基于UKF的陀螺故障预报方法
2014-08-09 22:19董云峰
航天控制 2014年3期
田 露 董云峰
北京航空航天大学宇航学院,北京100191
基于UKF的陀螺故障预报方法
田 露 董云峰
北京航空航天大学宇航学院,北京100191

针对陀螺漂移增大这种渐变故障,提出了一种UKF(Unscented Kalman Filtering)结合姿态运动学方程进行角速率估计,从而进行陀螺故障预报的方法。用四元数表示姿态运动学方程,以卫星姿态角和陀螺角速率为状态量,太阳敏感器和地球敏感器确定的姿态角为观测量,创建了UKF滤波器模型。根据估计角速率与陀螺测量值产生的残差序列,提出陀螺故障预报方法。避免了动力学方程受星体惯量和控制力矩影响产生的误差以及EKF,PF滤波算法的不足。在MATLAB环境中进行了仿真,仿真结果表明,该算法可以及时准确的预报陀螺漂移增大故障,模型简单,易于构建,计算量小,具有很好的工程实用性。
陀螺故障预报;陀螺漂移;姿态运动学方程;UKF
大部分故障在造成严重影响之前存在一个缓变恶化过程,故障诊断技术在监控量超出正常操作区域之后才报警,此时故障已达到一定规模。如果能在故障发生初期发现故障,采取措施将故障消灭在萌芽状态,将会减小甚至避免故障对整个过程造成损害。因此,过程故障预报技术成为故障诊断领域新的研究热点[1]。陀螺作为航天器装备的重要敏感器之一,研究其故障预报技术很有必要。
陀螺故障是指由于陀螺电机、力矩器、传感器故障或控制线路失效,导致陀螺漂移增大、输出常零和陀螺数据不变化等[2]。对于陀螺漂移增大这种渐变故障,可以通过故障预报,及时采取措施来防止故障的发生。
在故障预报领域,基于时间序列预测的方法是目前研究最多的领域,包括经典时间序列分析法、灰色模型法、神经网络法、滤波方法。经典时间序列分析法是用线性模型拟合数据序列,当系统为非线性时,这种方法不适用。灰色系统模型实质上是用指数函数去逼近一个经过累加处理后的时间序列,仅能描述一个随时间按指数规律变化的过程。神经网络的结构不易确定, 而且它的值域受训练样本集合的限制。当系统物理模型已知时, 基于滤波器的故障预报方法能够很好地跟踪系统变化的趋势, 预报的结果较为准确[1]。针对陀螺的渐变故障,物理模型已知,因此选用滤波方法进行故障预报。
基于滤波器的方法通过估计角速率与陀螺测量值产生一个残差序列,利用残差的幅值变化趋势进行故障预报。通常采用滤波算法结合动力学方程得到估计角速率。此法由于动力学方程受限于星体的惯量,在卫星运营期间采取反作用轮或推力器进行姿态保持,星体惯量会发生改变,并存在控制力矩,因此估计角速率就会出现偏差,导致诊断错误。姿态测量中包含非线性问题,非线性滤波器主要有EKF,UKF、和PF,文献[3]提出采用EKF进行姿态估计存在2个不足:1)并不是所有的非线性函数都可以线性化为合适的形式,因此对不同系统的线性化存在一定难度;2)在滤波过程中要考虑线性化过程中的约束条件,否则可能引起发散。文献[4]提出粒子滤波的实时性较低。UKF不需要对非线性方程线性化,无需计算雅克比矩阵,也能达到二阶泰勒展开的精度,采取确定性采样,避免了PF中粒子退化的问题。
因此,本文提出一种UKF结合姿态运动学方程进行角速率估计,从而进行陀螺故障预报的方法。
1 姿态运动学方程


(1)
(2)
在运算过程中始终保持四元数的归一化。
2 UKF陀螺故障预报的实现
2.1 UKF滤波器设计
建立系统的状态方程,取状态变量:X=[A,Wb]T。其中A为3个姿态角,Wb为陀螺角速度。
把A转换成姿态四元数Q,则X′=[Q,Wb]T,状态方程如下:
(3)
χk|k-1=f(χk-1)一步预测过程通过四阶龙格库塔法获得。
建立系统的观测方程,取观测变量:Y=[A]T。这里A为太阳敏感器和地球敏感器确定的3个姿态角,则观测方程为:

(4)
2.2 UKF滤波算法流程
UKF算法的具体流程如下。
1) 状态参数初始化
设定初始状态向量X0及协方差矩阵P0,同时给出系统噪声和量测噪声的方差矩阵Q和R。

χk-1=
(5)


2) 时间更新
将各个Sigma点分别通过χk|k-1=f(χk-1)进行一步预测,由式(6)和(7)计算一步预测后,各个Sigma点的加权平均值和方差为
(6)
(7)
将这些Sigma点分别通过非线性传递函数作非线性变换,得到变换后的各个Sigma点为:
Yk|k-1=h(χk|k-1)
(8)
由式(9)和(10)计算Y各个Sigma点的加权平均值和方差为
(9)
(10)
3) 测量更新
(11)
进而由式(12)计算得到增益矩阵Kk,
(12)
由式(13)和(14)更新状态量和方差,作为下次的滤波初值
(13)
(14)
2.3 故障预报方法
由式(13)估计的角速率和陀螺测得的角速率可以构成星体角速度的残差序列[7]:
(15)
当陀螺正常工作时,残差的幅值极小,可认为只包含陀螺的测量噪声项。当陀螺出现渐变故障后,残差的幅值逐渐增大,此时采用残差加权平方和故障检测方法,第k+1时刻陀螺故障检测判别函数值如下:
(16)
其中,N为人为选定的数据窗长度,N取值较小时,有助于对故障的快速检测,但有可能增大误报率;反之,当N取值过大时,将不利于对故障的快速检测[7]。
故障检测函数为:L(k+1)>ε0时表示将发生故障。
为保证误报率和漏报率,阈值ε0参考陀螺无故障时的残差值确定[7]。
3 仿真实验
为了验证上述方法的有效性,分别对陀螺工作正常和漂移逐渐增大这2种情况进行了仿真和对比分析。
1) 情况1:Y轴陀螺正常工作。
卫星正常工作时,用UKF滤波预测得到的角速度与陀螺测得的角速度如图1,相应的残差如图2,可以看出卫星正常工作时,UKF估计的角速度值与陀螺测得的角速度值基本吻合,陀螺的残差幅值很小且变化平稳。

图1 情况1估计角速度与测量角速度对比
2) 情况2:Y轴陀螺常值漂移逐渐增大。

图2 情况1陀螺诊断曲线
Y轴陀螺输出角速度漂移增大时,用UKF滤波估计得到的角速度与陀螺测得的角速度对比如图3,相应的残差如图4,对比卫星正常工作时的效果图,可以看出200s时,Y轴陀螺测得的角速度与UKF估计得到的角速度开始出现分离,相应的残差幅值也开始增大。可以有效诊断出200s时Y轴陀螺发生渐变故障。
参考正常工作时的残差曲线,阈值ε0取为0.5×10-8,可以预测在300s时渐变故障的残差会到达门限值,有100s的时间来采取措施防止故障的发生。
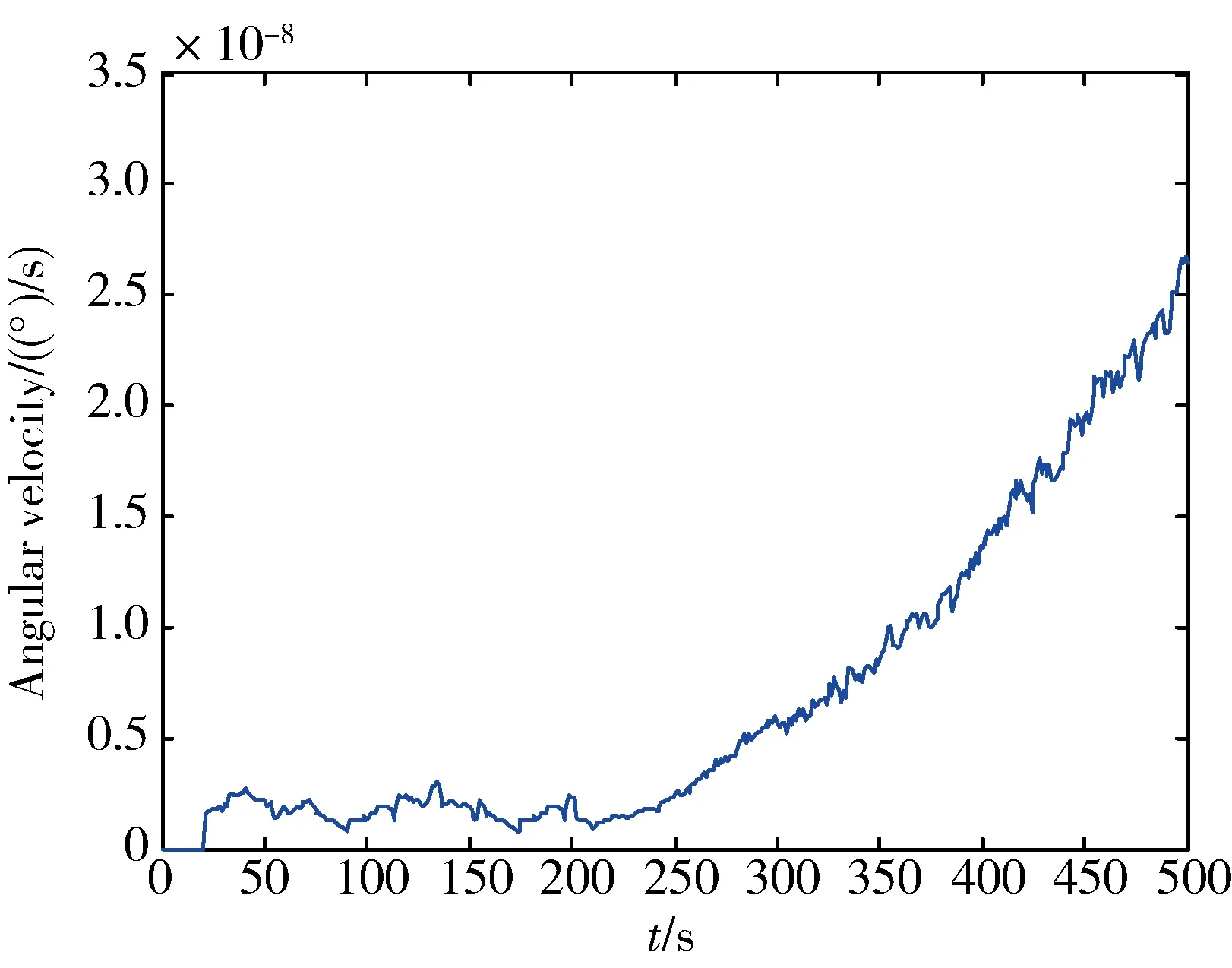
图4 情况2陀螺诊断曲线
4 结论
提出了一种UKF结合姿态运动学方程进行角速率估计,从而进行陀螺故障预报的方法,避免了动力学方程受星体惯量限制和存在控制力矩导致的误差以及EKF,PF滤波算法的不足。建立了姿态运动学方程和滤波器模型,提出陀螺故障预报方法,进行了MATLAB仿真。仿真结果表明,此法可以很及时准确的预报陀螺漂移增大故障,且模型简单易于建立,计算量小,具有很好的工程实用性。
[1] 陈敏泽,周东华.动态系统的故障预报技术[J].控制理论与应用,2003,20(3):819-823.(Chen M Z, Zhou D H. Fault Prediction Techniques for Dynamic Systems [J].Control Theory and Applications, 2003,20(3) :819-823.)
[2] 莫鑫,李一冰,宋利芳.卫星姿轨控分系统故障模式测试方法研究[R].北京:第二十二届全国空间探测学术讨论会论文,2009.(Mo X, Li Y B, Song L F. Study on Failure Matter Test of Attitude and Orbit Control System [R]. Beijing: the 22thConference of National Space Exploration, 2009.)
[3] 刘星,赵黎平,赵光恒.UKF与EKF在卫星姿态估计应用中的比较[J].计算机仿真,2008,25(3):48-51.(Liu X, Zhao L P, Zhao G H. Comparison of Unscented Kalman Filtering and Extend Kalman Filtering for Satellite Attitude Estimation [J]. Computer simulation, 2008,25 (3) :48-51.)
[4] He W B, Liu S R, LI W L.Nonlinear Fliter Based Fault Diagnosis in Nonlinear Stochastic Systerms [C].Harbin:Proceedings of the 25thChinese Control Conference,2006.
[5] 张云,王培垣.基于星敏感器角速度估计的陀螺故障诊断[J].航天控制,2004,22(3):93-96.(Zhang Y, Wang P Y. Fault Diagnosis of Gyroscope Based on Estimated Angular Rate Using Star Sensor [J]. Aerospace Control, 2004,22 (3) :93-96.)
[6] 卢舒勃.民用飞机导航传感器滤波算法研究[D].上海:上海交通大学,2011.(Lu S B. Research of Filter Algorithm for the Civil Aircraft Navigation Sensors [D]. Shanghai: Shanghai Jiao Tong University, 2011.)
[7] 邢琰,魏春岭.基于四元数估计角速率的陀螺故障定位[J].宇航学报,2003,24(4):410-413(Xing Y, Wei C L. Fault Location of Single Redundant Gyroscopes Based on Estimated Angular Rate Using Quaternion [J].Journal of Astronautics, 2003,24 (4) :410-413.).
[8] 王立峰,杨慧,王金刚.星上惯性姿态敏感器故障诊断方法评述[J].航天器工程,2009,18(3):104-108.(Wang L F, Yang H, Wang J G. An Overview of Fault Diagnosis Methods for Inertial Sensing Device on Spacecraft [J].Spacecraft Engineering, 2009,18(3):104-108.)
[9] 张云,王培垣.基于星体角速度估计的陀螺故障诊断[J].上海航天,2005(3):22-25.(Zhang Y, Wang P Y. Fault Diagnosis of Gyroscope Based on Estimated Angular Rate [J]. Shanghai Aerospace, 2005 (3) :22-25.)
[10] Xue L, Yuan W Z, Chang H L, Qin W, Yuan G M, Jiang C Y.Application of Quaternion-Based Extended Kalman Filter for MAV Attitude Estimation Using MEMS Sensors[J].Nanotechnology and Precision Engineering,2009,7(2):163-167.
[11] 廖鹤,王本利,曹正礼.用于无陀螺卫星姿态确定的预测UKF 算法[J].南京理工大学学报,2011,35(5):687-692.(Liao H, Wang B L, Cao Z L. Predictive Unscented Kalman Filter for Gyroless Satellite Attitude Determination [J]. Journal of Nanjing University of Science and Technolog, 2011,35(5):687-692.)
Gyro Fault Prediction Algorithm Based on UKF
TIAN Lu DONG Yunfeng
School of Astronautics, Beijing University of Aeronautics and Astronautics, Beijing 100094, China
Aimingatthegradientfailureofthegyrodriftincreasing,analgorithmbasedonestimatingtheangularrateaccordingtotheUKFandattitudekinematicequationforgyrofaultpredictionispresentedinthepaper.TheUKFfiltermodelisestablishedwiththeattitudekinematicsequationdescribedbyquaternion.Thestatevariablesofthemodelarethesatelliteattitudeangleandthegyroangularrate,andtheobservedvariablesaretheattitudeanglebasedonsunsensorandearthsensor.Accordingtotheresidualsoftheestimatedangularrateandgyromeasurementvalues,thegyrofailurepredictionmethodispresented.Theerrorcausedbykineticequationcanbeavoided,whichcanbelimitedbythespacecraftinertialandcontrolmomentandtheshortageoftheEKFandthePF.Thesimulationsystemisdeveloped.Theresultsshowthatthealgorithmcanpredictthegradientfailureofthegyrodriftincreasingtimelyandaccurately,anditiseasytobuildwithlesscalculationandhasgoodengineeringpracticability.
Gyrofaultprediction;Driftincreasing;Attitudekinematicequation; UKF
2012-10-16
田 露(1991-),女,山西沁县人,硕士研究生,主要研究方向为飞行器设计;董云峰(1965-),男,北京人,教授,博士生导师,主要研究方向为卫星动态模拟技术。
V448.21
A
1006-3242(2014)03-0076-05
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
北京航空航天大学学报(2020年10期)2020-11-14
小学生学习指导(低年级)(2019年10期)2019-10-16
自动化学报(2019年6期)2019-07-23
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21