非最小相位水轮机系统的预测PI控制
2014-11-09 01:22韩光信乔元静刘艳玲
吉林化工学院学报 2014年5期
韩光信,乔元静,刘艳玲
(1.吉林化工学院信息与控制工程学院,吉林 吉林 132022;2.吉林绰丰柳机内燃机有限公司 采购部,吉林 吉林132002;3.国网吉林省电力有限公司四平供电公司经济技术研究所,吉林四平136000)
非最小相位系统是指右半平面包含零极点的系统,在生产实践中具有广泛的工程应用背景[1].该类系统的鲜明特点是具有负调现象,即若传递函数包含奇数个右半平面零点,则系统受到激励作用后,输出值先朝着目标值的反向运动,然后才逐渐趋近于目标值.在实际应用中,负调会严重影响系统的平稳运行[2].从理论上来说,消除负调的最佳方法就是通过零极点对消将右半平面的零点抵消掉,但是也由此在控制器中引入不稳定极点,导致实际不可行,因此人们想设法来减小负调,难点在于负调和调节时间是相互制约的,抑制负调的同时会延长调节时间[3].水轮机是具有广泛工程背景的非最小相位系统[4],其动态特性较为复杂.传统的PID控制对包括水轮机在内的非最小相位系统达不到理想的性能,通过某种优化方法来整定参数[5-6]或者非线性 PID[7]能够达到一定的效果.为了进一步提高控制性能,诸如自适应控制[2]、自抗扰控制[8]、变结构控制[9]、内模控制[10]等复杂控制策略也都运用于水轮机系统的控制.本文从工程实际出发,提出了水轮机系统的预测PI控制策略,利用其估计功能来该系统负调和调节时间相互制约的矛盾,针对不同工况的仿真实验表明该控制策略在保证调节时间基本一致的前提下,能够同时减小负调和超调,而且具有良好的鲁棒性能.
1 水轮机动态特性描述
水轮机发电机组是典型的非最小相位系统,主要由引水系统、水轮机、执行机构、电网(负荷)等几部分组成,图1所示为其控制系统结构图.

图1 水轮机系统示意图
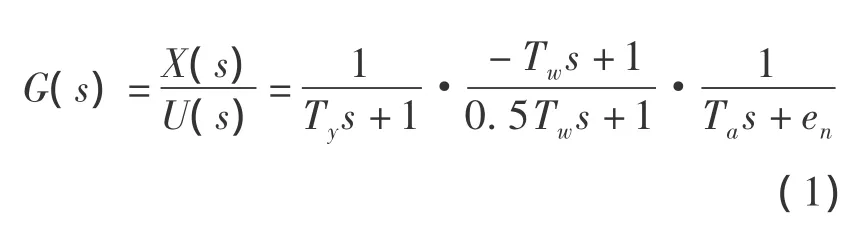
图1中符号的含义分别是:x为机组转速;u为控制输入;y为接力器行程;mt为水轮机输出力矩,mg为扰动或负载.考虑引水系统、发电机、电液随动系统及负载的动态特性,将系统进行线性化处理,可得水轮机系统的传递函数(令mg=0)为[4]:Ty,Ta,Tw分别为接力器、机组、引水道的惯性时间常数,en为水轮机组特性系数.显然传递函数中包含一个右半平面零点.
2 预测PI控制
在过程控制领域中,PID控制器一直是占主导地位的控制算法,具有结构简单、鲁棒性强的特点.该算法有3个可调节的参数,多年来工程技术人员根据经验提出了多种参数整定方法,当被控对象参数变化时只需重新整定参数即可达到令人满意的效果.但是PID控制对某些特殊对象却无法取得期望的控制性能.针对大纯滞后对象,文献[11]阐述了一种新型预测PI控制器,其算法公式为:显然具有标准PI控制器的结构,而可以解释为:t时刻的输出预测值是基于时间段(t-L,t)的控制作用的,消除控制作用的盲目性,可以克服大纯滞后对控制的不利影响.

实际上,可以将纯滞后看作系统的某种不确定性,而负调是比纯滞后更大范围的不确定性,或者说,反向特性本质上就是忽略了高频特性的纯滞后,由此利用预测PI控制较强的鲁棒性就能够更好地协调负调、超调和调节时间之间的矛盾,改善非最小相位系统的控制效果.图2所示为水轮机系统的反馈控制方案,虚线框内为预测PI控制器的结构.

图2 水轮机预测PI控制方案
现代控制装置可容易地实现预测PI算法,第一部分Gc1(s)为标准的PI控制,第二部分Gc2(s)利用移位寄存器即可方便地操作.
3 仿真结果
为了验证所提出控制策略的有效性,针对三种具有明显差异的工况进行了仿真实验.其运行参数分别如下,工况1:Ty=0.2,Tw=0.8,Ta=0.2,en=0.2;工况 2:Ty=0.0,Tw=0.8,Ta=0.2,en=0.2;工况 3:Ty=0.3,Tw=0.8,Ta=0.96,en=0.2.预测 PI控制器参数取为:K=0.1,Ti=10,L=10,并与传统的Z-N方法设计的PID控制器加以比较.仿真曲线如图3~图5所示,其中虚线表示传统PID,实线表示预测PI控制,容易看出,即便是工况发生变化的情况下,预测PI控制也能在保证调节时间基本一致的前提下,同时减小负调和超调,达到了良好的调节效果.
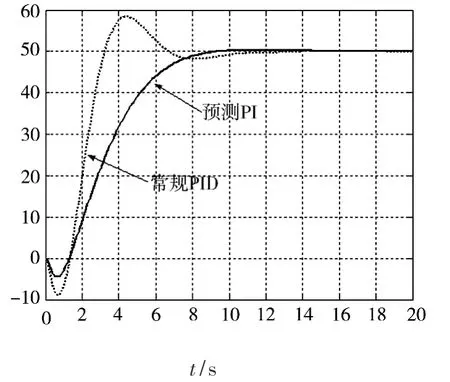
图3 工况1水轮机响应曲线图

图4 工况2水轮机响应曲线

图5 工况3水轮机响应曲线
4 结 论
本文以具有广泛应用背景的水轮机系统为对象,研究了非最小相位系统的预测PI控制策略,针对不同工况的仿真实验表明该控制策略在保证调节时间基本一致的前提下,能够同时减小负调和超调,而且具有良好的鲁棒性能.该控制算法简单,容易实现,便于工程应用.
[1] 富月,柴天佑.一类非线性非最小相位系统的直接自适应控制[J].控制理论与应用,2006,23(6):886-890.
[2] 杨巧德,张侃建.非最小相位系统的自适应逆控制[J].大电机技术,2010(4):61-65.
[3] 何真,陆宇平,郑成军.一种新的非最小相位系统的控制方法[J].信息与控制,2006,35(5):560-563.
[4] 沈祖诒.水轮机调节[M].3版.北京:中国水利水电出版社,2011.
[5] 王凌,李文峰,郑大忠.非最小相位系统控制器的优化设计[J].自动化学报,2003,29(1):135-140.
[6] 王介生,王金城,王伟.基于粒子群算法的PID控制器参数自整定[J].控制与决策,2005,20(1):73-76.
[7] 孟香.一种非最小相位系统控制方法[J].太原科技大学学报,2012,33(2):110-112.
[8] 王涛,杨晓萍,余向阳,等.基于神经网络的水轮机调节系统自抗扰控制[J].水力发电学报,2006,24(3):125-129.
[9] 孙保良,邢福成.基于滑模变结构的一类非最相位系统控制[J].海军航空工程学院学报,2011,26(2):141-143.
[10]宋晓燕,王泳.基于内模设计法的非最小相位系统控制[J].平顶山学院学报,2007,22(2):77-80.
[11]邵惠鹤,任正云.预测PID控制算法的基本原理及研究现状[J].世界仪表与自动化,2004,8(6):17-22.
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2021年3期)2021-07-16
装备制造技术(2020年4期)2020-12-25
考试与评价·高一版(2020年4期)2020-11-12
学生天地(2020年31期)2020-06-01
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
学生天地(2019年30期)2019-08-25
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04