
地震模拟振动台三参量控制参数整定技术的研究
2014-04-02 02:44栾强利陈章位徐进荣贺惠农
振动工程学报 2014年3期
栾强利, 陈章位, 徐进荣, 贺惠农
(1.浙江大学流体动力与机电系统国家重点实验室, 浙江 杭州 310027;2.杭州亿恒科技有限公司, 浙江 杭州 310015)
引 言
地震模拟振动台能够在实验室中模拟试件的真实振动环境,实现对试件的抗振能力测试,其使用频率低,承载能力强,因而广泛应用于土木、车辆、航空航天等领域[1~4]。地震模拟振动台伺服控制器采用三参量控制技术,三参量控制技术充分考虑了地震模拟振动台的位移、速度和加速度等信号,设置了三参量反馈、三参量前馈以及信号发生器等环节,从而有效改善了模拟振动台的系统传递特性。其中,三参量反馈能够有效扩展系统的频率范围,增加系统的阻尼,三参量前馈通过对消系统传递函数中距离虚轴较近的极点,实现系统频宽进一步扩展的目的,信号发生器主要用于控制信号的生成,包括位移、速度及加速度信号[5~9]。
三参量控制参数较多,主要参数包括系统前馈增益及反馈增益参数。三参量控制参数整定常通过参数试凑法,即通过逐个调整三参量控制参数,并从中选择对系统控制效果较好的一组参数,实现三参量控制参数的整定。这种方法不仅工作量大,而且很难保证三参量控制参数的最优。本文通过对三参量控制算法的研究,提出快速三参量控制参数整定方法,通过仿真及现场试验的方法,将传统的三参量参数试凑法与快速三参量控制参数整定方法进行试验结果对比,结果表明:快速参数整定方法的数值结果与通过参数试凑法得到的试验结果较为一致,保证数值结果的可靠性,另一方面,快速参数整定方法可以缩短控制参数的调节时间,实现三参量控制参数的快速整定[10~14]。
1 三参量控制及其参数整定
地震模拟振动台系统开环传递函数为
(1)
式中ω0为液压系统固有频率,ζ0为液压系统阻尼系数,kv为液压系统开环增益。
三参量控制原理如图1所示,其中,kdf为位移反馈增益,kvf为速度反馈增益,kaf为加速度反馈增益,kdr为位移前馈增益,kvr为速度前馈增益,kar为加速度反馈增益。
三参量反馈控制可表示为
(2)
式中
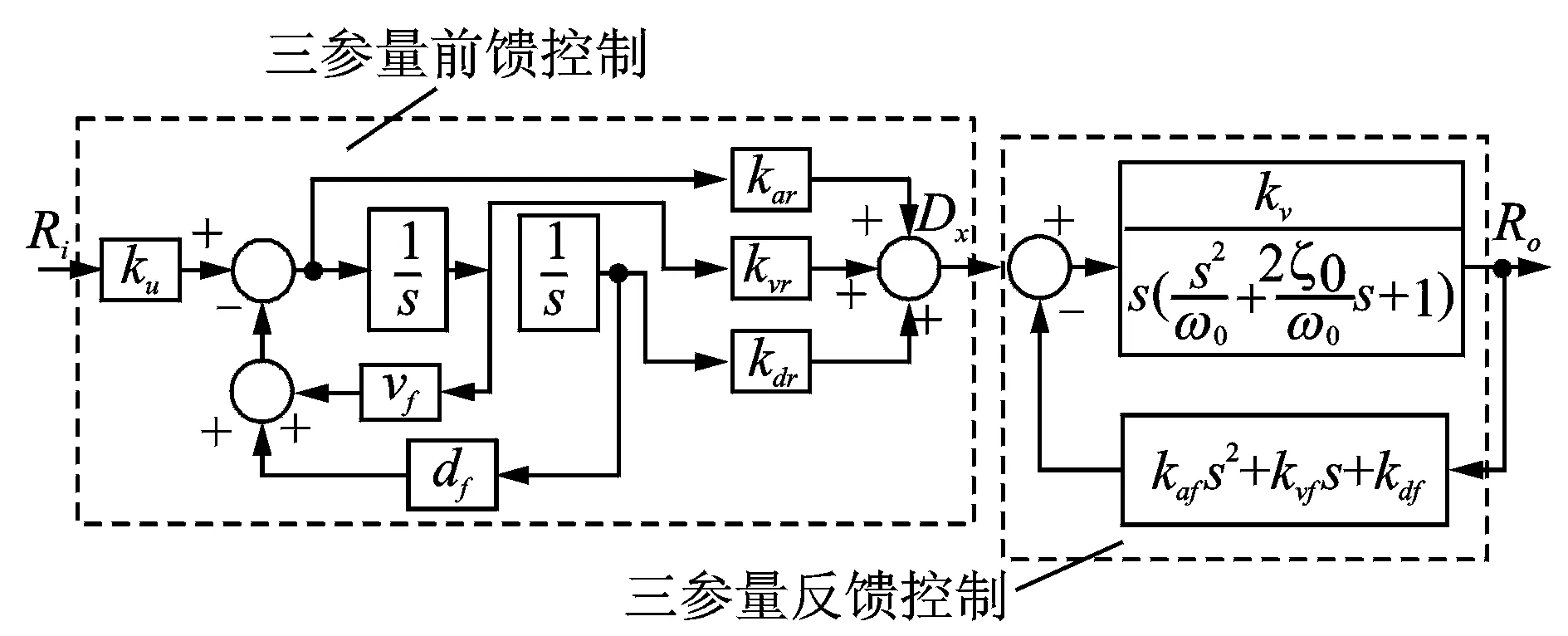
图1 三参量控制原理图
(3)
式(2)可进一步表示为
(4)
设
(5)
则
(6)
联立式(5)和(6),则有
(7)

x3+px+q=0
(8)
其中
(9)
由卡尔丹公式
(10)
所以方程有一个实根,两个虚根。实根为
(11)
由此可得到ωb,从而
(12)
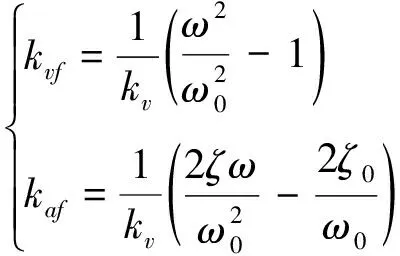
三参量前馈通过对消系统传递函数中距离虚轴较近的极点,实现系统频宽的进一步扩展,由三参量反馈传递函数式(4)可知:
(1)如果ωb<ωc,那么三参量前馈环节应抵消其一阶惯性因子,则三参量前馈传递函数为
(13)
即
(14)
(2)如果ωb>ωc,那么三参量前馈环节应抵消其二阶振荡因子,则三参量前馈传递函数为
(15)
即
(16)
2 三参量控制参数整定仿真
比较分析三参量控制快速参数整定与传统参数试凑法得到的系统控制参数对系统传递特性的影响,同时,进一步分析三参量各个控制参数对系统的作用。建立系统仿真模型如图2所示,液压系统固有频率为40 Hz,阻尼比0.1,开环增益5,模型中考虑了系统因伺服阀遮盖量、连接球铰间隙等引起的波形失真,引入小量噪声信号。
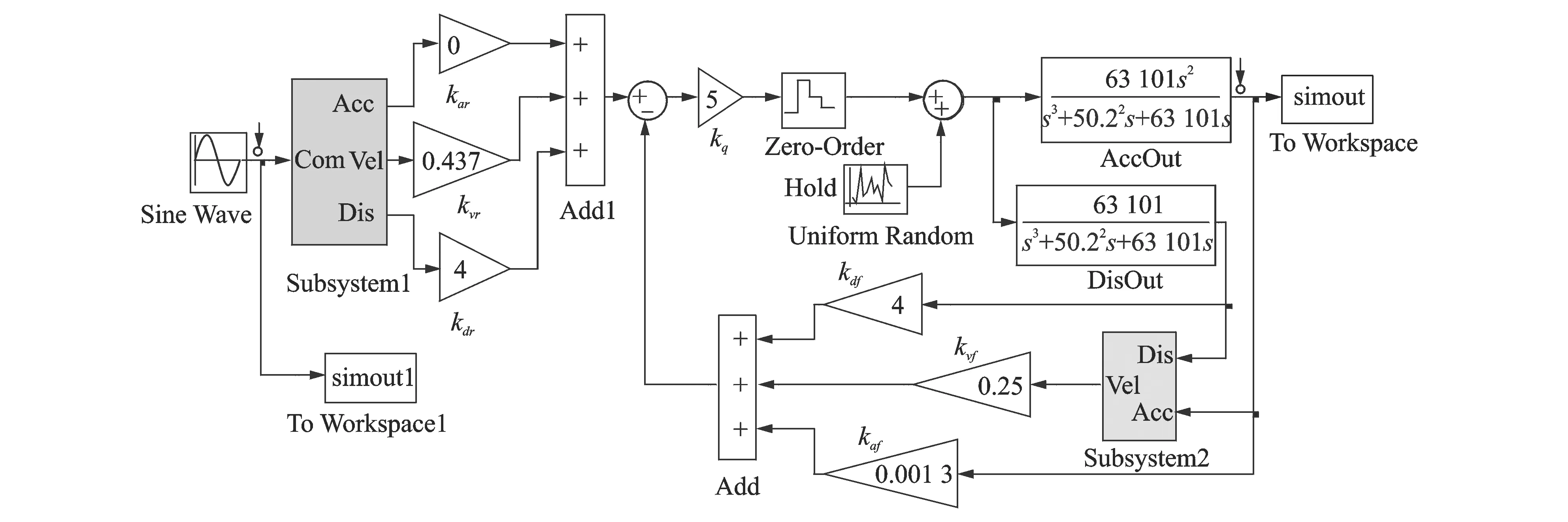
图2 三参量控制仿真模型
三参量前馈信号发生器的离散化模型如图3所示,生成系统的加速度、速度、位移信号;三参量反馈速度合成器的离散化模型如图4所示,通过反馈位移和反馈加速度信号合成系统的反馈速度信号。

图3 三参量控制信号发生器

图4 三参量控制速度合成器
2.1 三参量反馈控制参数整定
三参量控制只有位移反馈控制时,设置控制参数如表1,得到系统Bode图如图5所示。

表1 三参量位移控制参数

图5 位移反馈控制系统Bode图
由图5可知,系统响应幅值随着频率增加而衰减,3.25 Hz时幅值衰减3 dB,亦即系统频宽为3.25 Hz。同时,40 Hz处存在共振峰,此即系统油柱共振峰。
三参量控制参数中引入速度反馈,控制参数如表2,系统Bode图如图6所示。

表2 三参量速度反馈控制参数
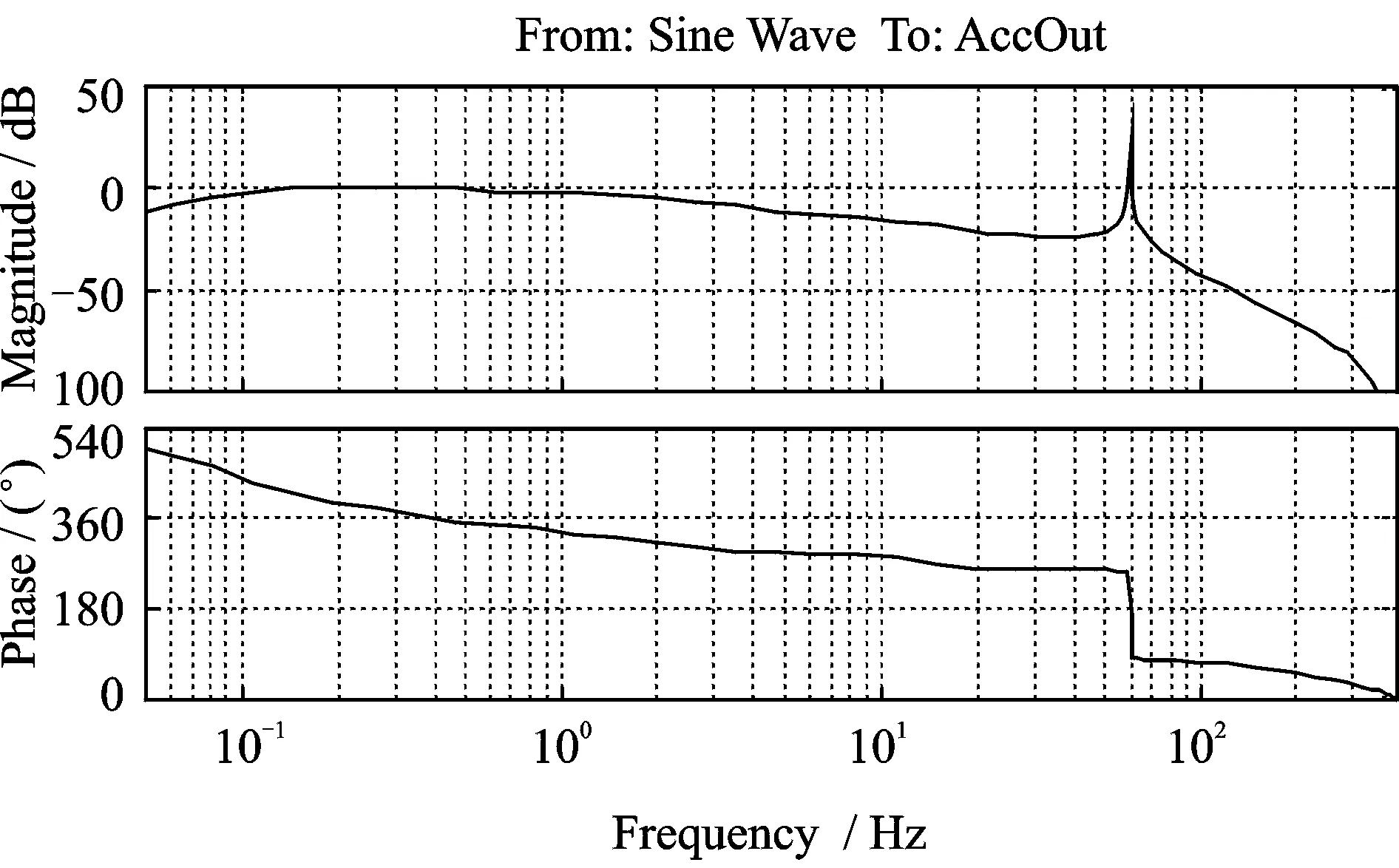
图6 位移、速度反馈控制系统Bode图
由图6可知,通过引入速度反馈,系统的油柱共振频率提高,移动至约60 Hz。
系统中引入加速度反馈控制,设置三参量控制参数如表3,得到系统的Bode图如图7所示。

表3 三参量加速度反馈控制参数

图7 位移、速度、加速度反馈控制Bode图
由图7可知,系统共振峰值明显降低(对比图6),说明由于引入加速度反馈,明显提高了系统的阻尼。
2.2 三参量前馈控制参数整定
在三参量反馈控制的基础上(表3),引入三参量前馈控制,设置三参量前馈控制参数如表4所示,得到系统的Bode图如图8所示。

表4 三参量前馈控制参数
由图8可见,系统Bode图幅值曲线的高频部分整体明显提升(对比图7),说明通过引入三参量前馈控制,可以进一步校正系统频响特性,扩展系统的频宽。

图8 三参量前馈控制Bode图
2.3 三参量控制快速参数整定
通过三参量控制快速参数整定方法确定系统控制参数。考虑把系统工作频宽扩展到90Hz,阻尼比提高到0.6,得到系统三参量控制参数如表5,系统Bode图如图9所示。
表5 快速参数整定三参量控制参数

图9 快速参数整定三参量控制系统Bode图
由图9可知,系统幅值曲线平坦部分扩展到90 Hz,其-3 dB频率达到了110 Hz,系统工作频宽扩展到110 Hz,仿真结果说明了三参量控制快速参数整定算法的有效性。
3 三参量控制参数整定试验
为验证上述三参量控制快速参数整定方法的可靠性,证明三参量控制参数对系统传递特性的影响,以浙江大学流体动力与机电系统国家重点实验室的地震模拟振动台为研究对象(图10)进行试验分析,相关参数如表6所示,振动控制器选用杭州亿恒科技有限公司Premax系列振动控制器。

图10 地震模拟振动台

表6 地震模拟振动台参数
计算得到系统的固有频率和阻尼比:
3.1 三参量控制参数整定
通过参数试凑法与快速整定法完成对系统三参量控制参数的整定,整定过程对地震模拟振动台系统进行正弦扫频试验,扫频频率范围为5~100 Hz,加速度目标谱设置为0.5g恒定值。
3.1.1 速度反馈控制
速度反馈控制的作用是调节系统的共振频率,通过引入速度负反馈可以将系统的共振频率等效提高。这里通过四组实验的对比,研究速度反馈控制的实际效果,三参量控制参数如表7所示,得到系统的传递函数对应图11中的(a),(b),(c)和(d)所示(为便于观察共振峰的变化,截取50~100 Hz图像)。

表7 三参量速度反馈控制参数
由试验结果可知,在不引入速度反馈控制情况下,系统的油柱共振峰约位于75 Hz处(与理论值相近),通过引入速度反馈,系统的油柱共振峰分别移到了82 Hz(图b)、90 Hz(图c)、95 Hz(图d),即油柱共振频率逐级提高。

图11 速度反馈对系统传递函数影响
3.1.2 加速度反馈控制
加速度反馈可以提高系统的阻尼,从而削低系统的油柱共振峰。为研究加速度反馈对系统传递特性的影响,设置四组试验参数(表8),试验结果分别对应图12中的(a),(b),(c)和(d)所示。

表8 三参量加速度反馈控制参数

图12 加速度反馈对系统传递函数影响
由图12试验结果可知,引入系统加速度反馈之后,由于系统阻尼的增大,使得系统油柱共振峰被削低。
3.1.3 三参量前馈控制
三参量前馈控制的作用是对消闭环传递函数中距离虚轴较近的极点,达到扩展系统频宽的目的。这里通过三组试验对比(表9),观察三参量前馈控制的实际控制效果,试验得到系统传递函数如图13中(a),(b),(c)所示。

表9 三参量前馈控制参数

图13 速度前馈对系统传递函数影响
由图13试验结果可知,通过增加前馈控制量,使系统的频响函数曲线整体上升,5~75 Hz范围内已经较为平坦,基本保持在±3 dB范围内(35~40 Hz处受地面连接共同作用的影响出现了结构共振),亦即在工作频宽内,输出信号能较好地复现输入控制信号。
3.1.4 三参量控制快速参数整定
由三参量控制快速参数整定算法计算系统的控制参数,已知系统的油柱共振频率为75 Hz,阻尼比约为0.253,考虑把系统工作频宽扩展到90 Hz,把阻尼比提高到0.7以削低油柱共振峰,计算得到三参量控制参数如表10所示,试验得到的系统传递函数如图14所示。

表10 快速参数整定三参量控制参数

图14 快速参数整定三参量控制系统传递函数
由图14可知,系统传递函数曲线在5~90 Hz范围已经平坦,基本保持在±3 dB范围内(35~40 Hz处受地面连接共同作用的影响出现了结构共振),输出加速度信号能复现输入控制信号。试验表明,三参考控制快速参数整定算法具有良好的整定效果,通过三参量控制,可以把系统传递函数曲线校正到理想的水平。
3.2 波形失真度检测
3.2.1 加速度控制试验
对三参量控制的地震模拟振动台进行正弦驻留试验(三参量控制参数如表10所示),正弦频率分别为5,10,50,80 Hz,加速度目标值0.8g,得到系统的加速度时域响应曲线如图15中(a),(b),(c),(d)所示。

图15 不同频率下振动台加速度控制波形
加速度控制试验对应的系统波形失真度如表11所示。

表11 加速度控制系统波形失真度
由波形失真度分析可知(表11),系统引入三参量控制后, 5,10,50和80 Hz的加速度时域信号波形失真度均符合国家标准《液压式振动试验台检定规程(JJG638-90)》规定的25%以内。
原型地震波的频谱范围一般在0.25~10 Hz,因地震模拟试验大多情况下是进行缩尺模型试验,考虑到模型相似率的要求,相似模拟的频率要升高,亦即要提高使用频率的上限。就地震模拟试验台的规模大小而言,一般大型地震模拟试验台使用频带上限要求为30 Hz,中型地震模拟试验台为50 Hz,小型地震模拟试验台为80 Hz。因此通过三参量控制调试,把系统频宽扩展到90 Hz已能满足地震模拟试验的要求。
3.2.2 位移控制试验
地震模拟振动台低频性能一般以位移响应波形失真度来衡量,而工作频率低是地震模拟试验的一个重要特点,因此,对地震模拟振动台进行低频位移试验,频率分别为0.2,0.5,1和2 Hz,对应的试验结果分别对应如图16中的(a),(b),(c),(d)所示。
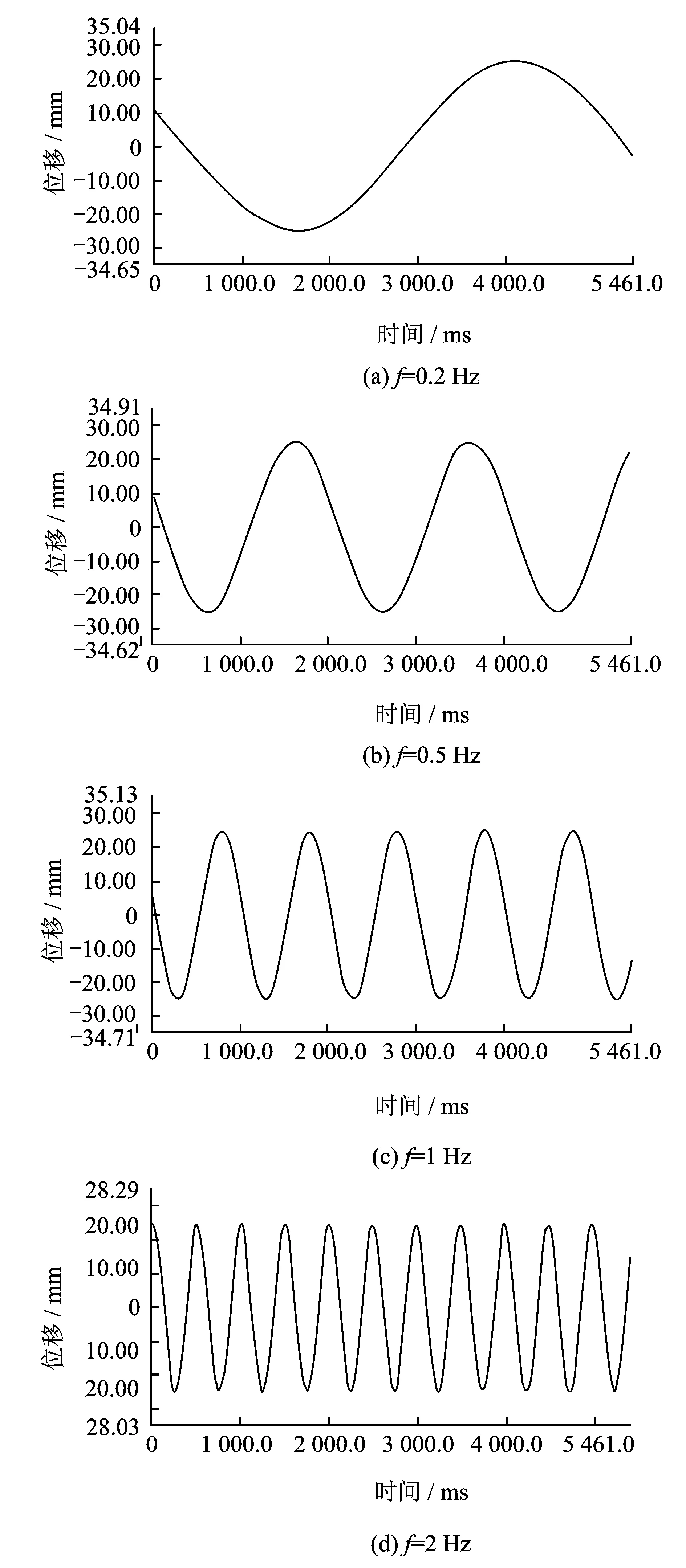
图16 不同频率下振动台位移控制波形
位移控制试验对应的系统波形失真度如表12所示。

表12 位移控制系统波形失真度
表12位移波形失真度均符合国家标准《液压式振动试验台检定规程(JJG638-90)》规定的位移波形失真度5%以内的要求。
4 结 论
通过对地震模拟振动台三参量控制算法的研究,提出了一种快速三参量控制参数整定方法。并通过仿真和试验的方法,验证了这种参数整定方法的可行性,相比于传统三参量控制参数整定过程,这种方法可以极大提高三参量控制参数整定的效率,同时能够保持较高的准确性,可有效保证地震模拟试验过程中波形的复现精度。
参考文献:
[1] 黄浩华. 地震模拟振动台的设计与应用技术[M]. 北京:地震出版社, 2008.Huang Haohua. Shaking Table Design and Application Technology [M]. Beijing: Seismological Press, 2008.
[2] 邱法维,钱稼茹,陈志鹏. 结构抗震实验方法[M]. 北京:科学出版社,2000.Qiu Fawei, Qian Jiaru, Chen Zhipeng. Seismic Test Methodology for Structures [M]. Beijing: Science Press, 2000.
[3] 邱法维, 沙锋强, 王刚,等. 地震模拟振动台控制技术及软件研究[J]. 液压与气动, 2011, (6): 98—101.Qiu Fawei, Sha Fengqiang, Wang Gang, et al. Shaking table control technology and software research [J]. Chinese Hydraulics and Pneumatics, 2011, (6): 98—101.
[4] 唐贞云, 李振宝, 纪金豹,等. 地震模拟振动台控制系统的发展[J]. 地震工程与工程振动, 2009, 29(6): 162—169.Tang Zhenyun, Li Zhenbao, Ji Jinbao, et al. Development in shaking table control system [J]. Journal of Earthquake Engineering and Engineering Vibration, 2009, 29(6): 162—169.
[5] 韩俊伟, 李玉亭, 胡宝生. 大型三向六白由度地震模拟振动台[J]. 地震学报, 1998, 20(3): 327—331.Han Junwei, Li Yuting, Hu Baosheng. Large scale 3 dimension and 6 degree of freedom shaking table [J]. Earthquake Science, 1998, 20(3): 327—331.
[6] Tagawa Y, Kajiwara K. Controller development for the E—Defense shaking table [J]. Proceedings of the institution of mechanical engineers, Part I: Journal of Systems and Control Engineering, 2007, 221(2): 171—181.
[7] Shortreed J S, Seible F, Benzoni G. Simulation issues with a real-time, full-scale seismic testing system [J]. Journal of Earthquake Engineering, 2002, 6(Sp. Iss. S1): 185—201.
[8] Stoten D P, Shimizu N. The feedforward minimal control synthesis algorithm and its application to the control of shaking-tables [J]. Proceedings of the institution of mechanical engineers, Part I: Journal of Systems and Control Engineering, 2007, 221(3): 423—444.
[9] Ammanagi S, Poornima V, Sera A, et al. Development of a digitally-controlled three-axis earthquake shake table [J]. Current Science, 2006, 91(2): 190—203.
[10] 王燕华, 程文瀼. 地震模拟振动台运动控制性能分析[J]. 振动与冲击, 2012, 29(2): 99—106.Wang Yanhua, Cheng Wenrang. Dynamic property of a shaking table simulating earthquake [J]. Journal of Vibration and Shock, 2012, 29(2): 99—106.
[11] 杨志东. 液压振动台振动环境模拟的控制技术研究[D]. 哈尔滨: 哈尔滨工业大学,2009.Yang Zhidong. Research of control technologies of simulation of vibration environment using hydraulic vibration table [D]. Harbin: Harbin Institute of Technology, 2009.
[12] Xu Y, Hua H X, Han J W. Modeling and controller design of a shaking table in an active structural control system [J]. Mechanical Systems and Signal Processing, 2008, 22(8): 1 917 —1 923
[13] 韩俊伟,于丽明,赵慧,等.地震模拟振动台三状态控制的研究[J].哈尔滨工业大学学报, 1999, 31( 3): 21— 28.Han Junwei, Yu Liming, Zhao Hui, et al. Study of three state controller of seismic simulating shaking table [J]. Journal of Harbin Institute of Technology, 1999, 31( 3): 21— 28.
[14] 李振宝, 唐贞云, 纪金豹. 地震模拟振动台三参量控制算法超调修正[J]. 振动与冲击, 2010, 29(10): 211—215.Li Zhenbao, Tang Zhenyun, Ji Jinbao. Overshoot modification of shaking table TVC algorithm [J]. Journal of Vibration and Shock, 2010, 29(10): 211—215.
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
空间科学学报(2020年3期)2020-07-24
现代职业教育·高职高专(2020年10期)2020-01-05
物理学报(2019年24期)2019-12-24
科学与财富(2017年15期)2017-06-03
计算机应用(2016年10期)2017-05-12
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
振动工程学报(2015年1期)2015-03-01
噪声与振动控制(2015年4期)2015-01-01
