临空高速目标协同探测跟踪需求分析
2015-06-01 12:30郭相科刘昌云张小宽
系统工程与电子技术 2015年4期
付 强,王 刚,郭相科,刘昌云,张小宽
(空军工程大学防空反导学院,陕西西安710051)
临空高速目标协同探测跟踪需求分析
付 强,王 刚,郭相科,刘昌云,张小宽
(空军工程大学防空反导学院,陕西西安710051)
临空高速目标具有高空、高速、机动能力强、雷达散射截面积小等特性,仅靠单一探测手段难以发现和稳定跟踪。在分析临空高速目标的运动、电磁及红外特性的基础上,探讨了目前雷达、红外平台探测跟踪能力的不足,提出了多平台协同探测跟踪临空高速目标平台与载荷需求、多平台协同工作流程。最后,初步仿真验证了天基多平台的协同探测能力需求。研究可为反临空高速目标的探测跟踪系统发展提供理论和技术支持。
临空高速目标;多平台协同;探测跟踪;需求分析
0 引 言
临空高速目标具有飞行高度高、速度快、机动性强、无固定轨迹的特点,导致传感器信号检测困难[1-2],仅靠单一探测平台难以捕获及稳定跟踪目标。因此综合利用各种空、天、地基探测传感器获得的各类观测信息,如天基红外信息、可见光学图像信息、地基的雷达探测信息等,通过各类传感器之间的协同互补,将是针对该类目标探测跟踪的有效途径。
目前国内外对动目标检测跟踪、多传感器协同等方面的研究较多,文献[3- 4]研究了基于天基雷达背景下对目标跟踪的研究,文献[5- 7]提出了多传感器基于协同作战能力的3种航迹合成方法(数据融合、互补跟踪及接力跟踪)。针对临空高速目标探测跟踪领域的研究尚处于探索阶段,对临空高速目标的探测跟踪比普通动目标复杂,传感器协同也要求更高,但针对动目标的跟踪平台交接和航迹合成等方法可以结合对临空高速目标的研究,推广应用到临空高速目标跟踪问题。本文在研究临空高速目标运动、电磁散射及红外辐射特性的基础上,探讨了目标特性对传感器探测发现、稳定跟踪、大空域连续跟踪等带来的影响。进而分析目前探测跟踪平台应对临空高速目标能力的不足,提出了多平台协同探测跟踪平台和载荷需求,对探测跟踪临空高速目标的多传感器协同工作流程进行研究,最后仿真验证了天基平台协同的可探测性。
1 临空高速目标特性分析
1.1 运动特性分析
临空高速目标主要依靠各类发动机提供动力,在进入临近空间后,与弹道导弹的运动特性不同,临空高速目标具有很强的变轨能力。它能够在很短的时间内完成加速,在巡航段开始几百秒的时间内速度马赫数就可达6~7,甚至达到20。高超声速特性使目标在相干积累时间内跨越多个距离单元,产生距离走动效应,造成检测困难。
典型临空高速目标的运动轨迹以X-51A为例,可以简化为3个阶段:助推段、巡航段和攻击段,其中,巡航段又包括爬升段、平飞加速段和等速巡航段,飞行过程如图1所示。
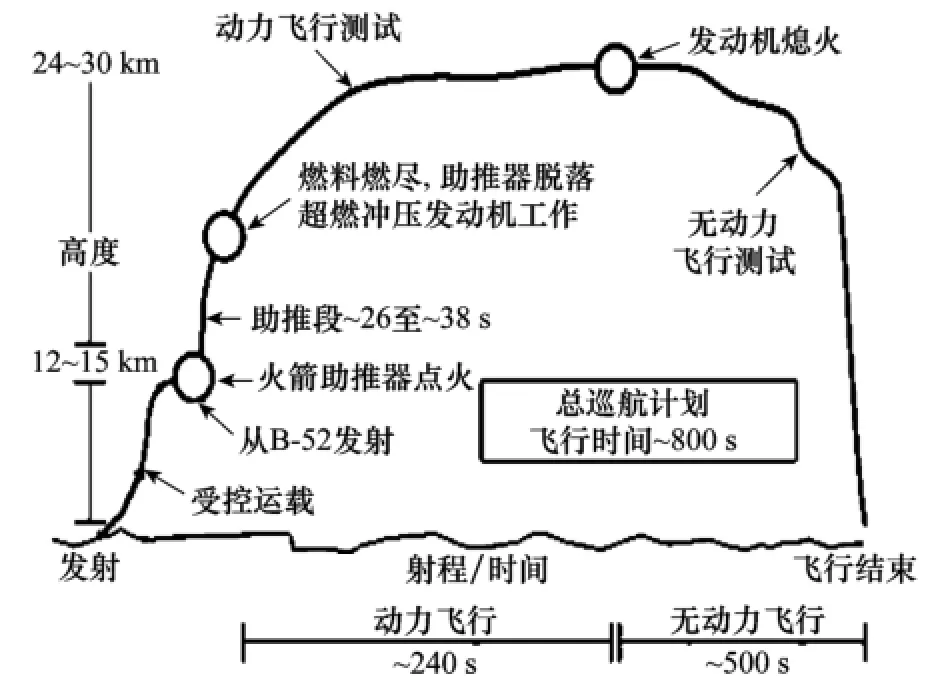
图1 X-51A的飞行过程
X-51A从在B-52上起飞开始,跨层至临近空间巡航,再到目标上空重返对流层对目标实施打击,其飞行高度跨过对流层和临近空间,飞行过程分别采用了飞航式、跳跃式和弹道式。
1.2 电磁特性分析
临空高速目标电磁特性机制复杂,甚至一些散射机制从机理上尚未探索清楚。因此,对其电磁特性的研究是一个长期的过程。
临空高速目标的电磁特性由飞行器结构特性以及飞行器本体、周围流场、尾迹流场的电磁特性所决定。由于临空高速目标结构特性导致其本身雷达散射截面积(radar cross section,RCS)就很小,无论是水平极化还是垂直极化,其RCS大小差别不大,通常在0.01 m2左右[8],在迎击和尾追方向,RCS更小。另一方面,其飞行空域大部分时间在20~100 km之间,进入大气层后,由于强烈的激波压缩和粘性摩擦作用,飞行器周围的温度迅速升高[9]。高温使空气发生电离,也使防热材料被烧蚀,这样在飞行器周围形成十分复杂的电离层,该电离层即等离子体鞘套。
由于等离子鞘套的作用,在不同电磁波长的情况下,当雷达波照射到临空高速目标时,会形成多种折射、电磁特性衰减或激增等模式。比如在目标冲压发动机工作,速度大幅提升时,目标电磁特性衰减。当发动机关闭,在滑翔阶段中,其电磁特性激增[10]。同时,临空高速目标尾部将形成等离子体尾流,尾流对雷达波造成强烈的散射,形成雷达目标特性衰减现象。
1.3 红外特性分析
临空高速目标在大气层中飞行,决定了本体的红外特性主要是灰体辐射。其次是高温等离子体尾迹的红外特性[11]。在极高超声速条件,飞行器本体被加热、烧蚀,并有大量的烧蚀产物注入到等离子体流场中。流场的红外特性主要与本体防热材料的烧蚀模式、烧蚀状态和烧蚀产物有关,在本体周围形成非线性、非灰体的强烈红外辐射。而等离子流场的辐射特性比较复杂,这是由于飞行高度、速度、姿态及相应的大气物理环境不同,导致临空高速目标等离子体包覆流场各点的气体温度、组份、热力学状态也不同,使得光谱分布较平衡态有很大偏离,与灰体辐射差别较大[12]。
临空高速目标在稳定平飞阶段,峰值波长处于短波,由于其飞行高度在20~100 km,导致地面、空中的强背景噪声容易将信号淹没。当临空高速目标处于机动、连续滑翔/跳跃阶段时,峰值波长不断发生变化,面临强变回波噪声影响,辐射强度较弱。同时红外频谱随着不同的运动阶段发生变化。
2 探测跟踪临空高速目标能力分析
2.1 雷达探测能力分析
雷达探测跟踪临空高速目标受两个方面的影响。一方面由于地球曲率避挡带来的低仰角探测,使得地基雷达对低空飞行的目标存在视线盲区,从而使得预警能力下降。另一方面,目标的高速、机动也大大降低预警雷达系统和制导雷达系统的检测概率、跟踪距离和精度。
2.1.1 地基雷达基本探测能力分析
地基雷达探测面临的首要问题是地球曲率的影响。目前远程导弹预警雷达为了提高对弹道目标的探测跟踪距离,常采用封边、封海的方式[11],即尽可能沿地平线设置截获屏,按照一定的截获概率设置方位和截获屏的厚度,确保对弹道类目标穿越截获屏时进行可靠截获;但对于20~100 km高度平飞穿屏、且可以进行水平机动的临近空间目标而言,截获屏模式在探测概率、预警时间以及雷达资源利用率急剧下降。地基雷达对弹道目标、临空目标探测能力,如图2所示。

图2 地基雷达对弹道目标、临空目标探测能力
通过文献[12]中引导条件下雷达搜索空域计算方法,结合临空高速目标在平飞穿屏时的飞行速度及高度,并假设在有效拦截窗口内拦截目标要求所需要的预警时间为400 s左右。若在拦截窗口内拦截目标,所需的预警距离如图3所示。

图3 所需预警距离与拦截窗口的关系
2.1.2 雷达探测跟踪信号检测能力分析
为提高雷达目标的检测概率,最直接的方法是增大发射机的平均功率;同时为了兼顾距离分辨率,需要信号有较大的带宽。因此,雷达多采用线性调频(linear frequency modulation,LFM)的信号体制,并对回波进行匹配滤波,提高距离分辨率和信噪比(signal-to-noise ratio,SNR)[13]。但是仅通过对LFM信号进行脉冲压缩所提高的SNR是不够的,为进一步提高回波SNR,提高目标检测概率,通常对回波进行相干积累或非相干积累处理。脉冲积累通过牺牲时间来换取目标回波能量,可显著提高SNR。
对于临近空间目标,其特点为目标RCS弱小,且运动速度极快,回波积累数量就会减少,这就给脉冲积累处理带来困难。传统的相干积累要求目标在积累时间内的运动距离不超过半个距离单元。若采用LFM脉冲压缩的雷达信号处理体制,其距离单元可以小到只有几米,在相干积累时间内,目标可能跨过六七个距离单元,产生距离走动,导致传统的相干积累失效,使得数据率和检测率更低。
假设已实现时频对齐,LFM脉冲信号模型描述[14]为

式中,NS为采样点数;NP为脉冲数;幅度因子Ak=A ejφk,模A为脉冲幅度,φk为无用参数,不估计;εk为复高斯噪声;f0、φ0和K分别为相位调制的载频、初相和调制斜率;TS为采样间隔。在相同采样间隔内,速度增加,导致采样点数减少,从而使脉冲信号减弱。
若I为定位信号n在k时刻发射的信号强度,L为信号传播衰减,则Sn(k)=I-L为接收到的信号强度,设Tn为第n种定位信号的检测阈值,检测概率为
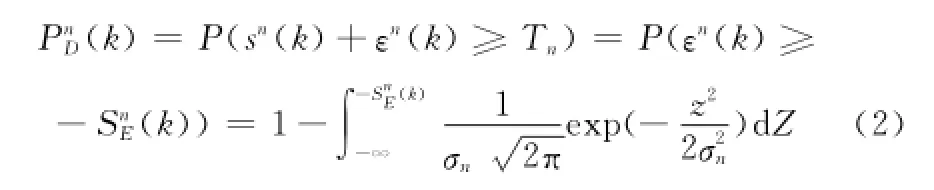
仿真结果如图4所示。重复频率为1 000 Hz,脉冲宽度为1×10-6s,c为光速,距离分辨率为10-6×c/2 m,目标速度为6 800 m/s,方位角覆盖范围30°,天线扫描时间0.9 s。NP增加时会使检测概率增加,但目标距离的增大使检测概率显著减小。当目标距离超过50 km,NP=1时,检测概率显著下降。NP=50在150 km内检测概率显著优于NP=10。当目标距离过大时,NP增加效果不明显。
“小广告是城市‘牛皮癣’,条例对户外广告尤其是垃圾广告进行了严格规范,但在城市的小街小巷、楼宇楼道,办证、刻章、贷款等小广告还屡见不鲜。请问城管部门将采取哪些措施遏制这类问题?”王立军委员发问。市城市管理执法局局长孙九鹏坦言,整治城市“牛皮癣”是一项长期而艰巨的工作,稍有松懈就会反弹。“下一步,我们将继续保持高压态势,完善整治工作各项运行机制和规章制度,更加注重部门协作配合,疏堵结合清除管理盲区,坚决做好小广告清理整治工作。”
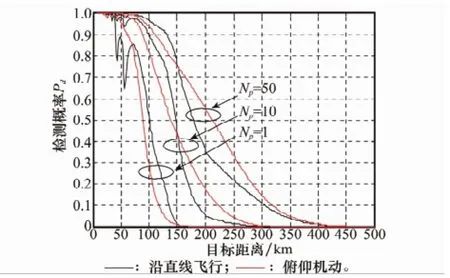
图4 不同积累脉冲数俯仰机动的检测概率
图5 为不同速度的目标检测概率曲线。从图5中可以看出,速度越大,检测概率相对有所降低,其实质是因为当积累脉冲数不变时,目标速度增加导致飞行的距离越过检测距离,从而产生了距离走动。由于目标速度过大,特别是马赫数为20时,产生非常明显的距离走动,检测概率不稳定,导致曲线抖动。马赫数为6和马赫数为12的曲线差别不明显,由于速度均没有超过检测波门的阈值(马赫数为20时明显超过阈值),对检测概率而言差别不大,但也产生距离走动,曲线较为不稳定。
图5 不同速度的目标检测概率
2.2 红外探测能力分析
影响红外探测能力的主要因素是目标的红外强度和谱段。临空高速目标在助推段时,由于传感器的物理特性和部署地域的限制,使得地基和空基传感器的性能有限,为了能在助推段探测到临空高速目标,主要通过天基红外传感器来完成。临空高速目标在巡航段飞行时,气动加热导致临空高速目标表面温度较高,可达到2 000 K左右。对于有动力飞行器,主要采用超燃冲压发动机或组合发动机作为动力,发动机尾焰温度将达几百至上千度。据此分析,此阶段临空高速目标的红外辐射强度相对有利于实现红外探测。
以X-51A为例。根据分析预测红外特性可得高超声速巡航导弹X-51 A的辐射信息如表1所示[15]。

表1 X-51A红外辐射信息
文献[16]研究了在不同红外强度下红外探测距离的推算方法,本文在此基础上结合传感器探测灵敏度。得出在不同检测灵敏度、不同红外辐射强度下,红外传感器探测能力分析如图6所示。
图6 红外探测距离 检测灵敏度 辐射强度的关系
以典型地球同步轨道的高轨天基导弹预警卫星为例[17],在理想情况下,根据X-51 A的粗略红外辐射强度值,并根据天基导弹预警卫星的基本性能,可分析得出天基导弹预警卫星对X-51 A的探测跟踪能力,如表2所示。

表2 天基导弹预警卫星对X-51A探测跟踪能力
根据分析,目前发展中的天基预警卫星针对X-51A等目标,理论上具备一定的探测能力,但在跟踪能力上较弱。
3 多平台协同探测跟踪需求及体系
通过上述分析,由于临空高速目标具有大空域、高速、机动能力强、RCS弱等特点,在不同的运动阶段具有不同的频谱特性,单一探测跟踪系统无法提供临空高速目标的全程、多维信息。因此通过以天基,空基、地基多平台,构建天地一体化的信息网,综合利用空天地多平台多谱段的优势,实现对临空高速目标的快速分析与捕获、稳定跟踪和准确识别。其中天基系统负责全球区域大范围的早期预警跟踪,空基、地基主要负责目标的稳定跟踪和识别。天基、空基和地基探测预警系统密切协同,形成一个有机的临空高速目标探测跟踪信息网。
3.1 探测的平台及载荷需求
3.1.1 雷达探测跟踪平台及载荷需求
针对临空高速目标,传统的地基探测跟踪平台采用封海、封边的搜索屏探测方式,其有效探测时间短,无法满足预警的时间需求,并且由于远程预警雷达的阵面朝向境外,不具备对内陆上空飞行的临空高速目标的探测跟踪能力。由于地球曲率的影响,地基平台的探测概率、预警时间以及雷达资源利用率急剧下降。因而,从提高预警时间考虑,应发展空/天基的雷达探测跟踪平台(由于其不受地球曲率限制。针对马赫数为5,60 km高度的典型临空高速飞行器,8 km高度跟踪平台探测距离最远为1 450 km,相对地基雷达可提高预警时间4 min),实现对临空高速目标的尽早预警;从临空高速目标的全程监视、跟踪方面考虑,应发展新型地基跟踪雷达并拓展其能力,实现临空高速目标的稳定精确跟踪。
3.1.2 红外探测跟踪平台及载荷需求
传统的天基预警装备是针对弹道导弹目标探测设计的,其载荷探测波段、传感器的工作模式、检测算法难以满足对临空高速目标探测跟踪的需要。为满足对临空高速目标的尽早发现和全程覆盖,需要覆盖面积大的高轨卫星实现全球的监视和探测,并补充发展可以覆盖主要威胁方向的跟踪精度高、分辨率高的中低轨卫星星座。需要针对临空高速目标的辐射特性、传感器辐射的波段,发展相对应波段的天基红外/可见光载荷。同时,针对相对应波段传感器的大气吸收特性较差,地面背景噪声大的特点,需解决强变化背景噪声处理技术,去除复杂的背景噪声。
3.2 协同探测跟踪体系结构
为实现空天地多平台传感器的协同观测,必须解决天基(高轨、低轨)、空基和地基平台间的管理、规划、调度、协同与共享机制,把空天地不同传感器资源组成的协同探测跟踪系统,看成是一个资源虚拟化的智能传感器系统,实现对临空高速目标探测事件的智能感知、协同检测、协同信息处理及多传感器系统的最优探测,其工作过程如图7所示。

图7 传感器协同工作流程
为实现对临空高速目标稳定跟踪和准确识别,必须使具有不同能力的多传感器系统协同工作,这种协同包括了不同波段/频段、不同轨道/平台、不同视场/视角的空天地多传感器,通过实时目标感知,实现不同传感器的协同工作。为了保障探测跟踪的连续性以及相邻传感器的交接,协同引导就显得特别重要。
通过充分合理地利用空天地探测跟踪资源,可满足大范围、长期监测与快速响应等临空高速目标探测跟踪需求,为多平台协同探测跟踪提供依据。
4 天基多平台协同探测仿真分析
本文初步对天基多平台协同探测进行仿真。场景设为5颗地球静止轨道卫星(携带红外短波和中波载荷),一个轨道面上有6颗均匀分布的低轨卫星,各有一个扫描相机和凝视相机,卫星轨道高度1 600 km,与地面倾角90°,偏心率0°,升交点赤经190°。扫描型相机红外参数:测量误差σLOS为50μrad,探测速率1 s,视场大小20°×10°,目标容量100。凝视型相机红外参数:测量误差σLOS为10μrad,探测速率30 ms,视场大小0.1°×0.1°,目标容量2。在该方案的假设环境下,通过仿真分析系统对其连续探测的时间和空间性能如图8~图11所示。
(1)系统的静态覆盖能力分析
静态覆盖效果如图8所示,从图8可以看到,由于高轨卫星的存在,全球大部分区域已经实现4重覆盖,绝大部分区域满足2重覆盖,可以满足临空高速目标预警的能力要求。

图8 静态覆盖效果
(2)系统动态覆盖能力初步分析
覆盖百分比报告如图9所示,从图9可以看到,在整场景运行周期内,对全球的覆盖范围超过98%,累积覆盖范围接近100%,基本满足全球监视预警的需要。

图9 覆盖百分比报告
时间满足报告如图10所示,从图10可以看到,在整个场景运行周期内,系统每一时刻对整个覆盖区域中满足两颗星同时看到的栅格相对于整个覆盖区域的百分率超过97.5%。为后续与地基平台协同跟踪提供了支撑。
图10 时间满足报告
从图11可以看到,系统可以在X-51 A的全部飞行时间区域内实现探测跟踪,满足对覆盖区域内临空高速目标探测跟踪的需要。

图11 X-51A的探测起止时间
5 结束语
本文首先分析了临空高速目标的运动、电磁、红外特性,根据其目标特性分析了目前雷达及红外传感器应对这类目标探测跟踪能力的不足,进而提出多平台协同探测跟踪平台与载荷需求,给出了协同探测跟踪工作过程,初步仿真验证天基平台协同的可行性。为下一步反临空高速目标多平台协同探测跟踪系统发展提供支持。
[1]Xue R B,Feng Z,Qi W,et al.Sparse subband imaging of space targets in high-speed motion[J].IEEE Trans.on Geoscience and Remote Sensing,2013,51(7):4144- 4154.
[2]Cai W,Xiong J F,Ting L,et al.Micro-Doppler feature extraction using single-frequency radar for high-speed targets[C]∥Proc.of the IET International Digital Object Identifier Radar Conference,2013:1- 6.
[3]Fiolleau T,Roca R.An algorithm for the detection and tracking of tropical mesoscale convective systems using infrared images from geostationary satellite[J].IEEE Trans.on Geoscience and Remote Sensing,2013,51(7):896- 905.
[4]Barnali G,Gupinath B.Convective cloud detection and tracking from series of infrared images[J].Remote Sensing,2013,41(2):291- 299.
[5]Sun L W,Wang J G.A track initiation algorithm of active and passive location system[J].Modern Defence Technology,2011,39(5):113- 118.(孙立炜,王杰贵.一种有源无源联合定位系统的航迹起始方法[J].现代防御技术,2011,39(5):113- 118.)
[6]Chris B,Baher A,Matthew J.A comparative assessment of multi-sensor data fusion techniques for freeway traffic speed estimation using microsimulation modeling[J].Emerging Technologies,2013,26(1):33- 48
[7]Michele A,Sergio C,Folker W.Sensor data fusion for activity monitoring in the PERSONA ambient assisted living project[J]. Journal of Ambient Intelligence and Humanized Computing,2013,4(1):67- 84.
[8]Wang L D,Zeng Y H.Technology status and development trend for radar detection of hypersonic in near space[J].Journal of Signal Processing,2014,30(1):72- 85.(汪连栋,曾勇虎.临近空间高超声速目标雷达探测技术现状与趋势[J].信号处理,2014,30(1):72- 85.)
[9]Yang J R,Liu Z,Grey F.Observation of high-speed microscale super-lubricity in graphite[J].Physical Review Letters,2013,20(5):266- 276.
[10]Su J,Xing M,Wang G.High-speed multi-target detection with narrowband radar[J].IET Radar Sonar&Navigation,2010,4(4):595- 603.
[11]Quan A J,Sun X D,Zhu L X.A signal detection method for harmonic signal submerged in complex noise background[J]. Applied Mechanics and Materials,2013,9(3):2262- 2265.
[12]Zhao F,Zhou Y,Wang X S.A study on optimal search region of radar under guidance of waring information[J].Modem Radar,2008,30(11):26- 32.(赵锋,周颖,王雪松.预警信息引导条件下雷达最优搜索空域研究[J].现代雷达,2008,30(11):26- 32.)
[13]Fang Z W,Li J S.Study on detection information algorithm and performance analysis[J].Systems Engineering and Electronics,2004,26(4):460- 463.(方展伟,李建勋.检测信息最优融合算法及性能分析[J].系统工程与电子技术,2004,26(4):460- 463.)
[14]Ru X H,Wang C,Li Y.A pulse accumulation-based ML estimation method for chirp rate of LFM pulse[J].Telecommunication Engineering,2012,52(10):1628- 1632.(汝小虎,王聪,李悦.基于脉冲积累的LFM脉冲调制斜率的ML估计方法[J].电讯技术,2012,52(10):1628- 1632.)
[15]Zeng H,Bo H C,Zhu T.X-51A scramjet engine flight and demonstration program[J].Missiles and Space Vehicles,2010:29(1):57- 61.(曾慧,白莟尘,朱涛.X-51A起燃冲压发动机及飞行验证计划[J].导弹与航天运载技术,2010:29(1):57- 61.)
[16]Kang D Y,Cheng B.Differentiation algorithm method of ground-air infrared detection range[J].Electro-optic Technology Application,2009,24(1):29- 33.(康大勇,成斌.地空红外探测距离推算方法讨论[J].光电技术研究,2009,24(1):29 -33.)
[17]Liu Y,He R J,Tan Y J.Modeling the scheduling problem of multi-satellites based on the constraint satisfaction[J].Systems Engineering and Electronics,2004,26(8):1076- 1079.(刘洋,贺仁杰,谭跃进.基于约束满足的多卫星调度模型研究[J].系统工程与电子技术,2004,26(8):1076- 1079.)
Requirements analysis on collaborative detection and tracking of near space high-speed targets
FU Qiang,WANG Gang,GUO Xiang-ke,LIU Chang-yun,ZHANG Xiao-kuan
(School of Air And Missile Defense,Air force Engineering University,Xi’an 710051,China)
Near space high-speed targets with features such as high altitude,high speed,motor ability,radar cross section weak.It is difficult to detect and capture the target only by means of a single or limited detection.By studying on motion,electromagnetic and infrared features of near space high-speed targets,the detection and tracking ability of radar,infrared detection ability is discussed and lack of platform.The multi-platform collaborative detection tracking platform and load requirements,multi-platform collaborative workflow are proposed.Preliminary simulation verifies the cooperative detection capability of space based multi platform.Research can be used as anti near space high-speed targets tracking system development to provide theoretical and technical support.
near space high-speed target;multi-platform cooperative;detection and tracking;requirements analysis
TP391
A
10.3969/j.issn.1001-506X.2015.04.06
付 强(1988-),男,博士研究生,主要研究方向为智能信息处理、多传感器融合。E-mail:fuqiang_66688@163.com
王 刚(1975-),男,教授,博士,主要研究方向为防空反导指控技术、智能任务规划。E-mail:iamwg@sina.com
郭相科(1980-),男,硕士,主要研究方向为机动目标跟踪、多传感器协同跟踪。E-mail:guoxk123@163.com
刘昌云(1978 ),男,博士,主要研究方向为雷达组网、弱小目标跟踪。E-mail:changyunl@163.com
张小宽(1981-),男,博士,主要研究方向为电磁场与微波技术、雷达组网。E-mail:zxkuang@163.com
1001-506X(2015)04-0757-06
2014- 05- 22;
2014- 11- 14;网络优先出版日期:2014- 12- 12。
网络优先出版地址:http://w ww.cnki.net/kcms/detail/11.2422.TN.20141212.0850.003.html
国家自然科学基金(61102109,61272011)资助课题
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
环球时报(2022-05-23)2022-05-23
国际太空(2022年1期)2022-03-09
国际太空(2022年1期)2022-03-09
空间科学学报(2021年2期)2021-07-21
金桥(2021年4期)2021-05-21
房地产导刊(2020年9期)2020-10-28
航天电子对抗(2019年4期)2019-06-02
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25