
基于差分进化算法的开关磁阻电机转矩脉动抑制
2016-11-08 04:45朱龙吕晓波徐东杰孙文兵
电气传动 2016年10期
朱龙,吕晓波,徐东杰,孙文兵
(中国矿业大学信息与电气工程学院,江苏 徐州 221008)
基于差分进化算法的开关磁阻电机转矩脉动抑制
朱龙,吕晓波,徐东杰,孙文兵
(中国矿业大学信息与电气工程学院,江苏 徐州 221008)
针对开关磁阻电机(switched reluctance motors,SRM)转矩脉动大的问题,提出一种基于差分进化算法的开关磁阻电机转矩控制方法。利用差分进化算法的优秀寻优能力,将其应用到转矩分配函数开关角在线寻优过程中,直接将转矩脉动作为优化目标来确定最佳开关角。以1台12/8极开关磁阻电机为研究对象,构建了以DSP为控制核心的转矩控制系统实验平台,实验结果证明了基于差分进化算法的控制方法能有效抑制开关磁阻电机转矩脉动。
开关磁阻电机;差分进化;转矩分配函数;转矩脉动
SRM具有结构简单、运行可靠、制造成本低、效率高等一系列优点。与传统的交流电动机不同,SRM采用双凸极结构,电机转矩脉动较大,尤其在转动惯量小、转速低的应用中较为严重。为解决转矩脉动问题,文献[1]利用RBF优秀的非线性映射逼近能力以及泛化能力来对离线仿真挑选出来的最佳控制参数进行建模从而构建基于RBF的转矩脉动控制器;文献[2]提出了一种电流最优在线神经网络的训练方法;文献[3-5]提出了基于迭代学习的开关磁阻电机在线转矩优化控制方法,该方法需要电机的精确模型,利用迭代学习的记忆和修正机制,并将每个位置处的最佳控制参数记录到内存中,从而完成转矩脉动控制。但这些方法在实际SRM控制系统中难以实现,且对调速范围较宽的SRM鲁棒性不好。本文采用差分进化算法对开关磁阻电动机的开关角进行调节,自动产生使转矩脉动最小的开关角,可显著减小转矩脉动。
1 差分进化算法
差分进化算法是一种迭代寻优算法,其基本思想为:使用随机分布方法产生初始种群,然后经过遗传、变异、交叉后产生中间种群,最后将中间种群的个体与各自的父代个体进行比较,若中间个体优于父代个体,则将中间个体视为子代个体,否则子代个体完全复制父代个体。与传统的优化算法比较,差分算法的搜索是从一群潜在最优解开始搜索,具有内在的并行特性;差分算法中种群的遗传、变异、交叉操作与目标函数无关,因此无须要求目标函数可导;差分进化算法中个体的进化基于随机、概率的原则,相对简单,用于SRM的转矩控制具有独特优势。
差分进化算法的主要内容有:个体适应度函数、差分进化算子、算法参数设置。其中个体适应度函数对个体进行评价,引导进化的方向。算法参数设置影响算法的收敛速度、解的精确度等性能。
1.1 适用度函数
研究对象的状态为

式中:D为研究对象的状态维数,也就是差分算法中个体的维数。
研究对象的属性中被优化的属性为

式中:P为待优化的属性个数。
研究对象的属性中被约束的属性为

式中:C为被约束的属性个数。
对优化的属性进行一定的处理,使对象的属性寻优以及约束限制转化为数学上的求最小值问题,记为

式(4)可以将对属性的约束转化为优化问题。即可以将带约束的最优化问题转化为1个目标函数的求最小值问题:

式中:wm为属性m的权值因子,用来调节属性m在优化问题中的重要性,wm越大表示属性m的重要性越强,反之则越弱。
1.2 差分进化算子
差分进化算法的算子主要包括变异、交叉、选择。变异算子的主要作用是模仿自然界中遗传和变异操作。其变异操作可以表示为

式中:NP为种群规模;F为控制变异的变异因子;Vi,G+1为由父代产生子代的中间代,用于接下来的交叉操作和选择操作;Xr1,G,Xr2,G,Xr3,G为第G代种群中随机选择的3个个体。Xr2,G,Xr3,G用来产生 Xr1,G的进化向量。为了提高种群的多样性,i,r1,r2,r3互不相等。
交叉算子的作用在于进一步提高种群的多样性。交叉算子的作用对象为当前种群Xi,G和中间代种群Xi,G+1,根据随机概率规则交叉新旧个体的部分元素,交叉操作为

式中:CR为控制交叉的交叉因子;randb(j)为[0,1]之间的均匀分布;mbr为1到D之间的随机数,mbr确保个体u中至少有一维分量来自变异个体V。
选择算子主要是用适应度函数完成对2个个体的优劣对比,从而指导进化的进行。当Ui,G+1的适应度优于 Xi,G时,则将Ui,G+1赋予 Xi,G,否则保留原个体,将Xi,G赋予Xi,G+1。由此完成个体的优胜劣汰,从而使种群向着最优进化。
1.3 算法参数设置
差分进化算法的可调参数包括:种群规模NP;变异因子F;交叉因子CR;最大迭代代数G。
种群规模NP即种群中个体数量由计算复杂度和探索能力决定,种群规模越大,种群多样性越强,越利于全局寻优。但是计算资源消耗随种群规模的增长呈指数增长,因此种群规模不宜设置过大,一般根据个体的维数设置为10~20D之间。
变异因子和交叉因子可以影响种群的多样性,进而影响算法的收敛速度和收敛成功率。变异因子F一般取0~2之间,交叉因子在0~1之间取。
2 差分进化算法的TSF开关角寻优
2.1 线性转矩分配函数

图1 线性转矩分配函数波形Fig.1 The function waveform of linear torque distribution
图1为开关磁阻电机线性转矩分配函数(torque sharing function,TSF)波形图,其输出转矩指令在相邻两相的重叠区域随着转角的变化而线性变化,第k相(当前相)的转矩指令线性下降,第k+1相(将来相)的转矩指令线性增加,第k相与第k+1相的转矩之和等于给定转矩。线性转矩分配函数的解析表达式为
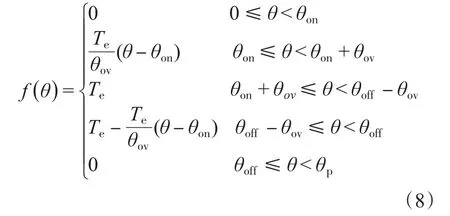
式中:θon为开通角;θov为换相重叠角;θoff为关断角;θp为换相周期。
由式(8)可知,转矩分配函数的调节参数为开通角θon,关断角θoff,重叠角θov,合理调节以上参数可以获取不同的TSF曲线,从而获得最佳的转矩脉动优化效果。
2.2 开关角寻优方法
表1为差分进化算法种群信息表,其定义可以方便编程计算,将种群的信息用1个NP×3的矩阵来描述,每个个体占用矩阵的1行。差分进化算法的中间种群由对上一代种群的完全变异杂交产生,下一代个体与上一代个体之间无直接联系,因此算法中只能追踪种群的最佳适应度,而无法追踪个体的适应度。

表1 差分进化算法种群信息表Tab.1 The population information table of differential evolution algorithm
图2为基于差分进化算法的在线开关角寻优算法框图。

图2 基于差分进化算法的在线开关角寻优Fig.2 Online switch angle optimization based on differential evolution algorithm
最佳开关角寻优的算法流程如下:
1)设定算法参数。个体维数为2;种群规模为20;最大迭代代数为100;变异因子为0.85;交叉因子为1;解空间θon∈[0,15];θoff∈[7.5,22.5],约束条件θoff-θon>0。
2)初始化种群。计算初始种群的适应度。
3)使用变异算子对种群进行变异操作来移动搜索轨迹。使用交叉算子对变异后的种群进行交叉操作,从而扩大种群的多样性,提高搜索轨迹的分布范围,产生中间种群。
4)计算中间种群的适应度。即每个个体中不同开关角信息下TSF函数的转矩脉动。
5)采用简单的“精英选择”选择策略进行优胜劣汰。即保留转矩脉动较小的优胜个体不变进入下一代,更新种群信息。
6)算法收敛或者到达最大迭代代数,则终止寻优;否则,转到3)。
图3为基于差分进化算法种群适应度在线计算框图。其换相重叠区捕捉器用于捕捉下一个区间起点,并发出控制信号给差分进化算法模块和转矩脉动模块。TSF开关角的重载信号为load_flag的上升沿,换相控制模块根据当前开关角信息产生3个相导通信号,供给电机换相控制以及换相重叠区捕捉器模块使用。换相重叠区捕捉器根据当前开关角信息以及相导通信号产生换相重叠区信号。在换相重叠区信号的上升沿触发转矩脉动计算器模块对累积的转矩信息进行转矩脉动计算操作,保存计算结果并复位其计算器寄存器。在相重叠区信号上升沿时刻同时触发差分进化计算的选择操作、变异操作和交叉操作,用以产生1个下一代中间种群个体。

图3 差分进化算法种群适应度在线计算框图Fig.3 The block diagram of population fitness online computation by differential evolutionary algorithm
图4为电机运行时,换相重叠区捕捉器以及TSF开关角重载时刻捕捉器的捕捉示意图。由转矩分配函数的波形可以得出,在区间7°~15°之间不涉及到换相操作,因此将开关角信息重载捕捉器的捕捉时刻设在该区间,即每相的10°转子位置处。

图4 区间起点及重载位置示意图Fig.4 Sketch map of interval starting point and overloading position
根据差分进化算法的收敛性可知,随着迭代的进行,种群将会收敛到一个最佳适应度状态,从而获取最优开关角,完成寻优操作。
3 实验结果及其分析
以18.5 kW,12/8极开关磁阻电机实验平台为基础,对转矩脉动在线优化算法进行了实验验证。控制器给定直流母线电压为650 V,电流斩波控制器的采样频率为15.626 kHz,斩波的滞环宽度为1 A。系统过流保护阈值设为90 A,过压保护阈值为850 V,超速保护阈值为1 200 r/min。
给定转速约为500 r/min,开通角为1°,关断角为20°,采用差分进化算法的转矩控制时的输出结果如图5所示。从图5可以看出转矩脉动得到了明显的抑制,转矩脉动约为±9%。图6为采用传统线性TSF的转矩脉动输出,转矩脉动约为±30%。图7为基于差分进化算法的转矩控制器在转速突变状态下的波形。由图7可以看出,输出转矩在转速上升过程中保持限幅值60 N·m不变,经过0.7 s达到稳定状态。
实验结果表明,基于差分进化算法的转矩控制系统能有效抑制其输出转矩脉动。

图5 基于差分进化算法的转矩控制系统实验波形Fig.5 The experimental waveforms of torque control system based on differential evolution algorithm

图6 传统线性TSF的转矩控制系统实验波形Fig.6 The experimental waveforms of traditional linear TSF torque control system

图7 基于差分进化算法的加速动态波形Fig.7 The accelerated dynamic waveforms based on differential evolution algorithm
4 结论
针对SRM转矩脉动大的特点,设计了种群适应度在线计算方法,并将差分进化算法应用到了开关磁阻电机转矩分配函数最佳开关角的在线寻优过程中,能够在不同工况下寻找到匹配的最佳开关角,从而明显地减小SRM的转矩脉动。实验结果表明,该控制策略能有效抑制开关磁阻电机的转矩脉动,控制精度高、适用性强,具有较高的实用价值。
[1]夏长亮,陈自然,李斌.基于RBF神经网络的开关磁阻电机瞬时转矩控制[J].中国电机工程学报,2006,26(19):127-132.
[2]张云,徐衍亮,孔辉,等.电流最优的多变量静态神经网络开关磁阻电机控制[J].电工技术学报,2013,28(8):250-258.
[3]潘再平,罗星宝.基于迭代学习控制的开关磁阻电机转矩脉动抑制[J].电工技术学报,2010,25(7):51-55.
[4]SAH00 S K,PANDA S K,XU J X.Iterative Learning-based High-performance Current Controller for Switched Reluctance Motors[J].IEEE Transactions on Energy Conversion,2004,19(3):491-498.
[5]GOBBI R,RAMAR K,SAH00 N C.Fuzzy Iterative Technique for Torque Ripple Minimization in Switched Reluctance Motors[J].Electric Power Components and Systems,2009,37(9):982-1004.
Torque Ripple Suppression of Switched Reluctance Motor Based on Differential Evolution Algorithm
ZHU Long,LÜ Xiaobo,XU Dongjie,SUN Wenbing
(School of Information and Electrical Engineering,China University of Mining and Technology,Xuzhou 221008,Jiangsu,China)
For the problem of the large torque ripple of switched reluctance motor,a torque control method of switched reluctance motor based on differential evolution algorithm was proposed.Using differential evolution algorithm to optimize the search ability,it was applied to the torque distribution function switch angle on-line optimization process.The torque pulse action was directly as the optimal target to determine the optimal switching angle.Taking a 12/8 poles switched reluctance motor as the research object,torque control system experiment platform with DSP as the core control was constructed.The experimental results show that the control method based on differential evolution algorithm can effectively inhibit the torque ripple of switched reluctance motor.
switch reluctance motor;differential evolution algorithm;torque sharing function;torque ripple
TM352
B
10.19457/j.1001-2095.20161004
2015-07-19
修改稿日期:2016-03-09
朱龙(1990-),男,硕士研究生,Email:931852575@qq.com
猜你喜欢
大电机技术(2022年5期)2022-11-17
计算机仿真(2022年8期)2022-09-28
中国特种设备安全(2022年3期)2022-07-08
防爆电机(2021年4期)2021-07-28
电子制作(2018年19期)2018-11-14
郑州大学学报(工学版)(2018年2期)2018-04-13
中国塑料(2016年11期)2016-04-16
电测与仪表(2016年1期)2016-04-12
舰船科学技术(2015年8期)2015-02-27
地震研究(2014年1期)2014-02-27
