
采用预测模式的智能安全气囊控制算法*
2014-03-16 02:35白中浩白芳华刘玉云王玉龙
华南理工大学学报(自然科学版) 2014年3期
白中浩 白芳华 刘玉云 王玉龙
(湖南大学汽车车身先进设计制造国家重点试验室,湖南长沙410082)
安全气囊可以有效保护乘员,使其免受或减轻碰撞伤害.根据美国审计署(US-GAO)报告,当汽车发生正面碰撞时,单独使用安全气囊可以降低14%的重伤率,同时使用安全带和安全气囊可以减少50%的重伤率[1].有研究表明,仅2000—2006年间,美国有1400多人死于安全气囊事故,其中包括600名婴幼儿[2].事故分析结果表明,多数的安全气囊事故是由于安全气囊的误动作造成的,包括安全气囊的误触发和不触发.安全气囊的核心技术是安全气囊点火算法,目前一些常见的研究算法包括加速度峰值法、加速度梯度法、速度变化量法、比功率法以及移动窗积分算法.但这些算法抗干扰性能不佳,可能会造成安全气囊在起伏或阶梯等干扰路况行驶时展开,而且点火时刻控制不精确,造成安全气囊过早触发或推迟触发.
近几年来,智能算法得到了迅速发展,例如神经网络、模糊系统、粒子群算法、基于预碰撞算法[3-8],这些算法在智能控制以及工业使用方面得到了广泛的应用[4-6].刘杰等[7]设计了基于反向传播(BP)神经网的智能控制算法,该算法通过计算碰撞数据可以准确地预测乘员头部的位移,但是没有考虑气囊的起爆方式(单级或多级起爆)及乘员是否佩戴安全带.Lee等[8]进行了基于模糊神经网络的车辆约束系统研究,但主要集中在安全气囊系统与安全带的结合上,没有对控制器进行相应的改进,也没有开发出相应的硬件系统.文中在前人研究的基础上,利用某款车型的整车有限元模型和乘员约束系统的多刚体模型进行仿真,根据仿真数据确定碰撞阈值和起爆时刻,将神经网络与遗传算法相结合应用于安全气囊的控制算法中,开发出相应的智能安全气囊控制器,并通过台车试验验证该智能安全气囊控制器的有效性.
1 仿真模型的建立
由于训练神经网络需要大量的碰撞数据,而在实际研究中无法获取同一车型的大量碰撞数据,有研究表明,可以采用数学仿真的方法提高研发效率,节约研发成本[9-11].据此根据国内某款车型数据建立了其整车有限元模型,该有限元模型主要由壳单元和实体单元组成,其中包含965433个壳单元和122924个实体单元,以及11882个焊点单元.文中建立了完整的车辆-乘员-约束系统(VOR)多刚体碰撞仿真分析模型,并根据中国新车评价(C-NCAP)规程中正面100%重叠刚性壁障碰撞试验验证了模型,试验采用50百分位假人,碰撞速度为50km/h.仿真与试验验证结果对比如图1、图2所示.

图1 试验与有限元仿真的B柱加速度对比Fig.1 Comparison of B pillar acceleration of the test and finite element simulation

图2 试验与多刚体仿真的头部加速度对比Fig.2 Comparison of head acceleration of the test and multi-rigid-body simulation
图1为有限元仿真计算与整车碰撞试验车辆B柱加速度的对比,为比较两条曲线的相似度,采用相关系数来衡量:

式中,ρXY为相关系数,X、Y为两条曲线的向量,Xi、Yi为不同试验所得的曲线向量样本,¯X、¯Y分别为X、Y的期望,N为向量的维数.
通过曲线对比软件分析仿真结果与试验结果可知,其相似度为83%,总体趋势一致,两条曲线的峰值误差也小于10%,说明所建立的有限元模型是有效的[12].
图2示出了多刚体模型与整车试验的头部加速度曲线,通过对比分析可知,相似度为92%,峰值的大小与出现的时刻误差均在15%以内,建立的多刚体模型可以用于后续的研究.
2 智能控制器的算法设计与训练
根据国内某款车型要求,先开发了集成微处理器模块、点火驱动模块、加速度传感器模块、能量储存电路模块以及通信接口模块为一体的安全气囊控制器硬件系统,具体设计可参见本课题组已发表的研究成果[13].
2.1 人工神经网络的数学模型
人工神经网络(ANN)是近几年来发展极为迅速的一种智能算法,它是模仿大脑神经突触连接结构进行信息处理的数学模型.目前在神经网络的多数应用中,基本上均采用BP神经网络及其变化形式.BP神经网络是一种误差进行反向传播的多层前向型神经网络,在信号进行正向传播过程中,每一层神经元只影响下一层神经元,当网络输出与期望输出超出设定的阈值时,网络进行反向传播并修改其连接权值,在特定的学习算法下,使得误差信号越来越小.
BP神经网络的模型如图3所示,总体包括三层网络:第一层为输入层,第二层为隐含层,最后一层为输出层.隐含层可以包含多层神经元,通常采用logsig传递函数,输出层采用线性传递函数.该算法的学习是有监督的学习,训练过程中需要提供输入向量和期望输出.

图3 BP神经网络模型Fig.3 Model of BP neural network
以3层神经网络模型为例,设定输入层的输入数目为M,任意一个输入用m表示,隐含层包含J个神经元,任意神经元为j,输出层为P,任意输出为p.输入层与隐含层任意节点之间的权值记为wmi,隐含层与输出层的权值为wjp,输入样本集为Z=[Z1,Z2,…,ZN],任意样本为zk,期望输出为dk,实际输出为Hk,n为迭代次数,则隐含层第j个神经元的输出为

输出层第p个神经元输出,即网络的输出为

输出层所有神经元的误差能量总和为

式中,dkp为输出层第p个神经元的期望输出.
BP神经网络采用梯度下降学习规则,权值修正公式为

式中,η为学习效率.
2.2 遗传神经网络算法
由于训练样本的有限性以及网络的不稳定性,BP神经网络在训练过程中可能会陷入局部极小点,而不能得到一个全局的最优解.遗传算法能够在复杂空间进行全局优化搜索,并且有较强的鲁棒性.因此,将其应用于神经网络权值的训练学习可以得到较好的结果.
利用遗传算法对网络权值进行优化,在网络训练前期对神经网络权值和偏差进行实数编码,将获得的最优解进行解码作为神经网络训练的初始值,神经网络利用自身优势进行局部范围内的最优解搜索.以下为遗传神经网络的运算过程:
(1)对权值和偏差进行实数编码,并初始化种群P(0)以及设定相应的遗传算子数值;
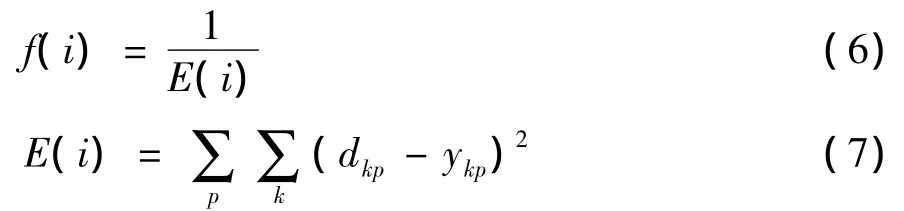
(2)对新一代个体P(t)进行解码获得网络的权值与偏差,通过适应度函数f(i)对个体进行保留,适应度函数采用网络实际输出与期望输出之间误差的平方E(i)的倒数:
(3)以一定的概率对保留的个体进行选择、交叉、变异等遗传计算,得到新的个体P(t+1);
(4)重复步骤(2)和(3),直至达到结束条件;
(5)将获得的最优网络参数进行解码,并作为神经网络的初始值进一步优化;
(6)达到神经网络训练的目标,停止训练.
2.3 安全气囊智能控制算法设计与训练
在算法训练中需要相应车型匹配的最佳点火时刻参数,根据127 mm-30 ms准则[14-16],采用建立的整车有限元模型仿真10、20、30、40、50、60km/h 6个速度段12组,每组获取10条样本,共120个样本曲线,部分加速度曲线如图4所示.
将不同速度下的加速度曲线施加到多刚体分析模型中,分别得到乘员在正确佩戴安全带与未佩戴安全带情况下乘员的头部运动曲线.根据127 mm-30ms准则从图5和图6中可以得出不同的碰撞速度下部分碰撞的最佳点火时刻,见表1.

图4 不同碰撞速度下的车身加速度Fig.4 Vehicle acceleration at different impact speeds

图5 佩戴安全带时不同碰撞速度下假人头部位移Fig 5 Head displacement of dummy with belt at diffe-rent impact speeds
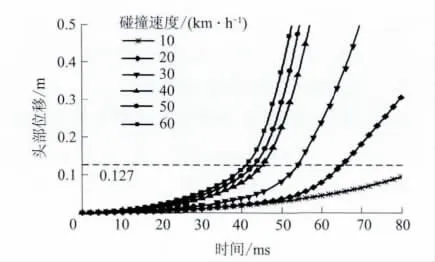
图6 未佩戴安全带时不同碰撞速度下假人头部位移Fig.6 Head displacement of dummy without belt at different impact speeds
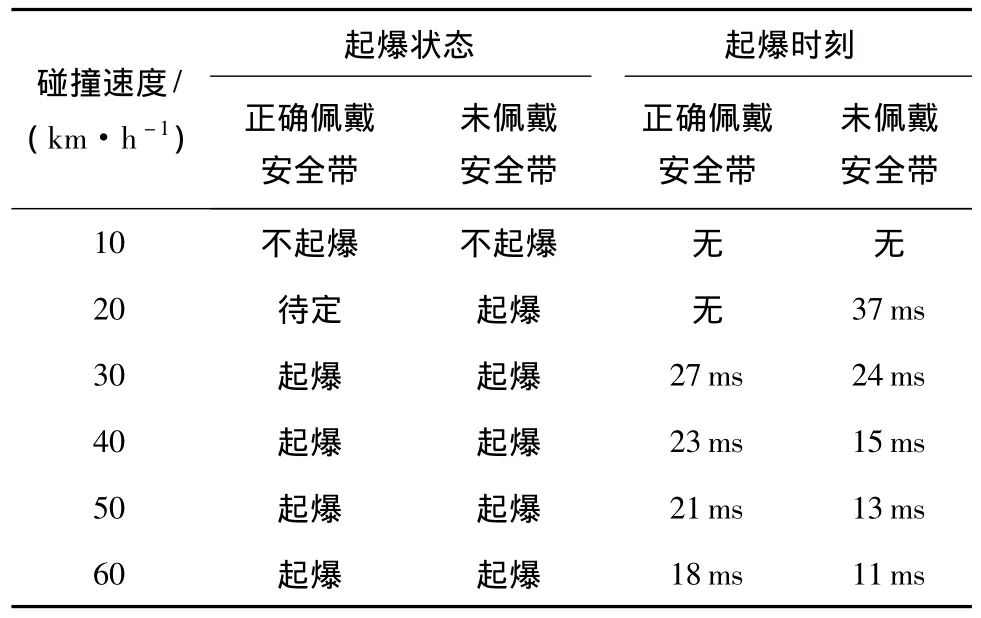
表1 不同碰撞速度下的起爆状态与起爆时刻Table 1 State and time of fire at different impact speeds
将已建立的遗传神经网络模型应用于安全气囊智能控制算法中.首先选取汽车车身加速度作为遗传神经网络算法的输入,汽车碰撞强度以及乘员头部位移作为遗传神经网络算法的输出,文中建立的模型共有12组样本,分别为是否系安全带两种状态及10、20、30、40、50、60 km/h六个速度段12组共120个样本进行训练,样本的部分车身加速度曲线如图4所示.
考虑到现有处理器的负载能力,确定网络结构为2层输入层BP神经网络,传递函数采用logsig函数,输出函数采用线性输出,学习算法采用Trainlm算法.从表1中可以看出,安全气囊一般起爆时刻为碰撞后20~30 ms,所以选取汽车碰撞曲线前20ms的数据作为神经网络的输入,电脑控制单元(ECU)采集加速度的频率为1kHz,即神经网络的输入数目M为20.因神经网络算法计算量较大,故将汽车碰撞强度预测与汽车乘员头部位移预测进行分别建模.在车辆正常运行时,安全气囊控制器实时对碰撞强度进行预测,当检测到碰撞强度达到预定的阈值时,程序会立刻进入乘员头部位移预测模式,根据预测的安全气囊最佳点火时刻进行起爆.以下对汽车碰撞强度预测模型与汽车乘员头部位移预测模型进行分别阐述.
首先是汽车碰撞强度模型的建立,碰撞强度模型以汽车与刚性墙的等效碰撞速度作为输出[16],即输出的神经元数目P=1,则隐层神经元数目J为

式中,a为[1,10]之间的常数.以不同碰撞速度下的仿真加速度曲线以及相对应的速度作为训练样本,利用遗传算法对神经网络的权值参数和偏差参数进行优化,将各个参数进行实数编码并在遗传算法中产生一个初始化种群,经过遗传算法优化搜索而获得一组较优的网络参数编码.利用相应的解码原则将该组最优解带入到网络结构中进行神经网络训练,从而获得一组最优的网络参数.通过对不同数目的隐层神经元进行计算,当取隐层神经元的数目为8时,模型对碰撞强度预测最准确,即神经网络的权值与偏差参数共有20×8+8×1+8+1=177个参数.
汽车乘员头部位移预测模型依然采用碰撞曲线前20ms的数据作为神经网络的输入,乘员头部前60ms的位移数据作为神经网络的输出,乘员头部位移采样频率为500 Hz,即网络的输出个数为30个.根据式(8)确定隐含层的数目,利用同样的原理对神经网络进行训练,当取隐层神经元的数目为10时,模型对乘员头部运动预测最为接近,神经网络的权值与偏差参数共有20×10+10×30+10+30= 540个参数.
根据建立的神经网络模型,对48 km/h系安全带的情形进行预测,预测的乘员头部位移如图7所示,预测模型曲线(ANN)与多刚体仿真模型曲线(MB)的误差曲线即为图7中的Tolerance曲线,最大值小于10 mm,预测模型与多刚体仿真模型具有较好的一致性,可用于下一步的研究.
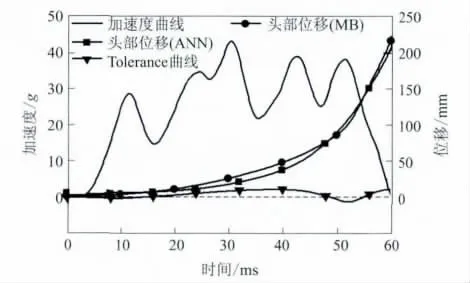
图7 预测模型曲线Fig.7 Predication of model curves
3 试验验证
为验证新开发的安全气囊控制器在真实碰撞条件下的可靠性,考虑到实车碰撞试验成本较高且未进入实车匹配阶段,可通过相应的吸能筒组合方式的台车碰撞试验模拟实车的碰撞曲线[17],对控制器进行了20、30和50km/h的台车试验验证.
通过仿真得到吸能筒的组合方式,考虑到安装的方便性,且整个台车可视为刚体,在台车试验中传感器的安装位置对采集的信号影响不大,因此将控制器安装在台车中央.台车重1035kg.图8所示为30km/h的台车碰撞试验假人状态和气囊起爆状态.
试验得到的安全气囊控制器的输出电压如图9所示.根据127 mm-30 ms准则,通过试验拍摄的高速摄像数据分析可知,30 km/h时安全气囊的最佳起爆时刻为24ms;从数据采集仪采集的控制器输出电压信息(如图9所示)可知安全气囊的起爆时刻为台车碰撞发生后26ms.最佳点火时刻与实际点火时刻相差2ms,该误差在实际允许的误差范围10%以内,对其他两次台车试验的结果进行分析,误差均保持在10%以内.通过台车试验验证了新开发的智能安全气囊控制器的有效性.

图8 30km/h碰撞后假人状态图Fig.8 Dummy state after impaction at the speed of 30km/h

图9 智能安全气囊控制器起爆时刻Fig.9 Fire time of intelligent airbag controller
4 结语
在已开发的安全气囊控制器硬件系统的基础上,建立了目标车型的整车有限元分析模型和完整的车辆-乘员-约束系统多刚体分析模型,为安全气囊初期开发及算法研究提供了一个有效的开发平台.建立了基于预测模式的安全气囊点火优化算法模型.台车试验表明所开发的气囊控制器能够准确地判断碰撞状态并进行起爆控制.
文中对算法训练采用的样本主要来自仿真结果,与实际碰撞状况有一定的差异,在以后的研究中需要进行更严格的验证.另外,目前主要针对正面单工况进行训练,在以后的研究中需要将柱碰撞、斜碰撞等工况扩充到该系统,使该系统具有更好的适应性.
[1] United States General Accounting Office.Vehicle safety technologies,challenges,and research and development expenditures for advanced air bags,GAO-01-596[R]. Washington D C:GAO,2001.
[2] Kwanghyun Cho,Seibum B Choi,Hyeongcheol Lee.Design of an airbag deployment algorithm based on precrash information[J].IEEE Transactions on Vehicular Technology,2011,60(4):1438-1452.
[3] Hannan M A,Hussain A,Samad S A.Sensing systems and algorithms for airbag deployment decision[J].IEEE Sensors Journal,2011,11(4):888-890.
[4] 赵丁选,崔功杰.基于改进BP网络的工程车辆自动换挡策略[J].华南理工大学学报:自然科学版,2008,36 (10):67-70,75. Zhao Ding-xuan,Cui Gong-jie.Automatic shift strategy of construction vehicle based on improved BP algorithm[J]. Journal of South China University of Technology:Natural Science Edition,2008,36(10):67-70,75
[5] San P P,Ling S H,Nguyen H T.Industrial application of evolvable block-based neural network to hypoglycemia monitoring system[J].IEEE Transactions on Industrial Electronics,2013,60(12):5892-5901.
[6] Zhou D W,Gao X,Liu G H,et al.Randomization in particle swarm optimization for global search ability[J].Expert Systems With Applications,2011,38(12):15356-15364.
[7] 刘杰,孙吉贵,李红建,等.基于BP神经网络的气囊点火算法模型[J].吉林大学学报:工学版,2008,38 (2):414-418. Liu Jie,Sun Ji-gui,Li Hong-jian,et al.Setup of BP-ANN based crash sensing algorithm[J].Journal of Jilin University:Engineering and Technology Edition,2008,38 (2):414-418.
[8] Lee J,Kim T.A messy genetic algorithm and its application to an approximate optimization of an occupant safety system[J].Proceedings of the Institution of Mechanical Engineers Part D:Journal of Automobile Engineering,2009,223(D6):757-768.
[9] Seo Y,Chung S H,Yoh J J.Automotive airbag inflator analysis using the measured properties of modern propellants[J].Fuel,2011,90(4):1395-1401.
[10] Abdel-Nasser Y A.Frontal crash simulation of vehicles against lighting columns using FEM[J].Alexandria Engineering Journal,2013,52(3):295-299.
[11] Teng T,Chang F,Liu Y,et al.Analysis of dynamic response of vehicle occupant in frontal crash using multibody dynamics method[J].Mathematical and Computer Modelling,2008,48(11):1724-1736.
[12] 陈天志.基于整车安全性的纵梁S段结构改进研究[D].长沙:湖南大学机械与运载工程学院,2007.
[13] 王玉龙,白中浩,刘曜,等.基于乘员类型特征识别的智能安全气囊控制系统[J].汽车安全与节能学报,2012,3(3):225-231. Wang Yu-Long,Bai Zhong-hao,Liu Yao,et al.Airbag intelligent control system for different types of occupants based on characteristic identification[J].Journal of Au-tomotive Safety and Energy,2012,3(3):225-231.
[14] Bengt pipkorn.Crash sensing and algorithm development for frontal airbag systems using CAE methods and mechanical tests[C]∥ Proceedings of 2004 SAE World Congress.Detroit:SAE,2004:1633-1643.
[15] Behera B K,Goyal Y.Artificial neural network system for the design of airbag fabrics[J].Journal of Industrial Textiles,2009,39(1):45-55.
[16] Faber P,Forstner W.A system architecture for an intelligent airbag deployment[C]∥Proceedings of the 2000 IEEE Intelligent Vehicles Symposium.Dearborn:IEEE,2000:70-75.
[17] Beeman S M,Kemper A R,Madigan M L,et al.Kinetic and kinematic responses of post mortem Human surrogates and the hybrid III ATD in high-speed frontal sled tests[J].Accident Analysis&Prevention,2013,55:34-47.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
山东冶金(2022年2期)2022-08-08
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
昆钢科技(2020年6期)2020-03-29
汽车电器(2018年1期)2018-06-05
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
工业炉(2016年1期)2016-02-27
汽车文摘(2015年11期)2015-12-02
