非自治离散动力系统的渐近稳定集
2014-10-09 01:19孙彩贤
四川师范大学学报(自然科学版) 2014年4期
刘 磊, 孙彩贤
(1.商丘师范学院 数学与信息科学学院,河南 商丘476000; 2.河南工业大学 理学院,河南 郑州450001)
本文中N表示正整数集.记Z+=N∪{0}.设X为一个拓扑空间,fn:X→X(n∈N)为一个连续映射,f1,∞表示序列(f1,f2,…,fn,…).(X,f1,∞)称为一个非自治离散动力系统[1].如果X是紧致空间,则称(X,f1,∞)为一个紧致非自治离散动力系统.定义

以及是X上的单位映射.特别地,当f1,∞是一个常序列(f,…,f,…),则(X,f1,∞)就是经典的离散动力系统(自治离散动力系统)(X,f).定义x∈X在f1,∞下的轨道为

它的长期动力系统行为由它的极限集决定.
在过去的十几年间,大量的文章研究专注于非自治离散动力系统的各种动力学性质.S.Kolyada等[1]给出了非自治离散动力系统的拓扑熵定义,S.Kolyada[2]讨论了非自治离散动力系统的极小集的性质,R.Kempf[3]和 J.S.Canovas[4]研究了非自治离散动力系统的ω-极限集.W.Krabs[5]研究了非自治离散动力系统的稳定性.文献[6-7]讨论了非自治离散动力系统的拓扑压和原像熵,Y.Shi等[8]以及P.Oprocha等[9]分别讨论了非自治离散动力系统的混沌问题.最近,文献[10]研究了一类非自治离散动力系统的Li-Yorke混沌以及文献[11]讨论了非自治离散动力系统的初值敏感性.
L.S.Block等[12]介绍了经典动力系统(自治离散系统)的渐近稳定集概念,R.A.Mimna等[13]讨论了半同胚的ω-极限集和渐近稳定集,P.Oprocha[14]研究了连续动力系统的渐近稳定集.本文给出了非自治离散动力系统的ω-极限集和渐近稳定集.目的是研究非自治离散动力系统渐近稳定集的性质.特别地,给出了一个非自治离散系统有渐近稳定集的一些充分条件.
1 基本理论
定义1.1设(X,f1,∞)为一个非自治离散动力系统.对每一个 x∈X 和 m∈Z+,γm(x,f1,∞) =称为从时间m开始通过x的轨道.如果m=0,将忽略时间指标.
定义1.2设(X,f1,∞)为一个非自治离散动力系统以及 x∈X.定义 ω(x,f1,∞)为轨道 γ(x,f1,∞)的极限点构成的集合,即ω(x,f1,∞)=,这里是 γm(x,f1,∞)的闭包.
定义 1.3[2]设(X,f1,∞)为一个非自治离散动力系统.A⊆X称为不变集,如果对每一个n∈N,有
对自治离散系统(X,f),由文献[12],如果 X是紧的,则对每一个x∈X,ω(x,f)是不变的.但是,对一个非自治离散动力系统(X,f1,∞),对某一个x∈X,ω(x,f1,∞)可能不是不变的.给出如下的例子[3]表明 ω(x,f1,∞)不是不变的.
例 1.1设X =[0,1],fn:[0,1]→[0,1]为一个连续映射序列,以及对每一个n∈N,
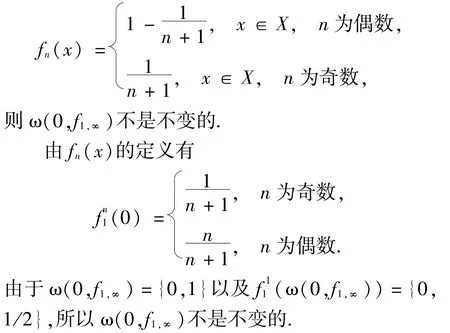
定义1.4设(X,f1,∞)为一个非自治离散动力系统.f1,∞称为k-周期离散系统,如果存在k∈N使得对每一个 x∈X 和 n∈N,有 fn+k(x) =fn(x).
设(X,f1,∞)为一个k-周期离散系统(k∈N).定义 g =:fk◦fk-1◦… ◦f1,称(X,g)是由 k-周期离散系统(X,f1,∞)诱导的自治离散系统.
定义 1.5[15]设 X 为一个拓扑空间和{Yi}i∈I为 X 的子集构成的族.则族{Yi}i∈I具有有限交性质,如果对I的每一个有限子集J,是一个非空集合.
定理1.1[15]设X为一个度量空间,K是X的一个紧子集和C为X的一个闭子集且K∩C=Ø.则存在X的2个开集U和V,使得K⊆U,C⊆V以及U∩V=Ø.
2 非自治离散动力系统的渐近稳定集




[1] Kolyada S,Snoha L.Topological entropy of nonautonomous dynamical systems[J].Random Comput Dynam,1996,4:205-233.
[2] Kolyada S,Snoha L,Trofimchuk S.On minimality of nonautonomous dynamical systems[J].Nonlinear Oscil,2004,7:83-89.
[3] Kempf R.On Ω-limit sets of discrete-time dynamical systems[J].J Difference Equ Appl,2002,8:1121-1131.
[4] Canovas J S.On ω-limit sets of non-autonomous discrete systems[J].J Difference Equ Appl,2006,12:95-100.
[5] Krabs W.Stability and controllability in non-autonomous time-discrete dynamical systems[J].J Difference Equ Appl,2002,8:1107-1118.
[6] Huang X,Wen X,Zeng F.Topological pressure of nonautonomous dynamical systems[J].Nonlinear Dynam Sys Theory,2008,8:43-48.
[7] Huang X,Wen X,Zeng F.Pre-image entropy of nonautonomous dynamical systems[J].J Syst Sci Complexity,2008,21:441-445.
[8] Shi Y,Chen G.Chaos of time-varying discrete dynamical systems[J].J Difference Equ Appl,2009,15:429-449.
[9] Oprocha P,Wilczynski P.Chaos in nonautonomous dynamical systems[J].An St Ovidius Constanta,2009,17:209-221.
[10] Wu X,Zhu P.Chaos in a class of non-autonomous discrete systems[J].Appl Math Letters,2013,26:431-436.
[11] Li R.A note on uniform convergence and transitivity[J].Chaos,Solitons& Fractals,2012,45:759-764.
[12] Block L S,Coppel W A.Dynamics in one dimension[C]//Lecture Notes in Math,1513.Berlin:Springer-Verlag,1992.
[13] Mimna R A,Steele T H.Asymptotically stable sets for semi-homeomorphisms[J].Nonlinear Anal,2004,59:849-855.
[14]Oprocha P.Topological approach to chain recurrence in continuous dynamical systems [J].Opuscula Math,2005,25:261-268.
[15] Engelking R.General Topology[M].Warszawa:PWN,1977.
猜你喜欢
商丘师范学院学报(2022年11期)2022-12-08
商丘师范学院学报(2022年10期)2022-10-26
安庆师范大学学报(自然科学版)(2021年1期)2021-11-28
儿童故事画报(2021年11期)2021-01-23
人大建设(2020年5期)2020-09-25
阜阳师范大学学报(自然科学版)(2020年3期)2020-08-13
南京大学学报(数学半年刊)(2020年1期)2020-03-19
数学物理学报(2017年5期)2017-11-23
都市丽人(2015年4期)2015-03-20
高等建筑教育(2014年3期)2014-07-31