基于观测数据拟合的天文自主定位算法
2015-06-01 12:30苏轼鹏韩云东王安国
系统工程与电子技术 2015年4期
李 伟,苏轼鹏,韩云东,王安国
(海军大连舰艇学院航海系,辽宁大连116018)
基于观测数据拟合的天文自主定位算法
李 伟,苏轼鹏,韩云东,王安国
(海军大连舰艇学院航海系,辽宁大连116018)
根据海上天文定位原理,太阳上中天时的格林半圆时角等于测者所在位置的经度,但六分仪观测难以确定太阳上中天的较准确时间,由此产生的经度误差往往过大,不能满足航海需求。采用数据拟合技术对太阳高度曲线进行拟合处理,能够比较准确地求出太阳上中天的时间,从而给出了不需要推算船位的天文定位算法。通过海上大量实验结果表明:该算法定位周期短、简便易行且有利于减小偶然误差。采用现有六分仪进行观测,定位的纬度最大误差为0.8,经度最大误差为2.5,满足海上航行的导航精度要求。
观测数据;拟合;天文自主定位算法
0 引 言
天文导航以空间天体作为导航信标,是一种完全独立的导航方式[1]。在昼间,太阳移线定位需要等待太阳方位出现一定幅度变化以后才可进行下一次观测,最短需要70~90分钟的时间。在此期间,推算舰位的积累误差也在增加,而推算舰位作为传统天文定位的必要参数将直接影响天文舰位解算精度[2]。
可以看出,若在白天利用观测太阳上中天高度定位,求解纬度需要获知太阳上中天的真高度;而要求解太阳上中天时的经度,则需要准确获知天体上中天时的世界时。从精度上讲,观测太阳上中天高度求纬度,在熟练的操作水平下,若每隔3分钟观测一次,以观测最大值和对应的时间作为依据进行计算求解,则纬度误差一般不超过2′.0,这是因为,在天体上中天前后,其高度变化速度最慢[3]。但是在测者经度的求解上,由于太阳时角变化速度相对均匀(每分钟约15′.0),若以相同的数据作为计算依据,则平均可产生20海里的计算误差,这显然不能满足航海定位的精度要求。而对于这种性质的定位误差,虽然数值较大,但传统的天文作图求解手段无法消除或改进,这是定位的主要困难[4]。
根据天文定位的基本原理,在天体上中天时,天体位于测者午圈之上,与测者天顶具有相等的天体时角,这样测者经度就有求解的可能。而利用天体上中天前后进行观测求纬度的方法已经较为成熟,将两者进行有机结合便可进行计算求解实时舰位[5]。
1 基本原理
1.1 纬度的求解
在天文三角形中,天体真高度h、天体赤纬δ和测者纬度φ的关系[6]为

图1为天文三角形示意图。当天体上中天时,天体的地方半圆时角t=0°,然后把h替换为90°-Z(Z为天体顶距),这时,式(1)变为

整理可得

即

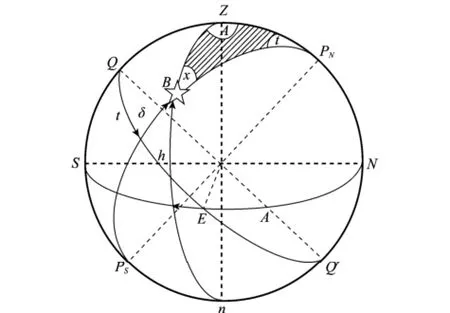
图1 天文三角形
图2 为测者纬度、天体赤纬和上中天方位关系示意图。为方便使用,现对图2所示子午顶距与太阳方位关系进行如下规定[7]:
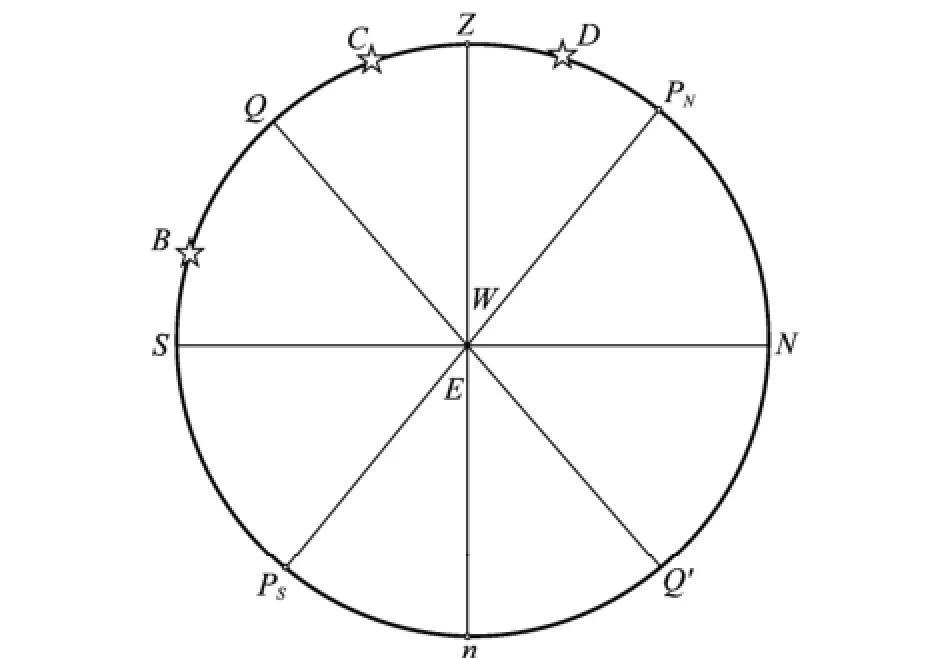
图2 测者纬度、天体赤纬和上中天方位关系示意图
上中天时,若天体方位为北,其子午顶距Z的命名为南;若天体方位为南,其子午顶距Z的命名为北。那么,观测天体子午高求纬度可归纳为
当Z与δ同名时

纬度方向与Z(或δ)相同。
当Z与δ异名时

大项减小项,纬度方向与大项相同(Z或δ)。
1.2 经度的求解
在图2中,天体上中天时,天体与测者天顶同位于测者午圈之上,具有相同的天体时角[8]。根据天球定义和海上天文定位原理,此时测者经度就等于天体的格林半圆时角。
若获知天体上中天时的世界时,则可根据天体视运动规律,查表或计算求得天体的格林西行时角tG,进而求得测者经度λ[9]。
即
当tG<180°时,λ(西经)=tG;
当tG>180°时,λ(东经)=360°-tG。
根据天体周日视运动和球面几何原理,对于特定纬度的测者来说,天体高度公式[10]可表示为

式中,t为太阳地方半圆时角。
以平均纬度(45°)和太阳的平均赤纬(0°)代入式(7),并把时角表示为世界时T(以时为单位)的形式,可得太阳真高度h(单位为度,以0°经线测者为例)的数学表达式为

式中,η为时差,最大不超过7分钟,可由年历查得。据此,由三角函数和反三角函数的性质可知:当世界时为12时前后时,太阳高度达到最大值[11]。
以平均时差代入式(8)可得太阳高度关于时间(11时50分至12时10分)的变化曲线,如图3中“原高度曲线”所示。
由图3可以看出,在(12-1/6,12+1/6)的范围内,太阳真高度关于时间的函数图像在平面坐标系内是一段连续可导的平滑曲线,对其按(T-12)的幂进行泰勒公式展开[12]


由泰勒公式性质可知,当T接近于12时,拉格朗日型余项是比(T-12)3高阶的无穷小,而(T-12)3最大为(1/6)3(°),也就是说,在(T-12±1/6)时,式(9)可写为

表达式变为关于T的二次函数曲线。据此,在区间(T-1/6,T+1/6)上等间距取5个点(如表1所示)进行数据拟合,在Matlab集成环境下,可得基于最小二乘的太阳拟合高度的二次曲线表达式为

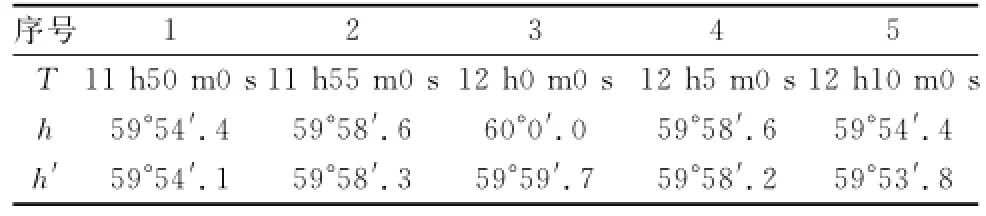
表1 天体真高度与拟合高度对比
由表1数据看以看到:拟合高度曲线的最大值与原高度曲线最大值(即为子午高)只有0′.3的误差,对应产生同样大小的纬度误差;而在时间上,二次曲线的对称轴为11.998时,即为11 h59 m53 s,对应产生的经度误差为1′.6。
2 误差分析
在测者静止的情况下:
对于纬度,算法采用求拟合函数极值的方法求解太阳上中天时的顶距,而太阳赤纬又随时间变化不明显(在分点时,20分钟最大变化量为0′.3),故纬度误差主要取决于拟合高度曲线的最大值与真实值的误差。在不考虑观测误差的情况下,由式(9)分析,误差不应超过1/216度即0′.4。在极端情况下,若观测值均同向偏离0′.2,则可导致0′.6的纬度定位误差。
对于经度,由式(8)和图3可知,太阳真高度曲线关于其上中天时刻对称,而求解经度正是通过拟合其对称轴的方法获取。所以,经度误差的大小主要取决于观测数据是否真实客观。若上中天前的观测值普遍偏大而上中天后的观测值普遍偏小,则拟合曲线对称轴左移,反之则右移。由于太阳时角变化较快,所以,经度误差对于这种偏离较为敏感。对于熟练的测者,在极端情况下,若一侧观测高度均偏高(或偏低)0′.2而另一侧观测高度均偏低(或偏高)0′.2,则可导致对称轴左移(或右移)10 s,对应产生2′.5的经度定位误差。
在测者移动的情况下:
在移动的载体上进行观测,可按照修正异顶差的方法,在观测时间不变的前提下,根据载体移动的航迹向和对地航速,把所有观测高度修正到最后一次观测的同顶高,这样可定出最后一次观测时的天文舰位。
修正异顶差的误差,若采用查表的方法,则主要来源于把大地球面当做平面来处理的计算误差。经测算,在30分钟内,航速不超过50 kn(节)的情况下,最大误差不超过0′.2。若采用球面三角形进行计算,则基本不产生修正误差。
由定位误差分析可知,修正误差主要对纬度的定位精度产生影响。
3 拟合算例
2013年4月13日,具有熟练观测水平的某测者在某次测天定位实践中,在太阳上中天前后连续观测5组数据(时间间隔无须相等,数值如表2所示),由罗经测得太阳上中天时方位为北。

表2 某次太阳上中天前后的观测数据
对表2数据进行最小二乘的数据拟合,为保证拟合精度,横轴时间单位精确到分钟。拟合后可得图4所示的二次曲线,其表达式为

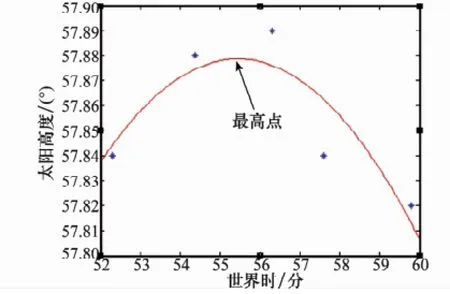
图4 太阳真高度最小二乘法的数据拟合
根据拟合曲线表达式可得,太阳在世界时3 h 55 m27 s时达到最大值57°52′.8。
根据太阳上中天时的世界时可求得此时测者经度为121°16′.5E;太阳赤纬为9°5′.0N。
由式(5)可得此时测者纬度为41°12′.2N。
在2012年郑和舰环球航行的远航实习教学中,在不同纬度的海区进行了5组拟合实验,表3~表7是拟合舰位与差分全球定位系统(global position system,GPS)舰位对比结果。

表3 2012年5月7日,GPS读数:φ38°46′.0N,λ121°.16′.0E

表4 2012年5月29日,GPS读数:φ4°12′.0N,λ91°.36′.0E

表5 2012年6月30日,GPS读数:φ46°30′.0N,λ13°.16′.0W

纬度误差:0′.6;经度误差:2′.2。

表7 2012年9月2日,GPS读数:φ21°24′.0S,λ155°.38′.0E
(2)GPS数据的解算模型为WGS-84坐标系下的地球椭球体,而天文定位的解算模型为大地球体,二者在局部的最大位置误差为0′.5。
4 结 论
大量实验结果表明:
(1)可利用数据拟合的方法求解太阳上中天时的时间进行船舶定位,对于熟练的观测者来说,纬度最大定位误差为0′.8,经度最大定位误差为2′.5。
(2)该方法可最大限度地减小观测的偶然误差。根据偶然误差的正态分布规律,其观测值应该对称分布在真值曲线周围。而从最小二乘的原理和实例数据可以看出,离散分步的观测值均匀散落在拟合曲线周围,有效减小了偶然误差对于定位精度的影响。
(3)为保证观测的及时有效,应提前检查规正六分仪、测定指标差,确保观测数据可用。若太阳上中天方位为南,应该在太阳圆周方位到达170左右即开始观测采样;若太阳上中天方位为北,应该在太阳圆周方位到达010左右即开始观测采样。采样数据务求准确,采样时间间隔不必相等。
至此,我们可以得到如下结论:用数据拟合的方法确定太阳上中天的高度和时间的方法在理论上是完全可行的,其定位精度完全可以满足一般航海的要求。这种天文自主定位算法不需要推算舰位,没有积累误差,为修正推算舰位和其他形式的天文定位提供了必不可少的前提,可有效提升舰船在大洋航行的自主导航能力。
[1]Wang A G,Jia C Y,Sun P.Precise apparent position calculation of star in navigation[J].Journal of Traffic and Transportation Engineering,2004,4(4):117 120.(王安国,贾传荧,孙鹏.航用恒星视位置高精度计算[J].交通运输工程学报,2004,4(4):117 120.)
[2]Wang G R,Liu Q.A new algorithm of calculating the apparent place of fixed star[J].Applied Science and Technology,2006,33(2):36 39.(王桂如,刘强.一种求恒星视位置的新算法[J].应用科技,2006,33(2):36 39.)
[3]Titterton D H,Weston J I.Strap down inertial navigation technology[M].London:Peter Peregrinus Ltd,1997:56 77.
[4]US Naval observatory.Celestial augmentation of inertial navigation systems:a robust navigation alternative[R].Washington:SPAWAR System Center,2000.
[5]Liebe C C,Gromov K,Meller D M.Toward a stellar gyroscope for spacecraft attitude determination[J].Journal of Guidance Control and Dynamics,2004,27(1):91 99.
[6]Berman C M.Static thrust study of an airboat propeller[R].USA:AIAA 2003 113,2003.
[7]Atkinson D,Agnew J,Miller M.The B-2 navigation system[C]∥Proc.of the IEEE Aerospace and Electronics Conference,1993:345 354.
[8]Kaplan G H.Determining the position and motion of a vessel from celestial observations[J].Navigation Journal of the Institute of Navigation,1995,42(4):631 648.
[9]Psiaki M L.Autonomous orbit determination for two spacecraft from relative position measurements[J].Journal of Guidance Control and Dynamics,1999,22(2):305 312.
[10]Hye Y,Oung K,Joh J.Self-organizing guide star selection algorithm for star trackers:thinning method[C]∥Proc.of the IEEE Aerospace Conference Proceedings,2002:2275 2283.
[11]Bae B S,Schutz E.Geosciences laser altimeter system precision altitude determination[R].Center for Space Research:The University of Texas at Austin,2002:148 154.
[12]Colozza A J.APEX 3D propeller test preliminary design[R].USA:NASA/CR 2002(21):1866.
Data fitting based algorithm for astronomy autonomous positioning according to observation data
LI Wei,SU Shi-peng,HAN Yun-dong,WANG An-guo
(Navigation Department,Dalian Naval Academy,Dalian 116018,China)
According to maritime astronomy positioning principle,the special nature of the sun can be used for astronomical positioning.When the sun transits,the green semicircle angle is equal to observer’s longitude.According to the law of the sun’s apparent motion,when one uses a sextant,it is difficult to determine the transit time of the sun,and the longitude error will be introduced.In order to solve this problem,combined with data fitting techniques,first the feasibility of fitting solar altitude curve is discussed and demonstrated,then a celestial autonomous positioning method is proposed that doesn’t need projected position.Experimental results showed that the positioning cycle with the algorithm is short,it is simple to carry out and helps to reduce accidental errors.Under skilled observation level,maximum error of latitude and longitude are 0.8 and 2.5,which can fully meet the needs of the general maritime activities.
observation data;fitting;astronomy autonomous positioning algorithm
P 128.2
A
10.3969/j.issn.1001-506X.2015.04.28
李 伟(1980 ),男,讲师,博士研究生,主要研究方向为现代天文导航技术。E-mail:apuredrop@163.com
苏轼鹏(1980 ),男,讲师,硕士,主要研究方向为现代气象导航技术。E-mail:apuredrop@tom.com
韩云东(1977 ),男,副教授,博士,主要研究方向为现代电子导航技术。E-mail:gyro-han@163.com
王安国(1954 ),男,教授,博士,主要研究方向为现代天文导航技术。E-mail:apuredrop@sina.com
1001-506X(2015)04-0907-04
2014- 03- 14;
2014- 08- 26;网络优先出版日期:2014- 10- 28。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141028.1618.008.html
国家科技支撑计划(2012BAH36B00)资助课题
猜你喜欢
中国惯性技术学报(2020年2期)2020-07-24
学校教育研究(2019年21期)2019-11-11
中国眼镜科技杂志(2019年7期)2019-07-17
中国眼镜科技杂志(2019年3期)2019-03-18
齐鲁周刊(2017年29期)2017-08-08
中国眼镜科技杂志(2017年21期)2017-01-18
天文爱好者(2016年6期)2016-12-21
中国人力资源开发(2010年3期)2010-01-22
中学政史地·初中(2009年11期)2009-01-05