
分布式TMD对双密频结构的减振研究
2014-04-02 02:44文永奎胡九战卢文良
振动工程学报 2014年3期
文永奎, 胡九战, 卢文良
(北京交通大学土木建筑工程学院, 北京 100044)
引 言
实际工程中经常采用的对称、准对称或局部对称结构,往往会在一窄段频率范围内存在多阶模态。特别是由空中廊桥联接的双子建筑或处于施工阶段由猫道联接的悬索桥主塔等结构,会出现典型的由两阶模态组成的密集频率结构[1],即双密频结构;而且该型结构因具有柔性大、阻尼小、低频等特点,容易在外荷载激励下发生大幅振动。因此研究具有对称形式的双密频结构的减振将具有重要工程意义。而作为相对成熟的减振措施,TMD因能适应于多种荷载作用下的结构振动控制,被广泛应用。
经典的TMD在设计时通常采用单自由度主结构模型,即视结构为单自由度或将结构简化为单自由度系统。其中,Den hartog 最早给出能使单自由度结构的稳态响应峰值最小的TMD优化频率和阻尼比[2];Jacquot采用了广义质量比,将TMD的优化结果推广到梁结构[3];Warburton假定结构频率非密集分布,进一步将复杂连续结构简化为单自由度系统以优化TMD参数[4]。此外,为提高TMD减振的鲁棒性,多质量阻尼器(Mutiple Tuned Mass Dampers, MTMD)的动力性能得到研究[5~8],但MTMD采用中心TMD对结构某阶频率调谐,且在该频率一定范围内分布多个TMD的方式,仍是针对单自由度主结构的减振。
研究表明,针对TMD设计的单自由度主结构模型,并不适用于密集频率结构的减振设计[9,10]。为有效实现对密集频率结构的减振,Abé指出需要采用不少于所控模态数的多个TMD,且须考虑TMD的空间分布,并给出了在合理布置条件下TMD参数的简化计算方法,但未对TMD的参数优化问题进行探讨[1]。近年来,一些研究通过定义不同的目标函数并采用梯度优化的数值方法,实现了对单自由度主结构减振的MTMD参数优化,大大提高了在参数较多时的优化效率[6~8]。其中,Warnitchai以梁和板结构为例,将Davidon-Fletcher-Powell优化算法进一步推广到多模态减振的TMD参数优化,给出了相应的优化结果和减振效果[11]。此外,文永奎对定义的H2性能目标,通过线性矩阵不等式实现对多阶频率调谐的TMD参数优化,但在TMD个数多时优化的效率低下[12]。
可见,针对密集频率结构的减振,已有的成果对多个TMD参数优化的过程、影响因素以及减振性能评价等方面的研究仍有不足,尚待深入探讨。本文以经典的对称2自由度双密频结构为例,基于H2性能的梯度优化法,研究针对多阶模态减振且空间布置的分布式TMD的参数优化,阐明模态控制权重和模态密集度等因素对优化结果和减振效果的影响。在建立适合闭环静力反馈控制的组合系统模型的基础上,将基于H2性能的梯度优化法扩展至分布式TMD的参数优化;定义结构多模态振动的无量纲响应作为评价指标,以广义模态坐标响应构成控制输出向量,分析并指出能使评价指标峰值相等的模态控制最优权重,给出优化参数和减振性能随模态密集度的变化规律;与经典单TMD设计等方法相对比,分析并验证基于H2性能优化的分布式TMD的减振效果,并确认在TMD个数增多时基于H2性能的梯度优化法的优化效果。
1 系统模型
为实现对密集频率结构的减振分析,本文考虑一个典型的2自由度对称主结构[1,9]。如图1所示,主结构由2个相同的主振子组成,每个振子具有质量ms、相对基础的刚度ks和粘滞阻尼cs;两个振子通过刚度为βks的弹簧耦联。当耦联弹簧的刚度较小时,主结构的2个频率将呈现密集状态,此时主结构为双密频结构。
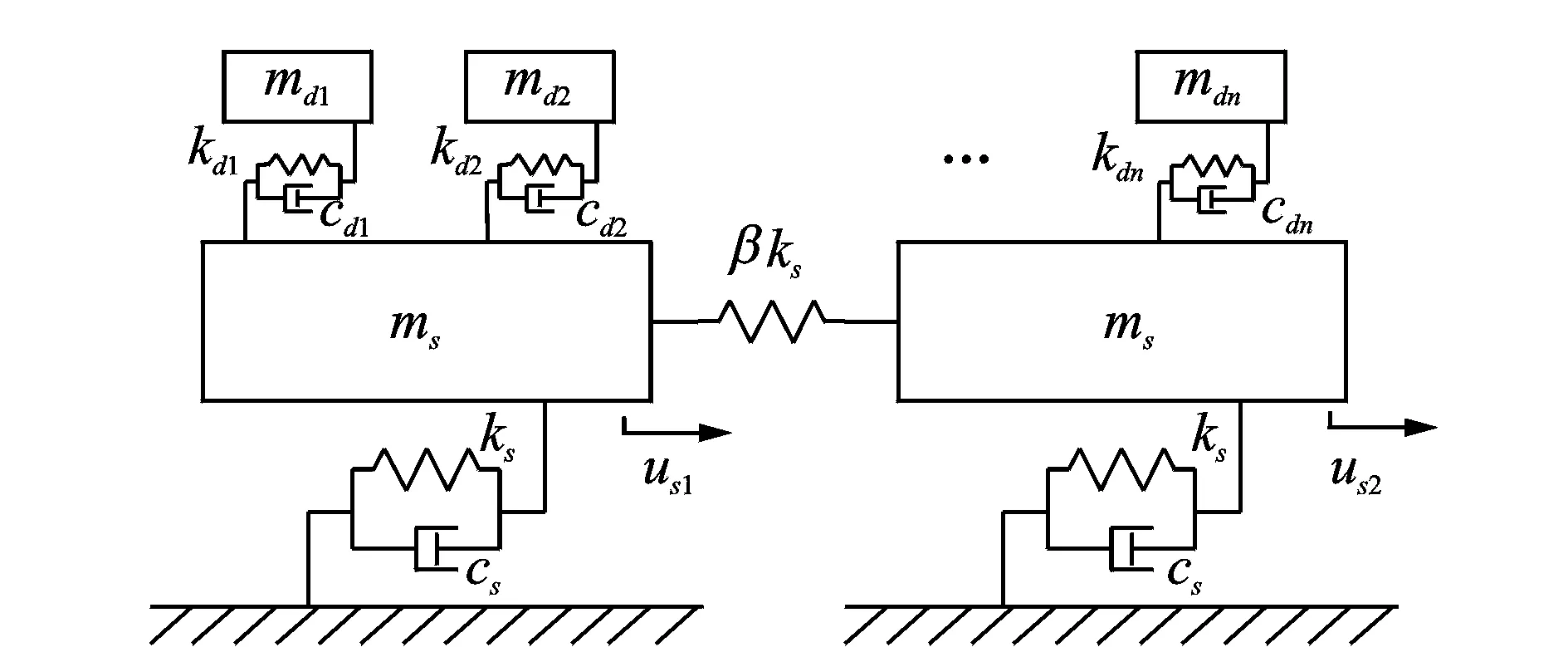
图1 双密频结构与分布式TMD
φTDTP(t)+φTTTfd(t)
(1)

(2)
式中qdi和udi=Tu(s,t)分别为第i个TMD的位移以及相应位置处的主振子位移;cdi,kdi分别为第i个TMD的阻尼、刚度。此时,TMD的运动方程为
(3)

将式(2)代入式(1)和(3),并组合式(1)和(3)得
(4)


式(4)的状态空间形式为
(5)
式中x为2p维状态向量(p=2+n);A*为系统矩阵;Bw为外激励影响矩阵;w为外激励输入,分别表示为:
(6a)
(6b)
(6c)
(6d)
为使减振系统适应于闭环静力反馈控制的H2控制理论,将式(5)改写为
(7)
u=Fdy
(8)

y=Cyx
(9)
(10)
2 基于H2性能的梯度优化法
采用多个TMD对结构多阶模态振动减振时,简化的设计可通过经典的单TMD参数优化方法实现。经典的单TMD参数优化采用动力放大系数作为性能目标函数;假设TMD的安装对结构动力性能影响较小或可被忽略,而且所调谐频率与邻近模态频率间为非密频状态,进而将结构简化为用模态坐标表示的单自由度结构。根据TMD的安装位置和所需控制的模态,依次优化各TMD的参数,从而实现多TMD的参数设计[4,13]。
对稳态随机激励,系统的H2范数反映了单位能量输入时输出响应的均方根值,并成为能够衡量结构响应程度的指标。以H2范数为目标函数,可通过线性矩阵不等式或梯度优化法实现多个TMD的参数优化[7,12],其中Zuo采用梯度优化法实现的针对单自由度主结构减振的MTMD的参数优化,提高了参数较多时的优化效率,为本文所借鉴。本文进一步发展,实现针对多阶模态减振的分布式TMD参数优化,并进行相关的影响因素和减振性能分析。
为建立H2性能目标,将外激励输入w假定为单位白噪声,即外激励输入w的功率谱密度Sw=1。若定义T(jω)为外激励输入w到控制输出z的传递矩阵,则系统的H2范数T(jω)2为控制输出z的均方根值, 即
(11)
式中E[]为括号中量值的期望;tr[]为括号中矩阵的迹;上标H为复共轭转置。H2范数可通过以下求解过程获得:
考虑静力反馈输入后,式(7)和(10)可表示为
(12)
(13)

(14)
式中J即为H2性能目标,是待求参数矩阵Fd的函数;K为对称矩阵(可观性格拉姆矩阵),通过Lyapunov方程求解
(15)
由此,分布式TMD的参数优化就变成使得式(14)值最小,且满足约束方程(15)的Fd值。为便于优化计算,需将其转换为无约束优化问题。为此,引入拉各朗日乘子矩阵L(对称矩阵),并定义等价的目标函数得

BuFdCy)+(A+BuFdCy)TK+
(16)
由式(16)通过矩阵运算,性能目标J对参数矩阵Fd的梯度可表达为
(17)
式中 运算符“⊙”表示矩阵中的对应元素相乘;FP与参数矩阵Fd同维,且与Fd中非零元素相对应的元素值为1,其余值为零而形成的矩阵。式(16)中的矩阵K由式(15)求出,而矩阵L可由下式(Lyapunov方程)求解,即
(18)
式(15)和(18)为线性方程,易于求解。为确保刚度和阻尼参数非负,在求解过程中可通过将Fd中元素改写为平方的形式,再进行梯度矩阵计算来实现[7]。进而,由式(17)得到的梯度矩阵,可便于采用梯度优化法求解。其过程如下:
步1:给出Fd初始值Fd,k,Fd中分量kdi和cdi可通过经典单TMD设计给定,下标i表示迭代步;令k=0。
步2:由给定的Fd,k,通过式(15)和式(18)求解矩阵K和L;进而由式(17)计算矩阵梯度Gk=∂L/∂Fd,k,若‖∂L/∂Fd,k‖足够小则停止,其中‖·‖表示求Euclidean范数。
步3:用BFGS或修正的BFGS等方法求解搜索方向Pk;用Armijo或Wolfe准则求解搜索步长λk;反馈增益更新为Fd,k+1=Fd,k+λkPk; 令k=k+1,转步2。
3 双密频结构减振
与单自由度主结构的MTMD参数优化不同,对图1所示的双密频结构,因具有2个自由度,构成H2性能目标的控制输出向量z中的分量及其权重,直接影响了分布式TMD的优化参数。根据控制目标的需要,z中的分量可选择为结构的位移、速度或加速度响应。当主结构发生双密频模态振动时,无论选择何种结构响应,结构的密集模态对该响应的影响都不可忽略。因此为实现对主结构双密频振动减振,分布式TMD在优化设计时直接取两阶模态的广义坐标,定义控制输出向量z=[α1][q1q2]T,其中α为模态控制权重。
此外,双密频结构的频率密集程度也是影响分布式TMD参数设计和减振性能的重要因素。为定量判别频率密集程度,定义频率密集度为[14]
(19)


(20)
若主结构为单自由度,则式(20)即为结构的动力放大系数。
4 参数优化及减振性能
针对密频结构的多TMD减振问题时,Abé在研究中已指出就结构每阶密集模态的振动至少需要安装一个TMD以实现有效减振,且TMD的安装位置也非常重要[1]。本文先采用2个TMD分布安装在双密频结构的振子上,以简单实例来研究分布式TMD参数优化的过程和影响因素,再进一步实现分布式TMD在TMD个数较多时的减振设计。
4.1 给定密集度时的减振
在主结构的2个振子上各安装一个TMD,并取md1=md2=0.01ms。取小值β=0.04,此时2个振子通过弹簧弱耦联,主结构的两阶频率满足ω2=1.04ω1,为双密频结构。假设2个TMD分别对主结构1阶和2阶频率调谐,采用基于H2性能的梯度优化法进行2个TMD的参数设计。并以频率范围0.8ω1~1.2ω1对第一个主振子进行谐荷载扫频激励,对减振系统的结构响应进行数值计算。
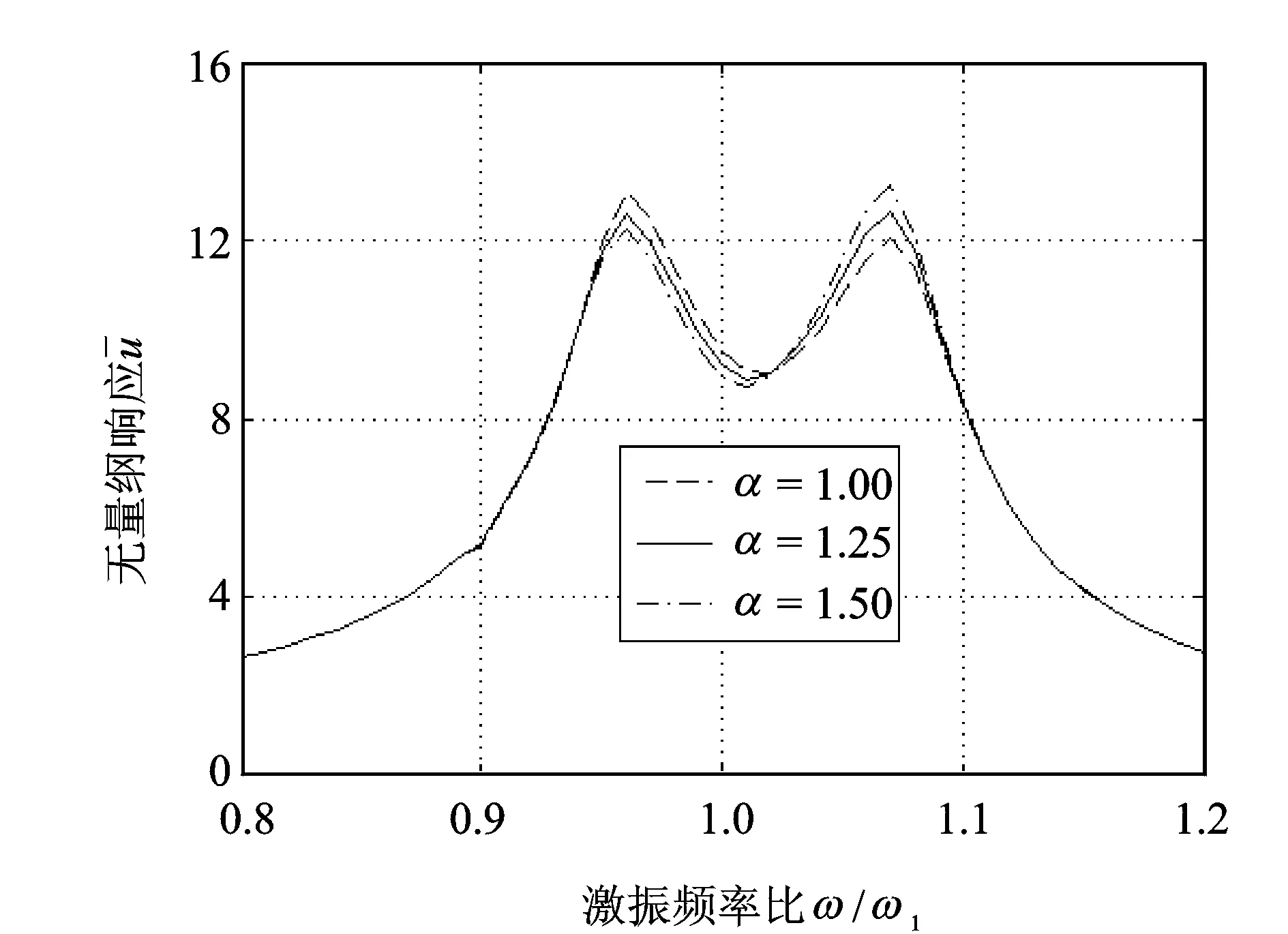
图2 不同模态控制权重时的无量纲响应

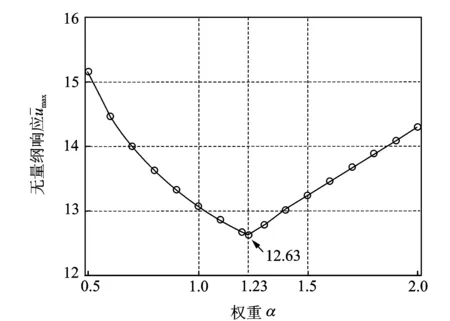
图3 无量纲响应最大值随权重的变化
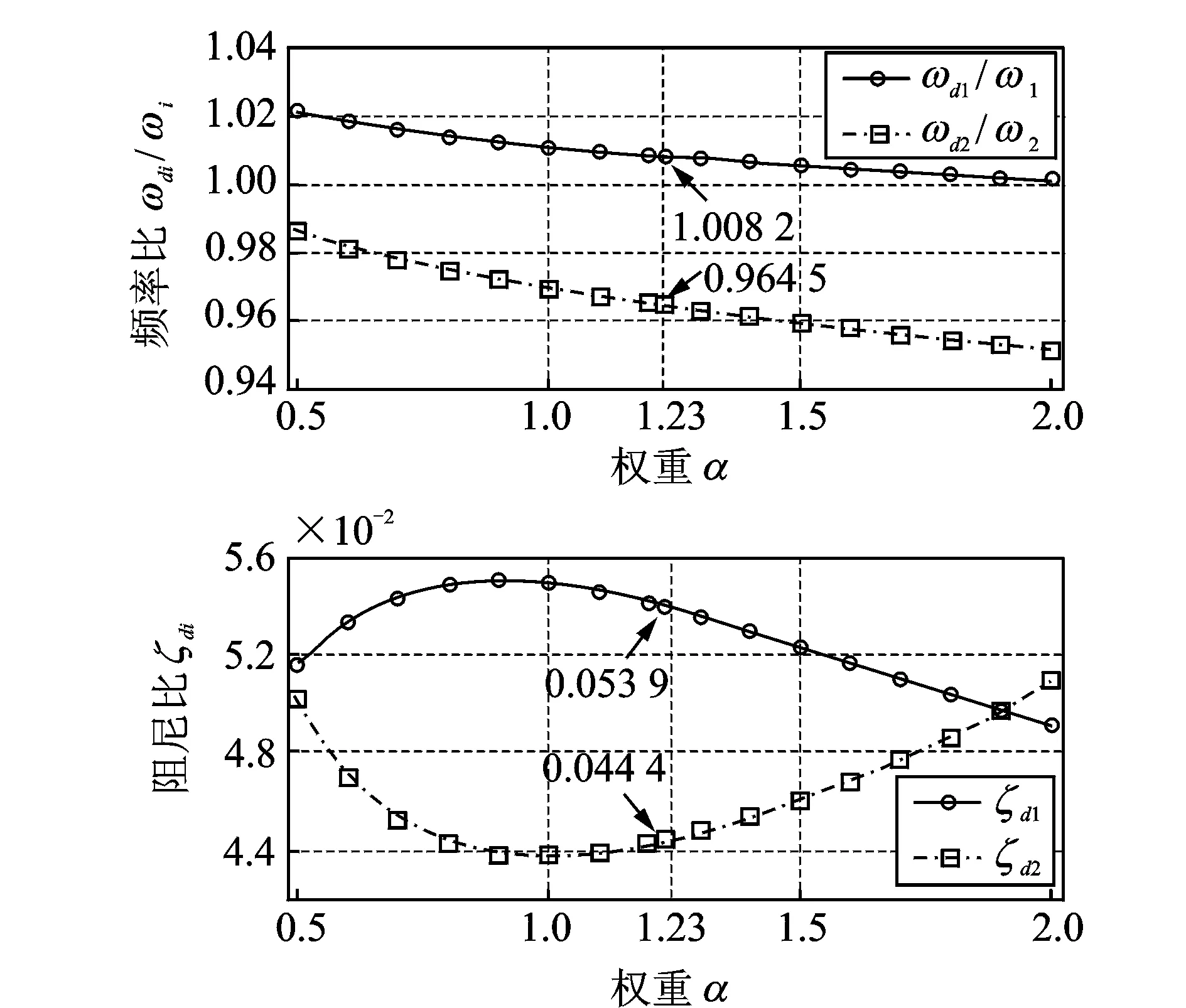
图4 TMD的频率比和阻尼比随权重的变化
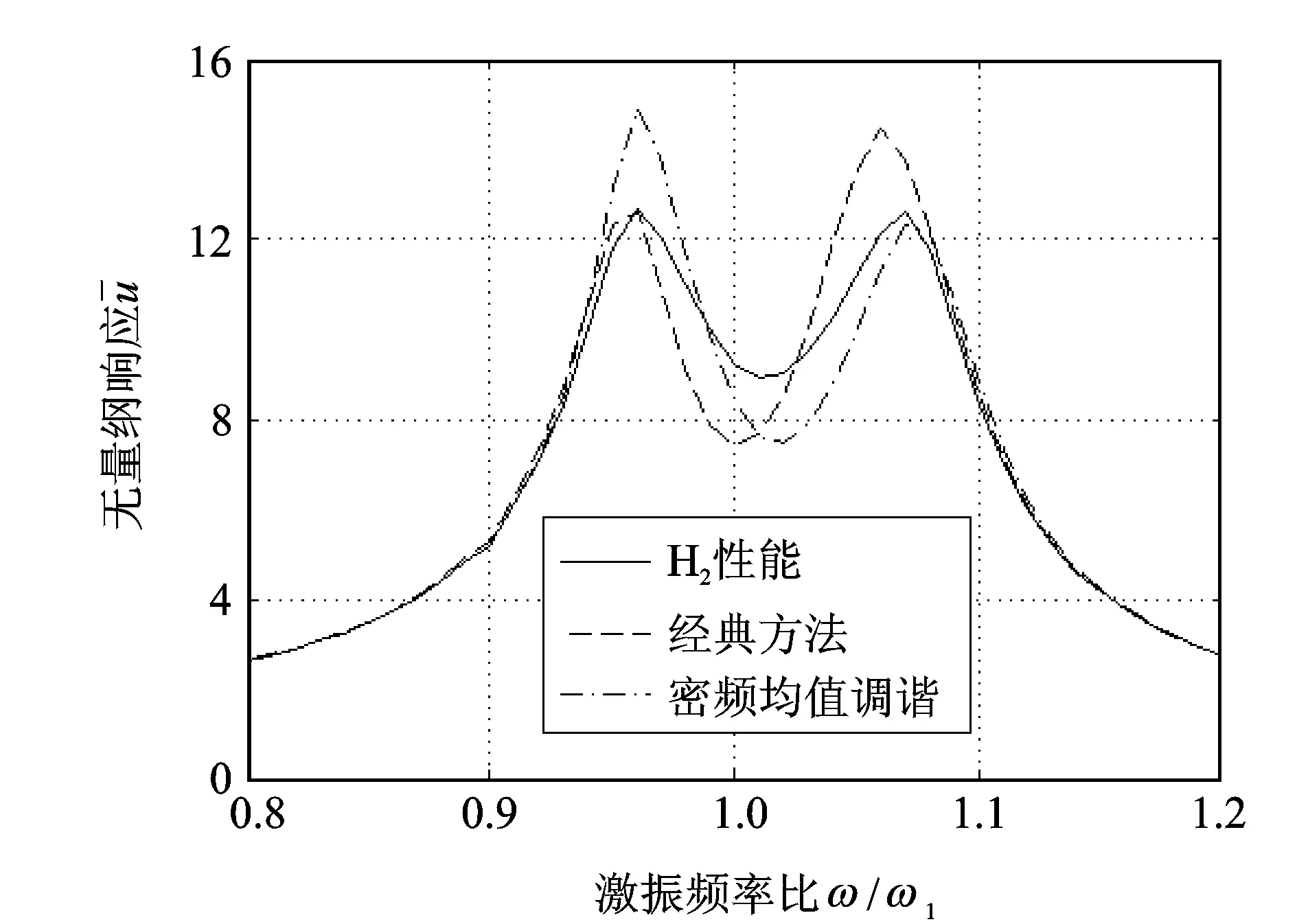
图5 基于H2性能设计的优化减振效果
图5分别给出了基于H2性能、经典方法和密频均值调谐法对2个TMD优化设计时,主结构的无量纲响应随激振频率比的变化[1]。采用经典方法时,忽略密集频率的影响,依据主结构的两阶模态将其简化为2个单自由度系统,由TMD安装位置和所控制的模态,通过动能理论计算每个单自由度系统的等效质量[4,13],进而计算TMD质量比,分别优化2个TMD的参数;经计算得出,每个TMD质量与结构的等效质量之比均为0.005,2个TMD的优化频率比和阻尼比分别为0.995和0.044。采用密频均值调谐法时,2个TMD对主结构的两阶频率的均值调谐,并取经典方法中的优化频率比和阻尼比。由图5可见基于H2性能优化设计的TMD能够使控制系统的无量纲响应峰值最小,减振效果明显优于经典方法和密频均值调谐法。
4.2 不同密集度时的减振


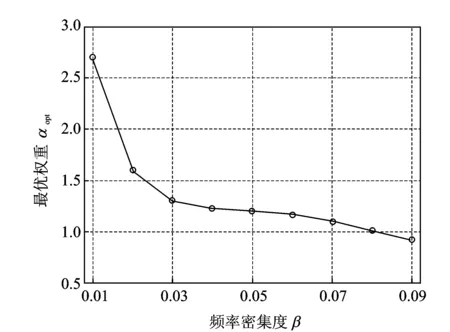
图6 最优权重随频率密集度的变化
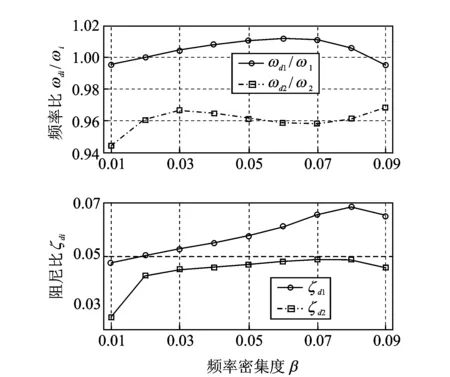
图7 TMD优化频率比和阻尼比随频率密集度的变化
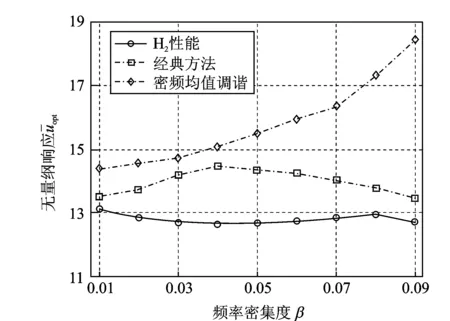
图8 优化后的无量纲响应值随频率密集度的变化
②当β值在0.02~0.08区间变化时,由图7可知基于H2性能的2个TMD的优化频率值在主结构的2个密频间分布,与经典方法优化的TMD频率分布相异;与采用经典方法时相比,图8显示基于H2性能优化所得的TMD的减振性能明显优于前者;
③当β向高值趋近时(如由0.08向0.09变化时),β值与期望的附加模态阻尼比相比显然已较大,主结构将变为非密频结构,由图7可见基于H2性能的2个TMD的优化频率比都小于1,与经典方法优化的TMD频率分布规律趋近;图8显示,相比经典方法,基于H2性能优化结果仍能取得优于前者的减振效果。
④由图8可见,密频均值调谐法作为一种简化设计方法,仅在β值较小时适用;相比于基于H2性能优化和经典方法,所设计的TMD的减振效果较差,并随β值的变大减振效果急剧降低。
4.3 分布式TMD个数多时的减振
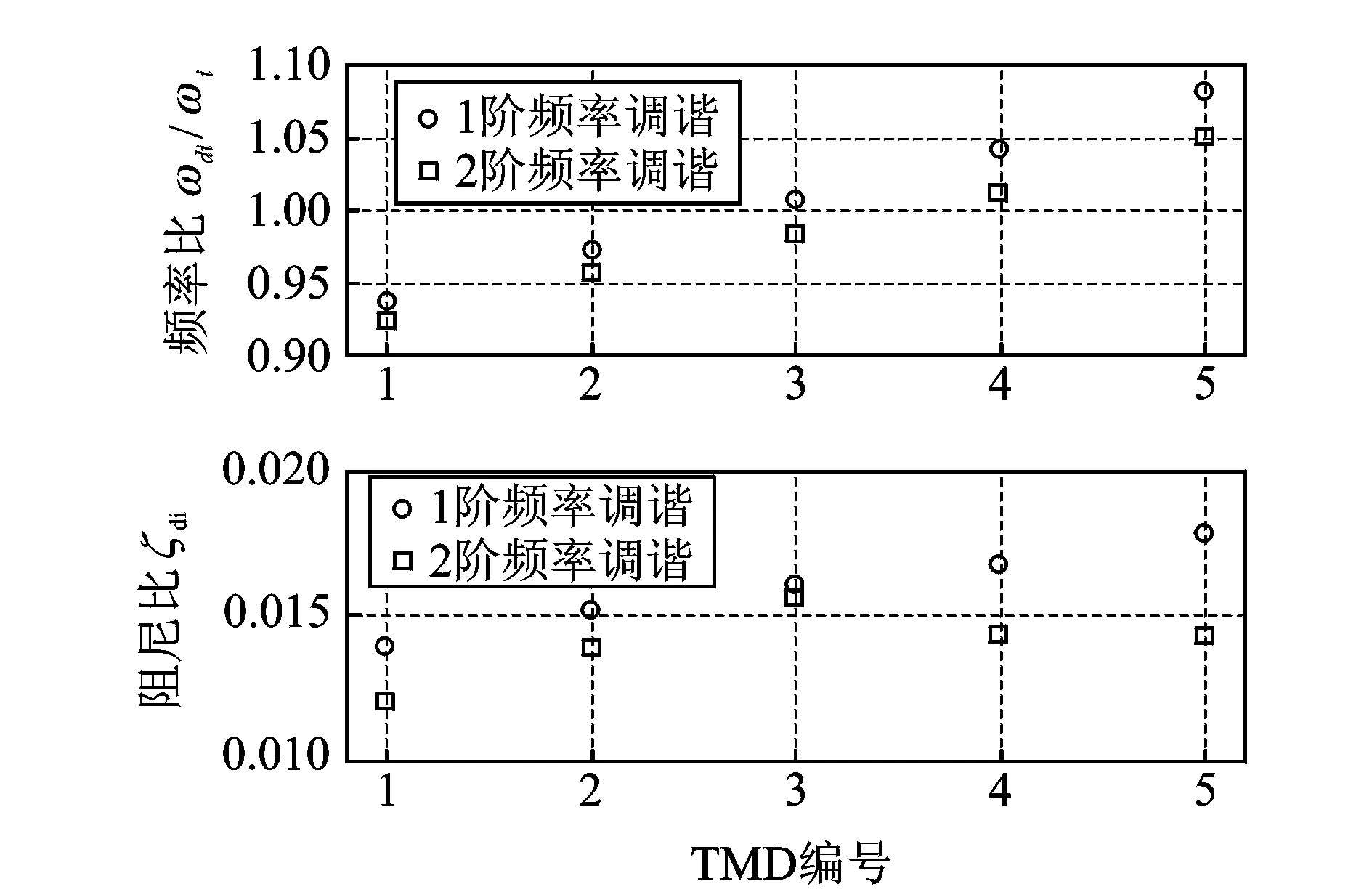
图9 各TMD优化的频率比和阻尼比
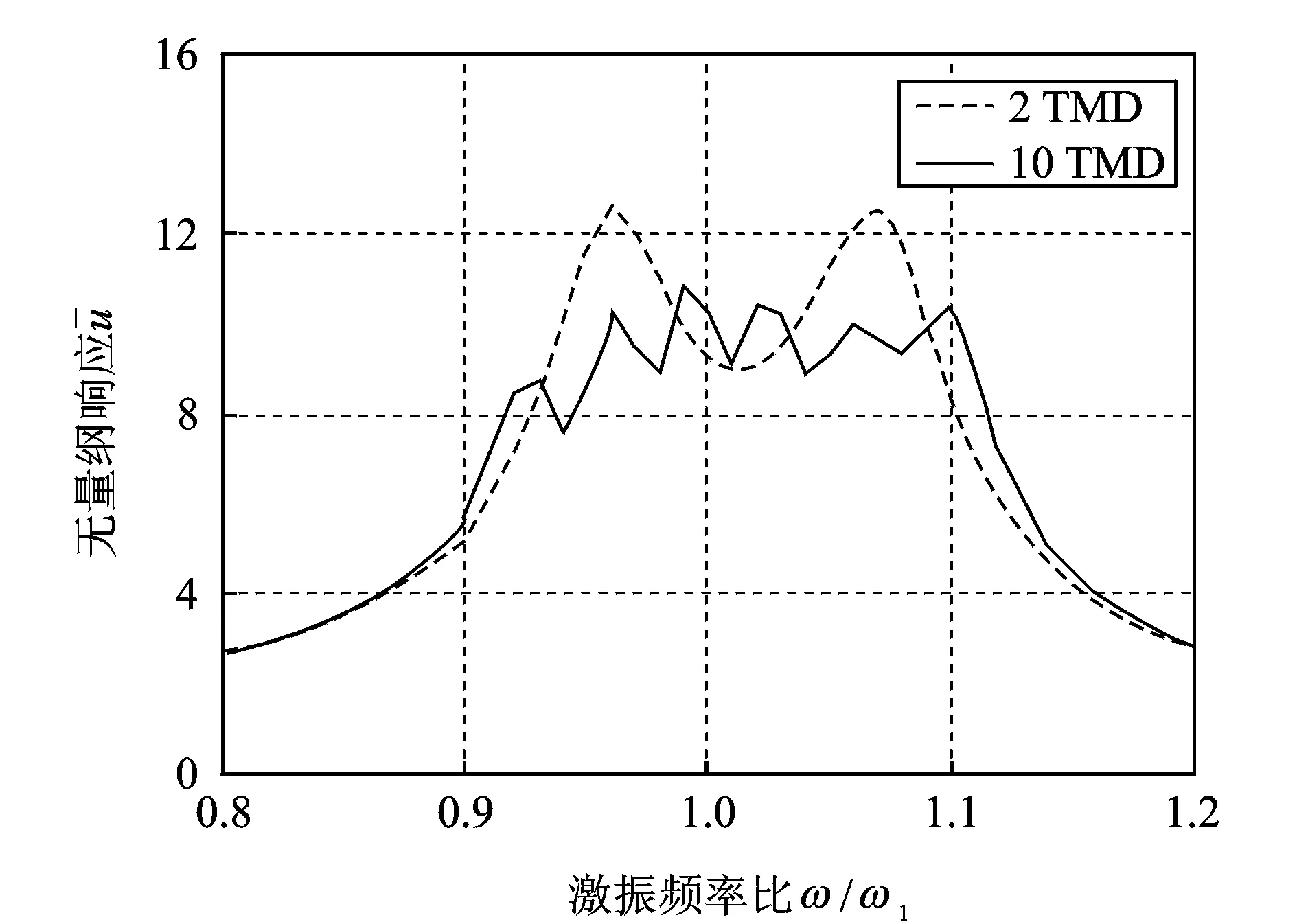
图10 不同TMD个数时的无量纲响应
5 结 论
以典型的2自由度双密频结构为例,建立了适合闭环静力反馈控制的组合系统模型,将基于H2性能的梯度优化法扩展至分布式TMD的参数优化;通过定义针对密集模态振动的控制输出和无量纲评价指标,阐明了模态控制权重和模态密集度对分布式TMD参数优化和减振效果的影响;确认了基于H2性能的梯度优化法设计分布式TMD的高效性。研究发现:
(1)对密集频率结构,以模态响应为控制输出并通过合理选择模态控制权重,可使得评价指标峰值相等,此时分布式TMD达到最优的设计参数和减振效果。
(2)相对于经典方法,基于H2性能优化的分布式TMD在一定模态密集度范围内减振效果更佳;在密集度减小至重频结构,或增大至非密频结构时,虽仍能取得优于前者的减振效果,但减振效果趋近于经典方法。
(3)基于H2性能的梯度优化法具有良好的优化效率,特别是在分布式TMD的个数较多时,目标函数的峰值也增多,减振效果更佳。
参考文献:
[1] Abé M, Igusa T. Tuned mass dampers for structures with closely spaced natural frequencies[J]. Earthquake Engineering and Structural Dynamics, 1995, 24(2):247—261.
[2] Den Harton J P. Mechanical Vibrations[M]. 4th ed. New York: McGraw-Hill, 1956.
[3] Jacquot R G. Optimal dynamic vibration absorbers for general beam systems[J]. Journal of Sound and Vibration, 1978, 60(4):535—542.
[4] Warburton G B, Ayorinde E O. Optimum absorber parameters for simple systems[J]. Earthquake Engineering and Structural Dynamics, 1980, 8(3):197—217.
[5] Igusa T, Xu K. Vibration control using multiple tuned mass dampers[J]. Journal of Sound and Vibration, 1994, 175(4):491—503.
[6] Hoang N, Warnitchai P. Design of multiple tuned mass dampers by using a numerical optimizer[J]. Earthquake Engineering and Structural Dynamics, 2005, 34(2):125—144.
[7] Zuo L, Nayfeh S A, Optimization of the individual stiffness and damping parameters in multiple-tuned mass damper systems[J]. Journal of Vibration and Acoustics, 2005, 127(1):77—84.
[8] Li H N, Ni X L. Optimization of non-uniformly distributed multiple tuned mass damper[J]. Journal of Sound and Vibration, 2007, 308(1/2): 80—97.
[9] Warburton G B. Optimum absorber parameters for minimizing vibration response[J]. Earthquake Engineering and Structural Dynamics, 1981, 9(3):251—262.
[10] Setareh M, Hanson R D. Tuned mass dampers to control floor vibration from humans[J]. Journal of Structure Engineering, 1992, 118(3):741—762.
[11] Warnitchai P, Hoang N. Optimal placement and tuning of multiple tuned mass dampers for suppressing multi-mode structural response[J]. Smart Structures and Systems, 2006, 2(1):1—24.
[12] 文永奎.大跨度斜拉桥施工阶段风振控制研究[D]. 上海:同济大学, 2006.Wen Yongkui. Wind-induced vibration control of large span cable-stayed bridge under construction[D]. Shanghai: Tongji University, 2006.
[13] 文永奎, 孙利民. 大跨度斜拉桥钢塔施工阶段振动控制[J]. 同济大学学报, 2006, 34(9): 1 153—1 158.Wen Yongkui, Sun Linmin. Vibration control of steel tower of large span cable-stayed bridge under construction[J]. Journal of Tongji University, 2006, 34(9):1 153—1 158.
[14] 谢发祥, 孙利民. 受控结构频率密集度的判别及其对控制效果的影响[J]. 山东大学学报, 2009,39(5):101—105.Xie Faxiang, Sun Limin. Judging criterion of structures with closely spaced natural frequencies and its effect on control results[J]. Journal of Shandong University, 2009, 39(5):101—105.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年5期)2021-11-19
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
雷达与对抗(2015年3期)2015-12-09
