基于多传感器信息的状态推理辨识方法*
2014-03-16 02:35:54叶彦斐王柏林张勇气张晓军
华南理工大学学报(自然科学版) 2014年3期
叶彦斐 王柏林 张勇气 张晓军
(1.河海大学能源与电气学院,江苏南京211100;2.南京富岛信息工程有限公司,江苏南京210061)
在原油管道调合过程控制系统中,需要检测管道压力、调合罐液位、掺炼流量及原油温度,辨识当前调合过程运行的压力、液位、流量等状态,这对顺利实现原油调合的优化控制至关重要[1].对于流量、温度等一般物理量,采用单一传感器进行测量判断即可达到要求;而对于辨识压力、液位状态等关系到调合过程可靠运行的重要物理量,往往需要安装多个同种或不同种类型传感器同时进行数据采集.例如,为了辨识管道压力状态是“正常”、“欠压”或“过压”,需在管道中不同位置安装多台压力传感器进行推理辨识;为了辨识调合罐液位状态是“正常”、“过低”或“过高”,往往需要安装多个液位传感器、压力传感器或最直接的液位开关,综合多种传感器信息实现对液位状态的辨识[2].
在自然或人为干扰条件下,单个传感器抗干扰能力差,存在失效风险,系统可靠性不足;采用多个同种类或不同种类传感器时,部分传感器采集的信息不可避免地与实际量偏差较大,导致冲突信息存在.对于这些冲突信息,目前多采用数学平均或简单逻辑处理等方法辨识系统运行状态,也存在辨识精度低、可靠性差等缺点.
D-S证据推理[3-4]可以方便表示、处理及合成不同层次属性的不确定性,不受先验概率限制,灵活性强,广泛应用于状态辨识、故障推理和信息融合等领域.然而,D-S证据理论在处理高度冲突证据推理时存在诸如组合结果矛盾、一票否决、鲁棒性等问题[5],导致最终获得有悖常理、违反直觉的结论.
学者们对此提出了一些改进的证据推理方法,但同时也带来了诸如推理结果不收敛、收敛速度慢等新问题[6-10].文中提出了一种新的证据推理规则,实现了基于证据全局有效性的证据源修正以及局部冲突的合理分配,从而最大程度地减少了“坏值”对融合结果和决策的影响.新的证据推理规则应用于原油管道调合过程状态辨识时,可以提高原油调合过程状态辨识的收敛速度,降低决策风险,增强系统可靠性.
1 原油管道调合过程状态推理辨识概述
如图1所示,基于多传感器信息的原油管道调合系统中,控制系统采集大量现场过程数据,基于文中提出的推理辨识方法对调合过程状态进行辨识,获得调合过程状态的准确估计,进而执行相应的控制策略,实现对原油管道调合过程的优化控制.具体推理辨识过程为:多个同种类或不同种类传感器采集原油管道不同测点压力(或储罐液位等)物理量数据,基于模糊化方法获取多个不同传感器对同一物理量多种运行状态子集的基本概率分配(BPA),即实现多个传感器的证据信息获取,得到对应不同证据E1、E2、…、En;然后,采用新的证据推理规则基于证据全局有效性的证据源修正以及局部冲突的合理分配,对各传感器BPA进行融合推理,辨识获得原油管道调合过程的关键运行状态.
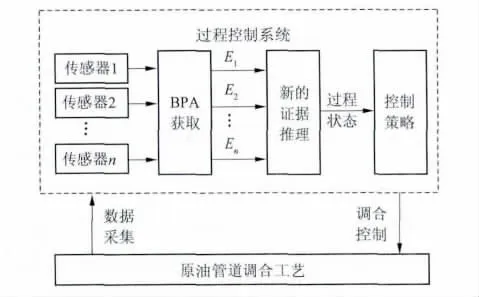
图1 基于多传感器信息的原油管道调合系统Fig.1 Crude oil pipeline blending system based on multisensor information
2 基于隶属度曲线的BPA获取
在原油管道调合过程中,基于传感器事先获得的物理量值与对应的实际运行状态,建立该传感器对某调合状态的隶属度曲线;传感器实时采集实际物理量值,基于建立的隶属度曲线,获取各传感器对应的运行状态子集的BPA[11].
2.1 隶属度曲线建立
传感器获取的大量物理量值与实际运行状态数据形成量值-状态样本,统计测得的量值的最小值、最大值、平均值及对应状态关系,可以建立隶属度曲线来描述该属性的多种状态子集.
为辨识原油管道调合中掺炼线中的压力状态,首先,收集某传感器采集的压力值与实际运行状态数据,形成该传感器的的压力值-状态样本数据,基于这些压力样本数据建立该传感器的原油调合压力值-状态隶属度曲线.以某一台压力传感器为例,压力状态“正常”的区间范围为2.00~2.20 MPa,均值为2.10MPa;压力状态“欠压”的区间范围为1.00~2.05MPa,低于1.80MPa确认“欠压”置信度为1;压力状态“过压”的区间范围为2.15~3.00 MPa,高于2.50MPa确认“过压”置信度为1.该压力传感器对应的隶属度曲线如图2所示,横坐标表示实际采集的压力大小,3条曲线分别表示“欠压”、“正常”及“过压”状态的隶属度曲线,某压力与某条隶属度曲线的交点纵坐标表示该压力属于对应状态的可能性大小.
同样方法获得其他传感器对原油调合过程压力状态的隶属度曲线.
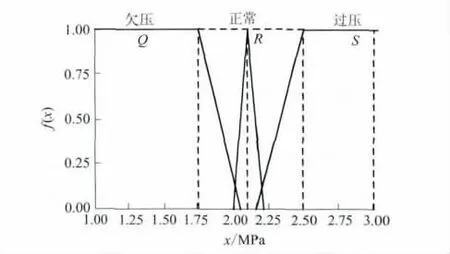
图2 压力值-状态隶属度曲线Fig.2 Pressure value-status membership degree curve
2.2 基本概率分配获取
基于确定的隶属度曲线函数值大小,获取基本概率分配具体策略如下:
(1)当传感器采样的数据与所有运行状态子集表示的隶属度曲线不相交时,m(∅)=1,认为该采样数据不支持任一运行状态子集分类;
(2)当采样数据与某运行状态子集属性的隶属度曲线相交时,交点纵坐标为支持该运行状态子集分类的基本概率分配;
(3)当采样数据与多个运行状态子集的隶属度曲线相交时,多个交点的纵坐标为支持多种不同运行状态子集的基本概率分配[12];
(4)对生成的基本概率分配进行归一化处理,使多种运行状态子集的基本概率分配之和等于1,获得对应该传感器的多种运行状态子集BPA.
分布于原油管道调合掺练线管道不同位置的压力传感器采集不同测点压力数据,这些数据与对应传感器多种运行状态子集隶属度曲线对比,可以获取该传感器的多种运行状态BPA.
如图2所示,若以Q代表“欠压”,R代表“正常”,S代表“过压”,若某一台压力传感器测得当前管道压力为2.04MPa,则f(Q)=0.13,f(R)=0.48,f(S)=0;对其进行归一化获得该传感器对当前原油调合状态的BPA:
m(Q)=0.213,m(R)=0.787,m(S)=0.
然后,将不同压力传感器采集到的不同压力数据与其对应的隶属度曲线对比,获得不同传感器对当前原油调合状态的基本概率分配.
3 已有推理辨识方法
3.1 D-S证据推理
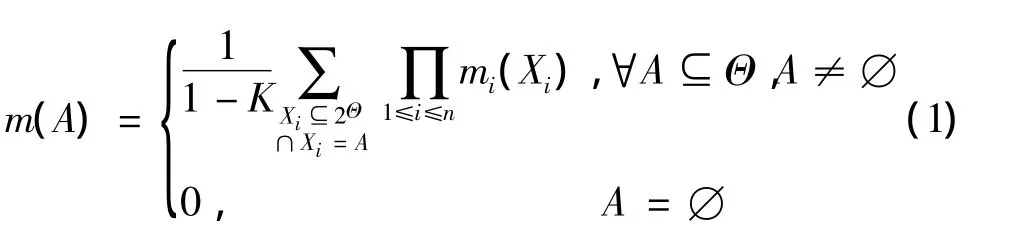
同一识别框架下n个独立概率分配函数m1,m2,…,mn,其D-S证据推理结果的概率分配函数m是n个概率分配函数的正交和:
3.2 D-S推理规则改进方法
基于修改D-S推理规则的方法,认为D-S方法的归一化步骤产生不合理结果,主要解决如何将冲突重新分配和管理的问题.
Yager推理规则[6-7]认为,既然对证据的全局冲突无法作出合理的选择分配,就应将其归入未知集合.该方法在各证据间冲突为零时与D-S合成公式处理是一样的;而对冲突证据信息则完全否定,显得非常保守.
文献[8]推理规则采用了加权和的形式,当证据冲突k较小时,合成结果近似于D-S的结果;当证据冲突较大时,合成结果主要由总体证据可信度和证据平均支持度的乘积决定.文献[8]认为证据之间冲突是部分可用的,并且可用程度取决于总体证据的可信度.但是该方法未考虑不同证据的可信程度,使不同可信程度证据不加区别地加入推理过程.同时,由于其基于全局冲突分配,分配精度低,“聚焦”速度较慢.
基于修改原始证据源的方法认为,D-S推理规则本身并没错,在证据高度冲突时,首先应对冲突证据信息进行预处理,然后再使用D-S证据推理规则.
Murphy推理规则首先将证据的基本概率分配进行平均来减少冲突信息的影响,然后再用D-S推理规则进行信息融合[9].该推理规则可以处理冲突证据且收敛速度较快,但并没有考虑各个证据之间的相互关系.
文献[10]的推理规则引入基于证据相似性的可信度,并将其作为权重对多源证据进行加权平均,然后再利用D-S推理规则推理证据信息.该方法考虑了证据之间的关联可信程度,继承了Murphy方法的所有优点,具有更快的收敛速度和更强的抗干扰能力.
但是,由于这两种规则最终均靠D-S推理规则融合,因此都存在局部冲突在全局分配的问题.
4 一种新的证据推理规则
文中综合证据源的修正和局部冲突的合理分配提出了一种新的证据推理规则,具体步骤如下.
4.1 证据众信度计算
Θ是一个包含N(大于2的自然数)个两两互斥命题的完备辨识框架,2Θ是Θ的幂集,Ap是2Θ中第p个元素,m(Ap)是Ap的基本概率分配,一个证据的基本概率分配是一个以m(Ap)为坐标的向量m,表示为m=[m(A1),m(A2),…,m(A2N)],其中,Ap∈2Θ,A2N=Θ,m(Ap)≥0,p=1,2,…,
设mi和mj是辨识框架Θ上的两个基本概率分配,mi和mj间的Jousselme距离[15]为

若系统中证据体的数目为n,计算其中不同证据体之间的距离,获得距离矩阵:

则第i个证据Ei到证据集中其他证据的均方根距离为

式中,di反映了证据Ei与证据集中其他证据的差异程度[16].
定义证据Ei的众信度:

式中,di、dj分别反映了证据Ei、证据Ej与证据集中其他证据的差异程度.
定义证据绝对众信度:

若某一证据绝对众信度为1,表示其受支持程度最高,为首要证据;而其余证据则为次要证据.
4.2 证据源修正
以绝对众信度ri作为证据Ei的权重,对原始证据集的基本概率分配进行修正.若原始证据Ei的基本概率分配为 mi=[mi(A1),mi(A2),…,mi(As),…,mi(Θ)],则证据源修正后基本概率分配为

4.3 证据按权重排序
为减小冲突证据对最终组合结果的影响,对修正后多个证据源按其权重ri(i=1,2,…n)由小到大重新排列为m'a,m'b,…,m'k,即众信度小的证据先组合,大的后组合.
4.4 新的证据组合公式
产生冲突的焦元可能有多个,这些焦元之间都存在不同程度的一致性和矛盾性,其对相关命题的影响应在融合中分别体现出来.D-S证据组合规则等全局冲突再分配方式较为粗糙,而新的证据组合公式对于一致性部分采用乘性算子,提高聚焦能力;对于冲突部分,将局部冲突在引起冲突的焦元间进行加性合理分配,增加组合推理可靠性.
对于最小权重的两个基本概率分配m'a、m'b,按新的公式组合:

按式(8)得到新的组合结果,再与下一个修正排序后的证据源组合得到新的结果,反复执行,直到最后一个证据m'k参与组合后结束.
5 过程状态推理辨识分析
4台压力传感器安装在原油同一掺炼线管路不同测点测量压力,获得各自对应BPA,进而通过新的证据推理规则辨识管路处于“正常”、“过压”或“欠压”的具体状态.
新的证据推理规则具体推理辨识过程是先基于式(2)-(6)计算各传感器的众信度,按式(7)对不同传感器的BPA进行修正,修正后的证据信息按传感器的众信度大小由小到大排列;然后按式(8)依次对其组合推理,获得原油调合运行状态的最终辨识结果.
5.1 传感器低冲突情况
若4台压力传感器工作正常,各传感器证据间冲突较小,其各自BPA如下:m1(Q)=0.213,m1(R)=0.787,m1(S)=0.000;m2(Q)=0.200,m2(R)=0.700,m2(S)=0.100;m3(Q)=0.150,m3(R)=0.600,m3(S)=0.250;m4(Q)=0.120,m4(R)=0.650,m4(S)=0.230.
分别采用不同推理规则,对上述4个证据信息进行组合推理,结果见表1.
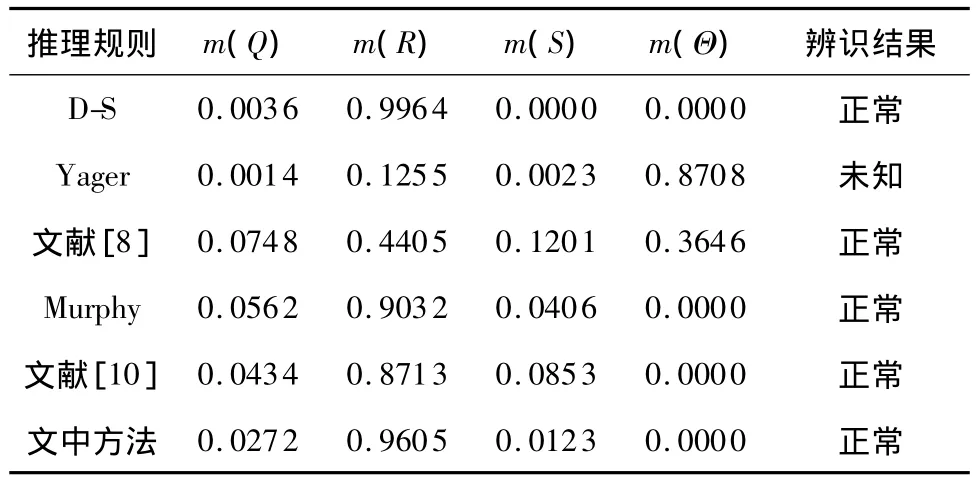
表1 传感器低冲突时不同规则对压力状态的推理辨识Table 1 Pressure status reasoning and identifying of different rules based on lightly conflicting sensor evidence
从表1可以看出,D-S推理规则对于传感器低冲突证据信息能取得令人非常满意的效果,4个证据推理结果中,命题R的概率赋值m(R)迅速趋近于1,说明系统能迅速识别出目标R,即掺炼线管道压力处于“正常”状态;而使用Yager规则、文献[8]规则进行推理辨识时,命题Q的概率赋值不但不会收敛到1,反而会发散,显然不合常理;Murphy规则、文献[10]规则和文中方法都能使命题Q的概率赋值收敛,但文中方法收敛速度最为迅速,组合结果和D-S规则得到的的结果最为接近.可见,新的推理辨识方法能有效组合原油调合过程状态辨识中的低冲突证据信息.
5.2 传感器高冲突情况
由于受恶劣环境影响或本身不可靠,若第1台压力传感器产生了细微异常证据信息;第2台和第4台压力传感器产生了严重异常证据信息.4台传感器的BPA具体变化为:m1(Q)=0.213,m1(R)= 0.780,m1(S)=0.007;m2(Q)=0.870,m2(R)= 0.000,m2(S)=0.130;m3(Q)=0.150,m3(R)= 0.600,m3(S)=0.250;m4(Q)=0.120,m4(R)= 0.800,m4(S)=0.080.即此时各传感器证据间存在较大冲突,采用不同推理规则进行推理,结果见表2.
从表2看出,D-S推理规则无法有效处理传感器高冲突情况,组合结果m(R)始终为0,尽管多数证据都支持目标R,但由于证据m2否定了R,结果系统永远无法识别目标为R.Yager推理规则中,增加的支持R的证据没有使组合结果m(R)增加,而是不断增加未知项m(Θ)的数值,显得过于保守,不利于决策.而且,D-S及Yager推理规则都存在“一票否决”问题,根本无法识别出目标.
文献[8]和Murphy推理规则可以部分克服前两种推理规则的缺点,但由于没有考虑到证据间相关性且冲突在全局进行分配,随着支持R的证据增多,m(R)的数值有所增加,但是增加速度都较慢,且文献[8]推理中未知项m(Θ)的数值也没有明显降低.系统只有在收集到4个证据时,两种方法才可以识别出目标.
文献[10]和文中新方法在收到第3个证据时,就可以正确识别出目标了.分析原因可以发现:当出现异常证据信息时,Murphy推理规则通过对证据简单平均来抵消“坏值”的影响,本例中m2(Q)= 0.87,说明第2个压力传感器的证据E2强烈支持目标Q管路“欠压”,这就需要更多的证据才能有效“抵消”“坏值”对结果的影响.而文献[10]和文中方法考虑了各个证据的有效性,有效地降低了“坏值”对最终组合结果的影响,使得在比较少的证据下就能收敛到正确目标.
文中提出的新推理辨识方法,在引入证据众信度表征全局有效性基础上,还将局部冲突进行了合理分配,从而可以比文献[10]方法更大程度地减少“坏值”对推理结果的影响,具有更快的收敛速度和更强的可靠性.随着支持R的证据越来越多,文中方法组合结果迅速向R聚焦;而文献[10]推理规则的组合结果中R的基本概率分配随着支持Q的证据越来越多并没有太大变化.可见,新的证据推理辨识方法对原油调合过程状态辨识中的传感器高冲突性证据信息组合同样也非常有效.
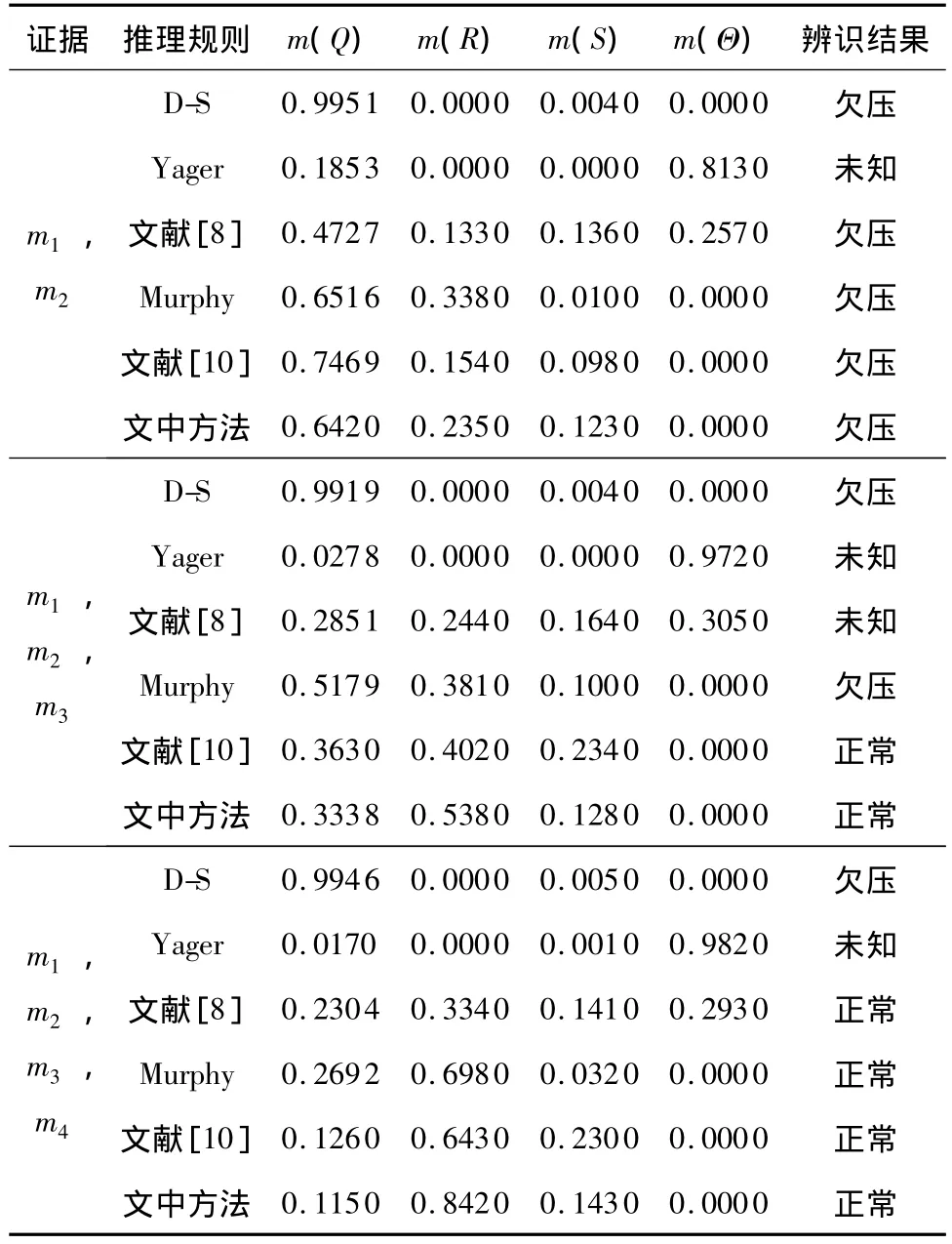
表2 传感器高冲突时不同规则对压力状态推理辨识Table 2 Pressure status reasoning and identifying of different rules based on heavily conflicting sensor evidence
6 结论
为获得原油管道调合过程状态的准确估计,文中提出一种新的推理辨识方法,实现了基于隶属度曲线的基本概率分配获取和基于证据源修正及局部冲突合理分配的证据推理.首先,基于传感器前期获得的物理量值与对应的实际运行状态,建立该传感器对某调合状态的隶属度曲线;在此基础上,传感器实时采集当前物理量,获取各传感器对状态子集的基本概率分配.然后,根据各传感器证据众信度表征的相关性对其进行修正、排序及推理;推理辨识过程中,对于焦元中的一致性部分采用乘性算子,对冲突部分在引起冲突的焦元间进行加性局部分配.数值仿真实验表明,新的过程状态推理辨识方法最大程度地减少了“坏值”对辨识结果和决策的影响,既能适应传感器低冲突证据信息的组合,同样又能有效处理传感器高冲突证据信息的融合.新的推理辨识方法可以充分利用原油管道调合过程多传感器的一致性或冲突性信息,提高状态辨识的收敛速度,减小误判率,降低决策风险,增强系统可靠性.
[1] 蔡智,黄维秋,李为民,等.油品调合技术[M].北京:中国石化出版社,2006.
[2] 刘准钆,程咏梅,潘泉,等.多传感器冲突信息的加权融合算法[J].传感技术学报,2009,22(3):366-370. Liu Zhun-ga,Cheng Yong-mei,Pan Quan,et al.Weight evidence combination for multi-sensor conflict information[J].Chinese Journal of Sensors and Actuators,2009,22 (3):366-370.
[3] Dempster A.Upper and lower probabilities induced by a multivalued mapping[J].Annals of Mathematical Statistics,1967,38(2):325-339.
[4] Shafer G.A mathematic theory of evidence[M].Princeton:Princeton University Press,1976:22-34.
[5] 于洪珍,徐立中,王慧斌.监测监控信息融合技术[M].北京:清华大学出版社,2011:143-157.
[6] Yager R R.On the relationships of methods of aggregation of evidence in expert systems[J].Cybernetics and Systems,1985,16(1):1-21.
[7] Yager R R.On the Dempster-Shafer framework and new combination rules[J].Information Sciences,1987,41 (2):93-138.
[8] 孙全,叶秀清,顾伟康.一种新的基于证据理论的合成公式[J].电子学报,2000,28(8):117-119. Sun Quan,Ye Xiu-qing,Gu Wei-kang.A new combination rules ofevidence theory[J].Acta Electronica Sinica,2000,8(8):117-119.
[9] Murphy C K.Combining belief functions when evidence conflicts[J].Decision Support Systems,2000,29(1):1-9.
[10] 邓勇,施文康,朱振福.一种有效处理冲突证据的组合方法[J].红外与毫米波学报,2004,23(1):27-32. Deng Yong,Shi Wen-kang,Zhu Zhen-fu.Efficient combination approach of conflict evidence[J].Journal of Infrared and Millimeter Waves,2004,23(1):27-32.
[11] Chen S J,Chen S M.Fuzzy risk analysis based on similarity measures of generalized fuzzy numbers[J].IEEE Transactions on Fuzzy Systems,2003,11(1):45-56.
[12] Deng Yong,Shi Wen-kang,Liu Qi.Combining belief function based on distance of evidence[J].Decision Support Systems,2004,38(3):489-493.
[13] Xu Hong,Smes P.Some strategies for explanations in evidential reasoning[J].IEEE Transactions on Systems,Man and Cybernetic-Part A:Systems Human,1996,26 (5):599-607.
[14] Zadeh L.A mathematical theory of evidence[J].The AI Magazine,1984,5(3):81-83.
[15] Jousselme A L,Dominic G,Bossé E.A new distance between two bodies of evidence[J].Information Fusion,2001,2(2):91-101.
[16] 冯海山,徐晓滨,文成林.基于证据相似性度量的冲突性区间证据融合方法[J].电子与信息学报,2012,34(4):852-857. Feng Hai-shan,Xu Xiao-bin,Wen Cheng-lin.A new fusion method of conflicting interval evidence based on the similarity measure of evidence[J].Journal of Electronics&Information Technology,2012,34(4):852-857.
猜你喜欢
化工设计通讯(2022年9期)2022-10-10 08:33:50
环球时报(2022-04-16)2022-04-16 14:38:15
石油沥青(2021年2期)2021-07-21 07:39:50
井冈教育(2020年6期)2020-12-14 03:04:32
西南石油大学学报(社会科学版)(2016年1期)2016-12-01 05:21:26
能源(2016年2期)2016-12-01 05:10:43
石油知识(2016年2期)2016-02-28 16:20:15
声屏世界(2015年8期)2015-02-28 15:20:26
浙江人大(2014年6期)2014-03-20 16:20:40
华东理工大学学报(自然科学版)(2014年3期)2014-02-27 13:49:00