滑,造成飞机不对称受载,方向舵偏转和侧滑导致垂尾承受很大载荷,该情况是垂尾、后机身的主要受载情况。
按规范定义考虑偏航机动时,飞机响应可用侧滑及偏航二自由度方程描述[6]。方程初值为:t=0时,β=α=0。
(1)
式中:β为侧滑角;t为时间;g为重力加速度;q为速压;S为机翼面积;W为全机质量;V∞为无穷远处来流速度;CCβ为全机侧力系数对侧滑角的导数;CCTOβ为无尾飞机侧力系数对侧滑角的导数;α为偏航角速度;Lv为垂尾对重心的尾力臂;CCδr为全机侧力系数对方向舵偏度的导数;δr为方向舵偏度;b为机翼展长;Iz为偏航转动惯量;Cnβ为全机偏航力矩系数对侧滑角的导数,也称航向静稳定导数;Cnα为全机偏航力矩系数对偏航角速度的导数,也称偏航阻尼导数;Cnδr为全机偏航力矩系数对方向舵偏度的导数,也称方向舵操纵效能;M为全机重心处纵向坐标;M0为气动力力矩参考点纵向坐标。
CCAR-25部条款25.351规定了在计算垂尾载荷时可以假定偏航角速度为零,最大方向舵偏角的大小及(δr-t)操纵规律如图1所示。偏航机动新条款——方向舵往复偏转规定了另外一种(δr-t)操纵规律(如图2所示)。按照两种不同的(δr-t)操纵规律,由方程(1)分别求出整个过程的β响应和α响应,从而分别获得两种条款下的垂尾侧向总载荷Fv:
Fvβ=(CCβ-CCTOβ)βqS
(2)
Fvδr=CCδrδrqS
(3)
(4)
Fv=Fvβ+Fvδr+Fvα
(5)
式中:Fvβ为侧滑角贡献的垂尾侧向载荷;Fvδr为方向舵偏度贡献的垂尾侧向载荷;Fvα为阻尼贡献的垂尾侧向载荷。
3 机动仿真计算
本文通过建立运动动力学方程,采用机动仿真的方法,以第1章适航条款规定的2种方向舵操纵规律为基础对某电传民用飞机进行机动仿真计算。
在近二三十年,主动控制技术越来越多地应用在民用航空领域,尤其是大型运输机上,主流客机如空客A320、A380,波音B777、B787都广泛应用了先进的主动控制技术。飞机主动控制技术和控制律的引入对于飞行载荷而言,主要是会影响飞机的操纵,进而影响飞机的机动动作和载荷情况,因此本文对考虑控制律后偏航机动与方向舵往复偏转进行了机动仿真计算,并对比分析了飞机的响应及垂尾载荷。具体结果如图3~图5所示。

图3 方向舵操纵器件(脚蹬)位移对比

图4 侧滑角响应对比

图5 垂尾侧向载荷对比
从对比结果可以看出,考虑方向舵往复偏转后,飞机机动幅度越来越大,侧滑角大幅增加,从而导致垂尾侧向载荷大幅增加,这种大幅增加在飞机设计过程中往往是不能接受的。因此,需要进一步通过载荷一体化设计优化控制律,对方向舵往复偏转引起的垂尾载荷增加做进一步限制。
4 结论
本文首先对偏航机动新条款25.353——方向舵往复偏转的要求进行理解并以该条款为基础进行仿真计算分析,得到如下结论:
1)为保证飞机的安全,有必要考虑偏航机动新条款25.353——方向舵往复偏转。
2)考虑方向舵往复偏转后,飞机机动幅度越来越大,侧滑角大幅增加,从而导致垂尾侧向载荷大幅增加,可通过控制律优化来降低垂尾载荷。
猜你喜欢
航空世界(2023年3期)2023-05-01 19:57:24
装备环境工程(2022年7期)2022-08-10 10:22:50
民用飞机设计与研究(2021年1期)2021-04-06 13:09:54
装备制造技术(2020年3期)2020-12-25 05:21:52
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
北京航空航天大学学报(2017年9期)2017-12-18 07:12:28
民用飞机设计与研究(2015年3期)2015-12-07 12:09:28
军民两用技术与产品(2015年1期)2015-11-12 09:27:46
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
