单相动态电压恢复器复合控制技术
2015-04-06 08:10吴在军窦晓波胡敏强
电工技术学报 2015年17期
施 烨 吴在军 窦晓波 胡敏强 赵 波
(1.东南大学电气工程学院 南京 210096 2.浙江省电力公司电力科学研究院 杭州 310014)
单相动态电压恢复器复合控制技术
施 烨1吴在军1窦晓波1胡敏强1赵 波2
(1.东南大学电气工程学院 南京 210096 2.浙江省电力公司电力科学研究院 杭州 310014)
提出在使用直接电流控制策略对动态电压恢复器(DVR)电流内环基波分量进行前馈的基础上,利用改进型比例谐振(PR)控制器形成电压外环进行反馈控制,从而构成单相DVR的复合控制策略;并提出使用改进型自适应算法提取系统基波矢量,基于无功功率补偿策略的思想,利用矢量运算分别获得电压外环反馈控制参考值与电流内环前馈控制参考值的方法。所提出的复合控制策略能够在增强DVR稳定性的同时显著提高其响应速度,使得DVR能对系统电压基波波动及谐波扰动进行补偿,具备功率因数校正的新功能。最后通过仿真和实验,验证了所提算法的可行性和有效性。
动态电压恢复器 直接电流控制 比例谐振控制 无功补偿 矢量控制
0 引言
随着微电网的蓬勃发展,电网的电压质量问题日益受到关注。微电源接入位置、容量和控制方式的不合理均会直接或间接造成微电网明显的电压波动和闪变,且由于微电源本身的波动性,易造成微电源与本地负荷之间的功率失衡,从而加剧微电网的电压波动,使微电网的电压质量面临重大考验[1,2]。动态电压恢复器(Dynamic Voltage Restorer,DVR)是一种重要的用户电力技术装置(Customer Power Device),能够保护关键负荷免受供电端电压跌落及骤升等电压扰动问题,相比于以往用来维持电能质量的设备[3](如不间断电源(Uninterruptible Power System,UPS)、统一电能质量控制器(Unified Power Quality Conditioner,UPQC)等),DVR在结构、成本、可靠性和快速性等方面都显示出优越性,使其成为治理微电网电压质量的一种有效手段[4]。
习惯将串接在线路中的DVR等效为可控电压源,通过引入电压补偿量达到维持末端电压水平的目的[5]。在设计中,亦可将DVR等效为可控电流源,控制其输出电流与额定电压下负载所需电流相等,同样可维持末端电压,此即动态电压恢复器直接电流控制的基本思路[6]。相比传统控制方法,直接电流控制响应速度快,且方便对故障状态下的短路电流进行限制。
为得出电流参考量,需要实时、准确地获取负载阻抗信息。传统方法是使用电压、电流有效值的比值来反映负载信息[7],但此时缺失负载的无功分量,使得直接电流控制的补偿效果与应用范围受限。本文提出在同步旋转坐标系下,通过矢量构造的方法获取负载阻抗及电压参考值,从而准确获取负载阻抗信息,避免大量使用三角函数运算,减少系统运算量,提高响应速度。
由于隶属前馈控制,直接电流控制的补偿准确度将受到限制,此时仍需依赖电压外环的介入。基于内模原理的比例谐振(Proportional Resonant,PR)控制器,在谐振频率处具有较大增益,而在其他频率处衰减作用强,并可直接在静止参考系中使用,避免繁琐的坐标变换,使算法得到简化,故其是构造单相DVR复合控制系统电压外环的理想形式[8-10]。但PR控制器对于阶跃响应的控制效果不佳。
本文综合利用电压外环反馈控制与直接电流前馈控制构造单相DVR复合控制系统,并利用矢量构造得出无功电流抑制补偿策略的电压参考值算法,使得DVR在满足电压补偿要求的同时达到系统无功补偿的目的,从而提高系统的利用率。首先对DVR进行建模,然后给出基频直接电流控制的理论依据及控制方法,进而利用矢量构造的方法获取无功电流抑制补偿策略的电压参考值与直接电流控制的电流参考值;综合PR电压反馈外环与直接电流控制前馈内环,提出一种单相DVR复合控制策略;最后基于Matlab/Simulink软件和DVR实验平台,通过仿真与实验对所提控制策略的性能进行验证。
1 DVR基本模型
本文所讨论的单相DVR拓扑如图1所示。考虑到在传统结构中,为避免饱和以获取较理想的变压器特性,需要为变压器的铁心留有足够裕量,这样势必会增大DVR装置的体积,提高其成本,故如图1所示,本文采用无串联耦合变压器的DVR结构[11,12]。由图1可知,该装置采用LC滤波器,逆变器输出经滤波电感Lf后,由滤波电容Cf串接至馈线,且在Cf两端设有旁路开关,以备DVR处于故障、待机、检修状态时,维持负荷端的供电。逆变器采用单相全桥结构。直流侧稳压控制涉及整流环节,并假定其可保证直流侧电压的恒定,故在下文分析过程中将逆变器直流侧以恒压源代替。

图1 单相DVR结构图Fig.1 Schematic of single-phase DVR
系统的等效电路如图2所示,利用滤波器模型对DVR进行建模。图中Lf、Cf、Rf分别为滤波电感、电容及电感附加电阻值,本文中忽略滤波电容等效串联电阻;ZL为负载等效阻抗;mVdc为理想逆变器出口脉宽调制电压信号;ug、uL、uDVR分别为网侧、负载侧、DVR补偿电压;if为滤波电抗电流;iL为负载电流;ic为滤波电容分流。图中以箭头标明各电量正方向。

图2 系统等效电路图Fig.2 Equivalent circuit of system
控制系统的数学模型与电流内环反馈点取位有关,对于采用LC滤波的电力电子装置,内环反馈共有3种取位:①滤波电抗电流if;②滤波电容电流ic;③负载端电流iL。取位②虽可提高DVR的动态响应特性和稳定性,但ic与iL无线性关系,且包含较大谐波分量,反馈系数不易选择[13];取位③虽可直接获取iL,但以此构成内环的稳定性较差,控制器较难设计;对取位①在补偿ic后即得iL,以此获取的控制器稳定性较好,且便于装置故障诊断与限流。故本文采用取位①,以此得出的数学模型为
(1)
2 DVR直接电流控制策略

本文对负载电流基频分量进行直接电流控制,采用基频分量矢量运算的方法获取基频导纳y11分量。获取过程阐述为首先利用如图3所示的自适应序分量提取器,快速、准确获取负载电压、电流基频分量的矢量形式[14]。图3中uPLL、u′PLL分别为与网侧电压ug基频分量同相、正交的三角函数形式,由锁相环提供,由此表明本文所进行的矢量运算是在网侧基频相位参考下进行的;LMS为最小均方误差算法[15],以提取负载侧电流基波iLd分量为例,将LMS自适应算法表述为
e(n)=ir(n)-WT(n)X(n)
(2)
W(n+1)=W(n)+2μ(n)e(n)uPLL(n)
(3)
μ(n+1)=αμ(n)+γp2(n)
(4)
p(n+1)=βp(n)+(1-β)e(n)uPLL(n)
(5)

图3 自适应序分量提取器Fig.3 Adaptive electric signal extractor

在式(5)中将LMS算法输入定义为e(n)uPLL(n),在起始阶段由于e(n)中含大量基波成分,e(n)与uPLL(n)具有较强相关性,导致此时算法步长μ被调整得较大,保证算法的快速响应特性;当算法达到稳态时,由于e(n)中的基波成分减少,e(n)与uPLL(n)之间的相关性减弱,在稳态阶段算法步长μ的调整幅度将减小,从而保障序分量提取器的稳态性能。
当系统较长时间处于稳态时,步长μ(n)将降至最小步长μmin。若此时负载电流iL发生突变,受LMS算法响应速度限制,步长μ(n)很难快速上升。此时在算法中引入移相正反馈环节,将输出量的一部分反馈至输入端,从而达到增强波形中基波成分的目的。其中反馈系数Kg一般取小于1的常数,在对移相环节Z-N进行设计时,可同时考虑基波反馈程度与谐波分量的消除。举例说明,若此时系统采样频率为12.8 kHz,则可将移相环节设计为Z-25,以减小5次谐波分量对算法的影响。
在图3所示的自适应序分量提取器的输入端对应输入负载侧电压uL及负载电流iL可分别获得负载侧基频电压矢量(uLd,uLq)及电流矢量(iLd,iLq),从而得出负载侧基频导纳y11为
(6)
(7)
(8)
参考电流提取过程中仅使用了两次除法运算,在DVR补偿范围内除数均为非零实数,从而保证了算法的可实现性,对比传统负载阻抗有效值提取方法,本文所采用的方法能反映各电量之间的相位信息,便于对系统的有功及无功分量进行合理分配。
3 无功功率抑制补偿策略
区别于传统DVR电压补偿的3种控制策略为全相电压补偿法、同相电压补偿法和最小能量补偿法[16],本文提出了无功功率抑制补偿策略。其参考电压确定过程参照相位信息图4进行分析。

图4 DVR电量相位信息图Fig.4 Phase information figure of signal in DVR



(9)
同时,有
(10)

图5 无功电流抑制补偿Fig.5 Reactive current suppressing compensation

(11)
(12)

(13)
由于式(11)与式(12)结构类似,下文仅针对无源负载情形,即uLdiLd+uLqiLq≥0的情况展开叙述,并对算法性能进行验证。
4 复合控制器设计
前馈控制具有稳定性高的优点,但仅采用前馈控制时,系统的控制准确度较差,很难对指令量进行完全跟踪。为进一步提升控制器的整体效能,本文考虑综合利用改进型PR反馈控制,即形如式(19)中Rn控制器以及直接电流前馈控制以形成DVR的复合控制策略。
图6a为单相DVR的复合控制框图,并以虚线框标识出相对独立的控制环节。该控制器采用电流内环、电压外环的双环结构,并附以负载电流前馈控制和滤波电容补偿环节。电流内环采用比例控制,其电流参考值由外环PR控制、负载直接电流前馈、滤波电容分流补偿三部分累加构成。电压外环采用改进型比例谐振控制器的形式。负载电流前馈控制环节中的Gf表示前馈系数,一般可取为1。
图6b为单相DVR参考电压值获取流程图,可见参考电压的获取过程由单相数字锁相环、序分量提取器和补偿策略生成三部分构成。首先由单相数字锁相环锁定网侧电压相位,再通过自适应序分量提取器将负载侧电压、电流转换为d-q轴矢量形式,最后由补偿策略生成环节得到所需的电压参考值。其中单相锁相环的原理描述可参见文献[17],对于序分量提取器和补偿策略生成环节可分别参照第2、3节内容的描述。以下对控制器设计过程进行简要说明。
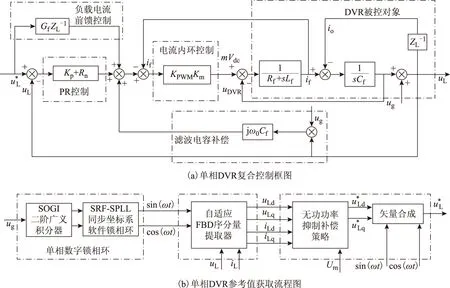
图6 单相DVR控制框图Fig.6 Diagram of control system block
4.1 电流内环控制策略
首先忽略控制延时,采用空间矢量调制方法,对内环比例参数进行设计,将KPWM取为1。因为在空载状态下内环传递函数带宽最窄,且带LC滤波器的逆变电源在空载时有较强的振荡倾向。为保证系统在任何负载条件下都能稳定工作,本文在空载工况下完成对内环参数的整定,此时电流内环传递函数为
(14)
内环截止频率选取为开关频率的约1/5,本文中取为2 kHz,将式(14)中的s以jω代入并在截止频率处,即在ω=12 566 rad/s时,取传递函数Tiref→if模值为0.707 1,得关于内环比例系数Km的方程为
(15)
其中
求解方程(15),可得Km=0.205 4(舍负)。
考察不同性质的线性负载下系统的频域特性,可得系统内环波特图如图7所示。可见此时内环带宽为1.95 kHz,在基频处除电阻型负载的幅值增益为-1.31 dB,电感型负载的相移为12°,其余频域特性均能较好满足跟踪要求,总体而言各类负载在基频处的偏差不大。增大内环比例系数,虽可达到减小静态误差的作用,但随着比例系数的提高,系统的带宽亦会增大,导致控制器对输出纹波的抑制能力减弱,影响输出波形的质量。
此时电流内环的奈奎斯特曲线如图8所示。可见对于3种不同性质的线性负载,电抗型负载的稳定裕度最低。在设计时要特别关注电抗型负载对于系统稳定性的影响。

图7 电流内环波特图Fig.7 Bode plots of inner current loop

图8 电流内环奈奎斯特曲线Fig.8 Nyquist plots of inner current loop
4.2 电压外环控制策略
在空载工况下对电压外环进行设计,由于在PR控制器中,比例系数Kp主要影响系统带宽,谐振系数Kr与截止频率ωc影响系统在谐振频率处的响应特性,两者对系统的影响方式不同[18]。因此,可先将两个参数分开进行分析设计,再利用已获取的控制系数,对系统稳定性进行综合考察。
首先设计比例系数使得系统获得合适控制带宽。将Kr置0,可通过带宽要求完成比例系数Kp的设计。设定带宽为2 kHz,在空载工况下,参照内环比例参数设计方法可得Kp=0.26。
由改进型谐振控制器的时域分析可知,随着截止频率ωc的增大,系统的响应速度加快,但稳定性变差,一般将ωc取为5~15 rad/s之间[19],本文将ωc取为8 rad/s。
然后设计谐振系数Kr以满足系统的基频特性。采用根轨迹的方法确定谐振参数的取值。固定系统的比例系数Kp=0.26及截止频率ωc=8 rad/s,仅改变谐振系数Kr,得到系统根轨迹在主导区域内零极点分布,如图9所示。由图可见,当Kr取值在6~7之间时可得一对距离虚轴最远的共轭极点,从而能更好地满足系统稳定性和响应速度的要求。选取Kr=7。

图9 由Kr变化引起的闭环根轨迹Fig.9 Root locus of poles with changing Kr
最后分别绘制系统关于不同类型负荷的闭环波特图及奈奎斯特曲线,分别如图10及图11所示。可见闭环系统能对基频负荷进行无静差跟踪,但在通带内,波特图并不平坦。对于电感型负荷,低频响应特性不理想;对于电容型负荷,高频响应特性不理想,且带宽降低。由图11可知,对于三类线性负荷,系统稳定,且幅值裕度为无穷大,相位裕度分别为60.7°、49.8°、119.0°。

图10 电压外环波特图Fig.10 Bode plots of outer voltage loop

图11 电压外环奈奎斯特曲线Fig.11 Nyquist plots of outer voltage loop
当系统含较多非线性负载时,为保证负载端供电质量,可考虑采用多次并联谐振控制器的电压外环形式,此时可以LQR优算法完成参数设定[20]。限于篇幅,本文不对此内容展开介绍,且下文的仿真分析和实验验证仅针对线性负载展开研究。
经由本节的设计过程可见,DVR系统对于电感型负载的适应性较差,可通过降低谐振系数Kr来提高系统在感性负载下对扰动量的稳定性,为提供足够大的稳定裕度,本文将Kr重新取值为1。此时对于扰动量,系统稳定性增强,但控制器的调节时间将增长,不满足快速补偿的要求。若使用直接电流控制构成系统基频分量前馈,利用前馈控制的快速补偿特性则可很好的弥补这一缺陷。
4.3 前馈控制策略
在添加负载电流直接前馈控制后,绘制系统闭环传递函数波特图如图12所示。由图可见,此时系统闭环频域特性得到改善,对于三类典型线性负荷,均能获得较平坦的通带特性。在基频处,系统对于突变将获得较快的响应速度。

图12 添加前馈控制后电压外环波特图Fig.12 Bode plots of outer voltage loop with load current feed forward
为提高系统稳定性,内环反馈量取为滤波电抗电流if,但if并不能完全反映线路电流iL,需要对滤波电容分流ic进行补偿。由于前馈控制仅针对基频分量进行,因此本文也仅对ic的基频分量进行补偿。其补偿的具体方法描述如下。
在基频内,利用矢量运算获取ic的基频矢量为

(16)
得出补偿量的时域形式为
(17)
4.4 控制器离散化
为适应数字控制器的使用要求,需要对本文所使用的控制器进行离散化处理。采用预畸变双线性变换对改进型的多并联谐振控制器进行离散化[21]
(18)
式中:ωn为PR控制器谐振角频率;Ts为采样周期。
(19)

表1给出了本文中DVR系统及其控制环节的主要参数取值。

表1 控制环及系统参数确定表
5 仿真分析与实验验证
5.1 仿真分析
为验证本文所采用的自适应序分量提取器的算法效能,参照图3,在Matlab Simulink软件中搭建对应仿真模型,并以文献[22]中的传统自适应算法为对比样本,其序分量提取波形如图13所示。

图13 序分量检测效果对比Fig.13 Comparison the effects of signal extractors
在图13中,3 s时,输入电流iL由60sin(ωt+π/4)A突变为120sin(ωt+π/6)A。图中iLd1、iLq1与iLd2、iLq2分别为使用本文所述自适应序分量提取算法和文献[22]中所述传统自适应算法所得负载电流iL的d-q轴分量。可见本文所述序分量提取算法较之传统算法在响应速度方面具有较大改善,能在一个周波的时间内完成对突变电流的跟踪。
参照图1,亦在Matlab Simulink仿真软件中搭建DVR仿真系统,仿真控制器参数参照表1,采用单相全控整流环节对DVR直流侧电压进行控制,整流与逆变侧均采用单极性三角载波调制,并采用图6所示的无功功率抑制策略获取系统参考电压。由于负载与电源的组合情况较多,本文仅对几种典型工况进行仿真。
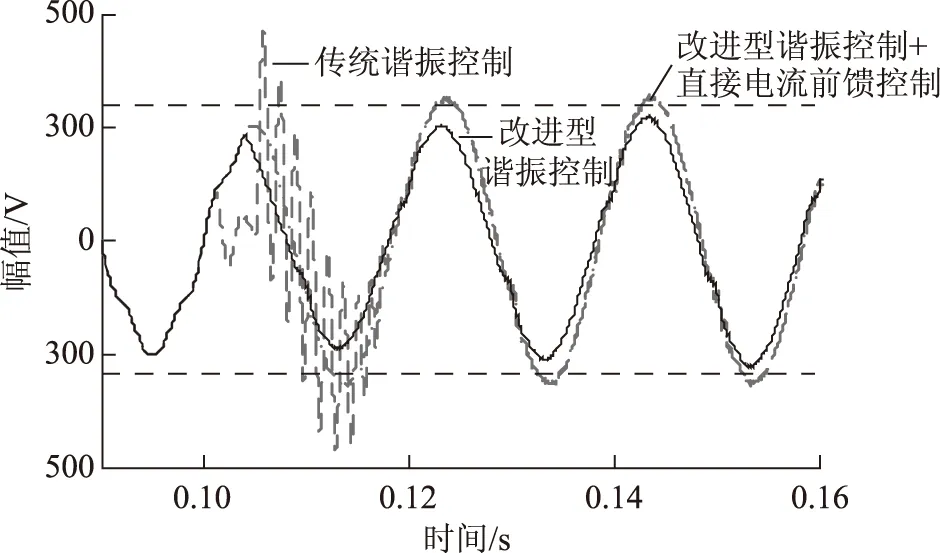
图14 添加前馈控制前后波形对比Fig.14 Voltage waveform comparison with or without feed forward compensation
图14为仅采用Kr=7时的改进型PR控制、仅采用Kr=1时的改进型PR控制及采用本文所述复合控制时,DVR对负载侧电压补偿效果的对比。网侧电压包含240 V的基频分量、20 V的5次谐波分量及6 V的7次谐波分量,负载侧为感性负载,在0.105 s时投入DVR。可见,添加前馈控制前,当Kr取值较大时,负载侧电压发生振荡,但随着跟踪误差的减小,负载侧电压又趋于稳定;在采用较小Kr的改进型PR控制后,负载侧电压虽未发生振荡,但需较长时间才能将负载侧电压补偿至额定值;使用前馈控制后,负载侧电压未发生振荡,且经过不到一个周波的调节时间,即补偿负载侧电压幅值至309.31 V,THD为2.41%。
图15为在0.1 s处,系统侧发生电压突降,且包含谐波电压分量时,DVR的补偿效果。此时系统电压包含280 V的基频分量、20 V的5次谐波分量及6 V的7次谐波分量,THD为7.5%,负载侧的阻值为16 Ω,电抗为40 mH。可见仅需一个周波的调节时间,负载侧电压幅值可达到312.17 V,THD为1.53%,说明DVR具有较快响应速度与较高补偿准确度,且能对网侧谐波电压进行补偿。图15b为补偿前后网侧电压、电流的相位关系,构造补偿前的网侧电流igb,网侧电压相位参考信号Uposr与补偿后的网侧电流igf进行对比。可见对于感性负载,在网侧电压基波相位为-0.7°时采用无功电流抑制补偿策略后,网侧电流由原来的-38.8°变为-1.3°,从而在补偿网侧电压谐波暂降的同时能提高系统的功率因数。

图15 谐波电压源+感性负载补偿效果Fig.15 Compensation result with harmonic voltage source and inductive load
图16为在网侧电压幅值为331 V的DVR补偿状态,0.2 s时,负载由感性切换为容性。由图16a可见,在0.2 s前,感性负载状态下的补偿电压uDVR超前网侧电压ug,此时负载侧电压ul的幅值为312.18 V。当负载侧发生切换时,补偿电压经过两个周波的调节,仍能保证负载侧的正常供电,此时uDVR滞后于ug,负载侧电压ul幅值为309.98 V,对容性负载进行了较好补偿。图16b表示,在感性负载工况下,经过无功功率抑制策略补偿后,当网侧电压相位为0°时,经补偿,将网侧电流的基波相位由-38.9°提升为-1.6°,使得网侧电流的滞后特性得到改善。在负载发生切换后,经过两个周波的调节,网侧电流相位由未补偿前的50.5°转变为-0.5°,使得网侧电流的超前特性得到改善,保障其与电网电压同相,DVR在对网侧电压抬升进行补偿的同时,改善了系统功率因数,并验证了DVR对于负荷突变的适应性。
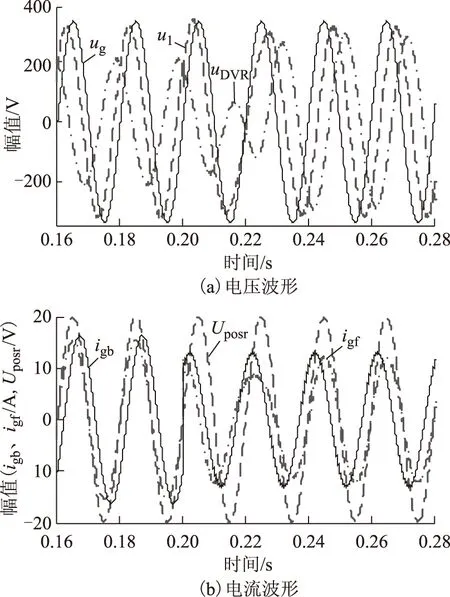
图16 负载切换时补偿效果Fig.16 Compensation result after load switching
上述仿真结果表明,在无功电流抑制补偿策略下,DVR均能保证网侧基波电流与基波电压同相,从而维持网侧功率因数近似为1,且在网侧电压及负载发生突变时均具有较强适应性。
5.2 实验验证
为对本文所提出的直接电流前馈+改进型PR反馈所构成的复合控制策略的实际效果进行验证,在实验室搭建容量为4 kV·A的DVR实验样机,其中系统结构参照图1,参数见表1,IGBT采用三菱CM100DY-34A,数据处理芯片采用TMS320F28335,采样板采用电流霍尔元件HNC-161、电压霍尔元件HNV025A,交流侧电源使用Chroma 61511可编程交流电源进行模拟。
图17为感性负载下,电压跌落至280 V时,采用无功功率抑制的补偿效果。图17a为仅采用Kr=7的PR电压外环时的补偿效果,可见负载为感性且仅采用较大Kr参数的PR外环时,系统的稳定性较差,负载侧电压波形畸变严重。图17b为在PR外环的基础上添加直接电流前馈后系统的补偿效果。此时可保证负载侧电压具有良好稳定性,负载侧电压幅值被补偿至310 V,且使负载侧电流与网侧电压基本同相,达到无功功率抑制的目的。

图17 感性负载下无功功率抑制补偿策略Fig.17 Reactive power compensation strategy encounter inductive load
图18为网侧电压为谐波电压时,DVR的补偿效果。其中ug为通过可编程交流源模拟的网侧电压,设定基波幅值为326 V、5次谐波幅值为20 V、7次谐波幅值为16 V,THD为7.32%;补偿后负载侧电压ul的基波分量幅值为306 V,THD为3.85%;DVR输出补偿电压为uDVR。可见DVR在对电压暂降进行补偿的同时能较好抑制网侧谐波电压。

图18 谐波电压时的补偿效果Fig.18 Compensation effect under harmonic voltage
图19为模拟网侧电压由300 V欠电压状态切换至340 V过电压状态,且伴随有90°相角突变时的补偿效果图。可见在使用直接电流前馈后系统具有较快响应速度,在一个周波内即完成补偿电压的调节,且保证网侧电压与电流基本同相。

图19 网侧电压突变补偿效果Fig.19 Compensation effect under voltage variation
图20为系统在负载突变时的补偿效果。当电压处于幅值为280 V的跌落状态时,负载由30 Ω切换为60 Ω,经过一个基波周期的调节时间,负载侧电压达到稳定。可见系统对于负载突变亦具有较强适应性。

图20 负载突变补偿效果Fig.20 Compensation effect under load variation
上述实验结果表明,在使用直接电流前馈与PR外环反馈的复合控制策略后,系统的响应速度与稳定性较单独采用PR外环得到了提升,对网侧电压暂时、暂降和谐波分量具有抑制作用,且具有提高网侧功率因数的作用,对于网侧电压和负载突变具有较强适应性。
6 结论
1)提出利用直接电流控制的快速补偿特性和电压外环PR反馈控制的精确补偿特性,构成动态电压恢复器的复合控制策略,使系统具有较高补偿准确度的同时,提高系统响应速度,增强系统对不同类型负载的适应性。
2)提出基于同步旋转坐标系中的DVR直接电流控制方法,利用改进型自适应提取算法将电量转换为同步旋转坐标系中的矢量形式,基于无功功率抑制策略,通过矢量运算的方法获取电压外环反馈控制与电流内环前馈控制的参考值,并提出对滤波电容分流进行补偿的方法,以提高算法准确度。
3)提出适应DVR直接电流控制的电压补偿策略,不依赖跌落前电压信息获取参考电压值,且融入无功功率校正技术,扩展DVR的使用范围。
[1] Li Y W,Vilathgamuwa D M,Loh P C.Microgrid power quality enhancement using a three-phase four-wire grid-interfacing compensator[C].Conference Record of the 2004 Industry Applications Conference,39th IAS Annual Meeting,2004,3:1439-1446.
[2] Vilathgamuwa D M,Loh P C,Li Y.Protection of microgrids during utility voltage sags[J].IEEE Transactions on Industrial Electronics,2006,53(5):1427-1436.
[3] 王建伟,胡晓光,陈松松.动态电压恢复器的谐波补偿数字控制技术[J].电工技术学报,2014,29(10):239-245. Wang Jianwei,Hu Xiaoguang,Chen Songsong.Harmonic compensation digital control technology of dynamic voltage restorer[J].Transactions of China Electrotechnical Society,2014,29(10):239-245.
[4] 黄朝霞,邹旭东,童力,等.基于极点配置和重复控制的电流型单相动态电压调节器[J].电工技术学报,2012,27(6):252-260. Huang Zhaoxia,Zou Xudong,Tong li,et al.Research on current control mode single-phase dynamic voltage regulator based on pole-assignment and repetitive control[J].Transactions of China Electrotechnical Society,2012,27(6):252-260.
[5] 刘牛,姚钢,周荔丹,等.基于H∞回路成形的动态电压恢复器鲁棒控制[J].电工技术学报,2012,27(9):48-53. Liu Niu,Yao Gang,Zhou Lidan,et al.H∞loop shaping based robust controller of dynamic voltage restorer[J].Transactions of China Electrotechnical Society,2012,27(9):48-53.
[6] 张允,邹云屏,吴振兴,等.励磁电流补偿方法的电流控制型单相动态电压恢复器的仿真研究[J].中国电机工程学报,2008,28(22):152-158. Zhang Yun,Zou Yunping,Wu Zhenxing,et al.Simulation research of single phase dynamic voltage restorer based on magnetizing current compensation and current control[J].Proceedings of the CSEE,2008,28(22):152-158.
[7] 张允,胡晓磊,邹云屏,等.动态电压恢复器的负载电流直接控制策略[J].电力电子技术,2009,43(5):5-6. Zhang Yun,Hu Xiaolei,Zou Yunping,et al.Load current direct control strategy of dynamic voltage restorer[J].Power Electronics,2009,43(5):5-6.
[8] Kumar G V N,Chowdary D D.DVR with sliding mode control to alleviate voltage sags on a distribution system for three phase short circuit fault[C].IEEE Region 10 and the Third international Conference on Industrial and Information Systems,Kharagpur,2008:1-4.
[9] Zhou H,Wei T Z,Zhao Y L,et al.Study on dynamic matrix predictive control of single-phase DVR[C].Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies,Nanjuing,2008:2136-2140.
[10]Li Y W,Mahinda V D,Blaabjerg F,et al.A robust control scheme for medium-voltage-level DVR implementation[J].IEEE Transactions on Industrial Electronics,2007,54(4):2249-2261.
[11]肖国春,南长合,胡志亮,等.一种串联有源电压质量调节器的移相控制技术[J].中国电机工程学报,2008,28(4):114-122. Xiao Guochun,Nan Changhe,Hu Zhiliang,et al.Phase shift control study for a series active voltage quality regulator[J].Proceedings of the CSEE,2008,28(4):114-122.
[12]胡磊磊,肖国春,滕国飞,等.基于等效基波及奇次谐波谐振器组的单相动态电压恢复器控制[J].中国电机工程学报,2012,32(22):104-112. Hun Leilei,Xiao Guochun,Teng Guofei,et al.An equivalent fundamental and odd harmonic resonators controller for a single-phase dynamic voltage restorer[J]Proceedings of the CSEE,2012,32(22):104-112.
[13]李哲,吴正国,夏立,等.任意负载条件下动态电压恢复器的复合谐振控制策略[J].中国电机工程学报,2013,33(25):130-138. Li Zhe,Wu Zhengguo,Xia Li,et al.Compound resonant control for dynamic voltage restorers under arbitrary load conditions[J].Proceedings of the CSEE,2013,33(25):130-138.
[14]施烨,吴在军,窦晓波,等.基于自适应原理的改进型FBD谐波电流检测算法[J].电网技术,2014,38(4):1051-1058. Shi Ye,Wu Zaijun,Dou Xiaobo,et al.Adaptive theory based improved FBD algorithm for harmonic current detection[J].Power System Technology,2014,38(4):1051-1058.
[15]Jin-gen N I,Feng L I.A novel variable step-size LMS adaptive filtering algorithm[J].Information and electronic engineering,2008,6(1):1-4.
[16]张纪旭,肖国春,陈北海,等.移相控制技术在串联有源电压质量调节器中的应用[J].电工技术学报,2009,24(2):170-177. Zhang Jixu,Xiao Guochun,Chen Beihai,et al.Application of phase shift control for an active voltage quality regulator[J].Transactions of China Electrotechnical Society,2009,24(2):170-177.
[17]王冲,於锋,陈荣.基于广义积分器的电力单相锁相环研究[J].高压电器,2011,47(4):13-16. Wang Chong,Yu Feng,Chen Rong.Study on control strategy for single-phase power phase-locked loop with generalized integrator[J].High Voltage Apparatus,2011,47(4):13-16.
[18]黄伟煌,付勋波,林资旭,等.LC滤波电压源型逆变器闭环控制策略综合对比与设计[J].电力系统自动化,2013,37(19):110-115. Huang Weihuang,Fu Xunbo,Lin Zixu,et al.Generalized analysis and design of closed-loop control strategies for LC-filtered voltage source inverter[J].Automation of Electric Power System,2013,37(19):110-115.
[19]Teodorescu R,Blaabjerg F,Liserre M,et al.Proportional-resonant controllers and filters for grid-connected voltage-source converters[J].IEE Proceedings Electric Power Applications,2006,153(5):750-762.
[20]Hasanzadeh A,Edrington C S,Maghsoudlou B,et al.Multi-loop linear resonant voltage source inverter controller design for distorted loads using the linear quadratic regulator method[J].IET Power Electronics,2012,5(6):841-851.
[21]Yang Y,Zhou K,Cheng M,et al.Phase compensation multiresonant control of CVCF PWM converters[J].IEEE Transactions on Power Electronics,2013,28(8):3923-3930.
[22]李辉,吴正国,邹云屏,等.变步长自适应算法在有源滤波器谐波检测中的应用[J].中国电机工程学报,2006,26(9):99-103. Li Hui,Wu Zhengguo,Zou Yunping,et al.A variable step size adaptive algorithm applied to harmonic detection of active filter[J].Proceedings of the CSEE,2006,26(9):99-103.
Study on Compound Control Technology of Single-phase Dynamic Voltage Restorer
ShiYe1WuZaijun1DouXiaobo1HuMinqiang1ZhaoBo2
(1.School of Electrical Engineering Southeast University Nanjing 210096 China 2.Zhejiang Electric Power Corporation Research Institute Hangzhou 310014 China)
In this paper,a novel composite control strategy is proposed,which contains the load current direct feedforward control strategy for the inner loop and the improved proportional resonant (PR) feedback control strategy for the outer loop.The fundamental voltage and current vectors are extracted by an improved adaptive algorithm.Then the reference values of the voltage loop and the current loop are got via vector calculation based on the reactive power compensation strategy.In this way,the suggested compound control technology can enhance the stability and fasten the responding speed at the same time for the dynamic voltage restorer (DVR) and make it suitable for compensating fundamental and harmonic frequency fluctuation and has the ability of power factor correction.The feasibility and effectiveness of the proposed algorithm are verified by the simulation and the experimental results.
Dynamic voltage restorer,load current direct control strategy,proportion resonant,reactive power compensation,vector control strategy
国家自然科学基金(51177015,51307023)、新世纪优秀人才支持计划(NCET-13-0129)、国家高技术研究发展(863)计划(2014AA052002)和国家电网公司项目(5211011400AX)资助。
2014-12-22 改稿日期2015-06-10
TM464
施 烨 男,1988年生,博士研究生,研究方向为分布式发电与微网、电能质量分析与控制。(通信作者)
吴在军 男,1975年生,博士,教授,博士生导师,研究方向为变电站自动化、分布式发电与微网、电能质量分析与控制。
猜你喜欢
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27
山东交通科技(2020年2期)2020-08-13
广东医科大学学报(2020年6期)2020-02-06
中国微创外科杂志(2018年9期)2018-10-09
通信电源技术(2018年5期)2018-08-23
电子制作(2017年20期)2017-04-26
电力系统及其自动化学报(2016年5期)2016-12-01
腹腔镜外科杂志(2016年12期)2016-06-01
腹腔镜外科杂志(2016年11期)2016-06-01