
火电厂风机系统低电压穿越解决方案
2016-11-08 04:45姚新阳黄学良王正齐顾文蒋琛唐一铭
电气传动 2016年10期
姚新阳,黄学良,王正齐,顾文,蒋琛,唐一铭
(1.东南大学电气工程学院,江苏 南京 210096;2.江苏方天电力技术有限公司,江苏 南京 211102)
火电厂风机系统低电压穿越解决方案
姚新阳1,黄学良1,王正齐1,顾文2,蒋琛2,唐一铭2
(1.东南大学电气工程学院,江苏 南京 210096;2.江苏方天电力技术有限公司,江苏 南京 211102)
针对火电厂风机系统无速度传感器V/f控制的高压变频器,提出了一种按失电时间分别测量定子剩磁电压或将定子电流矢量分解的转速估算方法,从而实现转速跟踪再启动。对该方法进行了全系统的Matlab仿真和分析。研究表明,该方法能在1~2 s内准确跟踪风机转速,并迅速使转速恢复正常,实现系统低电压穿越,防止因变频器低电压保护造成火电机组停机、甚至大范围停电等事故。
风机系统;高压变频器;无速度传感器;转速跟踪再启动;低电压穿越
火电厂一类辅机中,风机系统的工作状态直接影响到锅炉系统的工作状态,如送风机全停、风量小于25%等条件会引发机组MFT动作及机组RB[1],待风机转速降到零以后勘察事故原因,再人工重启。整个过程中机组其他设备都要相应停机,汽轮机停止发电,耗时极长,损失巨大。近年来,风机系统进行了大量的变频改造,但大多数火电机组的辅机高压变频器不具备低电压穿越能力[2],当输入电压降至额定值的65%以下时,便会自动停止输出,退出运行[3]。为减小损失,在发生暂态性电压降落时,要提高变频器—辅机系统的低电压穿越能力,尽量保持风机转速与输出平稳。因此,解决火电厂风机系统低电压穿越问题迫在眉睫。
若要从根本上解决该问题,必须要在失电源期间为高压变频器提供能量支撑。例如在高低高型高压变频器直流母线上增加储能。但目前大多数高压变频器都采用级联结构,并无统一的直流母线,同时,风机的功率大多为兆瓦级,所需要的蓄电池容量极大,成本非常高。
风机系统中,电机转子及所带叶片的转动惯量很大,从旋转状态到静止状态的自由停车时间可达几十min甚至几h[4]。而电压暂态性故障时间只持续几s。如果在电压恢复时,能重新启动旋转状态的风机,使风机的运行状态和火电机组的出力迅速恢复到正常状态,避免大范围停机,实现低电压穿越。因此,转速跟踪再启动,即飞车启动应运而生。
目前,转速跟踪再启动包括如下几种方法。
1)在电机轴上安装测速装置,如轴编码器[5]等。当系统恢复供电时,控制系统以编码器中的速度值为起始点进行重新启动。但额外的硬件设备增加了系统的成本,也降低了系统的可靠性。
2)检测定子反电动势(即剩磁电压)的频率。但由于转子电流衰减得很快,该方法对检测时间要求很高。
3)变频器直流侧最小电流法。给电机定子一定的搜索电压,直流侧的电流最小时,定子的同步转速就接近转子转速。但由于通用高压变频器的直流环节没有电流传感器,此方法在实际工况中难以实现[6]。
4)V/f曲线电压比较法。西门子变频器手册[7]提到该方法,即保持定子端的输入电流为恒定的额定电流,将变频器输出电压与V/f曲线上的电压计算值做比较。但实际上,V/f曲线与定子电流的物理关系并不明确[8]。
本文提出了一种基于失电时间的转速跟踪再启动方法,将检测剩磁电压和测量转矩电流相结合,以失电时间与去磁时间的关系作为检测不同电气量的判断标准。该方法无需增加额外的硬件装置,可以跟踪到风机的任意转速,可靠性高,而且设置简单。
1 基于失电时间的转速跟踪再启动方法
1.1 计算去磁时间
异步电机正常运行时,转子中存在低频电流。失电后由于转子电阻的存在,转子电流逐渐衰减,定子感应电压随之衰减,从断电到剩磁电压衰减到接近于零(根据测量设备的精度,可设置为1%UN)的这段时间称为去磁时间tqc。去磁时间主要与运行频率和电机功率有关,运行频率越高去磁时间越短,电机功率越大去磁时间越长。去磁时间为

其中,系数k可以通过实验测量数据拟合得出。
1.2 检测剩磁电压
失电时间小于tqc时,采用检测定子剩磁电压的跟踪方法。当定子失电时,转子电流不会立即减小到零,在衰减的过程中,转子由于惯性继续旋转,从而产生和转子转速相同的旋转并衰减的气隙磁场。转速与磁通的乘积得到感应电动势,此时异步电动机工作在发电状态,定子侧将会感应出包含转子转速信息的感应电动势,测量定子电压的频率f即可推算出转子转速n,即

1.3 测量定子转矩电流
失电时间大于tqc时,采用基于转矩电流的跟踪方法。tqc时间段外,定子电压和电流均接近于零,因此需要外加激励产生可测的且含有转速信息的电气量,从而判断转子转速的大小。本文采用在定子侧施加测试电压,以定子电压矢量定向,测量定子电流的转矩分量,直至转矩分量接近于零,此时,测试电压频率对应的同步转速即为转子转速。
为防止电动机处于发电状态,使变频器电容电压泵升过压,故搜索过程从高于电机转子频率起,考虑所有可能性取最高50 Hz,故搜索频率从50 Hz向0 Hz变化。同时,搜索电压产生的转矩不能大幅度改变电机原有的工作状态,也不能使定子电流过大,因此电压幅值约为10%UN,实际运用时可根据电机转动惯量大小做相应调整。
按转子磁链定向的mt坐标系中的电磁转矩表达式为

因此,当转子磁链Ψr恒定时,可认为电磁转矩与定子电流转矩分量it成正比,it反映出电磁转矩的大小和方向。
但按转子磁链定向的方法分解定子电流时,要测量转子磁链的相位角φ。但重启动时,转子磁链的初始相角并不确定,也无法测量,因此,重启动时计算定子电流转矩分量并不能直接以转子磁链定向。本文采用以定子电压矢量定向的方法,即令t轴与定子电压矢量重合,近似求得转矩电流。
感应电机数学模型中,由于定子阻抗较小,相对于定子感应电势可以忽略,即同时,定子漏抗也很小,可近似认为定子磁链即为气隙磁链。感应电机的矢量图可以简化为图1所示,其中和定子电压矢量同向,将产生有功功率,可近似认为是定子电流的转矩分量。

图1 感应电机近似矢量图Fig.1 Approximate vector diagram of induction motor

图2 风机定子电流矢量分解示意图Fig.2 Diagram of fan stator current vector decomposition
由图2可得:

开始输入测试电压的时刻设为t0,高压变频器接收的参数为电压幅值U和频率 f,t0时刻初始相角为θ0,则
计算出转矩电流it后,便可根据其大小和正负判断是否跟踪到转子转速。理论上,如果测试电压频率对应的同步速恰好与转子转速相同,则异步电机转差率为零,不产生电磁转矩,即转矩电流为零。
但实际上,由于采用的是定子电压矢量定向,忽略了定子阻抗压降和定子漏抗的作用,并且转矩电流的测量中存在滤波环节造成的延时,现场中也有测量误差和外界干扰,因此,当转矩电流接近于零时即可认为跟踪到转子转速。可设定一个转矩电流阈值I0,当转矩电流下降到阈值时,即可认为转速跟踪成功。
1.4 逐级升压再启动
再启动阶段:设当转矩电流达到阈值时,测试电压的频率为 fc,幅值为10%UN。该幅值只能使电机产生可测的转矩电流,提供转速信息,不能改变电机的运动状态。因此,要使电机能够尽快恢复到原有工作状态,需要提升压频比。但若将压频比瞬时恢复至额定值,会出现定子过电流的情况。本文方法中令压频比逐级上升。设Δf为目标频率 fN与重启动初始频率 fc之差,则频率增加(0~10%)Δf,(10%~20%)Δf,(20%~30%)Δf期间,压频比分别为正常值的50%,80%,90%,之后恢复正常的压频比,并升压至目标值。
因此,转速跟踪再启动的实现流程如图3所示。

图3 转速跟踪再启动方法流程图Fig.3 Flow chart of flying restart
2 仿真与分析
2.1 主电路仿真
针对本文提出的方法,进行了Matlab的仿真验证。主电路由三相交流电源、高压变频器、三相断路器和风机负载组成,控制电路根据不同的工作阶段分别仿真。
单元级联型多电平高压变频器是高压变频器中广泛应用的一种拓扑结构,具有控制简单、可靠性高、谐波小的优点[9]。本仿真中的6 kV高压变频器采用该拓扑,同时采用以{-24°,-12°,0°,12°,24°}为移相角构成的多重移相变压器,减少了对电网侧的谐波污染[10],整体结构如图4所示。

图4 级联型高压变频器结构图Fig.4 Structure diagram of the cascaded multicell high-voltage inverter
5级功率单元采用多重移相SPWM调制,每相需5路形状完全相同但相角依次相差Ts/5(Ts为三角载波周期)的三角载波和2路幅值相同、相位相反的正弦调制波。正弦调制波由2个参数控制:调制比m和正弦波频率f。则Ut=m,Um=0,通过Park逆变换和Clarke逆变换得到调制波[uAuBuC]T。
输入不同m和f即可给电机输入变频电源,输出波形如图5所示。由于多电平输出,电压波形非常接近正弦波,并且电压越大,正弦度越高。

图5 高压变频器输出电压波形Fig.5 Output voltage waveforms of high voltage frequency converter
三相断路器用于在电源电压下降到65%UN以下时,断开高压变频器与负载的连接。
风机负载采用鼠笼式异步电动机。额定功率2 900 kW,额定电压6 kV,定子电阻0.063 1 Ω,定子电感5.964 8 mH,转子电阻3.684 9 Ω,转子电感5.964 8 mH,励磁电感0.258 16 H,转动惯量300 kg·m2,2对极。风机类负载转矩和转速的平方成正比,因此本仿真中设TL=4.5×10-3×n2。
2.2 转速跟踪再启动控制系统仿真与分析
2.2.1 检测剩磁电压的仿真与分析
当失电时间小于tqc时,采用检测定子剩磁电压的跟踪方法。控制电路对定子剩磁电压进行过零检测,将正弦波转换为方波,测量方波上升沿和下降沿的时间差,便可求得方波的频率,再根据式(1)推算出电机转子转速。仿真电路图如图6所示。

图6 检测剩磁电压仿真电路图Fig.6 Simulation circuit diagram of detecting the remanence voltage
转子转速、剩磁电压和用于测频率的方波波形如图7所示,随着转子转速自由下降,剩磁电压的幅值和频率均相应减小。

图7 风机转速、定子剩磁电压及对应方波波形图Fig.7 Waveforms of fan speed,stator remanence voltage and corresponding square wave
取不同的时刻,计算转子转速,并与仿真测得的实际转速相比较,结果如表1所示。可以看出,检测剩磁电压测转子转速的精度较高,误差很小。

表1 剩磁电压法下搜索转速与实际转速对比Tab.1 Search speed compared with the actual speed under the remanence voltage method
2.2.2 测量转矩电流的仿真与分析
当失电时间大于tqc时,采用测量转矩电流的跟踪方法。本仿真中,1~2 s变频器由于电网电压下降,闭锁输出,电机转速自由下降,在此期间剩磁电压衰减完毕。2~4 s变频器输出幅值为10%UN,频率由50 Hz向0 Hz变化的测试电压,测量电机转矩电流,直至转矩电流小于阈值6 A(约为空载电流的10%),此时,搜索到转子转速。仿真电路图如图8所示。
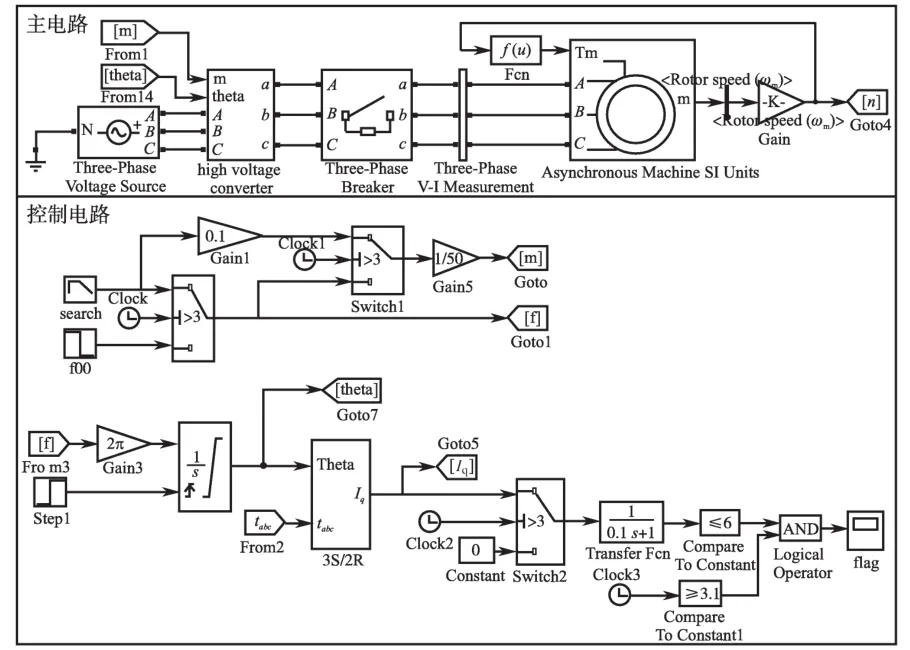
图8 测量转矩电流仿真电路图Fig.8 Simulation circuit diagram of detecting the torque current
输出结果如图9所示,从图中可以清晰看出,当测试电压对应的空载转速逐渐接近转子转速时,定子转矩电流也逐渐接近阈值。

图9 变化的测试电压下定子转矩电流变化情况图Fig.9 Change trend of stator torque current under the metabolic test voltage
当电机失电转速不同时,搜索到的转速与实际转速的误差大小也不同。在搜索速度均为25 Hz/s时,对比情况如表2所示。

表2 不同失电转速下搜索转速与实际转速对比Tab.2 Search speed compared with the actual speed under different losing electricity speed
从表2中可得,该方法能有效捕捉转子转速,失电转速为中高转速时,误差较小,但在失电转速较低时,受定子电阻影响较大,误差较大。因此速度搜索必须考虑下限频率,当搜索频率低于下限频率可认为电机处于静止,终止速度搜索,将启动模式转为常规模式。
同时,由于检测和滤波环节的延迟及电压电流谐波的存在,转矩电流阈值的设置将在很大程度上影响测量误差的大小。经仿真,阈值设置在约空载电流的10%时,误差可接受。实际运行时,要根据现场实验来设置合适的转矩电流阈值。
当搜索电压频率变化的速度不同时,搜索到的转速与实际转速的误差大小也不同。在失电转速均为1 073 r/min时,对比情况如表3所示。可明显看出,搜索速度越慢,搜索精度越高,但搜索到转子转速的时间就越长。实际使用过程中,要结合生产要求,综合选择搜索速度。
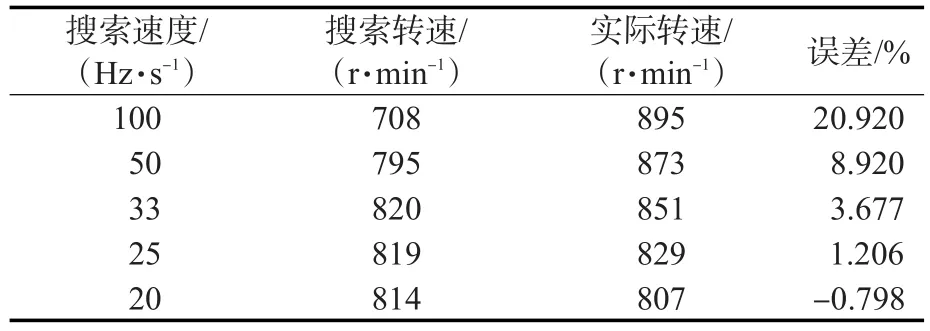
表3 不同搜索速度下搜索转速与实际转速对比Tab.3 Search speed compared with the actual speed under different search speed
转速搜索成功后进入再启动阶段,本仿真采用渐进压频比升压法,在搜索到转子转速后,压频比由搜索时的10%,逐步上升至50%,80%,90%进行磁化,最终到达额定压频比。该方法有效保证了启动电流不会出现过电流现象。全过程中风机转速及定子电压电流的波形如图10所示,可见该方法下,定子电流较为稳定。

图10 转速跟踪再启动方法下风机转速及定子电压电流的典型波形图Fig.10 The typical waveforms figure of fan speed,stator voltage and current using flying restart
2.2.3 转速跟踪再启动对风机输出的影响
风机的输出流量与其转速成正比,输出压力与其转速的平方成正比。输出流量与输出压力的变化趋势如图11所示。从断电到恢复原运行状态的整个过程中,输出流量和输出压力存在最小值,且该最小值和电机的转动惯量、断电时间有关。相同条件下,转动惯量越大,最小值越大;断电时间越长,最小值越小。
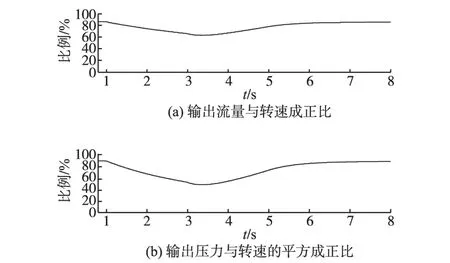
图11 风机输出流量与输出压力的变化趋势Fig.11 The tendency of the fan output flow and pressure
采用该功能后,要对机组调控方式做出一定的修改。不能完全以变频器或风机的启停信号作为FSSS的控制信号,而是加入风量等性能指标为考核参数,在合格范围内则不启动RB。同时,在停电和重启动时间段内,风机的工作状态不可调控,因此,火电机组的控制系统要将风机的输出量作为控制命令,协调机组其他设备的工作状态,稳定整个火电机组出力。
3 结论
本文针对火电厂风机系统无速度传感器V/f控制的高压变频器,提出了一种按失电时间分别测量定子剩磁电压或定子电流矢量分解的转速估算方法,并实现了转速跟踪再启动。仿真表明,该方法能有效搜索到转子转速,使风机再启动过程平滑稳定,实现低电压穿越,避免对锅炉等设备造成过大影响。在断电时间较短、转速变化较小的情况下,风机输出流量和输出压力甚至能基本保持不变,机组出力基本保持平稳。
[1]杨成民.300MW火电机组仿真运行[M].北京:中国电力出版社,2009.
[2]张彦凯,智勇,拜润卿,等.火电厂辅机变频器低电压穿越能力的研究[J].电气传动,2014,44(11):55-58.
[3]付淑波,张春晖,张志新.高压变频器掉电恢复自动重启功能的探讨[J].黑龙江电力,2009,31(4):299-300.
[4]宋瑞智,刘贺平,赵敏.高压变频器瞬时停电再启动方法的MATLAB仿真[J].电机与控制应用,2010,37(8):54-58.
[5]蒋世用,成凌飞,李金格.高压变频器瞬时失电再启动的新型实现方法[J].煤炭工程,2012(2):12-14.
[6]王宏英,龚世缨.电机重启动的控制策略[J].电气传动,2013,43(7):68-71.
[7]西门子(中国)有限公司.SIEMENS MicroMaster4 MM440操作手册使用大全[Z].2002:104-107.
[8]赵文才,金富宽,王傲能,等.一种异步电机再启动时转速估算方法[J].电气传动,2012,42(9):11-15.
[9]李柱炎.单元级联型多电平高压变频器的研究[D].武汉:华中科技大学,2012.
[10]陈琼.H桥级联型高压变频器的仿真与实验[D].长沙:湖南大学,2010.
Solution of Low Voltage Ride Through of Fan System in Thermal Power Plant
YA0 Xinyang1,HUANG Xueliang1,WANG Zhengqi1,GU Wen2,JIANG Chen2,TANG Yiming2
(1.School of Electrical Engineering,Southeast University,Nanjing 210096,Jiangsu,China;2.Jiangsu Frontier Electric Technology Co.,Ltd.,Nanjing 211102,Jiangsu,China)
In order to realize flying restart,a new speed estimation method based on stator residual magnetism voltage or the vector decomposition of stator current determined by power losing time was proposed,which aimed at high-voltage inverter using speed sensorless V/f control in thermal power plant fan system.Then,the whole system was simulated and analyzed by Matlab.Study shows that this method can track the fan speed precisely in 1~2 s and make the speed return to normal fast.Low voltage ride through is achieved and thermal power unit downtime or widespread power outages caused by the converter low voltage protection is prevented.
fan system;high-voltage frequency converter;speed sensorless;flying restart;low voltage ride through
TM921
A
10.19457/j.1001-2095.20161012
2015-09-10
修改稿日期:2016-03-10
江苏省电力公司科技项目(J2015007)
姚新阳(1991-),女,硕士在读,Email:yxy19911005@163.com
猜你喜欢
电源技术(2022年12期)2023-01-07
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年3期)2020-11-06
中国人民警察大学学报(2018年12期)2019-01-17
电子制作(2017年7期)2017-06-05
中国人民警察大学学报(2016年6期)2016-10-20
