
一种基于虚拟环流阻抗的改进型并联UPS控制方法
2016-11-08 04:45赵启良刘天强
电气传动 2016年10期
赵启良,刘天强
(许继电源有限公司,河南 许昌 461000)
一种基于虚拟环流阻抗的改进型并联UPS控制方法
赵启良,刘天强
(许继电源有限公司,河南 许昌 461000)
针对常规虚拟环流阻抗控制方法不能有效地抑制并联UPS低次谐波电压,致使并联系统不稳定的问题,进行了建模分析,并在虚拟环流阻抗控制策略基础上加入瞬时环流反馈控制。通过对并联UPS的环流阻抗计算,得出加入瞬时环流反馈控制的并联UPS可以有效抑制并联UPS低次谐波电压,减小环流。在2台2.5 kV·A的UPS上进行并联实验,验证了新型的并机控制方法是可行的,且效果良好。
并联;谐波抑制;环流
目前常用的并联UPS控制方式有主从控制、下垂控制和虚拟环流阻抗[1-2]控制。这3种控制方式都是以输出电压有效值和输出电流有效值为基础进行功率均分的PID控制。由于虚拟环流阻抗控制在理论上可以不需要并机电感,这极大地降低了并联UPS装置(系统)的成本,并且该控制方法具有良好的输出外特性,近年来得到了较大推广。
本文通过对传统虚拟环流阻抗控制的并联UPS装置的虚拟环流阻抗进行计算,并将瞬时环流反馈控制引入到并联UPS装置的控制中。采用瞬时环流控制直接调节输出参考电压幅值、相位达到控制并联UPS装置输出电压,提高并联系统的环流阻抗,抑制并联系统的低次谐波环流。
1 原理模型与设计
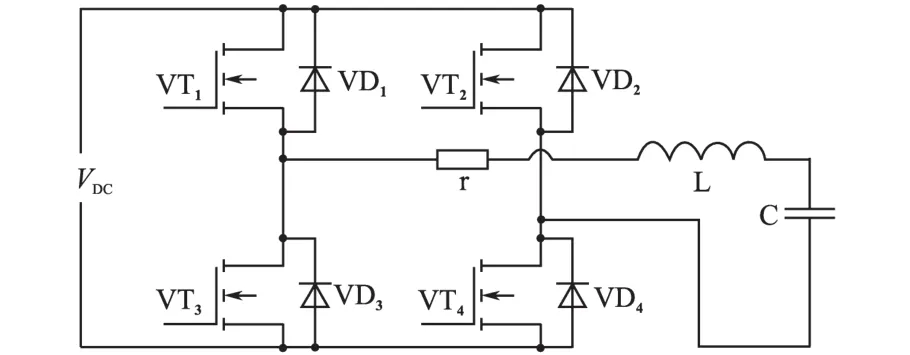
图1 逆变部分功率回路拓扑Fig.1 Main circuit of inverter
本文研究的并联UPS装置其逆变部分采用全桥、LC滤波,功率部分的电路拓扑如图1所示。图1中VDC为直流母线电压,VT1~VT4为全桥逆变使用的IGBT,VD1~VD4为IGBT器件内的体二极管,r为包含了线路的杂散参数、开关死区时间等的等效电阻,L为工频滤波电感,C为滤波电容。滤波电容两端的电压即为装置的交流输出电压。
1.1 未加入瞬时环流控制时的数学模型
逆变部分采用基于虚拟环流阻抗概念的传统比例-积分-微分(PID)控制方法。其控制所用的参数根据文献[3]中介绍的零极点配置法所得,可以保证系统有良好的稳态及动态特性。单机控制框图见图2。其中G(s)为瞬时电压控制器;K为逆变器的增益;Hf(s)为系统的采样环节;Uref为电压给定信号;Uo,Io为输出电压、电流。

图2 逆变部分单机控制框图Fig.2 Control diagram of inverter
由控制框图可以得到单机UPS装置的闭环传递函数:

为了后续的书写方便,记L(s)=Ls+r,P(s)= LCs2+rCs+1+KG(s)Hf(s)。
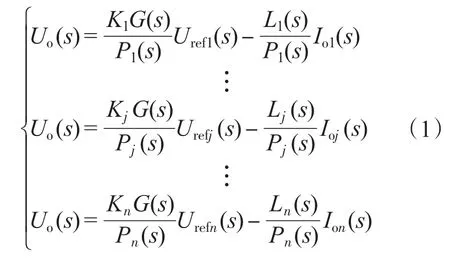
并联的系统方程如下所示:
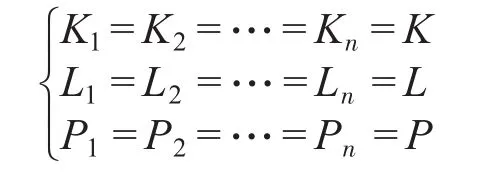
由于并联UPS装置采用数字化控制,其控制器的参数不存在离散性,并且各并联UPS装置间的硬件参数差异非常小,可以认为:
对式(1)求和可得并联系统的外特性,即系统输出电压为

式中:Urefav为系统平均输出参考电压;Iav为系统中各模块平均输出电流。
定义第j台模块的输出环流为并联系统中各模块的平均电流与模块本身输出电流的差,即:

第j台模块的环流表达式为

系统的环流阻抗为

根据式(2)可以看出,若n台UPS装置并联,其并联系统的输出阻抗会减小,系统的虚拟环流阻抗为单机输出阻抗的1/n,即传统虚拟环流控制方法在并联UPS装置较多时,会影响并联系统的输出阻抗,减弱并联系统的抗扰动性能,不易于均流。
1.2 加入瞬时环流控制时的数学模型
在传统虚拟环流阻抗控制方式中加入瞬时环流反馈,即在控制环的给定处引入瞬时环流的参数状态,其单机的控制框图如图3所示。其中Z(s)为瞬时环流调节器,其控制频率与G(s)相同。

图3 加入瞬时环流控制的控制框图Fig.3 Control diagram with instantaneous circulating-current control
由图3可得加入瞬时环流反馈后的单机闭环传递函数:

则并联系统方程组如下:
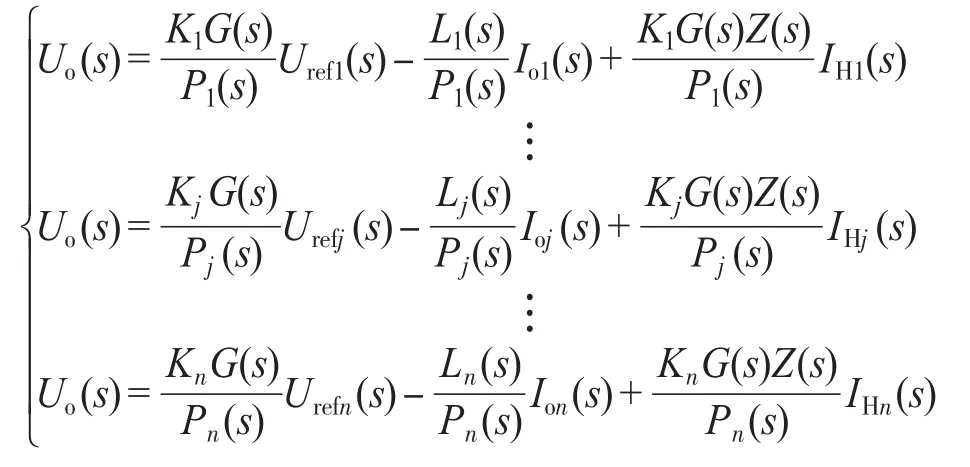
对上式求和可得并联系统外特性为

第j台模块环流的表达式:

可得环流阻抗为

比较两种控制方式的环流阻抗,KG(s)Z(s)相比L(s)要大得多,所以系统加入瞬时环流反馈控制的环流阻抗显著增大,有利于改善系统的均流效果,使系统更易于均流。根据并联系统的外特性计算也可以看出瞬时环流反馈不影响并联系统的输出阻抗,即不会减弱系统的抗扰性能。
2 实验验证
根据以上计算及分析,使用逆变功率拓扑为图1所示的2台容量为2.5 kV·A的工频并机UPS进行实验验证。使用的UPS其直流母线电压为395 V,输出额定电压为220 V,输出电压频率为50 Hz,输出滤波电容为36 μF,滤波电感为800 μH,并且使用变比为1∶1、原边漏感为300 μH的工频变压器。
2台并联UPS空载及满载时的输出电压波形及电压谐波分析如图4~图7所示。其中的电压谐波分析为使用WAVE STAR软件对示波器波形计算而得。可以看出在空载时(图4与图6)工作在2种控制方式下的并联UPS的输出电压谐波含量差异不大,因为在空载时系统输出电流为零,导致瞬时环流几乎为零,使得两种控制方式的差异不大。但是在满载输出时,可以看出加入了瞬时环流控制的并联UPS其输出电压的20次以下谐波明显降低,有效地抑制了并联UPS间的低次谐波,减小了并联系统的低次谐波环流,增加了系统的稳定性。

图4 未加入瞬时环流控制的空载电压波形及谐波Fig.4 Unload voltage and harmonic voltage waveforms without instantaneous circulating-current control
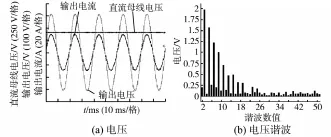
图5 未加入瞬时环流控制的满载电压波形及谐波Fig.5 Full load voltage and harmonic voltage waveforms without instantaneous circulating-current control

图6 加入瞬时环流控制的空载电压波形及谐波Fig.6 Unload voltage and harmonic voltage waveforms with instantaneous circulating-current control
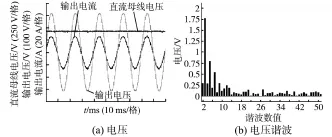
图7 加入瞬时环流控制的满载电压波形及谐波Fig.7 Full load voltage and harmonic voltage waveforms with instantaneous circulating-current control
3 结论
本文使用的控制方法将瞬时环流反馈引入到逆变器PID闭环控制内,使得并联系统在不降低抗负载扰动性能的情况下,大幅增大并联运行的UPS之间的环流阻抗,抑制了低次谐波电压,使得并联系统更加稳定,提高了并联系统的可靠性。
[1]余蜜,张宇,康勇,等.基于改变环流阻抗的并联解耦控制策略[J].电工技术学报,2008,23(10):58-68.
[2]段善旭,刘邦银,康勇,等.UPS并联系统的SPWM再调制控制技术研究[J].中国电机工程学报,2004,24(1):81-86.
[3]彭力.基于状态空间理论的PWM逆变电源控制技术研究[D].武汉:华中科技大学,2004.
An Improved Parallel UPS Control Method Based on Virtual Circulating-impedance
ZHA0 Qiliang,LIU Tianqiang
(XJ Power Co.,Ltd.,Xuchang 461000,Henan,China)
Discussed a circulating current feedback control based on virtual circulating-impedance for traditional parallel UPS which could not effective inhibit low order harmonic voltage to lead to system instability.By modeling analysis,circulating current feedback control was increased to calculate circulating impedance of parallel UPS for the purpose of low voltage harmonic suppression and reduced circulating current.Two experimental 2.5 kV·A UPS were built and paralleled.The results of experiment verify that the improved circulating current feedback control is available and efficient.
parallel;harmonic suppression;circulating current
TM464
A
10.19457/j.1001-2095.20161011
2015-08-27
修改稿日期:2016-04-19
赵启良(1986-),男,本科,工程师,Email:zhaoqiliangdy@126.com
猜你喜欢
粮食问题研究(2022年2期)2022-04-25
新疆钢铁(2021年1期)2021-10-14
汽车维修技师(2019年7期)2020-01-16
航天工业管理(2019年11期)2019-04-20
通信电源技术(2018年5期)2018-08-23
汽车维修技师(2018年11期)2018-05-11
能源(2017年9期)2017-10-18
中学生数理化·高一版(2017年1期)2017-04-25
儿童故事画报·智力大王(2016年6期)2016-09-14
新高考·高一物理(2014年4期)2014-09-17
