
基于MPC的大型车辆防侧翻控制方法
2015-07-20 11:54贺宜褚端峰吴超仲严新平
交通运输系统工程与信息 2015年3期
贺宜,褚端峰*,吴超仲,严新平
(1.武汉理工大学智能交通系统研究中心,武汉430063;2.水路公路交通安全控制与装备教育部工程研究中心,武汉430063)
基于MPC的大型车辆防侧翻控制方法
贺宜1,2,褚端峰*1,2,吴超仲1,2,严新平1,2
(1.武汉理工大学智能交通系统研究中心,武汉430063;2.水路公路交通安全控制与装备教育部工程研究中心,武汉430063)
大型车辆由于其具有重心位置较高、质量较大且轮距相对较窄等特点,比其他车辆更易发生侧翻事故.本文通过建立大型车辆三自由度动力学模型,采用LTR侧翻评价指标,对侧翻状态进行预测.进而基于模型预测控制(Model Prodictive Control,MPC)方法建立车辆防侧翻控制系统的状态空间方程,并以侧偏角和横摆角速度作为状态变量,通过差速制动方式对车辆施加横摆力矩以保持行车稳定性.通过Trucksim与MATLAB/ Simulink联合仿真实验,对该控制算法在典型工况下进行验证.结果表明,防侧翻控制系统能有效抑制车辆发生侧翻,保障行车安全,且侧翻控制的实时性和有效性满足要求.
智能交通;侧翻控制;模型预测控制;大型车辆;联合仿真
1 引言
统计显示,2013年我国包括载客汽车、载货汽车、挂车在内的大型车辆保有量超过1 140万辆[1].大型车辆由于其具有重心位置较高、质量较大且轮距相对较窄等特点,较其他车辆更易发生侧翻事故[2].有研究表明,因大型车辆侧翻造成的人员死亡数是其他车辆的2.4倍[3].大型车辆所引起的侧翻事故形势严峻,造成了严重的人员伤亡和财产损失,其危害已成为社会普遍关注的问题[4,5].
在车辆即将发生侧翻时,驾驶人很难有机会采取应急措施[6].抑制侧翻事故发生最直接的手段是对车辆采取有效的主动式防侧翻控制.文献[7]将滑模控制引入至侧翻控制中.文献[8]基于车辆动力学模型,结合LQR(Linear Quadratic Regulator)及时间-能量最优法,提出了一种辅助控制方法.文献[9]设计了DSC(Dynam ical Surface Control)鲁棒控制器,并分析了防侧翻控制系统的稳定性.以上防侧翻控制方法往往需要精确的控制模型.然而,车辆及其行驶环境均为复杂的系统,车辆在行驶过程中,其状态参数,以及道路环境因素等都存在较大的不确定性[10],这也导致了按理想的精确模型设计出的最优控制算法在实际应用过程中无法保持最优,甚至会导致严重的偏差[11].而模型预测控制方法(Model Prediction Control,MPC)能够克服模型的误差和不确定环境干扰带来的影响,具有较强的鲁棒性[12].因此,本文将模型预测控制方法用以建立大型车辆的主动防侧翻控制策略,通过车辆的横摆力矩控制策略来实现其主动防侧翻控制.
2 车辆动力学建模
考虑到车辆防侧翻控制的实际应用,建立如图1所示的三自由度动力学模型对车辆侧翻动力学进行分析,该模型包含车辆在侧倾向、横摆向和侧向的动力学状态,以满足防侧翻控制的要求.


图1 车辆动力学模型Fig.1 Vehicle dynamicmodel
考虑到轮胎的侧偏特性,对轮胎进行动力学分析,建立线性轮胎模型:
式中 m为整车质量;IX、Iz分别为整车质量绕车身重心X轴的转动惯量和绕Z轴的转动惯量;ay是车辆侧向加速度;γ为横摆角速度;φ为车辆侧倾角;β为质心侧偏角;vx为车辆纵向速度;Ff和Fr分别为车辆前后轮胎的侧向力;af、ar分别为前、后车轮侧偏角;lf、lr分别为重心到前后轴的距离;c和k分别为悬架阻尼系数和悬架等效刚度;δ为前轮转向角.
车辆重心处的侧向加速度在β较小的情况下,可表示为[13]

联合式(1)–式(3),建立车辆运动学方程如下:

式中Io为绕侧倾中心的转动惯量.
三自由度线性动力学模型作为MPC控制系统的基础,即可简化控制设计过程,符合侧翻控制要求,又利于控制系统的实际应用.
3 防侧翻控制算法
本文通过计算车辆横向载荷转移率来判定车辆的侧翻危险,并作为MPC控制系统触发的条件.控制系统计算出保持车辆稳定所附加的横摆力矩,再分别作用到执行机构上,从而对侧翻进行控制.
3.1 侧翻指标
根据美国侧翻法规49 CFR Part 575定义,判断侧翻依据一侧车轮是否离开地面来衡量[14].由于无须针对不同车型来定义不同的门限值[15],普适性好.为此,本文选取横向载荷转移率(Lateral-load Transfer Rate,LTR)[16]作为车辆侧翻指标.

式中Fli为车辆左侧车轮上的垂直载荷;Fri为车辆右侧车轮上的垂直载荷;i和n分别为轴的位置和总的车轴数.
如图2所示,大型车辆防侧翻控制算法通过实时获取车辆的状态信息,利用车辆侧翻模型计算下一个时刻的状态变量,并通过LTR指标来判断侧翻趋势,以触发防侧翻控制器,从而实现抑制车辆侧翻的作用.

图2 侧翻预警算法流程图Fig.2 The diagram of rolloverwarningalgorithm
3.2 MPC控制器
模型预测控制是一种滚动时域控制方法,在每一个采样时刻以系统的当前状态作为初始条件,利用动态预测模型在有限的时域内根据优化对象的性能指标,求解最优化问题,从而得到一个控制序列,将控制序列的控制量作用于被控对象.在下一个采样时刻,再用新的状态控制量求解最优化问题,从而形成一个闭环的控制系统.其目的是用以实现系统预测未来的输出与理想输出之间的跟踪偏差最小,是一种带反馈的控制方法,由于可以在系统出现不稳定的情况下补偿误差,可以很好地处理多变量的问题[17,18].

由于受车辆非线性与外界干扰的影响,理想的横摆角速度和质心侧偏角一般与实际的有所偏差,此时需要一个附加的车辆横摆力矩ΔM以实现对误差的补偿和调整,从而使得实际质心侧偏角与横摆角速度能够趋近理想值.因此,通过外加一个横摆力矩来对车辆侧翻稳定性进行优化控制.
根据上式可以得到离散化的状态空间方程为

为保证系统的控制效果,减小控制量输入,性能指标为

式中Q与R为权重矩阵,控制目标是使系统能快速平稳跟踪期望的轨迹.
在控制系统中,系统状态量与控制量需要满足的如下约束条件:

3.3差速制动控制协调器
差速制动是控制系统在车辆处于不稳定时对相应的轮胎进行制动,使得车辆产生附加的横摆力矩,纠正车辆姿态,以此来抑制车辆的不稳定性.由车轮的受力分析可得,制动力所产生的横摆力矩方程为

对车轮制动进行分配后,需要求解防止车辆发生侧翻附加车轮的制动力.根据车辆动力学原理,建立横摆力矩与制动力的方程.

式中ΔF为外前轮制动力增量;b为轮距;lf为重心到前轴的距离.
轮胎制动力协调策略如表1所示,当车辆行驶过程中过度转向时,其名义横摆角速度小于实际横摆角速度,控制系统对车辆外前轮施加制动压力,得到与车辆转向方向相反的横摆力矩,抑制车辆的过度转向.同理,在车辆不足转向时,其名义横摆角速度大于实际横摆角速度,这时控制系统对内后轮施加制动压力,抑制车辆的不足转向,保持车辆行驶稳定性.
4 仿真分析
美国密西根大学Peng[19]和俄亥俄州立大学Yu[20]等人对TruckSim软件的模型参数进行了验证,并在此基础上进行了控制方面的研究,结果显示仿真车辆模型与实车参数吻合,同时通用、福特等汽车制造商也普遍采用该软件对车辆系统进行开发,以降低成本和风险.因此,为对车辆动力学模型及其防侧翻控制算法进行验证,本文采用TruckSim与MATLAB/Simulink搭建联合仿真实验平台,对所建模型及算法进行试验验证.鱼钩转向和阶跃转向角输入至物理极限行驶工况,可以模拟出车辆侧翻危险.

表1 轮胎制动力协调策略Table 1 The coordination strategy of tires braking force
4.1 鱼钩转向试验
如图3所示,鱼钩试验(Fishhook)要求车辆做两次大幅度回转运动,模拟车辆紧急避障或过度转向的行为,直至一侧轮胎离地发生侧翻.试验在道路附着条件良好的情况下进行(μ=0.8),方向盘转角最大为300°,仿真时长为10 s.

图3 鱼钩转向方向盘转角输入Fig.3 The steeringwheelangle of Fishhook
图4~图8为车辆加载MPC侧翻控制器后的车辆参数对比.从图4可知,无侧翻控制时最大侧向加速度达到了0.9 g,车辆发生了侧翻.而加入侧翻控制之后侧向加速度在短暂波动之后最终趋于稳定状态,显示控制策略保持了车辆的侧翻稳定性.图5显示的横摆角速度的控制效果与侧向加速度效果类似,进行侧翻控制后的横摆角速度相比无控制状态下更稳定.
如图6所示,无控制下的车辆质心侧偏角从2.3 s开始呈线性急剧增加,在4.5 s左右达到最高峰38°,车辆处于不稳定状态;而加载侧翻控制下的质心侧偏角波形较为平稳,车辆保持在一定的稳定状态下.图7显示了有/无侧翻控制下的侧倾角变化,结果显示无侧翻控制下的侧倾角峰值接近于-80°,且波形变化剧烈;而侧翻控制下的侧倾角显示了很好的稳定性.由此可见,侧翻控制策略对于侧倾角控制的效果明显.
侧翻控制系统通过附加的横摆力矩来防止侧翻事故的发生,而后差动控制系统通过对四个车轮的制动压力来调节横摆力矩,因此通过控制四个车轮的制动压力来保持车辆侧翻稳定性.在鱼钩转向时,车辆会在短时间内经历两个紧急转向,在第1-2 s时做急速左转动作,在第3 s左右做急速右转动作.如图8所示,在第2 s左右(即急速左转动作),控制系统根据设定的控制策略增加了右前轮的制动压力近9MPa,产生附加的横摆力矩,以降低侧翻危险;在3 s左右(即急速右转弯动作)时,系统则增加了左前轮的制动压力9MPa以降低侧翻危险.同时为了保持车辆的稳定性,控制系统在随后又对左前轮增加了5MPa制动压力,最终使车辆处于稳定状态.

图4 侧向加速度Fig.4 Lateralacceleration

图5 横摆角速度Fig.5 Yaw rate

图6 质心侧偏角Fig.6 Side slip angle

图7 侧倾角Fig.7 Rollangle
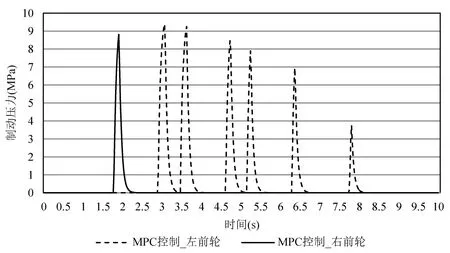
图8 轮胎制动压力Fig.8 Thebraking forceon tires
4.2 阶跃转向试验
阶跃转向测试是模拟驾驶人紧急规避障碍物的情形.如图9所示,入线车速通常设定在80 km/h,在直线行驶一段距离后,将方向盘急速转动200°.实验过程道路附着系数为0.8,仿真时长为6 s.

图9 阶跃转向方向盘转角输入Fig.9 The steeringwheelangle of J-turn
如图10所示,无侧翻控制条件下的车辆侧向加速度波峰处达到了0.9 g后发生了侧翻,相比下加入侧翻控制后在侧向加速度达到0.7 g左右时采取了控制措施,使得侧向加速度逐渐稳定,车辆保持了相对稳定性,未发生侧翻.横摆角速度的稳定性也得到了控制(如图11所示).
如图12所示,无控制下的车辆质心侧偏角从3.5 s开始呈线性急剧增加,在4.5 s左右达到最高峰-30°;对比下加载侧翻控制下的质心侧偏角波形较为平缓.图13为侧倾角对比图,结果显示与质心侧偏角的控制效果类似,但是加载控制下的侧偏角效果尤为显著,从控制波形看,车辆侧偏角基本在0上下波动.
不同于鱼钩转向工况经历的两个紧急转向,车辆在阶跃转向工况只有一个紧急的左转向(发生第2 s左右).从图14可以看出,为了在急转弯时保持车辆侧翻稳定性,系统对右前轮做了制动控制(其余车轮无制动压力),加载了3次制动压力,最终使车辆处于稳定状态.
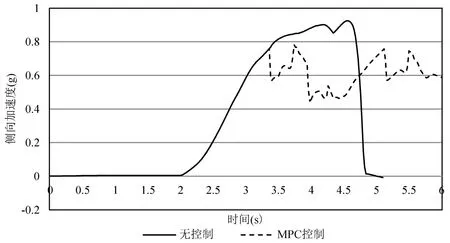
图10 侧向加速度Fig.10 Lateralacceleration

图11 横摆角速度Fig.11 Yaw rate

图12 质心侧偏角Fig.12 Side slip angle
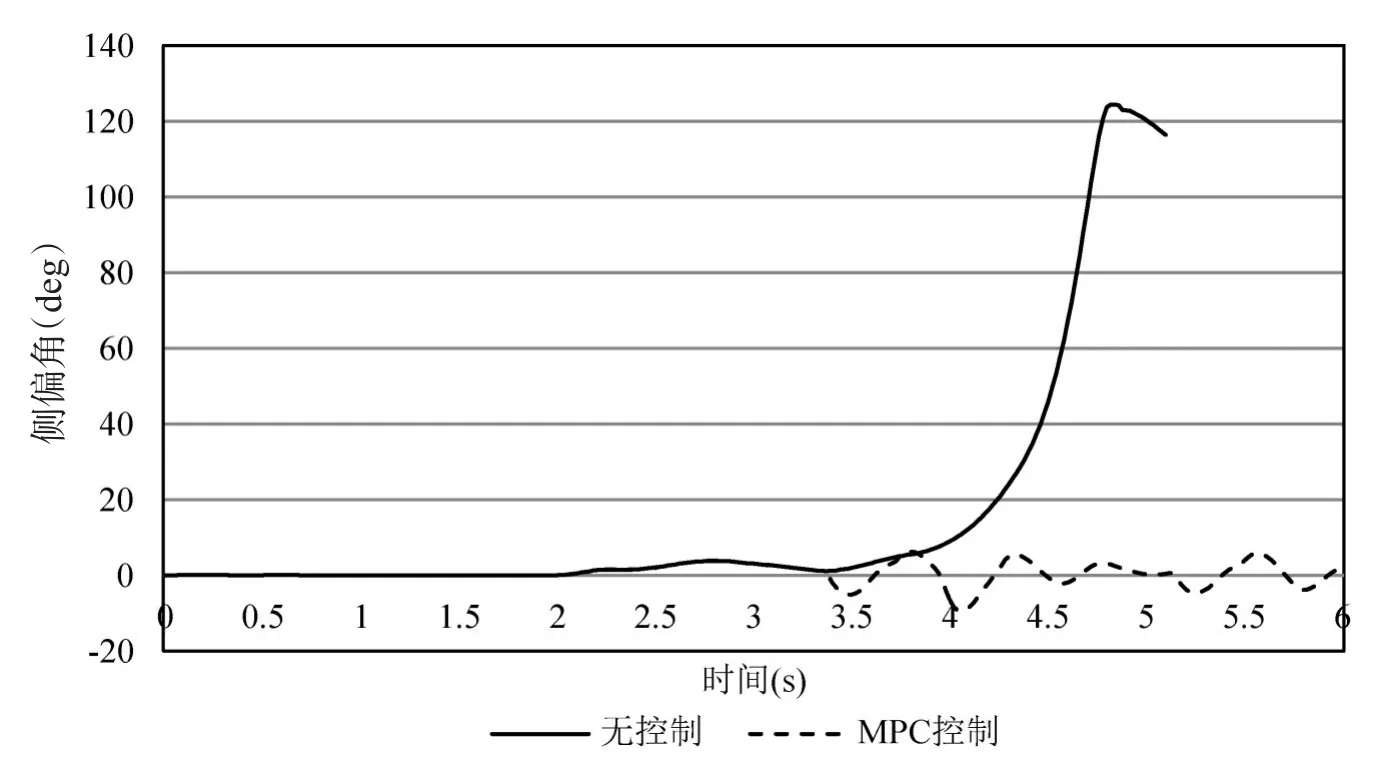
图13 侧倾角Fig.13 Rollangle

图14 轮胎制动压力Fig.14 The braking force on tires
5 研究结论
针对动力学模型的误差和不确定环境干扰带来的问题,本文提出了一种基于MPC的局部最优侧翻控制算法,通过建立控制系统的状态空间方程,以侧偏角和横摆角速度作为状态变量,通过差速制动控制使车辆保持稳定状态.并通过TruckSim与Matlab/Simulink进行了仿真分析.鱼钩转向和阶跃转向仿真试验表明,所设计大型车辆防侧翻控制算法可以提高车辆稳定性,验证了模型的控制效果.
本文的研究工作是在仿真条件下进行的,并未考虑车辆行驶过程中重心高度变化对侧翻的影响,尤其是车辆装载后,货物的运动对于重心高度的影响,需要在后续研究中进一步完善.
[1]公安部交通管理局,中国道路交通事故统计年报[R].北京:公安部交通管理局,2013.[Ministry of Public Security,Transportation bureau.The road traffic accidents statistics report in China[R].Beijing:Ministry ofPublic Security,Transportation bureau,2013.]
[2]王慧丽,史忠科.山区道路车辆侧翻模型与安全分析[J].交通信息与安全,2013,31(03):93-97.[WANG H L,SHIZK.Rollover analysis for vehicle onmountain roads[J].Journal of Transport Information and Safety, 2013,31(03):93-97.]
[3]Miller T L,etal.Characteristics and emissions ofheavyduty vehicles in Tennessee under the MOBILES model[R]//Transportation Research Record:Journal of the Transportation Research Board,No.1842, Transportaion Research Board of the National Academies,Washington,D.C.,2003:99-108.
[4]贺宜,褚端峰,吴超仲,等.路面附着条件对车辆横向稳定性影响的量化分析[J].武汉理工大学学报(交通科学与工程版)2014,38(4):784-787.[HEY,CHUD F, WU C Z,et al.Quantitative analysis of influence on vehicular lateral stability by road surface condition[J]. Journal of Wuhan University of Technology (Transportation Science&Engineering),2014,38(4): 784-787.]
[5]严新平,张晖,吴超仲,等.道路交通驾驶行为研究进展及其展望[J].交通信息与安全,2013,31(1):45-49. [YAN X P,ZHANG H,WU C Z,et al.Research progress and prospectof road traffic driving behavior[J]. Journalof Transport Information and Safety,2013,31(1): 45-49.]
[6]吕集尔,朱留华,郑容森,等.驾驶员反应时间对行车安全的影响[J].交通运输系统工程与信息, 2013,13(2):80-86.[LV J E,ZHU L H,ZHENGRS, etal.Effects of driver’s reaction time on safe driving[J]. Journal of Transportation Systems Engineering and Information Technology,2013,13(2):80-86.]
[7]褚端峰,李刚炎.半主动悬架汽车防侧翻控制的研究[J].汽车工程,2012,34(5):399-402.[CHU D F, LI G Y.A research on anti-rollover control for vehicles with semi-active suspension[J].Automotive Engineering,2012,34(5):399-402.]
[8]朱天军,宗长富.基于LQG/LTR的重型半挂车主动侧倾控制仿真分析[J].系统仿真学报,2008,20(2):476-479.[ZHU T J,ZONG C F.Active roll control simulation and analysis of heavy tractor semi-trailer based on LQG/LTR[J].Journal of System Simulation,2008,20(2):476-479.]
[9]赵治国.车辆动力学及其非线性控制理论技术的研究[D].西安:西北工业大学,2002.[ZHAO Z G.Research on vehicle dynamic,its nonlinear control strategies and related technologies[D].Xi'an: Northwestern PolytechnicalUniversity,2002]
[10]杨信丰,杨庆丰.随机车辆路径问题的模型及其算法[J].交通运输系统工程与信息,2006,6(4):75-80.[YANG X F,YANG Q F.Model and algorithm of vehicle routing problem with stochastic travel time[J]. Journal of Transportation Systems Engineering and Information Technology,2006,6(4):75-80.]
[11]杨建森.面向主动安全的汽车底盘集成控制策略研究[D].吉林大学,2012.[YANG JS.Research on integrated chassis control strategy for vehicle active safety[D].Jilin University,2012]
[12]Borrelli F,Falcone P,Keviczky T,et al.MPC-based approach to active steering for autonomous vehicle systems[J].International Journal of Vehicle Autonomous Systems,2005,3(2):265-291.
[13]郭孔辉.汽车操纵动力学[M].吉林科学技术出版社, 1991.[GUO K H.Vehicle handling dynamics[M].Jilin Science&Technology Press,1991.]
[14]Dccupant Crash Protection NHTSA Federal Motor Vehicle Safety Standard Part571.208.2004.12.
[15]余志生.汽车理论[M].北京:机械工业出版社,2009:144-146.[YU ZS.Automobile theory[M].Beijing: ChinaMachine Press,2009:144-146.]
[16]Chen Bo-chiuan.Warning and control for vehicle rollover prevention[D].The University of Michigan: DepartmentofMechanical Engineering,2001.
[17]Morari M,H Lee J.Model predictive control:past, present and future[J].Computers&Chemical Engineering,1999,23(4):667-682.
[18]Richalet J.Industrial applications of model based predictive control[J].Automatica,1993,29(5):1251-1274.
[19]Chen B C,Peng H.Differential-braking-based rollover prevention for sportutility vehicleswith human-in-theloop evaluations[J].Vehicle System Dynamics,2001,36 (4-5):359-389.
[20]Yu H,Güvenc L,ÖzgünerÜ.Heavy duty vehicle rollover detection and active roll control[J].Vehicle System Dynamics,2008,46(6):451-470.
Anti-rollover Control for Heavy-duty Vehicles Based on Model Prod ictive Con trol
HEYi1,2,CHU Duan-feng1,2,WU Chao-zhong1,2,YAN Xin-ping1,2
(1.IntelligentTransportation Systems Research Center,Wuhan University of Technology,Wuhan 430063,China; 2.Engineering Research Center for Transportation Safety,M inistry of Education,Wuhan 430063,China)
The heavy-duty vehicles have high gravity-center,narrow track and large size,therefore the rollover lim it value is lower than other kinds of vehicles,which may easy to cause rollover accidents.A 3-DOF rollover and control model is established for HDVs and the LTR index is proposed to predict the vehicle rollover.Then,the state-space equation of anti-rollover control system is built based on model prediction control(PMC).The side slip angle and yaw rate is seen to be state variable in the control system. The additionalyaw moment can be coordinated by differentialbraking controlmodel.Finally,the program is compiled based on the Trucksim/Simulink platform.The results show that the anti-rollover control system proposed can prevent the vehicle rollover effectively and enhance the driving performance of the vehicle on effectivenessand timeliness.
intelligent transportation;anti-rollover control;model prediciton control;heavy-duty vehicles; combination simulation
1009-6744(2015)03-0089-11
U461.91
A
2015-02-10
2015-04-14录用日期:2015-04-15
国家自然科学基金资助(51105286);中央高校基本科研业务费专项基金资助(2014-IV-137);同济大学道路与交通工程教育部重点实验室开放基金资助(K201301);车路协同与安全控制北京市重点实验室开放基金资助(KFJJ-201401).
贺宜(1986-),男,江西人,博士生.*通信作者:chudf@whut.edu.cn
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
航天器工程(2014年5期)2014-03-11
铁道建筑(2010年11期)2010-07-30
